Narendra自適應(yīng)控制器在球桿系統(tǒng)的應(yīng)用與研究
2017-04-24 12:00:24郝洋洋
自動(dòng)化儀表 2017年4期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
高 成,郝洋洋
(沈陽工業(yè)大學(xué)化工過程自動(dòng)化學(xué)院,遼寧 遼陽 111003)
Narendra自適應(yīng)控制器在球桿系統(tǒng)的應(yīng)用與研究
高 成,郝洋洋
(沈陽工業(yè)大學(xué)化工過程自動(dòng)化學(xué)院,遼寧 遼陽 111003)
作為經(jīng)典的試驗(yàn)設(shè)備之一,球桿系統(tǒng)具有開環(huán)不穩(wěn)定和非線性這兩大特性,是控制理論研究的典型對(duì)象,是自動(dòng)控制試驗(yàn)室常用裝置,是試驗(yàn)人員實(shí)踐控制理論基礎(chǔ)的平臺(tái),也是驗(yàn)證設(shè)計(jì)人員的新想法、新思路的典型設(shè)備。建立了球桿系統(tǒng)及其數(shù)學(xué)模型,對(duì)某些環(huán)節(jié)進(jìn)行了線性化處理,得到整個(gè)球桿系統(tǒng)的簡(jiǎn)化模型,作為被控對(duì)象的傳遞函數(shù)。基于球桿系統(tǒng)傳遞函數(shù)的特點(diǎn),設(shè)計(jì)了一種Narendra自適應(yīng)控制器,并在Matlab中的Simulink環(huán)境下進(jìn)行實(shí)時(shí)控制,以驗(yàn)證控制器的控制效果。仿真和試驗(yàn)結(jié)果都表明,與PID控制、根軌跡控制相比,自適應(yīng)控制具有更好的控制效果。自適應(yīng)控制理論為解決復(fù)雜系統(tǒng)控制問題開辟了新的途徑,已成為控制領(lǐng)域的研究和發(fā)展熱點(diǎn)。
控制理論; 自適應(yīng)控制器; 濾波器; 伺服電機(jī); 電機(jī)傳動(dòng)
0 引言
在控制理論的研究中,球桿系統(tǒng)是最為著名的試驗(yàn)設(shè)備之一,許多專家、學(xué)者都通過球桿系統(tǒng)對(duì)其研究的理論進(jìn)行驗(yàn)證。因球桿系統(tǒng)是一個(gè)經(jīng)典的非線性、單輸入單輸出、開環(huán)不穩(wěn)定系統(tǒng),且小球在導(dǎo)軌上的運(yùn)動(dòng)十分復(fù)雜,故球桿系統(tǒng)得到了廣泛的應(yīng)用。
球桿系統(tǒng)的基本控制思路是:通過控制直流伺服電動(dòng)機(jī)的正反轉(zhuǎn),帶動(dòng)傳動(dòng)機(jī)構(gòu)調(diào)節(jié)橫桿的傾斜角度,實(shí)現(xiàn)對(duì)小球運(yùn)動(dòng)的控制,進(jìn)而達(dá)到預(yù)期位置[1]。本文采用牛頓-歐拉公式建立球桿系統(tǒng)的數(shù)學(xué)模型,并根據(jù)該數(shù)學(xué)模型選擇合適的控制器。
1 系統(tǒng)建模
球桿系統(tǒng)是典型的非線性系統(tǒng),其運(yùn)動(dòng)機(jī)構(gòu)具有許多非線性特點(diǎn),包括:飽和、死區(qū)特性,直流伺服電動(dòng)機(jī)、帶輪和連動(dòng)桿傳動(dòng)的非線性,小球運(yùn)動(dòng)軌跡的非線性,小球運(yùn)動(dòng)過程中受到空氣及非絕對(duì)光滑的導(dǎo)軌產(chǎn)生的非線性阻力。 因此,對(duì)小球在導(dǎo)軌表面運(yùn)動(dòng)動(dòng)態(tài)過程的完整描述是十分復(fù)雜的,建模的目的是對(duì)該控制系統(tǒng)給出一個(gè)較為簡(jiǎn)單的模型[2-3]。球桿系統(tǒng)機(jī)械結(jié)構(gòu)如圖1所示。
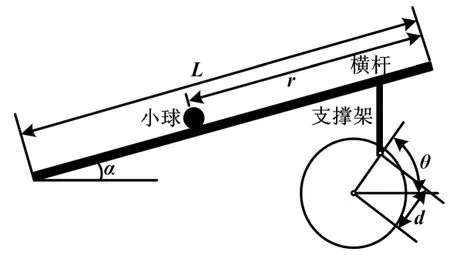
圖1 球桿系統(tǒng)機(jī)械結(jié)構(gòu)示意圖
電機(jī)帶動(dòng)帶輪轉(zhuǎn)動(dòng),連接線(皮帶輪中心到支撐架與皮帶輪連接點(diǎn)的連接線)和水平線的夾角角度為θ(θ有相應(yīng)的限定范圍);連桿隨之帶動(dòng)橫桿轉(zhuǎn)動(dòng),角度為α;橫桿轉(zhuǎn)動(dòng)過程中,小球因重力作用開始在橫桿內(nèi)滾動(dòng)[4]。
皮帶輪中心到支撐架與皮帶輪連接點(diǎn)的距離為d,橫桿的長(zhǎng)度值為L(zhǎng),由此可得出傾斜角α與θ之間的近似數(shù)學(xué)關(guān)系式為:
(1)
式中:d為齒輪半徑,d=45 mm;L為支撐桿橫桿連接點(diǎn)的長(zhǎng)度,L=400 mm[5]。
電動(dòng)機(jī)傳動(dòng)軸和θ之間存在一個(gè)同步帶(減速比n=4),控制器的設(shè)計(jì)目的是通過整定θ,保證小球在特定位置保持平衡。
通過運(yùn)動(dòng)學(xué)對(duì)小球的運(yùn)動(dòng)情況進(jìn)行分析,其慣量、重力、轉(zhuǎn)角、位移之間的關(guān)系為[6-7]:
(2)
假設(shè)小球在橫桿上的運(yùn)動(dòng)為滾動(dòng),且摩擦力可以忽略不計(jì),α很小,則:
sinα=α
(3)

(4)
將式(2)~式(4)化簡(jiǎn),得:
(5)
將式(1)代入式(5),可得:
式中:r為系統(tǒng)輸出量,是小球在平衡桿上的位置;θ為輸入量,是轉(zhuǎn)盤的轉(zhuǎn)角。
當(dāng)以θ為系統(tǒng)輸入量時(shí),r和θ的傳遞函數(shù)為:
2 Narendra自適應(yīng)控制器的設(shè)計(jì)
被控對(duì)象的狀態(tài)、輸出方程分別為:
(6)
yp=hTxp
(7)
式中:Ap、bp為未知量;xp為n維狀態(tài)向量;yp為輸出量;u為控制量;h為n×1維向量。
因此,被控系統(tǒng)的傳遞函數(shù)為:
Gp(s)=hT(sI-Ap)-1bp=kpNp(s)/Dp(s)
(8)
式中:kp為被控對(duì)象增益。
選取參考模型為:
xm=Amxm+bmyr
(9)
ym=hTxm
(10)
式中:yr為輸入信號(hào);ym為輸出信號(hào)。
參考模型傳遞函數(shù)為:
Gm(s)=hT(sI-Am)-1bm=kmNm(s)/Dm(s)
(11)
式中:km為參考模型增益。
設(shè)廣義輸出誤差函數(shù)為:
e(t)=ym(t)-yp(t)
根據(jù)李雅普諾夫穩(wěn)定性理論[8]設(shè)計(jì)自適應(yīng)控制律(不含誤差倒數(shù)),使廣義輸出誤差函數(shù)滿足以下條件:
(12)
當(dāng)式(12)成立時(shí),控制系統(tǒng)具備良好的跟蹤性能,達(dá)到了設(shè)計(jì)要求。
當(dāng)自適應(yīng)控制器中的可調(diào)參數(shù)足夠多時(shí),可以實(shí)現(xiàn)參考模型與可調(diào)系統(tǒng)的完全匹配。當(dāng)控制對(duì)象傳遞函數(shù)中的分子為m階、分母為n階、被控對(duì)象增益為kp時(shí),可調(diào)參數(shù)數(shù)量可多達(dá)(n+m+1)個(gè),因此與之對(duì)應(yīng)的自適應(yīng)機(jī)構(gòu)也應(yīng)為(n+m+1)個(gè)。
因此,自適應(yīng)控制器可設(shè)計(jì)如下。
①選擇L(s)=s+a(a>0),使得L(s)G(s)為嚴(yán)格正實(shí)函數(shù)。
②選擇Df(s)=L(s)Nm(s),并構(gòu)造輔助信號(hào)狀態(tài)方程:
③可調(diào)參數(shù)自適應(yīng)律為:

(13)

(14)
式中:θT=[k0c d0d];φT=[yrv1ypv2];e(t)=ym(t)-yp(t);Γ為正定對(duì)稱矩陣。
④設(shè)計(jì)非線性自適應(yīng)控制律為:
u(t)=θT(t)φ(t)+e(t)ζT(t)Γζ(t)
3 Narendra自適應(yīng)控制器的實(shí)現(xiàn)
通過分析Narendra模型參考自適應(yīng)控制理論,依據(jù)參考模型傳遞函數(shù),并選用穩(wěn)定多項(xiàng)式L(s)=s+a,可證明函數(shù)L(s)Gm(s)為嚴(yán)格正實(shí)函數(shù)。
定義增廣狀態(tài)向量為:
(15)
由式(15)可知:ζ1=yr/(s+a);ζ2=v1/(s+a);ζ3=yp/(s+a);ζ4=v2/(s+a)。
為使得被控系統(tǒng)的輸出信號(hào)與參考模型一致,設(shè)計(jì)可調(diào)參數(shù)向量θ為:
θT=[k0cd0d]
選擇信號(hào)濾波器:
Df(s)=L(s)Nm(s)=(s+a)×(s+1)
(16)
由式(16)獲得濾波信號(hào):
v1=u/(s+a)
v2=yp/(s+a)
選擇自適應(yīng)控制律:

(17)
由式(17)可得:
根據(jù)式(17)和式(15),得到控制律為[9]:

4 仿真設(shè)計(jì)
被控對(duì)象的數(shù)學(xué)模型為:
Gp(s)=1.853/s2
(18)
根據(jù)被控對(duì)象選擇的參考模型為:
(19)
構(gòu)建的Narendra模型參考自適應(yīng)控制系統(tǒng)模型如圖2所示。在圖2中,輸入系統(tǒng)的數(shù)學(xué)模型、參考模型,并進(jìn)行仿真操作。

圖2 Narendra自適應(yīng)控制系統(tǒng)模型示意圖
①在階躍信號(hào)的作用下,PID控制的動(dòng)態(tài)響應(yīng)曲線如圖3所示。根據(jù)圖3分析可知,PID存在較大的超調(diào)量,調(diào)節(jié)時(shí)間較長(zhǎng),并且在一段時(shí)間之后出現(xiàn)震動(dòng),系統(tǒng)趨于穩(wěn)定,控制性能良好。
②在階躍信號(hào)作用下,根軌跡控制的動(dòng)態(tài)響應(yīng)曲線如圖4所示。根據(jù)圖4分析可知,根軌跡控制存在較大的超調(diào)量,調(diào)節(jié)時(shí)間較長(zhǎng),穩(wěn)定后存在穩(wěn)態(tài)誤差,控制性能一般。
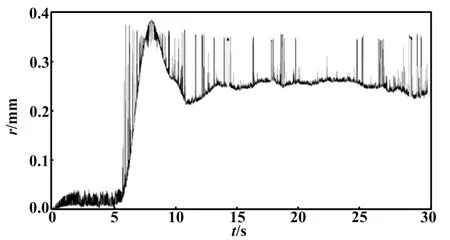
圖4 根軌跡控制的動(dòng)態(tài)響應(yīng)曲線
③在階躍信號(hào)作用下,自適應(yīng)控制的動(dòng)態(tài)響應(yīng)曲線如圖5所示。根據(jù)圖5分析可知,自適應(yīng)控制具有非常好的控制性能。根據(jù)參考模型的變化,控制器可以較快地跟隨參考模型進(jìn)行變化。其超調(diào)量較小,調(diào)節(jié)時(shí)間較短,控制效果優(yōu)于PID控制和根軌跡控制。
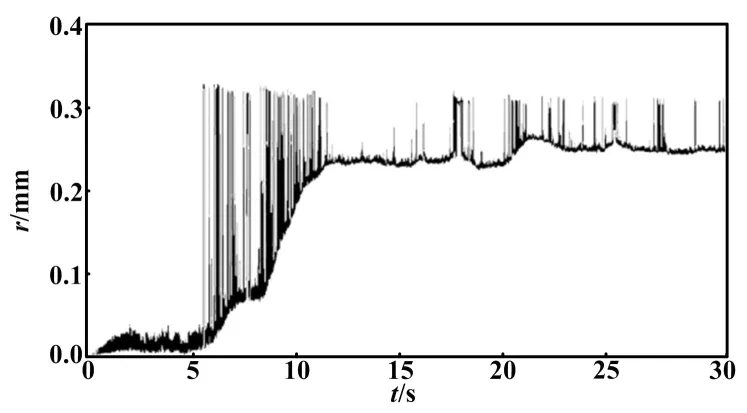
圖5 自適應(yīng)控制的動(dòng)態(tài)響應(yīng)曲線
5 結(jié)束語
對(duì)自適應(yīng)控制方法在球桿系統(tǒng)上的應(yīng)用進(jìn)行研究,建立球桿系統(tǒng)的數(shù)學(xué)模型,選擇Narendra控制器。在Simulink中,選擇多種控制算法,包括PID控制[10-11]、根軌跡控制和自適應(yīng)控制[12-13],對(duì)球桿系統(tǒng)進(jìn)行實(shí)時(shí)控制。由實(shí)時(shí)控制的結(jié)果分析可知,在采用了Narendra自適應(yīng)控制器后,球桿系統(tǒng)達(dá)到了較好的控制效果。在輸入信號(hào)變化的過程中,控制系統(tǒng)都可以保持良好的跟蹤性能。
[1] 彭秀艷,宮彬.球桿系統(tǒng)的控制方法研究[J].應(yīng)用科技,2009,32(12):37-40.
[2] 劉陽,萬隆君,徐軼群.淺談球桿系統(tǒng)的建模與仿真[J].中國(guó)科技信息,2014 (6);159-161.
[3] 吳偏偏,王富東,王敬馳.球桿控制系統(tǒng)的設(shè)計(jì)[J].行業(yè)應(yīng)用與交流,2015,34(9):114-116.
[4] 宋志偉,翟文鵬,信建峰,等.基于PID算法的球桿教學(xué)系統(tǒng)設(shè)計(jì)[J].硅谷,2015 (3):5-6.
[5] 李志民,柳強(qiáng),張新權(quán),等.基于最小二乘法的球桿系統(tǒng)輸入輸出建模研究[J].研究與開發(fā),2016,35(1):65-69.
[6] 鄭艷偉,張井崗.球桿系統(tǒng)的滑模變結(jié)構(gòu)控制[J].太原科技大學(xué)學(xué)報(bào),2014,35(2):97-101.
[7] 樓旭陽.基于球桿系統(tǒng)的現(xiàn)代控制理論課堂教學(xué)實(shí)例設(shè)計(jì)[J].高教學(xué)刊,2016 (8):78-80.
[8] 白珍龍,劉川來.應(yīng)用Lyapunov理論設(shè)計(jì)分?jǐn)?shù)階模型參考自適應(yīng)控制律[J].石油化工自動(dòng)化,2015,51(5):44-47.
[9] 龐中華,崔紅.系統(tǒng)辨識(shí)與自適應(yīng)控制MATLAB仿真[M].北京:北京航空航天大學(xué)出版社,2009:82-83,87.
[10]俞同云.基于閉環(huán)特征參數(shù)的球桿系統(tǒng)自適應(yīng)PID控制策略[D].長(zhǎng)沙:中南大學(xué),2013.
[11]KRISHNA B,GANGOPADHYAY S,GEORGE J.Design and simulation of gain scheduling PID controller for ball and beam system[D].Signal Processing and Electronics Engineering,2012:199-203.
[12]李寧,袁惠群,孫海義,等.Adaptive control of bifurcation and chaos in a time-delayed system[J].Chinese Physics B,2013,22(3):030508.
[13]劉幸,劉瀟.自適應(yīng)控制系統(tǒng)的發(fā)展與應(yīng)用[J].學(xué)術(shù)研究,2011:61-63.
Research on the Application of Narendra Adaptive Controller in Ball-Beam System
GAO Cheng,HAO Yangyang
(College of Chemical Process Automation,Shenyang University of Technology,Liaoyang 111003,China)
As one of the classic experimental equipment,the ball-beam system features open loop instability and nonlinearity,and it is a typical object in research of control theory.It is the commonly used device in automatic control laboratory,and the platform for testers practicing theoretical basis,also it is the typical device for designers verifying their new concept and new ideas.The ball-beam system and its mathematic model are established,and some of the sections are processed for linearity,thus the simplified model of the whole ball-beam system is obtained,and used as the transform function of the controlled object.In accordance with the features of the transfer function of ball-beam system,the Narendra adaptive controller is designed,and the control effects of the controller are verified by conducting real time control in Matlab/Simulink environment.The results of simulation and tests all indicate that,comparing with PID control and root locus control,the adaptive control has excellent control effects.The generation of the adaptive control theory has opened up a new way for solving the problem of complex system control,and become the hotspot in the fields of research and development.
Control theory; Adaptive controller; Filter; Servo motor; Motor drive
遼寧省自然科學(xué)基金資助項(xiàng)目(2015020103)
高成(1970—),男,博士,副教授,主要從事智能控制、機(jī)器人方向的研究。E-mail:gc_7011@163.com。
TH7;TP273+.2
A
10.16086/j.cnki.issn1000-0380.201704005
修改稿收到日期:2017-01-17
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
