大型風力發電機組變槳距控制技術研究
2017-03-30 19:01:39程申高桂革曾憲文
科技與創新 2016年22期
程申+高桂革+曾憲文

摘 要:由于風速的隨機性、時變性和風力發電系統的非線性等特點,根據對風速特性、槳葉空氣動力學理論的分析,提出了基于前饋補償的獨立變槳距控制策略,分別采用方位角和加速度權系數分配對各個槳葉單獨進行控制,然后根據前饋補償理論分別對2種控制方法進行補償。通過建模仿真和比較2種方法,結果表明:2種控制策略都能在穩定輸出功率的同時降低槳葉的拍打振蕩和不平衡載荷,減輕風機的疲勞載荷。前者簡單易行、成本低,具有很好的工程應用價值;后者對風速應對能力更強,響應速度更快。
關鍵詞:獨立變槳距控制;前饋補償;方位角權系數;加速度權系數
中圖分類號:TM315 文獻標識碼:A DOI:10.15913/j.cnki.kjycx.2016.22.014
隨著風電機組單機容量的不斷增大,變槳距控制技術已成為風力發電的一項關鍵技術。變槳距控制通常又分為統一變槳距控制和獨立變槳距控制2種方法。獨立變槳距根據槳葉所受風速或受力的不同來調節每個槳葉的槳距角,不僅能夠穩定風機的輸出功率,還能夠降低槳葉的拍打振蕩,改善風輪載荷不均勻情況,降低機組的疲勞應力,延長風機的壽命。
本文分析了風速特性、空氣動力學理論,提出了基于前饋補償理論的獨立變槳距控制方法,通過仿真分析,結果表明:使用此獨立變槳控制策略不但能夠使風機的輸出功率穩定在額定功率附近,而且能夠降低機組載荷,減小槳葉振蕩。
1 獨立變槳距控制基本原理
1.1 風速特性
風切變效應是指當風速穩定時,隨著高度的增加風速會不斷增大。風切變效應公式為:
此外,槳葉的軸向氣動力是槳葉產生拍打振蕩的主要原因。
2 基于前饋補償的獨立變槳距控制策略
基于槳葉方位角信號和基于槳葉加速度信號是2種基礎的獨立變槳距控制方法。
2.1 基于方位角權系數分配的控制策略
基于方位角權系數分配的獨立變槳距控制策略是通過方位角傳感器來測量信號的控制方法。在正常工作時,槳葉的所處位置可以根據方位角θ來確定。權系數根據各槳葉受風的大小來分配。原則為:在穩定風機輸出功率的前提下得出統一變槳距相對應的值,再通過權系數對各個槳葉槳距角的變化量進行調整。受風越大,所對應的權系數就越大,而槳距角變化值也越大;反之,則越小。
獨立變槳距槳距角變化量調整的最大范圍為:
2.2 基于加速度權系數分配的控制策略
基于加速度權系數分配的獨立變槳距控制策略是利用加速度傳感器測量信號的控制方法,可以直接檢測風機槳葉受力狀況。根據各槳葉的受力情況分配相應的權系數,受力越大,分配的權系數就越大,槳距角的變化量也就越大;反之,則越小。權系數的分配方法和控制思路與基于方位角加速度權系數分配的獨立變槳控制策略類似,Ki為各槳葉對應的權系數,為加速度信號。
2.3 前饋補償控制
前饋補償的理論不但能夠抑制擾動所引起的靜態偏差和動態偏差,而且能夠被用于隨動系統給定信號之中,前饋補償的目標是加強系統的跟隨性能。其原理為:在已知外部作用的前提條件下,施加相反于外部作用的控制量,目的是不讓被控制量受到變化,即在控制量與外部作用的共同作用下降低偏差。
按照輸入補償的控制系統如圖1所示。
3 仿真結果分析
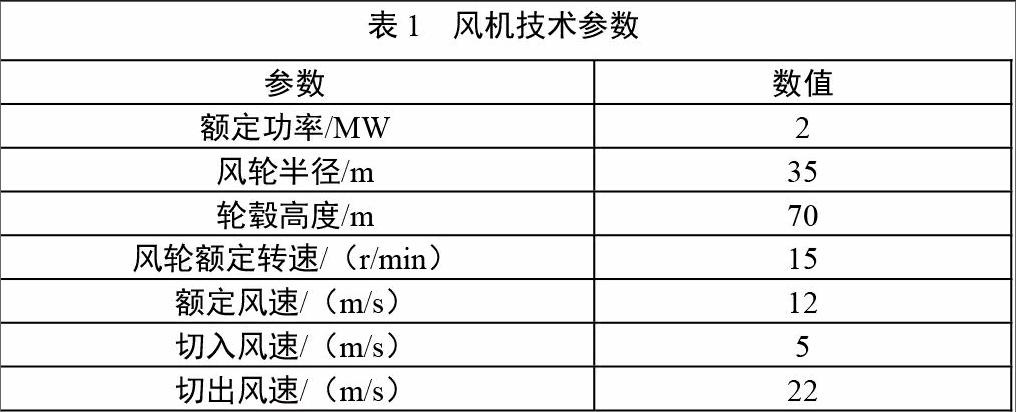
風機模型的參數使用2 MW風機的主要參數來仿真。主要參數如表1所示。3.1 仿真曲線分析
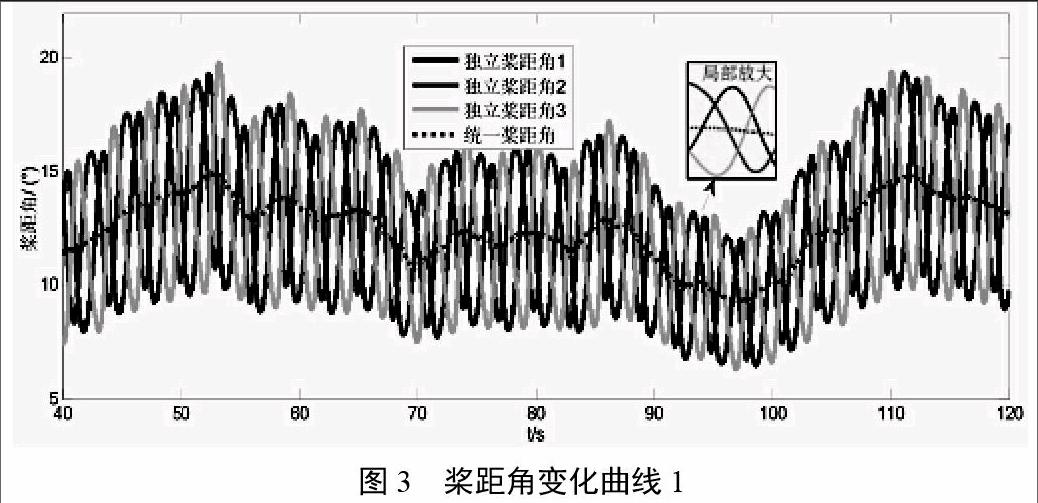
3.1.1 方位角權系數獨立變槳距控制仿真
圖3為在隨機風速下槳距角的變化曲線。由此可知,隨著風速的變化,獨立變槳距控制策略根據所測量槳葉方位角的變化來分配權系數,使得槳距角隨著風速的不斷變化而變化。
圖4為輸出功率的仿真。相對于統一變槳距控制,獨立變槳距控制輸出功率的幅值變化頻率與幅度更低,曲線更平滑,對于維持風力發電機組輸出功率有更好的穩定性。
3.1.2 加速度權系數獨立變槳距控制仿真
圖5為在隨機風速下槳距角的變化曲線。由圖5可以看出,隨著風速的變化,獨立變槳距控制策略根據所測量各槳葉加速度(受力)的變化來分配權系數,使得槳距角隨著風速的不斷變化而變化。
圖6為輸出功率曲線。由圖6可知,使用獨立變槳距控制的頻率和幅度更低,響應速度也更快,隨著時間的增加,控制器精度不斷提升,表現出更好的穩定性。
3.2 兩種控制策略比較
通過仿真得出結果,即2種獨立變槳距控制策略都具有良好的控制性能,在滿足輸出功率穩定性的同時實現各槳葉的平穩變化,能進一步減小槳葉的拍打振蕩,減輕風力發電機組疲勞載荷。但是,基于前饋補償的加速度權系數控制策略對于不斷變化的風速應對能力更強,相應速度更快。
作為權系數反饋量的方位角和加速度,其測量都需要用傳感器來實現。通常,風機上都會有測量槳葉方位角的轉速傳感器,易于裝配且成本不高;而加速度傳感器要在各個葉片多處安裝來保證其精確測量,致使其成本增大并且安裝較困難。從難度和成本上看,前者更為簡單實用。
從變槳距執行機構來看,基于方位角的控制策略更加依賴轉速的調節,有其固定的調槳幅度;基于加速度的控制策略由于還會受到湍流效應等因素的影響,使其變槳變化范圍與頻率更大,對其執行機構的要求會更高。
總之,基于前饋補償的加速度權系數控制策略的控制性能比基于前饋補償的方位角權系數控制策略會更好一些,對風速的應對能力相對更強,不過其要求更多、更精確的傳感器來保證精度,對變槳距執行機構的要求也更高。這樣成本就會很高。所以,在實際工程中2種控制策略的應用需要視情況具體分析。
4 結論
為了實現大型風力發電機組的獨立變槳距控制,使用方位角和加速度權系數兩種基礎的獨立變槳距控制方法對每個槳葉
槳距角進行控制。再根據前饋補償的控制原理,提出基于前饋補償的獨立變槳距控制方法。2種策略策略都具有更好的控制性能,在滿足輸出功率穩定性的同時實現各槳葉的平穩變化,能進一步減小槳葉的拍打振蕩,減輕風力發電機組疲勞載荷。基于前饋補償的加速度權系數控制策略對于不斷變化的風速應對能力更強,響應速度更快;基于前饋補償的方位角權系數控制策略控制方法簡單易行成本低,具有很好的工程應用價值。
參考文獻
[1]劉其輝,賀益康,趙仁德.變速恒頻風力發電系統最大風能追蹤控制[J].電力系統自動化,2013,27(20).
[2]李晶,宋家驊,王偉勝.大型變速恒頻風力發電機組建模與仿真[J].中國電機工程學報,2014,24(6).
[3]王志新.現代風力發電技術及工程應用[M].北京:電子工業出版社,2010.
[4]任麗娜,呂明月,劉爽爽.基于蜂群算法優化的變槳距自抗擾控制器[J].新型工業化,2014(06).
[5]Vapnik V.The nature of statistical learning theory.New York:Springer,1995.
[6]王欣,李勝剛,秦斌.基于模糊支持向量機的風電場功率預測[J].新型工業化,2014(09).
[7]姚興佳,張雅楠,郭慶鼎.大型風電機組三維模糊控制器設計與仿真[J].中國電機工程學報,2009,29(26).
[8]Kyoungsoo Ro,Hanho Choi.Application of neural network controller for maxilnum power extraction of a grid connected wind turbines system.Eleetrical Engineer,2005,88(12).
[9]Jianning Li,Hongye Su,Yibo Zhang.Chattering Free Sliding Mode Control for Uncertain Discrete Time-Delay Singular Systems.Asian Journal of Control,2013,15(1).
[10]廖勇,何金波,姚駿.基于變槳距和轉矩動態控制的直驅永磁同步風力發電機功率平滑控制[J].中國電機工程學報,2009,29(18).
〔編輯:劉曉芳〕