永磁同步電機伺服驅(qū)動系統(tǒng)實驗平臺設(shè)計
2017-04-08 16:14:24沈震張成德劉巧棣
數(shù)字技術(shù)與應(yīng)用 2017年2期
關(guān)鍵詞:永磁同步電機
沈震++張成德++劉巧棣
摘要:近些年來,交流伺服系統(tǒng)在工控、軍工、民用、醫(yī)療等領(lǐng)域的應(yīng)用十分廣泛。對于永磁同步電機伺服系統(tǒng),除了要求具有動態(tài)響應(yīng)迅速、穩(wěn)態(tài)運行可靠的特性外,還要求系統(tǒng)能夠?qū)崿F(xiàn)準(zhǔn)確定位和快速跟蹤。本文從硬件設(shè)計和軟件設(shè)計兩部分分析永磁同步電機伺服驅(qū)動系統(tǒng)的具體實現(xiàn)方案,結(jié)合永磁同步電機伺服驅(qū)動系統(tǒng)硬件實驗平臺開發(fā)了電機驅(qū)動系統(tǒng)測試軟件,并進行了電機驅(qū)動控制系統(tǒng)的調(diào)試實驗。
關(guān)鍵詞:永磁同步電機;DSP芯片;實驗驗證
中圖分類號:TM351 文獻標(biāo)識碼:A 文章編號:1007-9416(2017)02-0016-01
1 引言
近些年來,交流伺服系統(tǒng)在工控、軍工、民用、醫(yī)療等領(lǐng)域的應(yīng)用十分廣泛。對于永磁同步電機伺服系統(tǒng),除了要求具有動態(tài)響應(yīng)迅速、穩(wěn)態(tài)運行可靠的特性外,還要求系統(tǒng)能夠?qū)崿F(xiàn)準(zhǔn)確定位和快速跟蹤。本文結(jié)合永磁同步電機伺服驅(qū)動系統(tǒng)實驗平臺開發(fā)設(shè)計,將模糊控制和傳統(tǒng)PID控制相結(jié)合,使系統(tǒng)既具有模糊控制靈活而適應(yīng)性強的優(yōu)點,又具有PI控制精度高的特點。
2 實驗平臺硬件設(shè)計
永磁同步電機驅(qū)動控制系統(tǒng)實驗平臺硬件由驅(qū)動電源電壓的整流和逆變模塊、反饋信號(位置、電流)檢測模塊以及相應(yīng)的硬件保護等模塊組成。本設(shè)計采用的DSP芯片為TI公司的TMS320F28335,這是一款浮點類型的處理器,主頻高能高效率運行負載控制算法,尤其是矢量控制算法以及高頻率電流環(huán)處理的采集運算,大量傳感器模擬和數(shù)字信號濾波計算等實時控制。
2.1 主電路
主電路是驅(qū)動系統(tǒng)能量轉(zhuǎn)換的通路,用來將電能直接轉(zhuǎn)化為驅(qū)動伺服電機轉(zhuǎn)動轉(zhuǎn)矩的機械能。采用交流直流交流方式將電能轉(zhuǎn)化的結(jié)構(gòu)方式,對三相220V交流供電進行全橋不可控整流。逆變部分采用IPM智能功率模塊,將母線直流電轉(zhuǎn)化為交流電,其IPM內(nèi)部集成了IGBT驅(qū)動電路,性能穩(wěn)定,避免在外部搭建PWM驅(qū)動電路而造成的控制系統(tǒng)繁瑣,縮短了PWM信號在PCB板上的走線長度,避免了周邊電路帶來的干擾。在由DSP發(fā)出的SVPWM信號采用光耦隔離后由系統(tǒng)提供的驅(qū)動DC15V電源直接驅(qū)動IPM。根據(jù)系統(tǒng)功率要求,考慮了系統(tǒng)的布局和干擾條件,本設(shè)計采用了Agilentg公司生產(chǎn)的光耦HCPL3120,具有500ns的開關(guān)時間和15KV的絕緣耐壓等優(yōu)良特點,在IGBT驅(qū)動中具有廣泛的應(yīng)用,其性能滿足系統(tǒng)的要求。
2.2 控制電源電路
一般情況下,控制電源單獨工作時,其輸出電壓紋波大小均可以滿足控制系統(tǒng)要求,但控制電源帶上負載后,在電源輸出電壓上會疊加上較高的紋波電壓,如輸出紋波太大,會影響到控制電路和檢測電路工作的可靠性。因此,合理配置和設(shè)計穩(wěn)定的開關(guān)電源對整個系統(tǒng)的實現(xiàn)至關(guān)重要。針對控制電源穩(wěn)定性的需求,本設(shè)計采用了PI公司生產(chǎn)的三端離線PWM復(fù)合開關(guān)TOPSwitch以及光耦和基準(zhǔn)源組成的反激式開關(guān)電源,輸入額定電壓為220V,經(jīng)過反饋及鉗位電路分別得到5V,-5V及15V的控制電源。采用5V電源為控制基準(zhǔn)反饋回路。
2.3 轉(zhuǎn)子位置、角速度檢測電路
電機轉(zhuǎn)子外側(cè)安裝有位置傳感器,通常選用正交式光電編碼器。其利用光電元件制作的精密光柵器件檢測光學(xué)信號,在經(jīng)過換算和信號處理輸出具有ABI三種信號的正交編碼信號。輸出的信號能夠直接連接到DSP的碼盤檢測接口,DSP通過內(nèi)置的接口采集到高速的盤脈沖信號進行處理,用于完成矢量控制和位置環(huán)的伺服控制。
2.4 電流檢測電路
矢量控制依賴于準(zhǔn)確的電流采樣信號,其信號的波動干擾都會直接造成系統(tǒng)控制偏差和控制性能下降,直接影響整個電流環(huán)的控制以及系統(tǒng)的穩(wěn)定。因此我們需要選用的霍爾電流傳感器應(yīng)該滿足高采樣精度和低溫漂的要求。本設(shè)計選用了ALLegro公司生產(chǎn)的ACS712ELC系列的電流傳感器。該傳感器具有2.1 kVRMS電壓絕緣及低電阻電流導(dǎo)體的全集成、極穩(wěn)定的輸出偏置電壓和近零的磁滯。同時在DSP中的12位轉(zhuǎn)換器模塊提供了高效的采集頻率對電流信號進行采集和反饋控制,可以滿足對系統(tǒng)的控制精度和穩(wěn)定性的要求。
3 實驗平臺軟件設(shè)計
DSP作為系統(tǒng)軟件算法實現(xiàn)的載體,軟件實現(xiàn)的功能主要有:矢量控制算法、PID調(diào)節(jié)器算法、伺服驅(qū)動的電流環(huán)、速度環(huán)、位置環(huán)算法的實現(xiàn),模糊控制器算法實現(xiàn)。本設(shè)計伺服電機數(shù)字控制系統(tǒng)軟件采用模塊化設(shè)計。
3.1 系統(tǒng)模塊
系統(tǒng)模塊是系統(tǒng)初始化的過程。主要包括兩個模塊:系統(tǒng)初始化和中斷配置。系統(tǒng)初始化主要包括:配置系統(tǒng)時鐘、IO接口初始化、通訊模塊的初始化、模擬量接口的初始化、在ROM中設(shè)置用戶參數(shù)與電機參數(shù)的配置。
3.2 電機控制模塊
電機控制模塊主要由DSP完成。其主要包括兩個部分:矢量控制模塊和SVPWM產(chǎn)生模塊。矢量控制算法是永磁同步電機伺服驅(qū)動控制的基礎(chǔ),算法的實現(xiàn)需要實時對電流信號解耦運算,每個控制周期都有需要運算的程序,因此可以利用DSP對數(shù)字信號的高速處理的能力來解決大量運算的工作。
3.3 外部接口模塊
外部接口模塊實現(xiàn)對DSP內(nèi)部控制算法和片外系統(tǒng)的信息交互接口。有控制算法需要的實時電機電流和碼盤位置信號和用于存儲信息的ROM之間的SCI通訊裝置接口。控制器運行狀態(tài)信息的反饋,包括通過IO接口采集進入DSP內(nèi)部的數(shù)字量信號和驅(qū)動器散熱系統(tǒng)溫度信號的處理。
3.4 通訊模塊
通訊模塊是實現(xiàn)上位機和驅(qū)動器控制本身信息交互的功能。DSP集成了CAN2.0B的標(biāo)準(zhǔn)通訊協(xié)議,供用戶在此物理層的基礎(chǔ)上進行應(yīng)用層協(xié)議的開發(fā)。應(yīng)用該協(xié)議上位機能夠?qū)崿F(xiàn)對一臺或多臺驅(qū)動器組成主從結(jié)構(gòu)的網(wǎng)絡(luò)控制,其傳輸速度能滿足上位機對系統(tǒng)及網(wǎng)絡(luò)控制的實時性要求。
4 實驗驗證
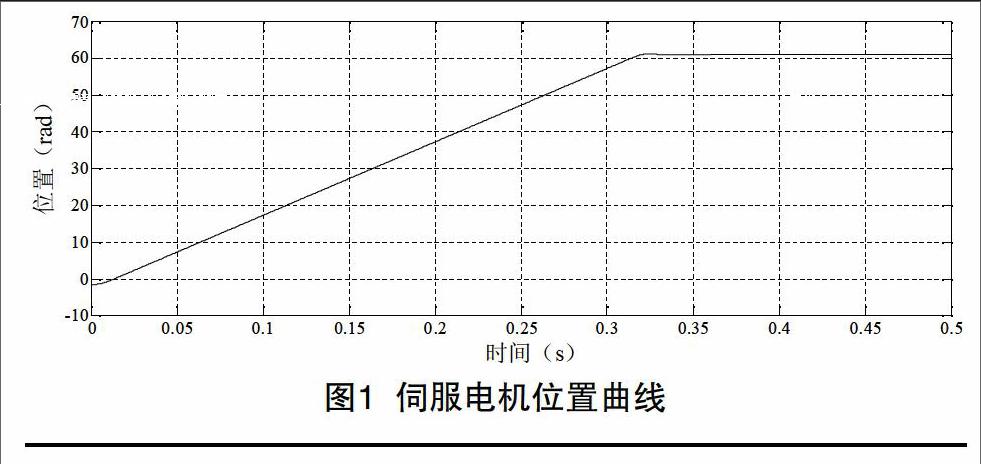
矢量控制系統(tǒng)是一個復(fù)雜的閉環(huán)控制系統(tǒng),其中包含有速度和電流兩個閉環(huán)結(jié)構(gòu),有多個PI調(diào)節(jié)器需要進行參數(shù)整合,因此一次性將整個系統(tǒng)搭建并調(diào)試的方案不具有可行性。電流環(huán)的參數(shù)主要取決于電機的電氣特性,因此要先進行電流環(huán)參數(shù)調(diào)整,當(dāng)電流環(huán)穩(wěn)定后在進行速度環(huán)和位置環(huán)調(diào)試。系統(tǒng)實驗位置曲線如圖1所示。
5 結(jié)語
本文通過分析交流永磁同步電機驅(qū)動控制系統(tǒng)硬件、軟件相關(guān)模塊的設(shè)計,構(gòu)建了交流永磁同步電機伺服驅(qū)動控制系統(tǒng)。采用分級調(diào)試思想,調(diào)試了系統(tǒng)開環(huán)、電流環(huán)以及速度環(huán),驗證了電機驅(qū)動系統(tǒng)的電流環(huán)與速度環(huán)驅(qū)動控制可行性;最后在實際作業(yè)環(huán)境下測試了位置環(huán),驗證了模糊算法并給出了相關(guān)調(diào)試曲線,說明模糊自適應(yīng)PID在位置環(huán)中的應(yīng)用具有改善控制性能的作用,且驅(qū)動系統(tǒng)滿足系統(tǒng)控制精度要求。
參考文獻
[1]霍中良,王興松.基于模糊PID的伺服壓力機位置控制系統(tǒng)[J].鍛壓技術(shù),2011,36(5):93-96.
[2]DQ Truong, KK Ahn. Force control for press machines using an online smart tuning fuzzy PID based on a robust extended Kalman filter[J].Expert Systems with Applications, 2011,38(5):5879—5894.
[3]夏乃欽,彭繼慎,劉鑒.基于IPM的永磁同步電機伺服驅(qū)動控制的研究[J].微計算機信息,2011,27(05):50-53.
猜你喜歡
現(xiàn)代電子技術(shù)(2017年1期)2017-02-16 11:49:32
汽車工程學(xué)報(2016年5期)2017-01-16 02:42:50
計算技術(shù)與自動化(2016年4期)2017-01-11 14:06:23
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(shù)(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(shù)(2016年2期)2016-03-22 22:21:46
電腦知識與技術(shù)(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學(xué)學(xué)報(2015年6期)2016-02-18 00:26:49
