淺析PSM短波發射機數字調制器綜合算法板
2017-04-15 17:04:07蔚長征
數字技術與應用 2016年12期
關鍵詞:發射機
蔚長征
摘要:本文簡單介紹應用DMR2000數字調制器對TBH-522型PSM150KW短波發射機調制控制器的升級改造,主要介紹DMR2000數字調制器中的綜合算法板。對綜合算法板中的音頻采樣率、基帶調制、功率控制功能和工頻噪聲補償等功能進行簡單介紹,重點分析分段式數字預失真處理技術和△—PWM技術。簡單說明操作和維護方法。
關鍵詞:調制器 綜合算法 發射機
中圖分類號:TN838 文獻標識碼:A 文章編號:1007-9416(2016)12-0135-02
1 調制控制器的升級改造的意義
TBH-522型150KW短波發射機低周采用的是脈沖階梯調制(PSM),是上世紀80年代開發的調制技術,在世界范圍內的到廣泛應用,使發射機的效率和可靠性的到了提高。PSM調制器主要由“階梯放大器”和“調制控制器”兩部分組成。是把階梯電壓的直流分量轉化為高頻載波功率,音頻分量轉化為高頻邊帶功率,將主整和調幅器合二為一,提供階梯電壓的裝置。數字調制器的使用使PSM調制器實現了數字化,改善了發射機電聲指標,提高了我臺發射機廣播覆蓋及實驗任務的發射效果,滿足了優質播出的要求。
2 系統結構組成
DMR2000數字調制控制器主要由:電源板、控制接口板、音頻轉換板、綜合算法板、調制接口板、光發光收板。數字調制控制器主從(MAST-SLAVE)式異步并線結構,MAST端由綜合算法板上的DSP控制,其他板卡處于總線的SLAVE端。
綜合算法板作為數字調制器的核心處理單元,可用于調節發射機電聲指標和簾柵的起步電壓及簾柵電壓的放大倍數,設置浮動載波以及音頻加功率輸入幅度和簾柵模塊正常工作指示。
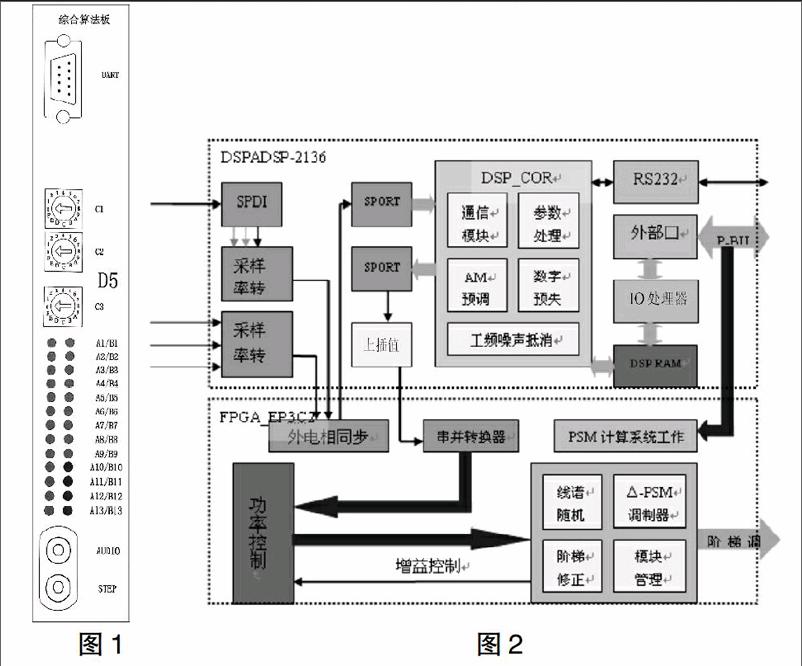
3 綜合算法板的面板功能(見圖1)
UART與電腦端連接,用于調節信噪比、失真、頻響指示的補償參數,讀取模塊狀態等。
C1、C2、C3為機械編碼器,C1是調節簾柵的起步電壓,C2簾柵電壓,C3是設置浮動載波(C1、C2必須在發射機未加高壓的情況下調節)。
A1指示燈FPGA程序加載完畢。
A2-A8指示燈為音頻加功率輸入幅度指示,隨著音頻幅度以及功率增加指示燈由A8開始向上逐一亮起。(A10、A11,B10、B11,B1-B8暫未使用)。
A12、A13為兩個簾柵模塊工作正常指示(兩個綠燈亮為工作正常),B12、B13為兩個簾柵模塊故障指示(紅燈亮為簾柵模塊故障)。
AUDIO為PSM音頻信號輸入、STEP為PSM階梯信號輸出。
4 綜合算法板的功能(見圖2)
綜合算法板主要包括音頻采樣率轉換、音頻信號的基帶調制、△—PWM、功率控制、自動增益控制、簾柵控制、指標補償等功能。
4.1 音頻采樣率轉換
系統利用ADSP—21369系統內部集成的兩個異步采樣率轉換器,將PSM調制器量化噪聲能量調制到PSM解調器通頻帶外,取得較高的音頻信號采樣率。對外部解碼設備的PCM音頻信號進行采樣率轉換,將采樣率統一到同一頻率送DSP處理。DSP根據固定的碼率進行基帶調制計算。
4.2 數字預失真的處理
發射機低周系統的信號失真隨著頻率的升高,失真嚴重,正負峰不對稱。調制器改造前,抑制輸出失真的采用了兩個辦法:
(1)對簾柵電源兩個功率模塊采用了PDM脈沖的控制方式,改善失真。(2)在音頻通路板中加入70KHZ的三角波信號,使得輸入音頻信號頻率的升高,形成PDM的補償脈沖也相應增加,音頻信號無論頻率高低,失真保持不變。
數字調制器采用分段式數字預失真補償的方法來改善發射機輸出失真,數字預失真處理系統可以有效改善發射機系統的非線性失真,并且優于模擬系統。但是局限性是只是針對低周系統所做的預失真補償,不能校正高末級處于一定程度的失諧時,所產生的諧波失真。
4.3 音頻信號的基帶調制
基帶調制主要完成AM預調制和浮動載波控制。
(1)AM預調制:進行固定載波的AM預調制,在音頻信號上疊加直流分量。得到信號表達式:
X[i]=A(1+mx(i))
其中A是調制信號的幅度,X(i)是音頻信號,m是調幅度。當AM預調制信號X[i]經階梯放大后送往調制級后,被高末級電子管整體調制載頻上去,直流分量即成為載波分量,音頻分量即成為包絡信號,這里叫AM預調制。
(2)浮動載波控制仍沿用PSM調制器的控制方法,輸出載波電平根據調幅度的大小作上下波動,地調幅輸出電壓較小,高調幅輸出電壓大。浮動載波的功能是在不影響收聽效果的前提下節約電能。
4.4 △—PWM調制
“△—PWM調制”技術是△-∑(Sigma Delta)調制技術與PWM(Pulse Width Modulation)調制技術的結合。
△-PWM調制算法,設計思路來源于多比特△-∑調制器的結構,根據輸入信號與輸出信號(輸出信號指的是算法對階梯放大器實際輸出信號的模擬)之間的誤差進行單比特的PWM調制。
利用了△-∑調制反饋思想和PWM調制的簡單性和穩定性。既解決了多比特△-∑調制器系統不穩定問題,又對階梯放大器的非思想特性進行“階梯修正技術”,在很大程度上抑制了PSM發射機固有的循環噪聲。
利用“過抽樣”和“噪聲整形”技術將階梯放大器的量化噪聲調制到音頻帶外高頻端,以利用解調濾波器加以濾除。
利用數字積分器的環路反饋的修正效果,來改善階梯放大器的非理想特性。
4.5 功率控制
包括功率模式選擇,功率升降控制、削波處理、及功率封鎖。發射機功率模塊已全部采用數字模塊,可對發射機輸出功率大小進行控制,在發射機出現故障時自動轉換到低功率工作狀態,直至封鎖全部輸出功率。 當功率模塊不工作達到一定數量時,可以自動降低輸出功率寄存器的功率值來保證輸出波形出現切頂失真。
4.6 自動增益控制
調制器電壓和簾柵電壓的輸出都根據功率實測的輸出電壓進行增益控制。 解決機房供電輸出電壓隨著發射機的運行數量的變化,產生較大波動的問題。保護了電子管、真空電容等大型真空器件,保證了發射機輸出功率穩定。
4.7 簾柵控制
高末簾柵級電壓隨著功率的變化而變化,音頻信號的低頻分量參與了簾柵統調,以降低發射機的低頻失真。
4.8 指標補償
(1)循環噪聲:由輸入與輸出之間的誤差信號來驅動調制器功率模塊的開關,最終使調制器的輸出與輸入信號達到最小的誤差。使用信號差分器計算輸入信號與 PSM 調制器輸出信號之間的誤差; PSM合成器根據目前功率模塊的使用情況來估計PSM 調制器的輸出。模塊電壓查找表存儲歸一化的功率模塊輸出電壓;模塊地址管理器:模塊的循環使用,動態的實現功率模地址的插入和刪除以及功率模塊電壓的刷新;PDM調制器根據誤差信號生成功率模塊開關控制信號。
(2)電源工頻噪聲的補償:進行預補償可抵消功率模塊輸出含300HZ及諧波成分;交流燈絲產生的100HZ 及諧波分量;低調制控制器采用模擬信號源時,橋式整流殘存的100KHZ噪聲及諧波分量。
4.9 系統操作及總線維護
通過板上的機械編碼器和撥碼開關對系統進行設置。
通過串行通信接口進行補償參數的調整,查看系統設置及功率模塊的正常電壓和過壓、過流保護等狀態。
ADSP—21369占用總線的主控端,可以訪問和控制總線上掛載的所有設備。但是發射機的保護系統是獨立于總線管理之外的,有最高操作權限。
綜合算法板完成了數字調制器信號的主要功能,其他板塊只是提供外圍功能接口,簡化了電路設計,節約了板卡的使用數量,降低了維護人員的維護量。綜合算法板使用處理芯片的資源還不到20%,系統還具有很高的研發空間。
猜你喜歡
消費導刊(2018年10期)2018-08-20 02:56:28
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年12期)2018-08-01 00:48:02
消費導刊(2018年8期)2018-05-25 13:19:37
電子測試(2017年11期)2017-12-15 08:57:48
現代工業經濟和信息化(2016年22期)2016-08-23 11:55:40
西部廣播電視(2015年9期)2016-01-18 03:46:07
西部廣播電視(2015年8期)2016-01-16 03:45:32
西部廣播電視(2015年7期)2016-01-16 03:45:20
西部廣播電視(2015年3期)2016-01-15 02:05:45
