基于模糊控制的智能滴灌控制系統設計
2017-03-21 02:02:47田思慶鄭家風張炳權
節水灌溉 2017年6期
關鍵詞:系統
田思慶,曹 宇,魏 強,鄭家風,張炳權
(1. 佳木斯大學信息電子技術學院,黑龍江 佳木斯 154007;2. 佳木斯大學機械工程學院,黑龍江 佳木斯 154007;3. 南京樂金化學新能源汽車電池有限公司,南京 210038 )
0 引 言
智能滴灌控制系統通過對作物生長土壤及光照環境數據進行實時檢測,并將檢測數據反饋給控制器,控制器將對數據進行處理,并根據實際情況對執行元件進行實時控制,實現對作物的適時、適量的精確滴灌。根據各個大棚內土壤濕度的不均衡性,以及難以建立精確的數學模型等特點。灌水器部分,即灌水系統采用模糊控制策略,同時為了保證滴灌水壓的恒定,根據3條支路比例電磁閥的開度,制定出模糊控制規則,以改變變頻器頻率,控制水泵轉速保持恒壓供水。本系統經過仿真和實地運行驗證,具有超調量小、動態時間短和穩健性好等特點。
1 滴灌控制系統
為滿足溫室大棚內作物生長的需求,而設計的溫室滴灌控制系統,不但節約了能源,降低了成本,更提高了作物灌溉的自動化水平[1]。滴灌控制系統工藝流程圖如圖1所示。

圖1 智能滴灌控制工藝流程圖
按照功能劃分滴灌控制系統主要由3個部分組成,如圖1中3個虛線框。其中第一部分為儲水控制部分即水源供給部分,以保證系統具有充足的水源;第二部分為主干路供水部分,以保證系統的恒壓運行供水;第三部分為灌水器控制部分,以實現灌水器管網的滴灌控制,保證土壤濕度的精確滴灌。
2 灌水器模糊控制設計
2.1 滴灌系統分析
本系統中灌水器滴灌系統本身是一個較為復雜的被控對象,用二階純滯后模型近似描述,如式(1)所示。式(1)中K為放大系數,τd為純滯后時間。
(1)
灌水器滴灌系統傳遞函數用式(2)近似描述:
(2)
2.2 灌水器模糊控制設計
本系統采用的模糊控制器為雙輸入單輸出的多變量二維常規模糊控制器,該控制器的兩個輸入變量分別為:土壤濕度值humidity和光照強度值light;輸出量設定為比例電磁閥的開度u。在模糊控制器中設其輸入模糊語言變量分別對應為HE,LE,輸出語言變量為U[2]。二維模糊控制器簡單示意圖如圖2所示。

圖2 二維模糊控制器結構圖
將土壤濕度偏差HE分為5個模糊集:{NB(negative big),NS(negative small),ZO(zero),PS(positive small),PB(positive big)},對應的物理狀態分別為{濕度采樣值遠低于設定范圍下限,濕度采樣值微低于設定范圍下限,濕度采樣值在設定值范圍內,濕度采樣值微高于設定范圍上限,濕度采樣值遠高于設定上限}。同時將濕度H的論域定義為{-2,-1,0,1,2}。得到土壤濕度變化模糊規則表,如表1所示。

表1 土壤濕度偏差HE隸屬度表
將光照強度偏差LE同樣分為5個模糊集:{NB,NS,ZO,PS,PB},其對應的物理狀態分別為{光照度采樣值遠低于設定范圍下限,光照度采樣值微低于設定范圍下限,光照度采樣值在設定值范圍內,光照度采樣值微高于設定范圍上限,光照度采樣值遠高于設定上限}。光照強度LE的論域為{-2,-1,0,1,2}。得到土壤濕度偏差變化率模糊規則表,如表2所示。
將輸出即比例電磁閥的開度U分為5個模糊集:{OF(open full),OB(open big),OM(open middle),OS(open small),CL(close)}[3],對應的物理狀態分別為{比例電磁閥全開,比例電磁閥大開,比例電磁閥半開,比例電磁閥微開,比例電磁閥關閉},比例電磁閥的開度U的論域為{0,0.5,1,1.5,2}。得到輸出比例電磁閥開度U的模糊表,如表3所示。

表2 光照強度偏差LE隸屬度表

表3 輸出比例電磁閥開度U隸屬度表
本設計采用工程上常用的三角型隸屬度函數作為模糊控制系統子集的隸屬度函數,三角形隸屬度函數如式(3)所示。
(3)
根據現場實際操作經驗制定模糊控制規則,制定控制規則如表4所示,共25條規則,例如:
(1)當濕度采樣值遠小于設定范圍下限,且光照度遠小于設定范圍下限,將比例電磁閥閥門大開;
(2) 當濕度采樣值遠小于設定范圍下限,且光照度處于設定范圍內,將比例電磁閥閥門全開;
(3)當濕度采樣值稍小于設定范圍下限,且光照度處于設定范圍內,將比例電磁閥開至半開;
(4)當濕度采樣值稍大于設定上限,且光照強度稍大于設定范圍上限,將比例電磁閥開至微開;
(5)當濕度采樣值遠大于設定上限,且光照強度稍大于設定范圍上限,將比例電磁閥關閉。

表4 智能滴灌控制系統模糊控制規則表
對模糊推理得到的模糊集合,采用最大隸屬度法對其進行反模糊化[4]。
3 灌水器滴灌系統模糊控制仿真設計
在MATLAB軟件中,對灌水器模糊控制器進行SUMILINK仿真研究,建立一個多變量二維模糊控制器,輸入為HE、LE,輸出為U。如圖3所示。
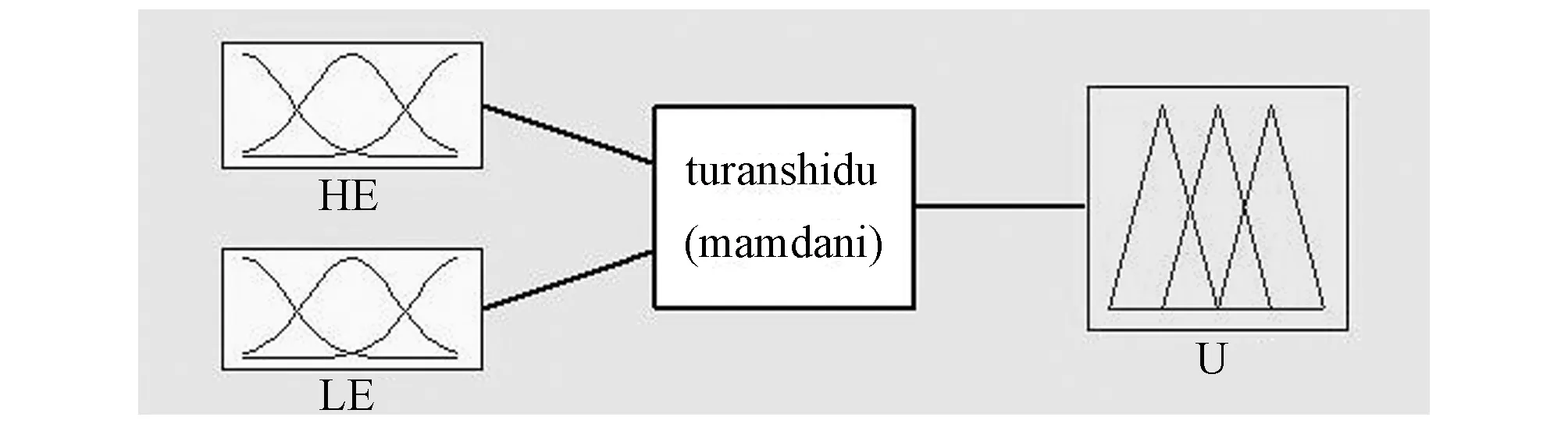
圖3 智能滴灌控制系統二維模糊控制器
進入隸屬度函數編輯器(Membership Function Editor) 修改輸入語言變量的論域為(-2,2),輸出語言變量的論域(0,2),并將輸入輸出隸屬度函數選擇為三角形隸屬度函數[5]。土壤濕度偏差HE隸屬度函數、光照強度偏差LE隸屬度函數、比例電磁閥開度U隸屬度函數,如圖4,5,6所示。

圖4 土壤濕度偏差HE隸屬度函數

圖5 光照強度LE隸屬度函數

圖6 輸出比例電磁閥開度U隸屬度函數
建立了輸入輸出模糊變量子集后,根據表4,對智能模糊滴灌控制系統制定模糊控制表。在SIMULINK模糊控制器Rule Editor中添加模糊控制規則,共25條規則。在Rule Editor編寫的規則列表如圖7所示。

圖7 智能滴灌模糊控制系統模糊控制規則
模糊規則制定完成后,在SIMULINK環境下建立滴灌控制系統模糊控制仿真結構圖,并對其系統進行仿真實驗。仿真結構如圖8所示,仿真曲線如圖9所示。

圖8 滴灌系統模糊控制仿真結構圖

圖9 滴灌系統模糊控制仿真曲線
針對滴灌系統,為了對比模糊控制與PID控制的控制效果,特對滴灌系統做了PID控制仿真。其中,PID控制仿真結構如圖10所示,PID控制仿真曲線如圖11所示。

圖10 滴灌系統PID仿真結構圖

圖11 滴灌系統PID控制仿真曲線圖
對比圖9和圖11仿真曲線可以看出,模糊控制比PID控制具有響應速度快,超調量小,控制精度高和穩健性強等特點。
4 結 論
本論文分析了滴灌控制系統的組成,設計了基于模糊控制算法的智能滴灌控制系統。針對灌水器滴灌系統,制定了模糊控制規則,并在SIMULINK環境下建立了模糊控制和PID控制系統結構圖,通過兩個系統的仿真曲線比較,模糊控制系統具有控制響應速度快,超調量小,穩健性強等特點。
[1] 姜 源,鄭玉麗.基于無線傳感器網絡的智能大棚控制系統[J].現代電子技術,2011,(11).
[2] 李書巳.模糊控制基本原理與實現方法研究[J].數字技術與用,2015,(5):7.
[3] 賴真華,芮延年.隨機出水系統的水位模糊控制與仿真研究[J].裝備制造技術,2014,(12):28-29,32.
[4] 張 濤.鍋爐水位實驗系統PCI總線改進及模糊控制組態仿真[J].電氣自動化,2015,(2):90-92.
[5] 陳慕君,張劍鋒. 溫室大棚溫濕度檢測系統的模糊控制器設計[J].科技創新與生產力,2012,(9):101-103.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32