基于LabVIEW的風(fēng)力機(jī)最大功率點(diǎn)跟蹤仿真研究
2017-05-08 14:42:05李超蘇禹張恩林顯富??
計(jì)算技術(shù)與自動(dòng)化 2017年1期
李超+蘇禹 張恩+林顯富??

摘要:基于風(fēng)力機(jī)的發(fā)電效率因環(huán)境風(fēng)速變化而改變,本文選用LabVIEW為仿真平臺(tái)建立風(fēng)力機(jī)最大功率點(diǎn)的追蹤系統(tǒng)。首先根據(jù)風(fēng)力機(jī)的風(fēng)能捕獲輸出功率公式,在LabVIEW平臺(tái)上搭建了風(fēng)力機(jī)系統(tǒng)模塊、風(fēng)力機(jī)控制模塊、風(fēng)輪轉(zhuǎn)速調(diào)節(jié)模塊、風(fēng)速變化判斷模塊等。為了彌補(bǔ)傳統(tǒng)擾動(dòng)法存在的追蹤精度等問(wèn)題,利用變步長(zhǎng)的擾動(dòng)觀測(cè)法對(duì)輸出功率進(jìn)行最大功率點(diǎn)追蹤,使風(fēng)力機(jī)的輸出功率保持在最大輸出功率。實(shí)驗(yàn)結(jié)果表明該系統(tǒng)在不同的仿真風(fēng)速環(huán)境下,能有效的追蹤風(fēng)力機(jī)最大輸出功率點(diǎn)。
關(guān)鍵詞:風(fēng)力機(jī);LabVIEW;變步長(zhǎng)擾動(dòng)觀測(cè)法
中圖分類號(hào):TK89文獻(xiàn)標(biāo)識(shí)碼:ADOI:10.3969/j.issn.10036199.2017.01.006
1引言
隨著我國(guó)經(jīng)濟(jì)的迅速發(fā)展,能源需求也在不斷提高,我國(guó)已是能源消費(fèi)大國(guó)之一[1]。面對(duì)日趨緊張的局勢(shì),可持續(xù)發(fā)展的理念已得到大家的共識(shí),越來(lái)越多的國(guó)家將注意力放在了新能源的研究與開(kāi)發(fā)上。
我國(guó)地域遼闊,海岸線3.2萬(wàn)公里,風(fēng)能資源十分豐富,而且風(fēng)力發(fā)電日益受到世界各國(guó)的青睞,成本也越來(lái)越低。據(jù)歐洲風(fēng)能協(xié)會(huì)預(yù)測(cè),風(fēng)力發(fā)電成本將會(huì)繼續(xù)降低,到2020年,有望達(dá)到3美元/度[2]。綜上所述,為了最大限度的利用風(fēng)能,需對(duì)其最大功率點(diǎn)進(jìn)行追蹤,使其可以保持在最大功率點(diǎn)輸出。
常見(jiàn)的風(fēng)力發(fā)電機(jī)最大功率點(diǎn)跟蹤控制算法主要有最佳葉尖速比法[3][4]、功率信號(hào)反饋法[5][6]和擾動(dòng)觀察法[7][8]等。最佳葉尖速比法控制原理簡(jiǎn)單,需要預(yù)先知道風(fēng)機(jī)的最佳葉尖速比λ,同時(shí)還需要安裝測(cè)速儀對(duì)風(fēng)速和風(fēng)機(jī)轉(zhuǎn)速進(jìn)行測(cè)量,這增加了系統(tǒng)成本,也降低了系統(tǒng)的可靠性;功率信號(hào)反饋法控制原理簡(jiǎn)單,風(fēng)力機(jī)輸出功率的波動(dòng)也相對(duì)較小,由于需要測(cè)量風(fēng)機(jī)轉(zhuǎn)速和預(yù)先準(zhǔn)確地測(cè)得風(fēng)力機(jī)的最大功率曲線,這就影響了控制精度,增加了成本;傳統(tǒng)擾動(dòng)法不需要測(cè)量風(fēng)速及風(fēng)機(jī)轉(zhuǎn)速,也不需要預(yù)先測(cè)得風(fēng)力機(jī)的最大功率曲線,但步長(zhǎng)的選擇是一大難點(diǎn),當(dāng)步長(zhǎng)較大時(shí)最大功率跟蹤速度快,但在最大功率點(diǎn)附近會(huì)出現(xiàn)較大的功率振蕩;步長(zhǎng)較小時(shí),最大功率點(diǎn)附近的功率振蕩會(huì)顯著減弱,但系統(tǒng)對(duì)外界環(huán)境變化的響應(yīng)能力會(huì)變差。為了彌補(bǔ)以上問(wèn)題,使用改進(jìn)的擾動(dòng)法對(duì)風(fēng)力機(jī)的最大功率點(diǎn)進(jìn)行追蹤。
LabVIEW具有良好的人機(jī)交互界面、計(jì)算機(jī)圖形化顯示可以讓研究人員更清楚的看出風(fēng)力機(jī)的最大功率點(diǎn)進(jìn)行追蹤的實(shí)時(shí)情況,而其本身是圖形化編程語(yǔ)言,且提供各種接口總線和常用儀器的驅(qū)動(dòng)程序,用戶可將其與測(cè)量硬件連接,方便地完成信號(hào)數(shù)據(jù)采集、信號(hào)分析、數(shù)據(jù)存儲(chǔ)以及數(shù)據(jù)處理等許多通常的任務(wù)。本文基于LabVIEW仿真平臺(tái)對(duì)風(fēng)力機(jī)最大功率點(diǎn)進(jìn)行追蹤。
2風(fēng)力機(jī)最大輸出功率追蹤設(shè)計(jì)的原理
3穩(wěn)定輸出最大功率的控制策略
4LabVIEW仿真設(shè)計(jì)
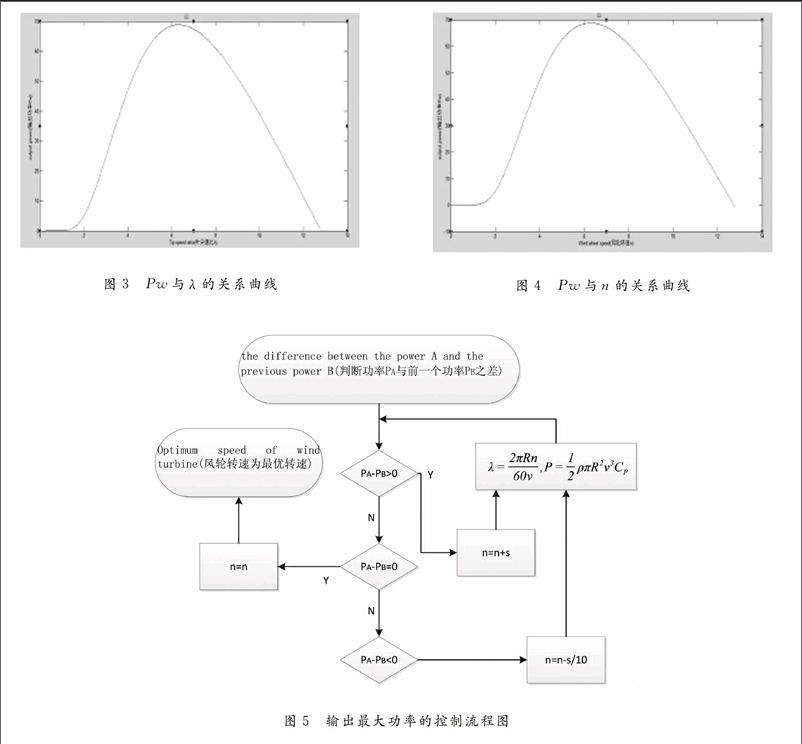
系統(tǒng)采用模塊化設(shè)計(jì)思想,即將風(fēng)力機(jī)的各部分控制模塊設(shè)計(jì)成子VI。該風(fēng)力機(jī)系統(tǒng)主要包括求取利用系數(shù)Cp模塊、風(fēng)速變化判斷模塊、風(fēng)輪轉(zhuǎn)速調(diào)節(jié)模塊、求取輸出功率模塊等。根據(jù)控制流程圖圖5,在LabVIEW軟件中,將各個(gè)模塊編程后進(jìn)行整合,實(shí)現(xiàn)系統(tǒng)的總體設(shè)計(jì),并選用條件循環(huán)結(jié)構(gòu)作為總體結(jié)構(gòu),程序框圖如圖6所示:
4.1風(fēng)速變化判斷模塊
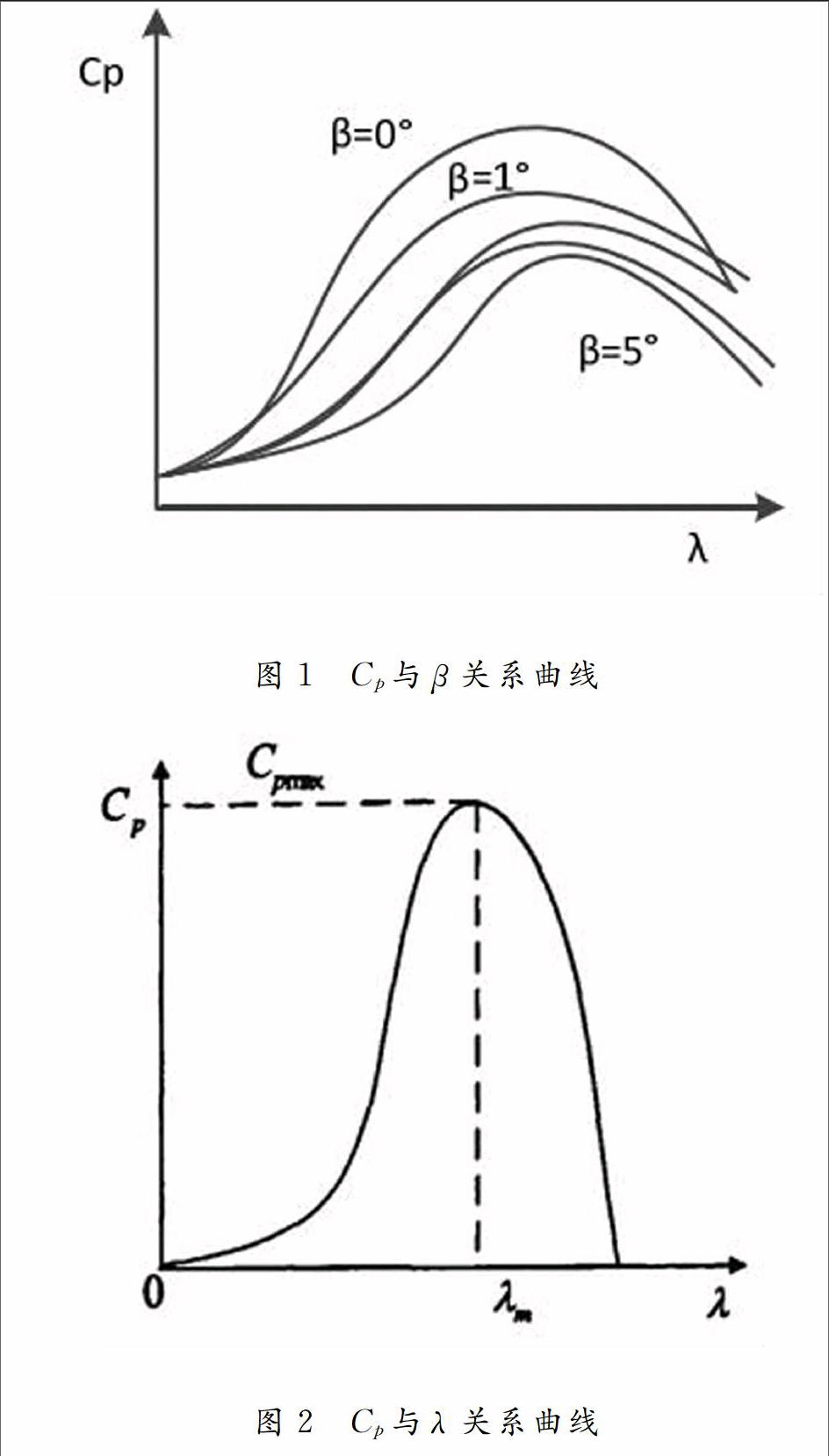
根據(jù)公式(5)可知,葉尖速比與風(fēng)速成反比,因此風(fēng)能利用系數(shù)Cp是變化的。所以,對(duì)于風(fēng)速的變化,也需進(jìn)行考慮。
風(fēng)速變化情況的判斷:對(duì)風(fēng)速進(jìn)行實(shí)時(shí)采集,并作為一個(gè)輸入變量,并與上次的風(fēng)速變量進(jìn)行運(yùn)算比較,由差值來(lái)判斷風(fēng)速變化情況,進(jìn)而對(duì)風(fēng)速變量進(jìn)行調(diào)整,并決定是否把觸發(fā)信號(hào)傳送給風(fēng)輪轉(zhuǎn)速調(diào)節(jié)模型子VI,為了防止風(fēng)速突變而引起的輸出功率突變,在程序塊中額外添加調(diào)整風(fēng)速變量,使系統(tǒng)更趨于穩(wěn)定。系統(tǒng)中風(fēng)速變化為每秒增加0.05 m/s,而且還有10 ms的等待時(shí)間,因此系統(tǒng)可得到很好的緩沖。其程序框圖如圖7所示: 4.2風(fēng)輪轉(zhuǎn)速調(diào)節(jié)模塊
觀察曲線圖三與圖四后,決定采用擾動(dòng)觀測(cè)法,但是傳統(tǒng)擾動(dòng)法步長(zhǎng)是固定的,當(dāng)步長(zhǎng)較大時(shí)最大功率跟蹤速度快,但在最大功率點(diǎn)附近會(huì)出現(xiàn)較大的功率振蕩,從而無(wú)法做到對(duì)最大功率點(diǎn)的跟蹤;步長(zhǎng)較小時(shí),最大功率點(diǎn)附近的功率振蕩會(huì)顯著減弱,但系統(tǒng)對(duì)外界環(huán)境變化的響應(yīng)能力會(huì)變
4.3風(fēng)力機(jī)系統(tǒng)前面板
風(fēng)力機(jī)系統(tǒng)模型主要實(shí)現(xiàn)參數(shù)修改及波形監(jiān)控的功能,建立一個(gè)的虛擬風(fēng)力機(jī)模型,風(fēng)力機(jī)系統(tǒng)主界面主要通過(guò)按鈕開(kāi)關(guān)啟動(dòng),開(kāi)關(guān)啟動(dòng)后,風(fēng)機(jī)半徑及風(fēng)速的數(shù)據(jù)傳送給風(fēng)力機(jī)控制模塊,最后計(jì)算出功率,并給出了數(shù)值顯示模塊及波形圖。
5結(jié)果與分析
圖9中,AB段為在風(fēng)機(jī)半徑為0.8 m,風(fēng)速為7 m/s的情況下,風(fēng)機(jī)開(kāi)始啟動(dòng)到最大功率點(diǎn)的過(guò)程,其中曲線1為加入了改進(jìn)擾動(dòng)法的風(fēng)力機(jī)輸出功率曲線;曲線2為無(wú)控制算法的風(fēng)力機(jī)系統(tǒng)仿真曲線;曲線3為加入了傳統(tǒng)擾動(dòng)法的風(fēng)力機(jī)輸出功率曲線;BC段為風(fēng)速上升到8 m/s時(shí)的仿真曲線,從圖中可看出,無(wú)控制算法的風(fēng)力機(jī)在風(fēng)速變化的情況下會(huì)突變,這對(duì)于硬件壽命及電路安全都是有很大影響的,而加入了控制算法的風(fēng)力機(jī)曲線緩慢上升,系統(tǒng)得到了緩沖,減小了功率突變;CD段為風(fēng)速下降回7 m/s時(shí)的仿真曲線,無(wú)控制算法的風(fēng)力機(jī)由于風(fēng)輪轉(zhuǎn)速過(guò)大,已經(jīng)有下降的趨勢(shì),當(dāng)風(fēng)速降低時(shí),發(fā)生了突降,然后風(fēng)輪轉(zhuǎn)速繼續(xù)上升,輸出功率下降;加入了控制算法的風(fēng)力機(jī)根據(jù)風(fēng)速變化緩慢變化,且能夠保持著最大功率輸出,但是從BD這一過(guò)程可以看出,使用傳統(tǒng)擾動(dòng)法的曲線3存在著明顯的振蕩,而運(yùn)用改進(jìn)擾動(dòng)法的曲線1穩(wěn)定地輸出功率,而且輸出功率的波動(dòng)有減輕,在輸出功率顯示框中可看出當(dāng)?shù)竭_(dá)最大輸出功率時(shí),數(shù)值相對(duì)穩(wěn)定。仿真結(jié)果顯示改進(jìn)擾動(dòng)法對(duì)風(fēng)力機(jī)最大功率點(diǎn)追蹤是穩(wěn)定有效的。
參考文獻(xiàn)
[1]馬川.我國(guó)能源利用的現(xiàn)狀及對(duì)策[J].國(guó)土資源導(dǎo)刊,2007,(1):40-41.
[2]鄭曉菁,風(fēng)力發(fā)電節(jié)能技術(shù)的狀況分析[J].中國(guó)西部科技,2010,(2):42-43.
[3]程啟明,程尹曼,汪明媚,等.風(fēng)力發(fā)電系統(tǒng)中最大功率點(diǎn)跟蹤方法的綜述[J].華東電力,2010,(9):1393-1399.
[4]李咸善,徐浩,杜于龍.采用葉尖速比法和爬山搜索法相結(jié)合的風(fēng)力發(fā)電系統(tǒng)最大功率點(diǎn)跟蹤研究[J].電力系統(tǒng)保護(hù)與控制,2015,(13):66-71.
[5]肖玉華.離網(wǎng)型風(fēng)光互補(bǔ)發(fā)電系統(tǒng)的研究與設(shè)計(jì)[D].武漢理工大學(xué),2010,(5).
[6]周興偉,周波,郭鴻浩,等.電勵(lì)磁雙凸極風(fēng)力發(fā)電機(jī)系統(tǒng)MPPT控制策略的對(duì)比[J].電源學(xué)報(bào),2014,(11):48-52.
[7]夏安俊.風(fēng)力發(fā)電機(jī)組最大功率點(diǎn)跟蹤控制系統(tǒng)的研究[D].無(wú)錫:江南大學(xué),2008.
[8]倪雨,郝帥翔.擾動(dòng)觀測(cè)法控制MPPT系統(tǒng)運(yùn)動(dòng)特性分析[J].電子學(xué)報(bào),2015,(7):1388-1394.
[9]宋海輝.風(fēng)力發(fā)電技術(shù)及工程[M].北京:水利水電出版社,2009.
[10]于群,曹娜.MATLAB/Simulink電力系統(tǒng)建模與仿真[M].北京:機(jī)械工業(yè)出版社,2011.
