基于MSC—51單片機垃圾分類收集系統的設計
2017-05-10 20:55:10羅素楓
中國新技術新產品 2017年10期
關鍵詞:單片機
羅素楓
摘 要:在我國城市現代化的快速建設進程中,我國的城市垃圾仍然采用混裝回收和運輸的處理方式,這就加大了后期處理工作的難度,并且也帶來了諸多的問題。為了更好地解決這類問題,就設計了以AT89S52單片機為核心的智能垃圾分類收集系統,這一系統應由兩部分組成,分別為無人操作垃圾收集車和回收站控制系統,借助于LCD顯示電路和無線通信技術,前者可以實現尋找垃圾桶、路線行駛、垃圾的上下車、垃圾的分類和垃圾的入站等功能,后者則可以監控整個操作過程,采用這一系統不但節約了大量的人力、物力和財力,同時也有效地降低了垃圾進站后的分類處理難度,具有較高的應用價值。
關鍵詞:單片機;垃圾分類收集;系統設計
中圖分類號:R246 文獻標識碼:A
1.系統的結構和功能
1.1 系統的整體結構
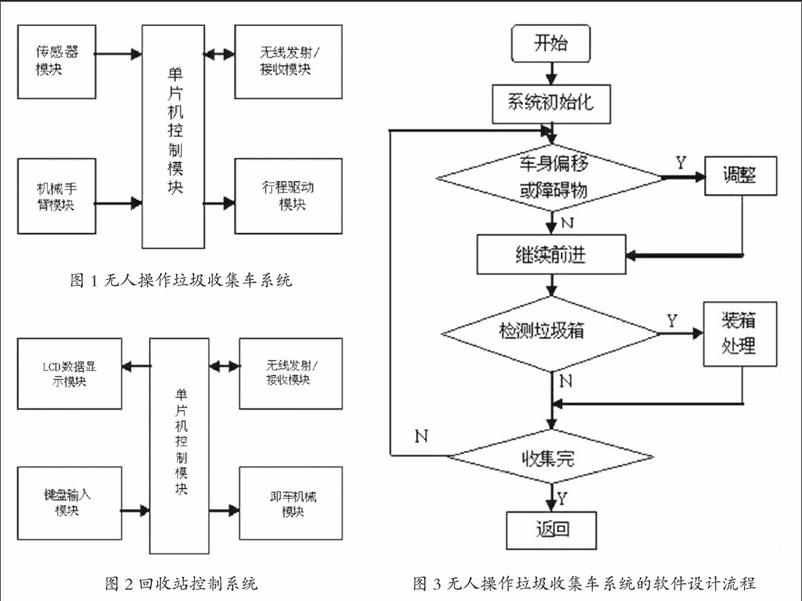
這一系統設計由兩部分組成,分別是無人操作垃圾收集車系統和回收站控制系統,前者主要包括單片機控制模塊、傳感器模塊、行程驅動模塊、機械手臂模塊以及無線接收和無線發射模塊,而后者則包含了單片機控制模塊、卸車機械模塊、鍵盤輸入模塊、數據顯示模塊以及無線接收和無線發射模塊,他們的控制器件都是AT89S52單片機,借助于各自的無線接收和無線發射模塊實現了數據的傳送和接收,如圖1和圖2所示。
1.2 系統的具體功能
當采用這一系統并開啟后,無人操作垃圾收集車能夠沿著事先已經設定好的線路行駛,當檢測到垃圾桶的位置后,那么借助于無線發射和無線接收模塊,就能將無人操作垃圾收集車的實時工作狀態發送給回收站控制系統。回收站控制系統在接收到信息后,其就會發送指令以控制垃圾收集車的行駛方向、車速以并控制好機械手臂的動作,此時垃圾收集車就會啟動機械手臂并將垃圾桶中的垃圾分類導入車內的集裝箱中。任務完成后,無人操作垃圾收集車就會沿原路自動返回,此時同樣會將返回信息傳送給回收站控制系統,回收站控制系統發出指令并啟動卸車機械模塊,垃圾車會將車上的垃圾集裝箱卸載下來,任務完成后,垃圾收集車返回到停車場。
2.無人操作垃圾收集車系統的設計
2.1 系統硬件的設計
無人操作垃圾收集車的硬件系統采用單片機和兩個光電傳感器。其中,單片機采用的傳感器信號,其能夠有效地處理信號,并能夠準確地控制直流減速電機的加速和減速以及正轉和反轉;左右兩側各有一個光電傳感器并安裝在車底,光電傳感器具有很多優勢,如操作簡單、安裝方便以及體積小等。兩者共同構成了無人操作垃圾收集車系統,并能夠實現無熱車的沿軌道行駛、原地調頭、加速、左轉以及右轉等功能。
2.2 系統軟件的設計
在垃圾收集車的行駛過程中,光電傳感器能夠采集到信號并傳送給單片機,單片機在接收到信號會立即進行判斷,從而明確垃圾收集車應該執行的任務。光電傳感器會先采集到垃圾箱的位置信號并傳送給單片機,而單片機也會對信號進行判定,從而確定垃圾回收車是否應該停下來以及是否要用機械手臂夾住垃圾桶并將垃圾分類的倒入集裝箱中,針對每一個垃圾桶,系統都會如此反復的作業,全部收集好后將垃圾箱送到回收站,其具體的軟件設計圖如圖3所示。
3.回收站控制系統的設計
3.1 回收站控制系統的硬件設計。其硬件部分主要包括兩大機構,分別是上車機構和下車機構,前者的主要任務是在無人操作垃圾收集車出站之前將垃圾箱都裝上車,而后者的任務就是將在車上的垃圾箱取下來,在無線通信模塊的支持下,回收站能夠與垃圾收集車進行實時的信息通信,通信后單片機能夠立即處理接到的信號并控制步進電機,從而實現垃圾箱的上車和下車操作。
3.2 回收站控制系統的軟件設計
要想真正的實現垃圾桶的上下車作業,那么就必須結合好三大設備,它們是直流減速電動機、行程開關和金屬舵機,而金屬舵機采用的是PWM信號,它的上升沿和下降沿的時間寬度是其最大特點,在無人操作垃圾收集車的行駛過程中,傳感器會先檢測到垃圾桶的位置并且車會停止行駛,舵機啟動并能夠夾住垃圾桶,此時直流減速電動機會啟動并且正轉運行,機械手臂會上升到一定高度,之后直流減速電動機會停止運轉并延時運行,在將垃圾桶內的垃圾倒出后,直流減速電動機又重新啟動并反轉運行并將垃圾桶放回到原來位置,之后機械手松開并且舵機和直流減速電動機都處于反轉運行的狀態,這就實現了垃圾桶的上車和下車任務,如此反復的分類收集到每一個垃圾桶內的垃圾。
在無人操作垃圾收集車的進站和出站過程中,借助于無線通信技術其就會與回收站控制系統傳送信息,回收站控制系統在接收到垃圾收集車即將到達的信息后,此時回收站控制系統就會做好取下垃圾回收車上垃圾集裝箱的準備。本系統上采用的無線接收模塊為TDL-9915,采用的無線發射模塊為TK200-T,適當地改裝現有的無線發射模塊,單片機控制接鍵接通,而借助鎖存技術能夠實現無線發射模塊和無線接收模塊的通信功能,其具有干擾少、靈敏度高、消耗低以及穩定性好的優點,并且能夠準確并且高效地完成自動垃圾桶的上車和下車任務。
結語
綜上所述,對此系統進行了一定時間的測試,無人操作垃圾收集車和回收站控制系統的工作性能都是十分穩定的,在道路空閑或是深夜時,垃圾收集車都可以工作并能夠沿著既定路線行駛,能夠分類的收集可回收垃圾和不可回收垃圾,并將收集到的垃圾送往回收站,保證了我國道路交通的順利通行,并真正地解決了現階段中小城市垃圾混合收集困難的問題,為我國建立環保節約型社會提供了有力保障。
參考文獻
[1]王晶.全國大學生機械創新設計大賽決賽作品集[M].北京:高等教育出版社,2011.
[2]李秀麗.城市生活垃圾智能分類收集系統的探索研究[J].中國會議,2014.
[3]趙麗君.建立我國城市垃圾分類收集處理系統的探討[D].西安電子科技大學,2015.
[4]李彥富.北京市垃圾分類收集系統淺談[J].環境衛生工程,2013(6):30.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
