駕駛員反應能力及其人—車—環境仿真檢測平臺的搭建
2017-04-27 14:22:59弓馨梁龍凱
電子技術與軟件工程 2016年15期
弓馨++梁龍凱
摘 要 本文通過分析汽車駕駛員臨界反應能力對行車安全性的影響,得出良好的駕駛員臨界反應能力是決定行車安全性的關鍵因素;并提出基于人-車-環境的硬件在環仿真試驗條件可以測試駕駛員在不同路況下的反應能力,搭建了駕駛員反應能力檢測試驗平臺,可用于駕駛員的考核、訓練及后續研究。
【關鍵詞】駕駛員反應能力行車安全 檢測平臺
現今,我國道路交通事業發展迅猛, 交通事故、城市道路擁堵等現象也隨之大幅度增加,這樣的交通環境, 將對駕駛員的駕駛技能、身體素質提出更高的要求。影響行車安全的因素眾多,駕駛員對交通環境信息的臨界反應能力對行車安全的影響不可忽視。
1 駕駛員反應能力
駕駛員的反應能力是指駕駛員在復雜交通環境中,持續接收、分析行人和汽車狀態,在一定程度上預見變化,并在瞬間做出準確判斷的能力。
駕駛員反應能力主要體現在轉向行為能力和制動行為能力上,而緊急情況下駕駛員的轉向操作和制動操作將從根本上決定事故程度。反應能力對駕駛員十分重要, 外界客觀條件一致時,反應能力直接決定反應時間的多少。實驗證明車速30km/h的汽車,反應時間延長0.1s, 就要駛近1m,此距離將成為威脅生命的重要因素。因此,具有良好的臨界反應能力是保障行車安全的重要因素。
由以上分析可知,駕駛員反應能力對于行車安全有重要意義。因此建立駕駛員反應能力測試平臺十分重要,不僅能檢測駕駛員的臨界反應能力,而且能分析不同因素對于反應能力的影響,對于從根本上提高行車安全具有重要意義。
2 駕駛員反應能力檢測平臺
近年交通環境越來越復雜,我們有必要采用人-車-環境全景仿真的試驗條件來進行駕駛員臨界反應能力的測試,用于篩選和訓練駕駛員,以及今后的深入研究。由于商用車事故率較大且造成的人員傷亡、財產損失也更大,因此本文采用TruckSim和LabVIEW軟件的聯合仿真實現檢測平臺的搭建。
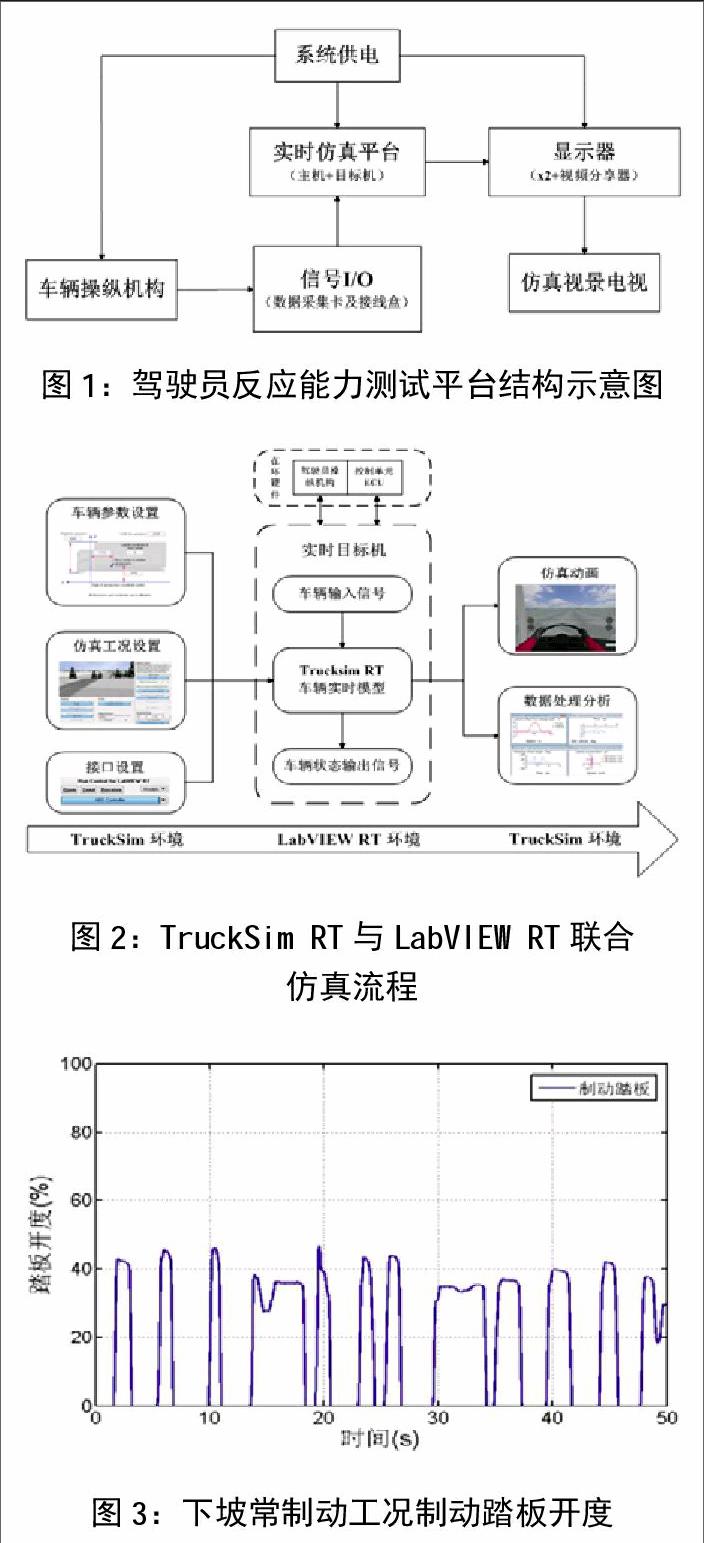
駕駛員反應能力測試平臺主要由實時仿真平臺、數據采集設備、車輛操縱機構、仿真環境顯示設備等組成,如圖1。駕駛員的操縱信號由數據采集設備輸送給實時仿真平臺,實時仿真平臺實時計算車輛的運行狀態,并將車輛的運行數據輸出給顯示器,仿真視景電視顯示即時駕駛環境。
2.1 檢測平臺的硬件
車輛操縱機構踏板、轉向盤及換擋桿,均由采購的實車零部件組成,可以最大程度的使檢測平臺具有實車的操縱感。例如檢測平臺的踏板選用的是自帶非接觸式霍爾傳感器的瑞立電子踏板型號11080100010,可將踏板開度以模擬電壓信號傳遞給實時車輛模型。除了駕駛員操縱機構外,檢測平臺還應具備駕駛輔助設備,如座椅、顯示器等,且各部分的相對位置應盡可能符合駕駛實際。
實時仿真平臺由主機和目標機組成,兩者間通過TCP/IP協議進行通訊。主機裝備TruckSim和LabVIEW軟件,可進行車輛模型參數設置、仿真工況設置,以及監視仿真程序的實時運行狀態,并能從目標機中導出后續研究和分析的試驗數據。目標機進行操縱信號采集,使實時車輛模型獲得駕駛操縱信息,并負責運行實時車輛模型。
檢測平臺的目標機采用型號為PXI-1042Q的NI工控箱,配備PXI-6259數據采集卡、SCB-68接線盒。目標機可通過LabVIEW的NI -DAQ 模塊,將采集的信號傳遞給實時車輛模型。
2.2 檢測平臺的程序設計
檢測平臺的實時程序借助于TruckSim RT實現,可運行于LabVIEW RT環境,運行速度比實時快約3-6倍,其聯合仿真流程如圖2所示。
檢測平臺實時程序包括主機程序和目標機程序。主機程序在主機運行,能實現主機、目標機程序的運行以及試驗數據保存的開關控制。目標機程序是總體程序的核心,采用平鋪式順序結構。兩個循環結構構成了程序主體,分別為駕駛員操縱信息的數據采集循環和TruckSim模型運行的定時仿真循環,即實時車輛模型的LabVIEW仿真架構。數據采集和TruckSim實時模型循環終止后實時數據跟蹤模塊進行數據保存。
總體程序中的數據傳輸采用的是共享變量的形式。主機與目標機間的數據通信借助網絡共享變量實現,目標機兩個循環間通過單進程共享變量進行數據傳遞。
2.3 檢測平臺的數據輸出
利用檢測平臺可以進行不同工況的人-車-環境硬件在環仿真試驗,獲得駕駛員在不同試驗工況下的轉向及制動操縱數據,用于駕駛員反應能力的分析。圖3為利用檢測平臺獲得的駕駛員在下坡常制動工況下的制動踏板數據。
參考文獻
[1]于增亮.基于仿真環境駕駛員臨界反應能力的研究[D].長春:吉林大學,2005.
[2]唐陽山,夏道華.不同駕駛員反應時間對汽車防撞安全距離的影響研究[J].科學技術與工程,2016.
[3]王龍.基于虛擬駕駛環境的駕駛員反應時間采集和測算研究[J].交通工程,2012.
作者簡介
弓馨,現為東北師范大學人文學院講師。研究方向為汽車動態仿真與控制。
作者單位
東北師范大學人文學院 吉林省長春市 130025
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
人大建設(2019年12期)2019-05-21 02:55:44
中國生殖健康(2019年11期)2019-01-07 01:28:02
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
公民與法治(2016年4期)2016-05-17 04:09:26