一種基于序貫Monte Carlo算法的交通事件重構方法
2017-05-08 21:15:47黃宇達魏霞王迤冉
計算技術與自動化 2017年1期
黃宇+達魏霞 王迤冉


摘要:為了能準確地重構出當前道路場景中的交通流事件,需要合適的模型與方法以及能夠代表交通流狀態的實時數據。基于交通流非線性非高斯的特點,提出了一種基于序貫Monte Carlo方法的交通流堵塞事件重構模型。提出的模型能夠不斷的同化真實道路上實時的傳感器數據使仿真中的交通流狀態與真實路況不斷接近。通過分析仿真數據推測出當前真實道路上的堵塞事件及其相關屬性,并據此在仿真環境中模擬堵塞,進而實現對真實道路上堵塞事件的重構。理論研究和實驗結果表明該模型能夠根據重構結果評估當前的道路狀況,合理推測引起擁堵的位置與堵塞范圍。
關鍵詞:城市交通;交通流仿真模型;序貫蒙特卡洛算法;動態數據驅動;堵塞事件;事件重構
中圖分類號:TP391.9,TP391.41文獻標識碼:ADOI:10.3969/j.issn.10036199.2017.01.030
1引言
為解決日益嚴重的交通擁堵問題,研究預測交通流規律的方法與模型,重構交通事件以及探索有效緩解交通擁堵問題的方案已經成為當前的研究熱點。交通流具有非高斯、非線性、高維隨機的特點,僅通過靜態數據則很難準確重構出上述事件。如果對能夠反映道路關鍵性質的實時數據加以充分合理應用,是提高交通事件重構精確性的有效方法之一[1]。
事件重構如今在很多領域都有著較為廣泛的應用,比如數字濾波[2]、電力系統[3]、微觀粒子研究[4]等。很多場景存在非線性、大數據等特點,導致事件重構的過程十分復雜,引起了學術界的重視。比如,在文獻[5]中,作者就提出并實現了一個基于動態數據驅動的火災蔓延預測模型(DEVS-FIRE),該模型使用序貫Monte Carlo方法(SMC),根據火災現場傳感器數據以及當地風向、地理數據來更新模型狀態進而跟蹤火災邊緣的變化。在交通系統中,SMC方法同樣也能夠很好地將實時數據進一步同化到仿真模型中來提高估計的精確度。文獻[6]中,作者詳細闡述了SMC算法在交通預測中的實驗原理,通過迭代過程中仿真與真實道路場景的交通流狀況的對比,進一步驗證了SMC算法在交通流預測中的合理性和可行性。
為了能夠準確評估交通流,本文結合動態數據驅動思想,并采用SMC算法,將能夠反應道路真實特征的實時傳感器數據同化到交通流重構模型中,根據仿真結果來動態調整實時數據類型及仿真模型,進而重構出當前道路上所發生的事件。
2相關概念
動態數據驅動應用系統(Dynamic Data Driven Application Systems,DDDAS)是由美國自然科學基金(NSF)在2000年所提出的一種研究概念。DDDAS允許一個運行著的系統來動態接受額外實時數據以便來選擇性的加強或重定義原模型;同樣,運行系統能夠控制實時數據,從而使仿真與實際相結合。經過十多年來的發展,DDDAS目前已經在材料損傷預測[7],光學跟蹤[8],無人機控制[9]等領域得到了較為廣泛的應用。在文獻[10]中,Darema F.等提出了制約DDDAS應用的4個關鍵問題:仿真系統、數學算法、系統軟件、測量接口。只要解決了上述四個問題,DDDAS能夠運用在很多復雜的場景狀態。
序貫Monte Carlo算法一般也稱為粒子濾波算法,是一種基于Monte Carlo算法來解決非線性非高斯動態系統的狀態遞歸估計問題的數據同化方法。SMC算法核心思想是利用狀態空間的一組加權隨機樣本粒子去逼近狀態的后驗概率分布,該概率分布僅僅是真實分布的一種近似,其非參數化的特點,使它有效擺脫了非線性濾波問題解決時所必須滿足高斯分布的約束條件問題,導致其對變量參數的非參數性有更強的建模能力,因此其在非線性、非高斯的系統中有著廣泛應用。SMC一般包含三個步驟:粒子產生、權重的計算和重采樣。
MovSim是由Arne Kesting, Martin Budden,Ralph Germ和Martin Treiber發起的基于車道的微觀交通仿真模型。其支持包括連續時間模型、迭代映射和元胞自動機模型等跟車模型。考慮到MovSim所具有的強大路網描述能力,以及其對各種車輛模型的支持以及方便研究者的特殊用途,再加上其開源的特性能夠方便我們對其增加SMC方法并對接收實時數據提供接口,所以本文選用MovSim作為交通流仿真平臺。
3基于SMC的交通流事件重構
3.1基于SMC的交通流事件重構框架
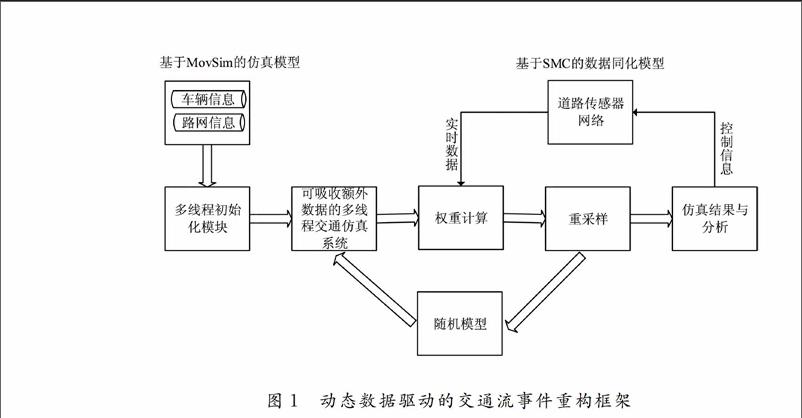
結合Darema F所提出的制約DDDAS應用的四個問題,本文采用MovSim作為仿真系統軟件的基礎,對其添加接收實時數據接口,并利用序貫Monte Carlo算法將測量數據同化到仿真模型中,從而提出圖1所示的交通流事件重構框架。該框架主要包括交通流仿真模型和數據同化模型。交通流仿真模型可根據統計的道路以及車輛的基本信息對仿真粒子加以初始化,并根據設定的跟車、換道等模型模擬車輛運行狀態,不斷仿真下一時刻的交通流數據;數據同化模型則結合DDDAS思想,利用SMC方法不斷的將能夠反映真實道路狀態對應的實時數據注入到仿真模型中,從而優化仿真模型中的粒子集,使其不斷接近真實道路場景。雖然該模型能夠解決普遍的交通流事件重構問題,但本文主要針對由于某種原因導致的堵塞事件進行重構。
3.2事件重構的方案設計
本文針對道路上的堵塞事件進行重構,其起因可以是一起交通事故或者車道檢修等致使道路上的若干車道無法通車。假設道路上無法通車的位置為P,并將道路記為N個路段的集合,則可以利用fData[1-N](t-1)表示t-1時刻各路段的交通流狀態。此刻,道路網的交通流狀態可以表示為RN(t-1)=fData[1-N](t-1),P。為了評估仿真系統中的車輛狀態,這里利用測量模型(MM)將仿真數據與實時交通數據加以對比。假設道路上預設了K組傳感器,每個傳感器都能夠監測到附近道路上諸如車輛平均速度、車輛密度等數據。在t-1時刻,傳感器監測的K組數據記為rData[1-k](t-1),因此t-1時刻真實的道路場景特征可以描述為:RRN(t-1)={rData[1](t-1),rData[2](t-1),…,rData[k](t-1)}。為方便仿真數據與實
