永磁同步伺服電機的智能控制
2017-03-17 22:24:49梁賽沈子龍
科學與財富 2017年1期
關鍵詞:控制
梁賽 沈子龍
摘 要:永磁同步電機因為其優越的性能正得到越來越廣泛的應用, 并在高性能伺服系統中逐步取代直流電機和異步電機。伺服系統對電機控制性能有很高的要求, 本文對伺服系統中永磁同步電機控制的智能控制問題進行了介紹。
關鍵詞:永磁同步;伺服電機;控制
引言
發展和提高永磁同步電機的制造水平, 開發相應的高性能控制器產品, 提高資源的利用率和附加產值應該是我國未來的一個發展方向。
一、閉環調節器的控制
永磁同步電機的數學模型與異步電機相比,簡單了不少,但仍具有非線性,強耦合,多變量等特點,尋求比普通PID 調節器更優良的控制策略是提高交流伺服系統性能的有效途徑之一。
(1) 基于現代控制理論的控制策略
基于現代控制理論的電機控制方法有許多,典型的如滑模變結構控制,自適應控制等。其中,自適應控制能夠抑制系統運行時參數變化的影響,獲得有用的模型信息,使控制器的控制參數能夠得到自動調整。但這些方法均存在兩個問題,一是模型復雜,運算繁瑣; 二是校正和辨識的時間較長,實時性不佳。
此外,還有許多現代控制理論被用到轉速控制器設計中,包括自適應逆推、反饋線性化、魯棒控制等。
( 2) 基于智能思想的控制策略
典型的智能控制方法如模糊控制是模糊數學與控制理論相結合的產物。現實中,有些被控對象是難以建立精確的數學模型的,這時,使用模糊控制的方法是一種非常不錯的選擇。當前,在永磁同步電機的控制方面的,模糊控制的應用與研究已取得了許多成果,在電機的控制領域,仍有不少與模糊控制相結合的控制方法出現。
神經網絡控制也是一種基于智能思想的控制策略,其并行處理,分布存儲,自組織,自學習及神經計算能力,使其成為一種很有前途的控制方法,目前已有不少文獻對此進行研究。
二、電機自身的控制
交流伺服系統中對電機自身的控制方法主要有: 壓頻控制、磁場定向控制,解耦控制與直接轉矩控制。
( 1) 壓頻控制
壓頻控制是一種開環控制方法,不需要電機位置、速度等反饋信息,其控制方法簡單,無復雜的控制算法,方便實現。缺點是無法獲取電機的電磁轉矩和工作狀態。因此只適用于一般的水泵和風機等場合。
( 2) 矢量控制
矢量控制是德國西門子公司的F.Blashcke 在七十年代提出的。該方法的主要思想是將三相磁鏈矢量、電壓矢量、電流矢量,通過坐標變換為兩相矢量。目前,矢量控制的方法在理論上與應用上都十分成熟,具體包括: 最大轉矩與電流比控制、id控制、弱磁控制、最大輸出功率控制、cosφ = 1 控制、恒磁鏈控制等。
在所有的控制方法中,使id = 0 的控制方式最為簡單,它能夠將三相電流轉變為兩相dq 電流,然后對dq 電流分別進行控制,使得只存在q 軸電流,進而實現永磁同步電機的穩態解耦。這里的q 軸電流就相當于直流電機的控制回路的轉子電樞電流。這樣,對永磁同步電機的控制就相當于對直流電機的控制。這種控制方法結構相對簡單,計算量小。缺點是當電機負載增加時,電機的功率因數會降低,而定子電壓則會升高,所以要讓電機正常運行,其逆變器必需要有足夠的容量。
(3) 解耦控制
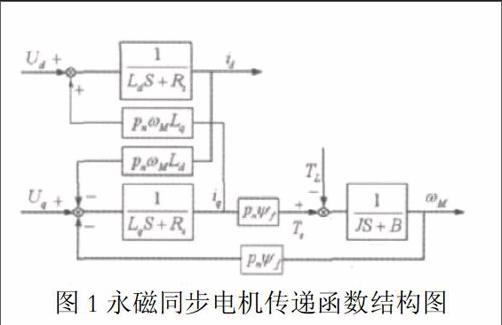
對永磁同步電機的電壓方程進行相應的拉氏變換,用結構圖表示其傳遞函數見圖1所示。從圖中可以明顯的看出,永磁同步電機的dq 軸分量相互耦合,不能實現Ud和Uq對id和ωM分別的控制,因此,要實現系統高性能控制的關鍵在于解耦控制。
矢量控制可以實現永磁同步電機的穩態解耦,前提是定子磁鏈必須到達穩定狀態,但動態過程仍相互耦合,其動態響應不能令人滿意。
對永磁同步電機的控制而言,已有許多解耦控制方法出現: 如將永磁同步電機解耦成二階線性轉速子系統和一階線性磁鏈子系統,進而實現轉速和磁鏈動態解耦控制; 針對dq 坐標系下提出的反饋解耦控制方案,在負載轉矩波動下,對指令速度有良好的轉速跟蹤性能; 還可以對永磁同步電機數學模型進行可逆性求解,得出逆系統進而構造相應神經網絡,實現永磁同步電機轉速和定子磁鏈的動態解耦。
三、信號反饋技術
通常要獲得更高性能的控制效果,交流伺服系統需要運行于閉環控制狀態下,因而需要獲得電機轉子的位置、速度信息等,一般的方法是在電機轉軸上安裝光電編碼器或測速電機等。但裝上傳感器,會出現許多問題: 伺服產品成本增加; 由于同心度問題,轉子位置出現偏差; 連接線纜增加,使得系統容易受到干擾,系統可靠性降低; 電機的體積增大; 易受到振動、濕度和溫度等條件的影響。
為了克服這些缺陷,無位置/速度傳感器伺服系統的研究成了當前的熱點,根據容易測出的定子電壓、定子電流等物理量,通過相應的算法,估算出當前轉子的位置與轉速信息。無速度傳感器控制策略大體上可分為3 類:
一類是根據永磁同步電機的數據模型來估算的方法,如通過獲得定子電流和電壓后進行直接計算的方法; 通過比較電壓計算值與實測值得到轉子位置的電感變化估算方法; 反電動勢積分法; 擴展反電動勢法等。
另一類是基于各種觀測器模型的閉環算法,如模型參考自適應、降階狀態觀測器、擴展卡爾曼濾波器、全階狀態觀測器、滑模觀測器等。這類方法是通過永磁同步電機的電壓方程推算出感應的反動勢,再從中提取出位置信號,適用于高速運行狀態下的位置與速度估算,當電機轉速較低時,反電動勢信噪比小,不能準確估算轉子和位置。
還有一類是以基于電機理想特性的算法,如高頻信號注入法和低頻信號注入法。高頻信號注入法不依賴于任何電機的參數和運行的情況,因而可以工作于低速運行狀態,但電機必需是凸極性的。而低頻信號注入法要求電機不能具有凸極效應,而且電機轉子不能有較大的轉動慣量,否則檢測精度會變差。
四、結束語
本文給出了永磁同步電機運行的兩種基本模式,并將其控制策略歸納為三個方面。針對這三個方面,分別進行了綜述性的介紹。為了滿足各種場合應用的需求,需要將各種控制方法相互滲透,以提高當前伺服系統的整體性能。永磁同步電機控制系統作為一個多學科交叉的研究領域,其研究方向還可以從其它方面更進一步: ① 優化的直接轉矩控制技術; ② 定子電流死區補償技術; ③ 無位置/速度傳感器控制技術; ④ 多種方法相結合的閉環調節器控制策略的研究; ⑤ 電機轉子初始位置檢測等。
參考文獻:
[1]張銳,白連平.永磁交流伺服電機控制系統的研究[J].電氣技術.2011(03)
[2]謝玉春,楊貴杰,崔乃政.高性能交流伺服電機系統控制策略綜述[J].伺服控制.2011(01)
[3]辛小南,賀莉,王宏洲.永磁同步電動機交流伺服系統控制策略綜述[J].微特電機.2010(02)
[4]葛繼科,邱玉輝,吳春明,蒲國林.遺傳算法研究綜述[J].計算機應用研究.2008(10)
[5]陳鵬展.交流伺服系統控制參數自整定策略研究[D].華中科技大學2010
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 17:15:21
商業會計(2016年13期)2016-10-20 15:43:05
中國科技博覽(2016年19期)2016-10-19 13:43:31
中國科技博覽(2016年19期)2016-10-19 12:09:22
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
科學與財富(2016年28期)2016-10-14 20:57:11
大眾理財顧問(2016年9期)2016-10-11 17:10:17
