基于雙波段視頻探測的智能水炮系統設計
2017-03-23 03:40:29胡乃平耿同同王馨民
紅外技術 2017年10期
胡乃平,耿同同,王馨民
?
基于雙波段視頻探測的智能水炮系統設計
胡乃平,耿同同,王馨民
(青島科技大學 信息學院,山東 青島 266100)
針對目前大空間火災探測的難點,研究出了一種基于雙波段視頻檢測的智能水炮系統。將DSP芯片TMS320DM648作為視頻處理芯片并采用STM32f103作為控制芯片,利用雙波段(紅外與可見光)對火災的熱、色、形以及光譜與運動特性進行識別,使火災探測準確度大大提高,采用步進電機作為整個系統的驅動部分,CAN作為通信總線提高了水炮的反應速度與靈活性。智能水炮在25s內可定位火源進行滅火,監控距離可達100m,誤報漏報率極低,為大空間消防提供了更好的選擇。
大空間消防;智能水炮;火焰探測;雙波段;紅外;可見光
0 引言
隨著社會的發展進步,各種大空間建筑越來越多,這些建筑大部分為公共場所,因此消防難度比較大,一旦發生重大火災,造成的人員財產損失將特別大。傳統自動消防噴水滅火系統具有滅火及時性差、滅火效率低、滅火的針對性不強、滅火系統管路復雜等缺點[1],對大空間建筑物和大面積曠場的消防顯得無能為力[2],智能水炮應運而生,智能消防炮與傳統的滅火裝置相比具有實時性、有效性、可靠性、系統簡單、安裝方便以及節能等優勢。國內智能水炮采用普通紅外或者紫外探測,漏報誤報率較高,造成了很多不必要的損失,而日本或者歐美的智能水炮雖然性能優越但價格高昂,如日本的消防炮,每臺折合人民幣約100萬元,整套系統可達上千萬[1],因此開發性價比高的智能水炮系統對我國大空間火災具有重大的意義。因此,應時代要求,設計了一種基于雙波視頻檢測的智能水炮控制系統,通過對火焰圖像靜態動態特征以及溫度的檢測來找準火源,進行實時滅火。
1 智能水炮系統硬件設計
智能水炮系統包括3個部分:火焰探測部分、電機驅動部分、控制部分與其他聯動部分,主要包括攝像頭模塊、視頻處理模塊,控制模塊、電源模塊以及電機驅動模塊等。由于視頻信號處理較為復雜,因此采用雙核處理器,也就是將DSP芯片DM648只用于視頻信號的處理,來判斷并定位火災信號,STM32則用于整個系統的控制。硬件設計方案如圖1。
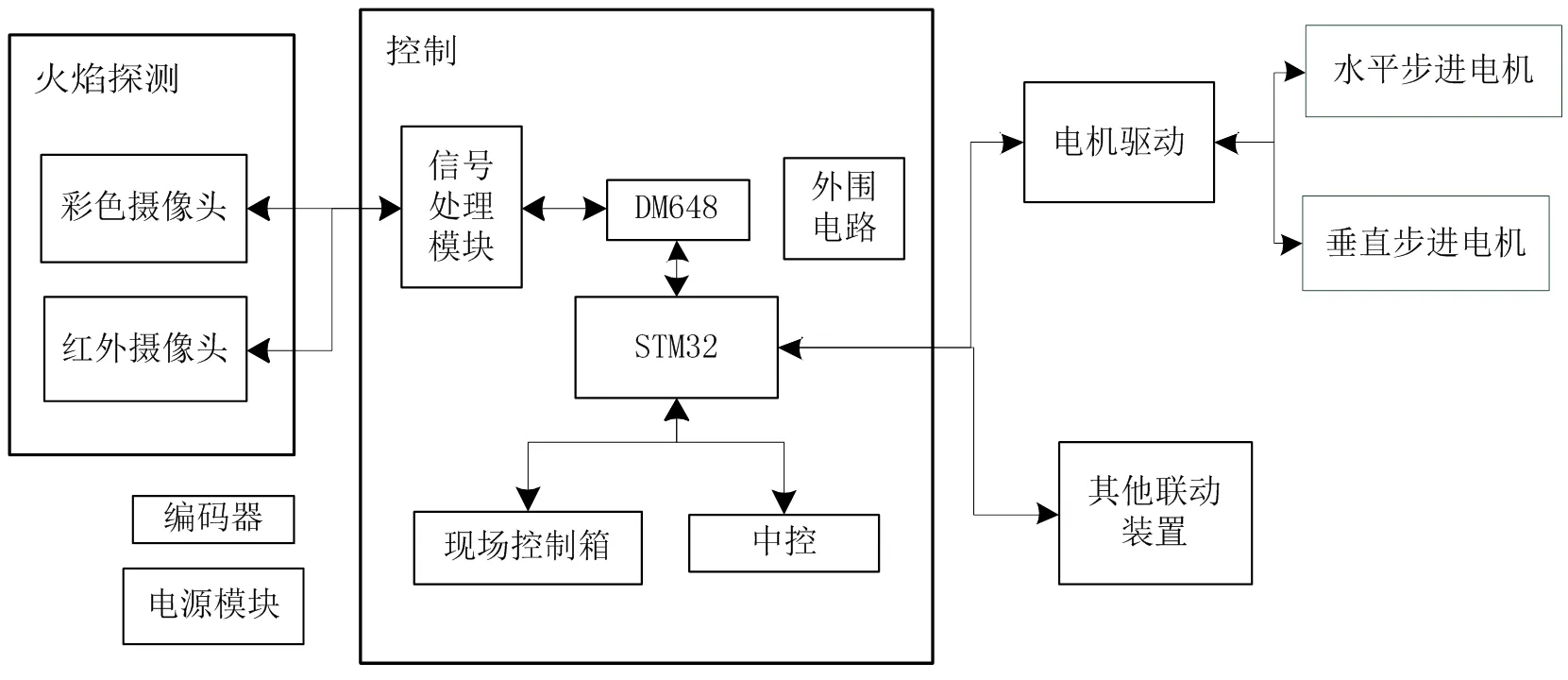
圖1 系統硬件設計
1.1 火焰探測部分
智能水炮的火焰探測部分主要完成發現火災,定位著火點的功能。本系統采用高速面陣相機作為火災探測前端,既可防火防盜,又可實現監控功能,并具備防爆防潮的功能,滿足了智能水炮在惡劣環境下的工作要求。
系統采用彩色與紅外雙攝像頭來為智能水炮提供準確的火災信號,彩色攝像頭用來探測可見光信號,對于火災圖像的動態與靜態分析具有一定的可靠性,但易受類似火焰的物體(強光照、運動物體等)造成的干擾,因此本系統加入了紅外攝像頭來彌補這一缺陷。紅外對溫度的探測為系統排除了火焰類似物體的干擾,使得水炮誤操作率極低。
1.2 控制與通信部分
控制部分分為中控與現場控制兩部分,智能水炮通過攝像頭將現場情況實時傳遞給控制中心,控制中心可遠程對水炮進行遙控;現場控制可分為手動控制與自動控制兩部分,工作人員可通過現場控制箱來控制智能水炮,在無人監護時,智能水炮可自動完成火災探測、定位、滅火、復位的功能。當人發現火災時,中控與手動控制為滅火操作提供了人為控制,在一些大空間場所,當人們發現火災時可能已經形成較大火災,因此在火災初期,智能水炮自動滅火尤為重要,本系統可通過自動監控保護區域將火災消滅在萌芽中。
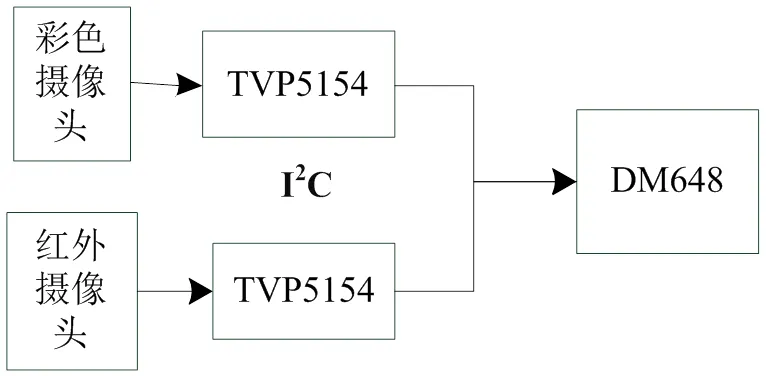
圖2 視頻采集硬件結構
智能水炮采用32位基于ARM核心的帶64k字節閃存的微控制器STM32f103作為主控芯片。其內核為CORTEX-M3,最高為72MHz工作頻率,處理能力為1.25DMips/MH,功耗為0.19mW/MHz[3]。具有高性能、低成本、低功耗等優點,為滅火時效性提供了有力的保證;多達80個快速I/O端口既可接收DM648的火災結果信號,輸出對電機進行控制,又可作為CAN地址標識,另外擁有9個通信接口包括2個I2C接口,3個USART接口,2個SPI接口,CAN接口以及USB接口滿足了智能水炮的可擴展性。多達3個UART接口,既可與現場控制箱進行通信[4],又可與中控進行通信。系統的優勢在于單片機與現場控制箱、中控通過CAN總線進行通信,相對于RS485通信協議來說,CAN總線大大提高了總線利用率并降低了錯誤率,系統開發難度也降低,開發成本也隨之降低,具有較好的實用性[5]。如圖3,STM32通過自帶的CAN接口與CAN收發器TJA1050相連,TJA1050負責將信號進行轉換傳輸,CAN通信距離最長達10km且通信速率較高,可將現場情況實時傳遞給中控,中控與現場控制也能實時控制現場,另外單片機通過現場總線來控制其他聯動裝置,完成了啟泵開閥噴水滅火以及報警功能,做到了全自動現場的功能。
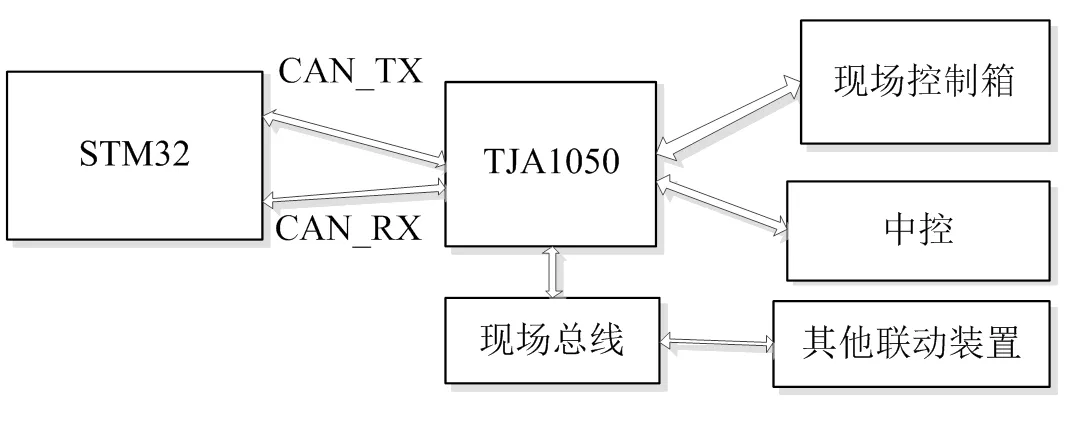
圖3 控制信號通信
1.3 電機驅動部分
智能水炮采用無反饋信號的步進電機作為整個系統的動力源,步進電機將電脈沖信號轉變為角位移或者線位移來控制步進電機件[6]。
系統中STM32通過繼電器將脈沖信號發送給步進電機驅動器,驅動器收到信號后驅動步進電機按照設定的方向轉動一定角度,通過控制脈沖個數來控制角位移量,從而實現準確定位火源的功能,同時單片機可通過控制脈沖的頻率來控制電機轉動的速度與加速度,使炮體轉動更加靈活準確。然而步進電機在超負載時會破壞同步功能,因此系統設置了限位功能,當炮體轉至限位時反轉,既保護了電機,又滿足了全方位探測保護區域的需要。
2 軟件設計實現
圖4為軟件流程圖,系統初始化后與現場控制箱以及中控進行通信參數設定,紅外攝像頭發現火災時,STM32通過繼電器驅動電機控制炮體水炮轉動來進行探測,且DM648通過一定算法處理雙視頻信號并判斷是否有火災發生,當水炮巡視一周后未發現火災信號則進行復位。當DM648判斷為火災后,STM32通過聯動進行報警,并控制炮體水平與垂直的轉動來確定火源坐標,將炮口通過一定的角度補償算法來瞄準火源中心,通過聯動啟泵開閥來噴水滅火,滅火完成后進行復位,恢復監控狀態。當人為發現火災時,通過中控或者現場控制箱根據視頻信號或者現場情況對水炮進行遙控定位火災,啟泵開閥進行滅火,滅火完成后進行復位。
系統通過雙攝像頭對火源進行定位,DM648將紅外攝像頭與彩色攝像頭所采集的圖像進行對比,并分別確定火源在兩個攝像頭的水平坐標,通過已知兩個攝像頭之間的距離來計算火源的位置,得出火源的準確坐標。
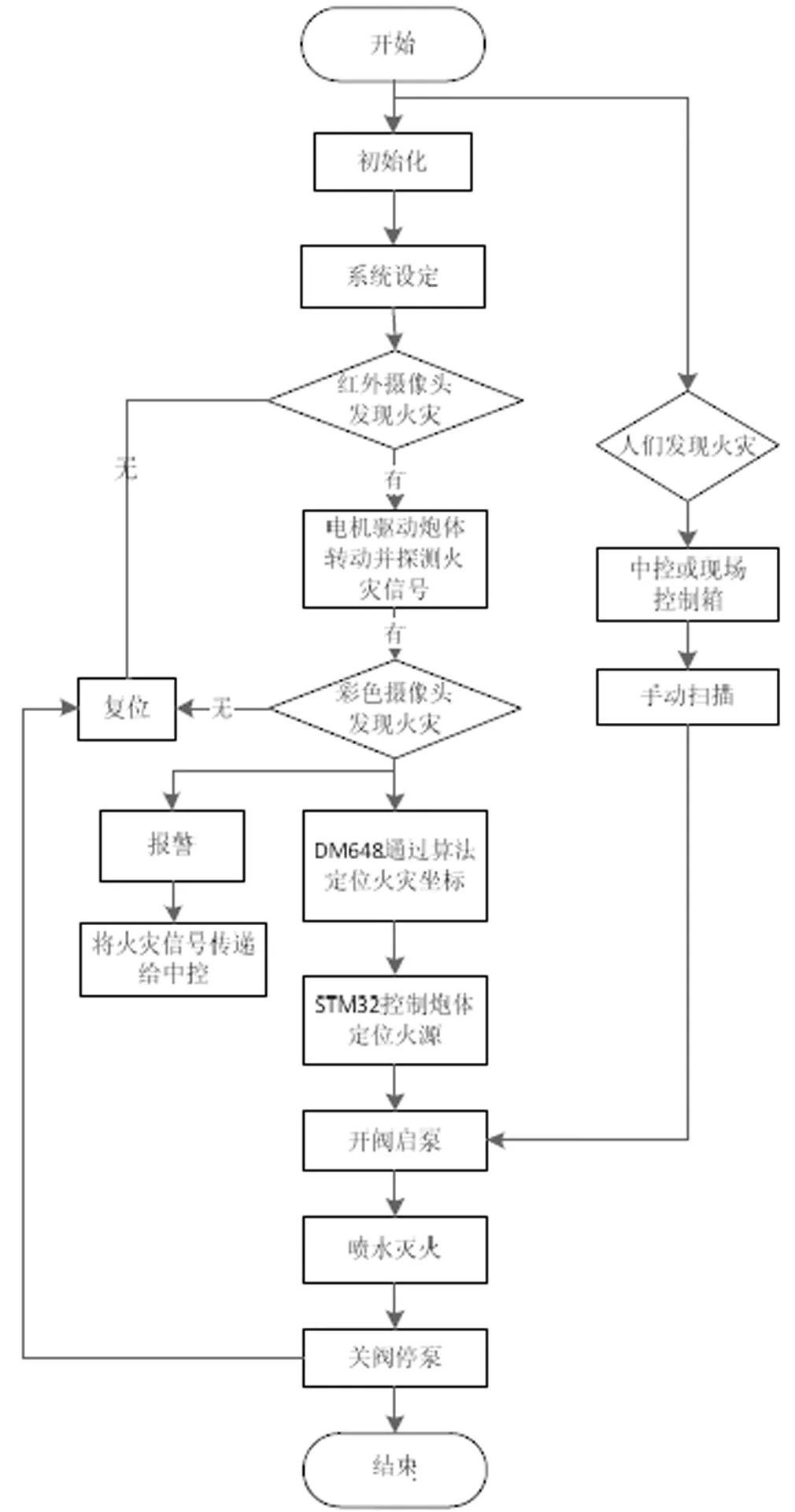
圖4 軟件流程圖
3 火災探測算法
系統火災探測算法,如圖5,包括紅外探測與可見光探測,將熱輻射特性與視覺特性相結合。紅外探測作為火災探測的基礎,可以有效降低或消除強光照、運動物體等干擾物對火焰探測的影響。當DM648判斷紅外攝像頭檢測到火焰時,彩色攝像頭進行火災探測。
首先是用典修辭格的使用。“水向東流”是李煜“問君能有幾多愁,恰似一江春水向東流”典故的使用,表現了主任公內心無限的愁苦。
3.1 紅外探測算法
首先紅外攝像頭隨機采集多幅紅外圖像,不斷對圖像進行差分運算處理,若未超過閾值,則系統復位;若超過閾值則判斷檢測到有較強熱輻射,進行圖像分割,將可疑區域進行標記,并將不可能是火源的區域濾除。再通過提取火焰圖像特征的方式,進行更進一步的判別,當疑似火源方位熱輻射能量超過設定的閾值范圍時,則DM648判斷紅外攝像頭檢測到火焰。

圖5 火災探測算法
1)熱輻射探測
火焰在燃燒過程中通常會產生大量的熾熱微粒,這些微粒使火焰發射出電磁輻射[7],而這些電磁輻射在紅外圖像中表現的異常明顯。因此,通過圖像差分法對當前獲取的圖像與背景歷史圖像相減,可以快速的檢測到是否有較強的熱輻射。通過圖像的減法運算,提高了圖像處理的速度,從而提高了智能水炮系統的探測速度。
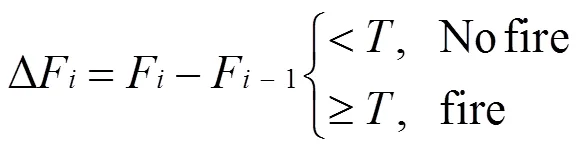
式中:F和F-1分別表示當前幀和前一幀圖像;DF為兩幀圖像所有對應像的差值,取絕對值的平均值;為根據實驗得到的一個閾值,該值的選取決定了熱輻射探測結果的穩定性。當DF大于等于閾值時,紅外攝像頭判斷檢測到有較強熱輻射。
2)閾值的選取
通過拍攝大量的火災圖像和非火災圖像,并統計火災圖像和非火災圖像連續180幀的幀間平均變化量。發生火災時,由于兩幀紅外圖像有明顯變化,導致幀間平均變化量較大;而無火災的情況下,由于一些小的干擾,存在輕微波動。通過計算可得火災紅外圖像的180幀變化量的平均值為0.1792,非火災紅外圖像的平均值為0.0573。因此,為了充分檢測火災圖像,將閾值設置為0.05。
3)灰度處理
為加快處理速度,圖像處理過程中一般要把彩色圖像,如圖6,轉換為灰度圖像,這種轉化為灰度的過程叫做灰度化處理[8],如圖7為轉化后的灰度圖。本文采用了一種不同于常規灰度化算法的R-G-B色差分量的灰度處理方法,轉換關系為:
Gray(,)=1.8(,)―0.6(,)―0.2(,) (2)

圖6 火焰燃燒紅外圖

圖7 灰度圖
4)圖像分割
火焰在灰度值上通常表現處高亮特征,我們通常利用這一特性,在灰度圖的基礎上進行可疑火焰分割[8]。本文利用閾值方法對圖像進行分割,根據圖像的灰度值大于或小于該閾值,來進行圖像分割。
設原圖像為D(,),分割后的二值圖像為R(,),根據圖像中每個像素則有:
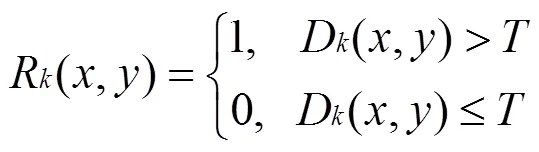
所以可知閾值分割的關鍵就是確定T。本文拍攝大量的火災圖像并統計它們的灰度直方圖,通過分析并結合經驗,選擇175作為火焰圖像的分割閾值。如圖8為閾值分割后的效果圖。
5)頻率檢測算法
對可疑區域進行標記后,為確認其是否為火焰,通常需要對火焰進行特征提取再次判斷。火焰具有閃爍特性,火焰閃爍是區別于其他干擾源的一種重要的特征,它反映了火焰所釋放的能量及其作用范圍的變化[9]。根據現在的研究成果可知,火焰的閃爍頻率范圍主要集中在8~12Hz[9]。火焰閃爍頻率計算公式為:
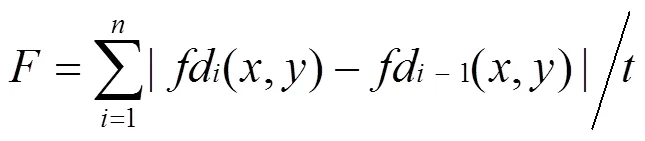
式中:為火焰的閃爍頻率;fd和fd-1表示當前幀和前一幀的檢測結果;表示從=1幀到幀的時間。
3.2 可見光探測算法
可見光圖像探測則通過對火源的顏色特征、邊緣特征、以及動態特征等多項特征進行判斷[10],首先通過圖像的色度特征來去除不是火焰的部分,然后通過圖像的紋理特征來區分火焰與干擾目標,最后通過面積變化率等動態特征進行火災識別。
1)顏色特征
圖像中的像素可由RGB三個值表示,代表紅、綠、藍3個分量,如圖9,火焰像素點一般出現在紅黃范圍[11],因此火焰需滿足條件≥>且>R,其中R為紅色超過的閾值[12]。另外,如圖10,背景中較亮的部分可能會引起誤判,因此色彩飽和度需要大于一定閾值:
其中系統選取RT為130,ST為55來判斷是否有火源,并圈出可疑區域。
2)邊緣特征
系統通過邊緣檢測與區域劃分來檢測火源,邊緣檢測采用較為簡單Roberts算子,通過對角線方向相鄰兩像素之差近似梯度幅值來檢測邊緣[13],通過梯度公式[14]得到圖11中邊緣檢測結果,從圖中可以看出,火焰邊緣被很好的檢測出來。通過圖11與圖10的對比,通過邊緣的尖角程度與數量區分出火源疑似部分。
3)運動特征
火災初期,火源面積一般會越來越大,因此可以通過檢測火源的面積率來判斷可疑火源部分[15-18],通過上述顏色特征與邊緣特征得出火焰區域,計算當前幀圖像與隔一段時間后一幀圖像火焰像素數目,得出面積增長率D,定義如下:
式中:dS為在i+k時刻與i時刻火焰區域面積發生的變化;dt為所經過的時間;因此DS表示在i到i+k這個時間間隔內可能火焰區域的面積變化率。其中k值需大于1,由于火焰面積增長速度一定,若k值取得太小,則DS不能體現出火焰面積變化率。
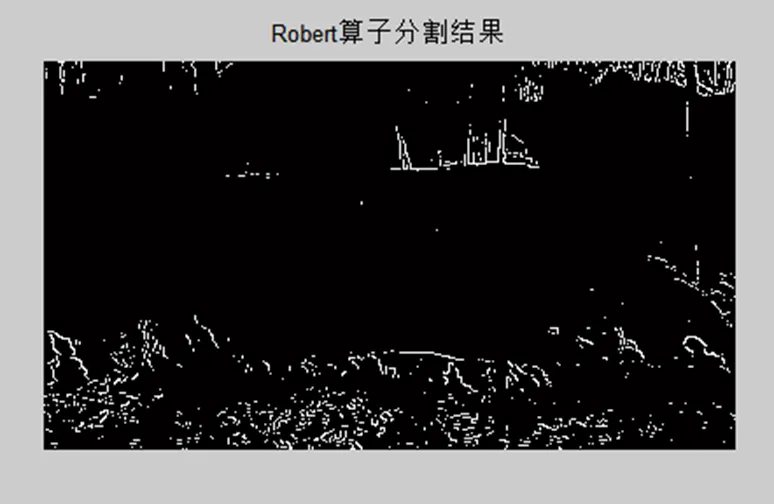
圖11 邊緣檢測圖像
3.3 火災探測實驗
實驗時水炮被設置在炮塔上,炮頭距離地面7m,噴射仰角為35°,水炮額定工作壓力為0.8MPa。實驗的火源為33cm×33cm油盤(內裝300mL汽油)和木材。實驗中還設置了多種干擾源(人體、打火機、煙頭等)。實驗結果(見表1),統計得出系統對火源的響應時間(水炮發現火源到系統報警的時間)平均小于25s,水炮的射程可達57m(與水炮壓力、噴射仰角等因素有關)。隨著火源距離的加大,水炮的漏報警概率有所增加,但在100m范圍內水炮誤報漏報率還是極低的。實驗結果證明本文所采用的火災探測算法具有良好的抗干擾能力,而且具有較高的探測準確度和效率,能夠滿足工程應用要求。

表1 實驗結果
4 結論
基于雙波段視頻探測的智能水炮系統設計將熱輻射特性與視覺特性相結合,漏報誤報率極低,大大減少了目前大空間智能水炮誤操作造成的損失,且系統采用雙核處理,提高了智能水炮的反應速度與效率,系統最大的優勢在于采用本地處理,中控僅僅用來進行人工控制與監控,提高了大空間中智能水炮的實用性。
[1] 莊坤森. 大空間火焰檢測與自動消防炮系統研究[D].福州: 福州大學, 2010.
ZUANG Kunsen. Research on Large Space Fire Detection andAutomatic Fire-fighting Cannon System[D]. Fuzhou: FuzhoUniversity, 2010.
[2] 喻興隆. 智能消防炮控制系統設計[D]. 成都: 西華大學, 2011.
YU Xinglong. The Control System Design of Intelligent FireMonitor[D]. Chendu: Xihua University, 2011.
[3] 陳磊, 黃繼風. 基于視頻的火焰檢測方法[J]. 計算機工程與設計, 2014(9): 3143-3147.
CHEN Lei, HUANG Jifeng. Flame detection method based on video[J]., 2014(9): 3143-3147.
[4] 魏崇毓, 王馨民. 基于紅外、紫外雙波段探測的智能水炮系統設計[J].紅外技術, 2016, 38(10): 877-883.
WEI Chongyu,WANG Xinmin. Design of intelligent water Cannon system based on PIRS and UV detection[J]., 2016, 38(10): 877-883.
[5] 蔡鑫. 基于紅外技術的野外火災探測系統研究[D]. 南京: 南京航空航天大學, 2008.
CAI Xin. The wild fire detection system based on infrared technology research[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2008.
[6] 嚴云洋, 杜靜, 高尚兵, 等. 融合多特征的視頻火焰檢測[J]. 計算機輔助設計與圖形學學報, 2015, 27(3): 433-440.
YAN Yunyang, DU Jing, GAO Shangbing. Video Flame Detection Based on Fusion of Multi-feature[J]., 2015, 27(3): 433-440.
[7] 朱蕾. 基于視頻監控的火災特征檢測系統[D]. 吉林: 吉林大學, 2010. ZHU Lei. Fire Features Detection System Based on the Video Monitoring[D]. Jilin: Ji Lin University, 2010.
[8] 李忠海, 李建偉, 梁宵, 等. 基于圖像的消防水炮智能控制系統設計[J]. 沈陽航空航天大學學報, 2015, 32(5): 74-79.
LI Zhonghai, LI Jianwei, LIANG Xiao. The intelligent control system design of fire-fighting monitor based on video image[J]., 2015, 32(5): 74-79.
[9] 黃慶東. 基于紅外熱成像的火災檢測算法研究[D]. 廣州: 華南理工大學, 2014.
HUANG Qingdong. The Research of Fire Detection Algorithm Based On Infrared Thermal Imaging[D]. Guangzhou: South China University of Technology, 2014.
[10] 陳學軍, 楊永明. 基于雙核的視頻智能消防水炮設計[J]. 計算機測量與控制, 2015(12): 4184-4186.
CHEN Xuejun, YANG Yongming. Design of a video intelligent fire water cannon based on dual-core[J]., 2015(12): 4184-4186.
[11] 欒方軍, 李揚, 劉真全. 基于視頻圖像的火焰多特征檢測[J]. 測控技術, 2015(6): 27-30.
LUAN Fangjun, LI Yang, LIU ZhenQuan. Multi-feature flame detection based on video image[J]., 2015(6): 27-30.
[12] 胡艷, 王慧琴, 秦薇薇, 等. 基于粗糙集的火災圖像特征選擇與識別[J]. 計算機應用, 2013, 33(3): 704-707.
HU Yan, WANG Huiqin, QIN Weiwei. Fire image features selection and recognition based on rough set[J]., 2013, 33(3): 704-707.
[13] Rinsurongkawong S, Ekpanyapong M, Dailey M N. Fire detection for early fire alarm based on optical flow video processing[C]//9th,,,2012: 1-4.
[14] 王志強, 李立君, 黃雁, 等. 基于模糊最小二乘支持向量機的火災信號辨識[J]. 中南大學學報: 自然科學版, 2013, 44(1): 202-207.
WANG Zhiqiang, LI Lijun, HUANG Yan. Fire disaster signal recognition based on fuzzy least squares support vector machines[J].:, 2013, 44(1): 202-207.
[15] 榮建忠. 基于多特征的火焰圖像探測研究及實現[D]. 合肥: 中國科學技術大學安全科學與工程系, 2012.
RONG Jianzhong. Study and Realization of Multi-Feature Based Fire Image Detection[D]. Hefei: China university of science and technology of safety science and engineering, 2012.
[16] 盧玉書. 大空間火災探測與定位消防設計[J]. 信息技術與信息化, 2015(6): 208-211.
LU Yushu. Fire system design for large space fire detection and positioning[J]. Information Technology and Informatization, 2015(6): 208-211.
[17] 秦薇薇. 基于紅外視頻的火災探測算法研究[D]. 西安: 西安建筑科技大學, 2012.
QIN Weiwei. Fire Detection Algorithms Based on Infrared Video[D]. Xi'an: Xi'an University of Architecture and Technology, 2012
[18] WANG D C, CUI X N, PARK E, et al. Adaptive flame detection using randomness testing and robust features[J]., 2013, 55: 116-125.
Design of Intelligent Water Cannon System Based on Dual-band Video Detection
HU Naiping,GENG Tongtong,WANG Xinmin
(,266100,)
Aiming at fire detection in large spaces, a new intelligent water cannon system based on dual-band video detection is studied, which takes DSP chip TMS320dm648 as the video processing chip and STM32f103 as control chip. Dual-band(infrared and visible light) was used to study heat, color, shape, spectrum and motion characteristics of fire to estimate the fire. The accuracy of fire detection was improved. Stepper motor is used to drive the intelligent water cannon and CAN is used as the communication of the whole system to improve the reaction speed and flexibility of intelligent water cannon. The system can locate fire source in 25s and then carry out fire-fighting. And it can monitor the space within 100m. This system will be a better choice for large spaces fire fighting.
large space fire-fighting,intelligent water cannon system,fire detection,dual-band,infrared,visible light
TN215,TN23
A
1001-8891(2017)10-0884-06
2016-11-06;
2016-12-04.
胡乃平(1968-),男,山東臨沂人,教授,博士,主要從事工業信息化、物聯網方向的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32