基于ABAQUS的導向輥運動優化控制
2017-03-29 08:27:10郝用興張紅藝王超峰馮梅玲
河南科技 2017年1期
郝用興 張紅藝 王超峰 馮梅玲
(華北水利水電大學機械學院,河南鄭州 450011)
基于ABAQUS的導向輥運動優化控制
郝用興 張紅藝 王超峰 馮梅玲
(華北水利水電大學機械學院,河南鄭州 450011)
基于ABAQUS平臺建立環件軋制優化系統,以導向輥的速度修正系數作為控制變量,以環件的偏擺振動作為環件軋制穩定性的評價標準,建立速度修正系數方程對導向輥的軌跡進行優化,運用Python語言編寫優化程序,利用有限元軟件進行模擬分析,得到導向輥的精確軌跡。結果表明,采用該方法能夠較精確地控制導向輥的運動軌跡,減小環件偏擺振動,提高軋制系統的穩定性。
環件軋制;導向輥;偏擺;優化;有限元仿真
在環件軋制過程中,進給速度、芯輥直徑、軋輥與環件間的摩擦系數等參數對軋制具有重要影響[1,2]。在有限元模擬中,建立三維有限元模型,采用閉環控制減小誤差,利用圖像處理和熱成像技術檢測環件直徑[3,4]。而導向輥對于減小環件振動,提高系統穩定性具有重要作用。趙炳利等[5]利用Deform-3D軟件對導向輥的位置進行精確定位控制。目前,對于導向輥軌跡優化的研究較為少見,本文主要研究導向輥的運動規律,并合理優化其運動軌跡,以保持環軋系統穩定性,提高環件精度。
1 環件徑向軋制有限元模型
運用ABAQUS有限元軟件對環件軋制系統進行模擬仿真,得到了環件幾何中心的偏擺量,推導了導向輥速度系數優化函數,并運用Python語言編寫雙導向輥徑向軋制優化程序。假設環件沿軸向方向不發生變形,在環件軋制邊界條件中限制環件軸向運動。忽略環件與導向輥之間的摩擦力,設置驅動輥、芯輥、導向輥設置為剛體。環件在常溫下徑向軋制,材料選用鉛,不考慮溫度對材料變形的影響,取材料密度ρ=11 340kg/m3,泊松比μ=0.44,彈性模量E=1.7×1010Pa。基于ABAQUS平臺,建立環件徑向軋制三維有限元模型,有限元模型參數[6]見表1。
2 導向輥的模擬控制
在環件軋制模型中,環件初始中心位于驅動輥圓心與芯輥圓心的連線上,建立坐標系如圖1所示,r0、R0環件內、外圓的初始半徑為r0、R0,芯輥進給速度為v,環件初始厚度為H0,H0=R0-r0,根據環件軋制理論以及環件軋制體積不變原理[7],可知:
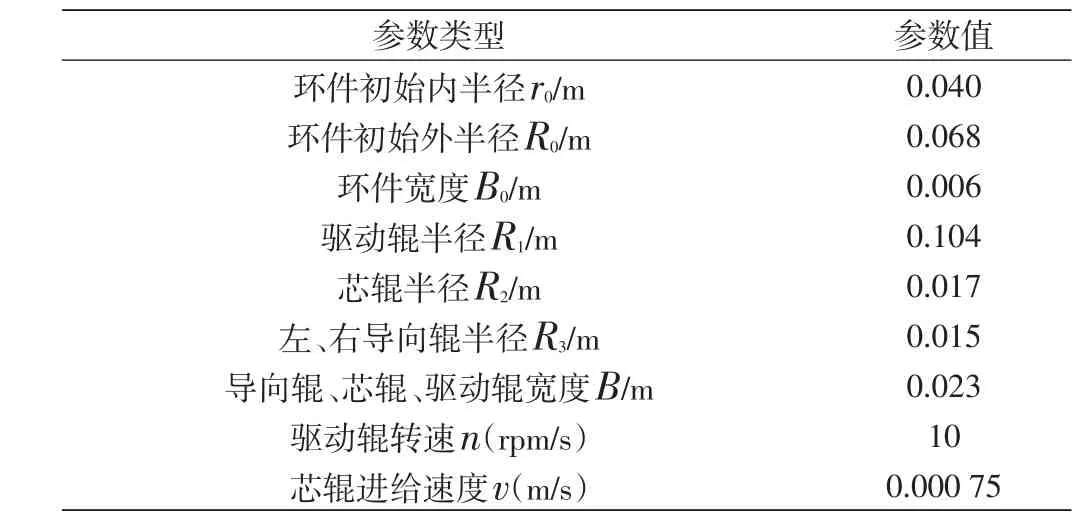
表1 有限元模型參數
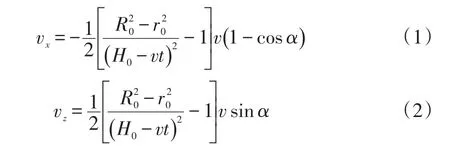
式(1)(2)中,vx、vz分別是導向輥圓心在x軸和z軸方向上的移動速度分量,且兩導向輥關于x軸對稱。
以上求出的速度公式是在理想狀態下得到的結果,即在不考慮環件圓度誤差以及環件在軋制變形區中的滑動現象。引入導向輥速度修正系數η[8],則導向輥圓心移動速度在x、y方向的分量為:

式(3)(4)中,η是一個多因素影響的變量,且0<η<1。

圖1 環件軋制結構圖
2.1 環件幾何中心評價方法
導向輥的位置是隨環件坯料尺寸的變化而變化的,因此可沿著環件毛坯表面均勻選取節點。導向輥圓心的移動速度則由式(3)與式(4)確定。環件幾何中心坐標xc、zc是環件表面所有節點坐標平均值,其大小變化反映環件在x軸和z軸方向偏擺振動程度[8]。所有節點x、z方向的輸出量可通過建立節點集(SET),再在History Output(歷史變量輸出)中選擇輸出。

式(5)(6)中,n是環件節點個數;xi、zi是第i個節點在x、z軸的坐標。
2.2 導向輥速度修正系數函數
根據設計要求,優化函數需要在環件幾何中心在z軸方向的偏擺量大于正常穩定軋制所允許的最大偏擺量時,對導向輥圓心的移動速度進行優化,使其能夠快速進入到正常穩定軋制所允許的最大偏擺量范圍內。導向輥圓心的移動速度優化是優化導向輥速度修正系數η,且0≤η≤1,希望根據環件的偏擺量進行快速調整,并且要求速度調整范圍比較廣泛。
取修正系數初始值η0=1,正常穩定軋制所允許的最大偏擺量wD由實際軋制需求確定,環件幾何中心在z軸方向的最大偏擺量w由式(6)所確定,則導向輥速度修正系數為:

2.3 環件軋制控制系統
根據導向輥隨環件的擴大而受迫后退的情況和環件軋制體積不變原理,計算環件幾何參數,并通過其與導向輥之間的幾何關系確定導向輥的位置。基于以上思路,開發導向輥圓心移動速度控制程序,優化導向輥速度控制算法,精確控制導向輥位置如圖2所示。

圖2 控制流程圖
由于環件偏擺時x方向的振動非常小,因此,優化過程中,以導向輥速度系數η作為自變量,進而控制導向輥圓心移動速度,以環件z方向的偏擺量作為環件穩定軋制的評價標準,運用Python編寫優化程序,利用ABAQUS進行模擬分析。運用ABAQUS對環件軋制系統進行快速建模,通過后處理模塊進行分析,提取環件各節點坐標,利用式(5)(6)計算環件幾何中心位置,確定環件在z軸方向的偏擺大小。若其大于軋制所允許的最大偏擺量wD,則調用式(7)調整導向輥圓心移動速度,改變導向輥運動軌跡重新模擬運行;反之,則運行下一個增量步,調用式(3)(4)確定導向輥軌跡繼續模擬運行,直至滿足結束條件,完成環件模擬軋制過程。本研究首先建立環件徑向軋制的自動建模腳本,其次編寫環件數據提取及處理模塊和導向輥圓心移動速度修改模塊,最后使用主文件調用上述模塊運行分析以實現環件軋制模型的建立、提交分析與優化等過程。
3 結果分析
根據環件軋制的相關參數,取α=60°,軋制所允許的最大偏擺量wD=0.001 5m,t=15s,則導向輥1的圓心在x軸上的初始速度為vx=-5.357 1×10-4m/s,在z軸上的初始速度為vz=9.278 5×10-4m/s,;導向輥2的圓心在x軸上的初始速度為vx=-5.357 1×10-4m/s,在z軸上的初始速度為vz=-9.278 5×10-4m/s。其優化分析結果與無導向輥、導向輥固定、導向輥隨動即未優化等4種情況下環件幾何中心在z軸上的偏擺時間曲線如圖3所示。
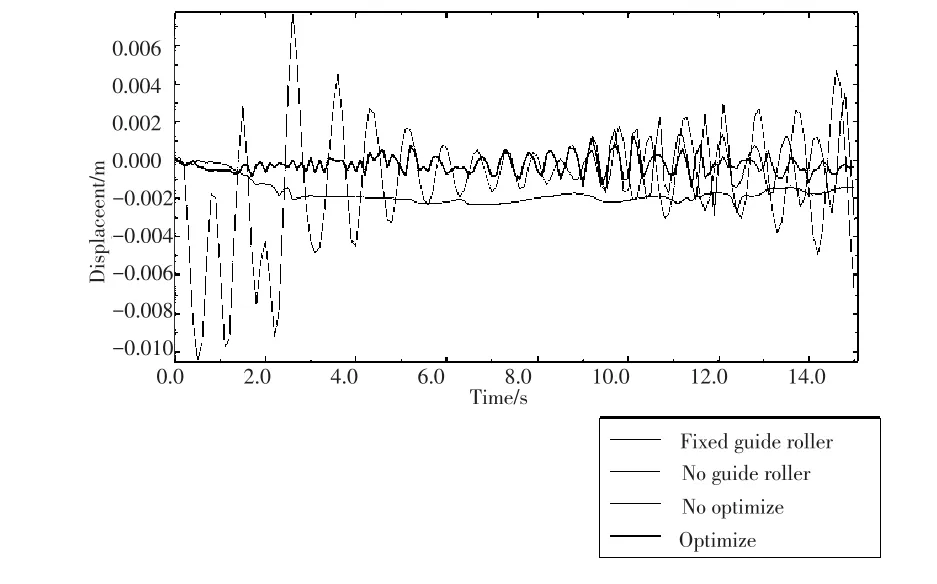
圖3 環件幾何中心在z軸方向的偏擺量變化曲線
分析圖3可以得出,沒有導向輥約束環件時,在軋制前期0~7s內,環件z軸方向偏擺振動很嚴重;在7~10s,環件z軸方向偏擺振動小;在10~15s,環件z軸方向偏擺振動變大。導向輥不動,在0~2s,環件z軸方向偏擺振動小;在2~15s,導向輥逐漸將環件壓扁。導向輥隨動,在0~9s,環件z軸方向偏擺振動小;在9~15s,環件z軸偏擺幅度逐漸變大。優化后,在整個軋制前期0~10s,環件z軸方向偏擺很小,環件中心最大偏擺量未超過本研究設定的最大允許偏擺量0.001 5m,導向輥軌跡優化程序并未啟動;在軋制后期10~15s,環件中心最大偏擺量逐漸增大,在第10s內其超過本研究設定的最大允許偏擺量0.001 5m,導向輥軌跡優化程序啟動,使得環件z軸方向偏擺幅度減小,其結果是環件在z方向的最大偏擺量始終小于0.001 5m,滿足設計要求。
4 結論
①根據環件在軋制過程中的變形特點,由幾何關系得出導向輥運動軌跡,建立導向輥速度優化函數,開發出了導向輥圓心移動速度控制程序。
②本研究通過控制并優化導向輥的運動軌跡,減小了環件偏擺振動,其運行結果可以得到環件穩定軋制過程中導向輥的精確運動軌跡。
③在軋制過程的后期,本文的優化方法表現出了極大的優越性,保證了環件軋制系統穩定性。
[1]華林,黃興高,朱春東.環形件軋制理論和技術[M].北京:機械工業出版社,2001.
[2]V Jenkouk,G Hirt,M Franzke,et al.Finite element analy?sis of the ring rolling process with integrated closed-loop control[J].CIRP Annals-Manufacturing Technology,2012(1):267-270.
[3]XH Han,L Hua,GH Zhou,et al.FE simulation and experi?mental research on cylindrical ring rolling[J].Journal of Materials Processing Technology,2014(6):1245-1258.
[4]Tobias Husmann,Horst Meier.Use of image processing to evaluate radial-axial rolled rings[J].Procedia Engineering,2014(81):304-309.
[5]趙炳利,周宇,李曉飛.環件軋制中導向輥運動的研究[J].冶金設備,2012(2):9-12.
[6]楊紅,馮耿,呂鑫,等.高鐵軸承內圈冷輾擴導向輥閉環控制的研究[J].機械制造,2016(1):37-42.
[7]王夢寒,汪豐林,王爽,等.大型環件徑軸向軋制有限元模擬中導向輥運動控[J].熱加工工藝,2010(21):89-91.
[8]YX Hao,YM Han,HT Cheng,et al.The Stability Evalua?tion of Radial Ring Rolling[J].Advanced Materials Research,2012(482-484):1229-1232.
The Optimal Control of the Guide Roller Motion Based on ABAQUS
Hao Yongxing Zhang Hongyi Wang Chaofeng Feng Meiling
(College of Mechanical,North China University of Water Resources and Electric Power,Zhengzhou Henan 450011)
The optimization system of ring rolling is established based on the ABAQUS platform.The speed correc?tion coefficient of guide roller is as a control variable and the deflection of geometric center of the ring amount is as a evaluation standard of ring rolling stability.Speed correction coefficient equation is established to optimize the trajec?tory of the guide roller.Accurate motion trajectory of guide roller is got in the process of stable ring rolling by writing optimization program using Python and simulating and analyzing it using the finite element software.The results indi?cated that this method could precisely control the trajectory of guide rollers,reduce the yaw vibration of ring and im?prove the stability of the rolling system.
ring rolling;guide rolls;deflection;optimization;finite element simulation
TG335
:A
:1003-5168(2017)01-0064-03
2017-01-03
2015年度河南省基礎與前沿技術研究(152300410215)。
郝用興(1966-),男,博士,教授,研究方向:機械工程。
張紅藝(1992-),男,碩士在讀,研究方向:現代機械設計理論與技術。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
機械工程師(2015年10期)2015-02-02 01:14:03
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
計算物理(2014年2期)2014-03-11 17:01:44
機電產品開發與創新(2014年4期)2014-03-11 16:42:24