1P5R型管片拼裝機構分析及設計
2017-03-30 18:46:27莊欠偉楊正
筑路機械與施工機械化 2017年3期
莊欠偉+楊正

摘 要:以寧波軌道交通3號線一期工程的類矩形盾構機為依托,分析了類矩形管片拼裝的難點。利用機構學知識,綜合傳統圓形拼裝機構和該工程管片的特點,創新研發了一種1P5R串聯型拼裝機。結合對該拼裝機機構形式和結構原理的介紹,探討其特點及優勢:體積小,動作靈活,可以實現90°以上的姿態調整;既能夠完成類矩形圓周管片拼裝,又能完成大長度中立柱的拼裝。
關鍵詞:類矩形盾構機;1P5R型管片拼裝機;長度空間比;中立柱
中圖分類號:U455.43 文獻標志碼:B
文章編號:1000-033X(2017)03-0103-04
Abstract: Based on the rectangular shield machine for the first phase of Ningbo Rail Transit Line 3, the difficulties in assembling rectangular segments were analyzed. By using the knowledge of mechanism, traditional circular assembling mechanism and the characteristics of the segments, 1P5R, a tandem segment erector, was developed. The form and structural principle of the segment erector were introduced to discuss its characteristics and advantages: small volume, flexible movement, and is capable of making 90°of position adjustment. The segment erector applies to the assembly of both the rectangular-like pieces of circular tube and long columns.
Key words: rectangular shield machine; 1P5R segment erector; length-to-space ratio; center pillar
0 引 言
隨著城市現代化的推進,為了更合理地運用有限的地下空間,矩形或類矩形等異形斷面隧道被越來越多地應用到城市隧道工程中[1-5]。矩形斷面的隧道尺寸越做越大,施工距離越來越長[6-8]。當前市場上缺少矩形盾構機,投入到工程應用的矩形或類矩形隧道掘進機主要以頂管形式為主,不具備管片拼裝機等設備,管節跟隨掘進機體一同向前頂進,施工條件受到很大限制。而傳統圓形盾構所用的管片拼裝機受拼裝機械手活動范圍限制,無法直接應用在矩形等異形隧道掘進機上,因此對可用于矩形及其他異形斷面的管片拼裝機進行研究有重要的意義。
國內多家機構對盾構管片拼裝機進行了研究,提出了一些新的拼裝機構類型。如武漢大學喻萌、程燕采用虛擬樣機技術研究了回轉加擺臂式拼裝機[9-10];上海交通大學黃業平等人研究了基于3-RPS并聯構型的管片拼裝機構[11-12];錢曉剛研究了采用球面二自由度的空間五桿機構來實現拼裝自由度[13-14],為隧道管片拼裝技術提供了新的思路。
本文以應用于寧波市軌道交通3號線一期工程出入段線的類矩形盾構機為依托,對其管片拼裝機進行研究。受施工區域空間條件限制,項目采用類矩形斷面管片,中間設置立柱,兩側區域分別供2條軌道線路使用,管片外廓尺寸為11.50 m×6.94 m。
針對工程中所用的類矩形特殊斷面,項目借助工業機器人理念,綜合機械工程理論、數學方法、控制理論、電氣工程技術以及計算機軟件技術等[15-19],采用雙串聯機器臂式拼裝機構,達到六自由度管片拼裝功能,同時滿足特殊空間角落的拼裝能力。
1 類矩形管片特點
類矩形管片有如下特點。
(1)隧道斷面大。外廓尺寸寬11.50 m,高6.94 m。
(2)管片結構復雜。單環管片分為11片,中間設置立柱,立柱高度為5.22 m。
(3)錯縫拼裝。要求左右拼裝機均能完成各塊管片的拼裝。
管片斷面及分塊如圖1所示。
管片斷面為非圓形,內部用于管片拼裝的空間也為非圓環形;管片形狀為非統一圓弧,有單一圓弧,有兩段圓弧,中立柱管片為直線,拾取點處圓弧為非統一圓心;拾取點為非質心,機械手需要承擔較大力矩。管片長度空間比非常大,已超過0.8,且管片形狀為大長度直線管片,而拼裝空間近環形,管片無法在拼裝空間平面拼裝,常規圓形拼裝機長度空間比均為0.4左右,管片形狀與拼裝控制相似,無法完成本工程管片拼裝功能,需要突破傳統的拼裝思路。
2 傳統圓形拼裝機分析
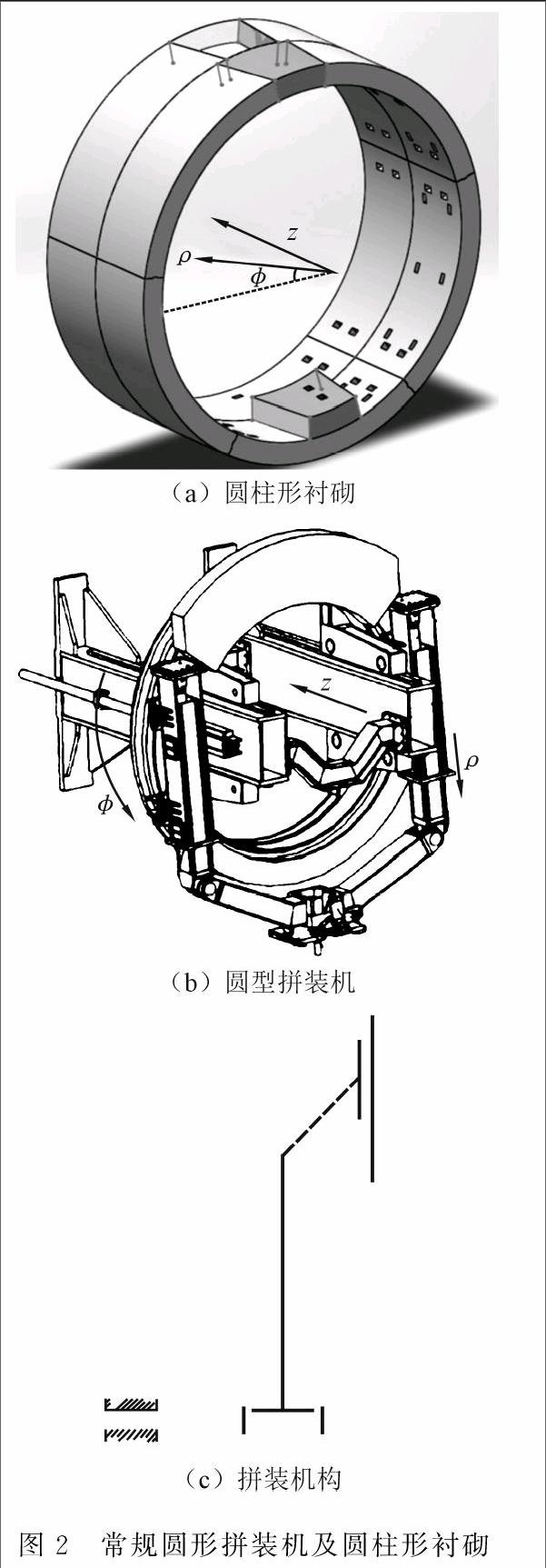
目前,圓形拼裝機將管片拼裝成一個圓柱形襯砌,如圖2 (a)所示,常規圓型拼裝機如圖2 (b)所示。拼裝機構簡圖如圖2(c)所示,位置控制機構為PRP結構形式。第一個運動副為沿Z軸移動的大平移機構,是一個冗余滑動副(P);第2個運動副為沿φ方向的旋轉機構,是一個旋轉副(R);第3個運動副為沿ρ方向移動的徑向移動機構,是一個冗余滑動副(P)。執行機構運動副與運動坐標系一致,結構簡單無需運動耦合。
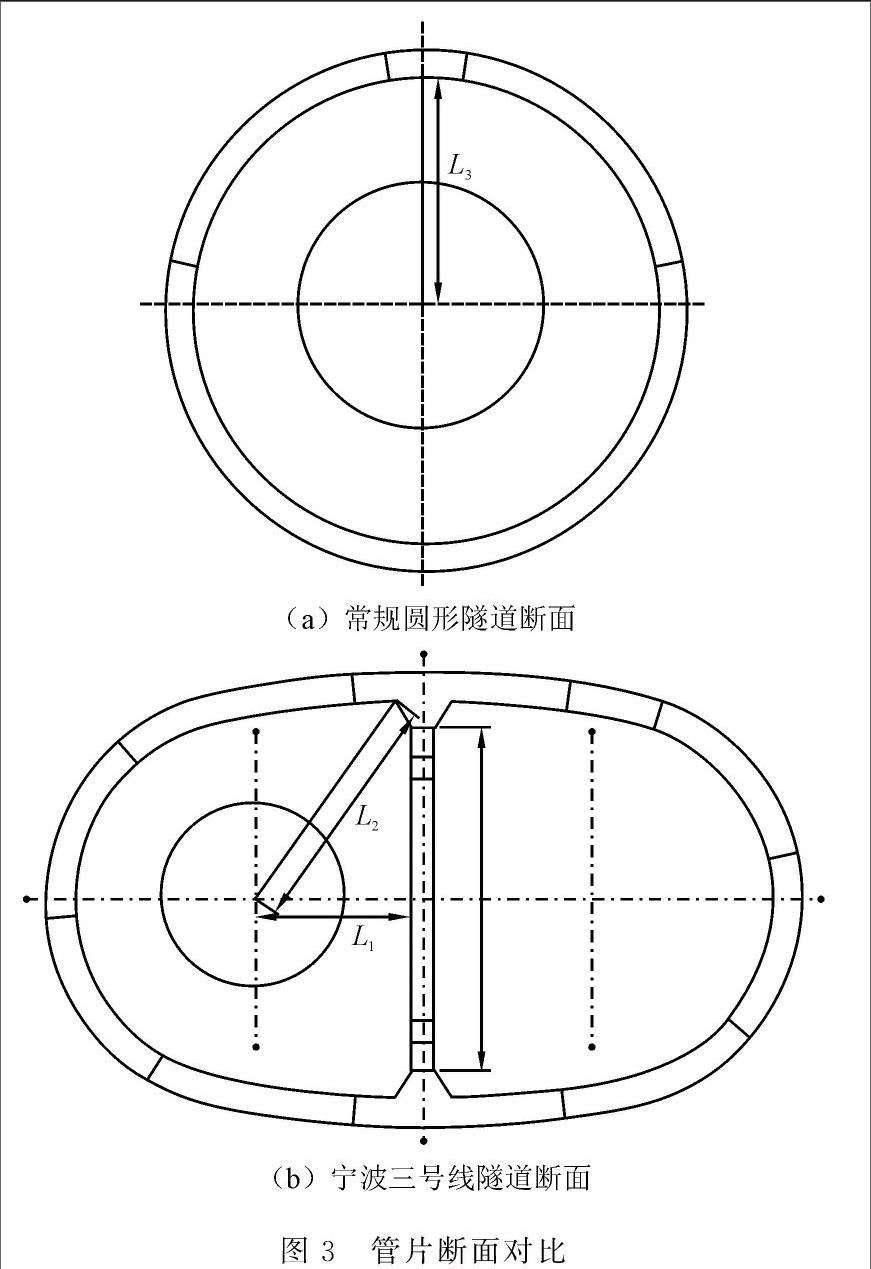
如圖3(a)所示,常規圓形隧道為不變半徑L3,通過PRP結構形式定位的拼裝機適合圓形斷面管片拼裝。目前,寧波三號線隧道斷面如圖3(b)所示,其內部空間為非圓形,長邊L2和短邊L1差值大。內部管片工作空間狹長,管片運動復雜,通過PRP結構形式定位的拼裝機基本無法拼裝;中立柱無法在拼裝空間平面內回轉,也難以完成拼裝,急需研發新型機構來完成這類情況下的管片拼裝。
3 1P5R拼裝機構設計
該類矩形管片形成的隧道是非圓斷面的柱狀體,可采用一個滑動機構實現柱狀體軸線方向運動。類矩形斷面內部空間不規則且狹長,RRR運動結構形式有3個回轉運動副串聯,可靈活控制管片平面位置點和位置平面姿態,有利于管片在狹窄空間完成拼裝。拼裝機的定位機構采用PRR定位機構加R姿態機構形式。
管片C1、C3、T2、T1的拼裝軸線不過拼裝圓心,其平面姿態調節范圍較大,對應立體坐標系繞Z1周旋轉的范圍大。類矩形管片中立柱縱向輸送到拼裝機拾取處,如圖4所示。中立柱拼裝目的處為圖4虛線處。PRR定位機構的拼裝只能將中立柱送達圖中所示位置,需管片位姿調整機構將其繞x1軸旋轉90°。繞Z1和x1軸旋轉角度均較大,常規的并聯三自由度機構已經無法實現這種大范圍的姿態調整,只能采取串聯型的機構。綜合以上情況,并考慮到管片姿態調整還需一個繞y1軸的微小姿態調整,該管片拼裝機采用串聯型的RRR結構形式,如圖5、6所示。因此,類矩形管片拼裝機的機構采用PRRRRR形式,即1P5R形式。
六自由度串聯管片拼裝機由回轉系統、平移系統、機械臂和機械手構成。其中回轉系統的主要功能是在拼裝管片的過程中提供回轉力矩,形成機構整體繞管片軸線的回轉運動,并且為整個拼裝系統提供支撐作用。提升系統的主要結構是2個提升油缸和2個導桿,2個提升油缸完成對管片的提升和上推;平移系統主要由1個雙作用油缸和2根水平導桿組成;夾取裝置用于拾取管片并進行微小的姿態調節。
如圖7所示,六自由度串聯型拼裝機由6個液壓執行機構完成運動,6個執行機構完全約束拼裝機械手的6個自由度。其中平移油缸提供拼裝機整體沿隧道軸線(z軸)平移;回轉油缸帶動拼裝機整體沿軸線回轉,大臂油缸驅動機械大臂擺動,小臂油缸驅動機械手裝置整體(小臂)在大臂上擺動,回轉馬達和大臂、小臂油缸共同作用調整管片沿x、y軸向的位置以及繞z軸轉動的姿態;仰俯油缸和平轉油缸分別驅動機械手帶動管片繞x、y軸轉動進行姿態調整。
此外,拼裝機械手裝置內設有管片夾取裝置,內置油缸安裝在轉動板上,油缸伸縮帶動吊裝螺栓拾取管片,管片貼緊轉動板之后隨轉動板一起作空間六自由度運動。
在xy軸平面內,由回轉馬達和大臂、小臂油缸共同作用,使管片按所需軌跡運動。圖8中,以ω為OA相對x軸的轉角,由回轉馬達轉動量直接控制ω值,θ1為∠OAB,由大臂油缸伸出量控制θ1值,θ2為∠ABC,由大臂油缸伸出量控制θ2值。根據ω、θ1、θ2以及相關臂長數據的幾何關系進行三角函數計算,可得出拼裝機拾取點C的平面坐標以及繞z軸的轉動姿態角度。同樣,對于指定的管片拾取或安裝點,由計算機計算出所需的回轉馬達旋轉角度以及油缸行程,將拼裝機運行至相應的位置;根據合適的管片拼裝路徑也能計算出相應的執行元件(馬達和油缸等)的動作指令。
根據拼裝機機械臂的張開大小,管片與拼裝機之間的連接點可在直徑為3.67~6.95 m的范圍運動,如圖9(a)所示。通過2臺串聯型拼裝機協作施工,可完全覆蓋本工程所用類矩形隧道管片所有拾取及安裝區域,如圖9(b)所示。
4 結 語
本文設計的1P5R型管片拼裝機,創新地將串聯型運動機構應用于隧道盾構管片拼裝機中,這種新型拼裝機解決了工程中類矩形斷面隧道管片的拼裝難題,亦可擴展應用至其他異形斷面隧道管片的拼裝。通過在計算機預置拼裝路徑,根據需要實時計算各執行元件的動作過程,可以實現所需運動軌
跡,提高了施工效率,并為隧道施工的自動化和智能化提供了發展空間。
參考文獻:
[1] 郭 昊.矩形頂管機下穿鄭州市中州大道工程簡介[J].中國市政工程,2013(5):53-55.
[2] 賈連輝.超大斷面矩形盾構頂管設計關鍵技術[J].隧道建設,2014,34(11):1098-1106.
[3] Tadashi Hashimoto.市區軟土地層地下工程施工新技術[J].隧道建設,2012,32(3):261-269.
[4] 李 剛,于天彪,費學婷,等.基于數字樣機的TBM管片拼裝機運動學和動力學仿真[J].中國工程機械學報,2012,10(3):260-264.
[5] 滕延鋒.矩形盾構新型管片拼裝設備與拼裝技術的研究[J].建筑施工,2016,38(2):221-223.
[6] 呂建中,莊欠偉.φ14.87m盾構液壓推進系統分析[J].筑路機械與施工機械化,2008,25(7):75-77.
[7] 卞永明,方曉駿,楊濛,等.矩形盾構管片拼裝機同步控制系統的設計[J].同濟大學學報:自然科學版,2016,44(4):637-644.
[8] 張友湖,余克文.基于TBM的管片拼裝機結構設計及三維建模[J].煤礦機械,2011,32(7):14-17.
[9] 喻 萌.TBM管片拼裝機的虛擬樣機研究[D].武漢:武漢大學,2005.
[10] 程 燕.隧道管片自動拼裝機的虛擬樣機及其仿真[D].武漢:武漢大學,2005.
[11] 黃業平.隧道掘進裝備鉸接與管片拼裝機構設計研究[D].上海:上海交通大學,2010.
[12] 黃業平,郭為忠,高 峰.3-RPS并聯構型的管片拼裝新機構[J].機械設計與研究,2010,26(3):12-14,18.
[13] 錢曉剛.盾構掘進設備中的管片拼裝機機構設計方法[D].上海:上海交通大學,2008.
[14] 錢曉剛,高 峰,郭為忠.六自由度盾構管片拼裝機機構設計[J].機械設計與研究,2008,24(1):17-20.
[15] 崔國華.盾構管片拼裝機的設計及動態性能研究[D].長春:吉林大學,2009.
[16] 岳彥炯.基于虛擬樣機的六自由度隧道管片拼裝機設計研究[D].長春:吉林大學,2008.
[17] 李文福.盾構管片拼裝機的結構分析[J].山西建筑,2010,36(5):337-339.
[18] 李 光,趙曉東.管片拼裝機新型旋轉限位裝置的設計[J].隧道建設,2010,30(1):97-99.
[19] 孫志超,黃曉華.基于3-PRPS并聯機構的管片拼裝系統的設計與應用[J].機械制造與自動化,2013,42(3):127-129.
[責任編輯:王玉玲]