基于PSO的自適應反推永磁同步電動機DTC控制方法研究
2017-03-09 07:22:49徐艷平張保程馬靈芝
微特電機 2017年1期
關鍵詞:優化
徐艷平,張保程,周 欽,馬靈芝
(西安理工大學,西安 710048)
基于PSO的自適應反推永磁同步電動機DTC控制方法研究
徐艷平,張保程,周 欽,馬靈芝
(西安理工大學,西安 710048)
針對傳統直接轉矩控制(DTC)中的磁鏈轉矩脈動大、逆變器開關頻率不恒定的缺點,提出了基于微粒群優化(PSO)的自適應反推直接轉矩控制方法,該方法中根據永磁同步電動機(PMSM)直接轉矩控制原理設計了磁鏈轉矩自適應反推控制器,并針對控制器中參數較多、不易調節的問題,引入微粒群優化算法優化自適應反推控制器中的參數。仿真結果證明了自適應反推控制器參數可通過微粒群優化方法得到,與傳統直接轉矩控制方法相比,基于PSO的自適應反推直接轉矩控制方法可明顯減小磁鏈和轉矩脈動,使逆變器具有恒定的開關頻率。
永磁同步電動機;自適應反推控制;微粒群優化算法;直接轉矩控制
0 引 言
直接轉矩控制(DTC)由于系統結構簡單、轉矩響應迅速等優點,目前已經用于永磁同步電動機(PMSM)中[1-2]。但直接轉矩控制方法中磁鏈和轉矩均采用滯環控制,并且只有有限個電壓矢量可供選擇,使得直接轉矩控制具有磁鏈轉矩脈動大、逆變器開關頻率不恒定的缺點。由于永磁同步電動機本質上是一個高階、多變量和強耦合的非線性系統,傳統的線性控制方法不能解決輸入和輸出的獨立控制等問題,不能滿足高性能調速系統的控制要求。針對上述問題,國內外的學者將非線性理論應用到永磁同步電動機控制系統中。
目前應用到永磁同步電動機中的非線性控制方法主要有反饋線性化方法[3]、逆系統方法[4]、反推控制方法[5]、無源控制方法[6]、自抗擾控制方法[7]、變結構控制方法[8]等。其中,反推控制方法[9-11]適用于可狀態線性化或具有嚴參數反饋的不確定非線性系統,在設計不確定系統(特別是當干擾或不確定不滿足匹配條件時)魯棒控制或自適應控制器方面具有優勢。同時在實際電機系統運行時定子電阻和粘滯摩擦系數都會隨著定子的溫升而改變,并且負載擾動會影響系統的控制精度,因此為改善傳統直接轉矩控制系統性能,減小電機參數變化對系統性能的影響,本文針對永磁同步電動機,提出了一種自適應反推DTC方法,由于該方法中的自適應反推控制器存在較多參數,不易調節,同時參數的選取對于系統的性能具有關鍵作用,因此本文引入微粒群優化算法以實現對自適應反推控制器參數的優化,從而使得控制系統具有較小的磁鏈和轉矩脈動,系統具有較好的動靜態性能。
1 永磁同步電動機自適應反推直接轉矩控制原理
永磁同步電動機在α-β兩相靜止坐標系中的電壓方程:
(1)
式中:uα是定子電壓在α軸上的分量;uβ是定子電壓在β軸上的分量;Rs是定子電阻;iα是定子電流在α軸上的分量;iβ是定子電流在β軸上的分量;ωr是轉子角速度;Ld是電感d軸分量;Lq是電感q軸分量;p是微分算子;θr是轉子角度;ψf是轉子永磁磁鏈;E為電機的反電動勢。
根據式(1)可得到電流和磁鏈模型:
(2)
(3)
式中:ψα是定子磁鏈α軸分量;ψβ是定子磁鏈β是定子磁鏈β軸分量。
永磁同步電動機的電磁轉矩方程、磁鏈方程、機械運動方程分別:
(4)
(5)
(6)
式中:Te是電磁轉矩;ψs是定子磁鏈的平方;p是極對數;J是轉動慣量;TL是負載轉矩;Bm是粘滯摩擦系數。
在永磁同步電動機的直接轉矩控制方法中,控制的目標是轉速、轉矩和磁鏈。定義轉速跟蹤誤差:
(7)
選擇eω為狀態變量,轉速誤差導數根據式(6)可寫作:
(8)
為了使速度跟蹤誤差趨于0,構造李雅普諾夫函數:
(9)
對Vl求導可得:
(10)

(11)
式中:ψsref為參考磁鏈的平方,則 :
(12)
當kω>0時,通過李雅普諾夫穩定性分析可知,速度漸進跟蹤,逐漸平穩。
在實際電機控制系統中,負載轉矩TL是未知的,而且隨著工作環境的變化定子電阻Rs和粘滯摩擦系數Bm也會變化,從而影響系統性能。因此將自適應控制和反推控制相結合,以達到改善這一狀況的目的。
定義定子電阻誤差ΔRs,粘滯摩擦系數誤差ΔRm和負載轉矩的估計誤差ΔTL分別:
(13)

直接轉矩控制中的核心控制量是電磁轉矩和定子磁鏈,需要控制電磁轉矩和定子磁鏈準確跟蹤給定值,定義轉矩誤差eT和定子磁鏈eψ誤差分別:
(14)
(15)

(16)
對于新的子系統,重新構造李雅普諾夫函數:
(18)
式中:γ1為定子電阻自適應增益;γ2為粘滯摩擦系數自適應增益;γ3為負載轉矩自適應增益,且均為大于零的常數。
對式(18)求導,可得:
(19)
將式(15)、式(16)和式(17)代入式(19)中,并考慮到將自適應控制與反推控制相結合,取實際控制如下:
(20)
(21)
式中:kT,kψ分別為轉矩和磁鏈調節系數,且均為大于0的常數。
將式(20)和式(21)代入式(19),化簡可得:
設計定子電阻,粘滯摩擦系數和負載轉矩的自適應律:
(23)
把控制式(20)、式(21)和自適應律式(23)代入式(22)中,可得:
(24)
由于kω,kT,kψ均為大于0的常數,可使式(24)恒小于0,根據李雅普諾夫穩定性定律,則系統可以漸進穩定。
根據式(20)、式(21)和式(23)不僅可以使永磁同步電動機系統達到對轉速、轉矩和磁鏈的準確控制,還可以抑制定子電阻Rs、粘滯摩擦系數Bm和負載轉矩TL的變化對系統性能的影響,從而保證系統具有較強的魯棒性。
2 微粒子群算法優化自適應反推控制器參數
在自適應反推控制器中共有轉速調節系數、轉矩調節系數、磁鏈調節系數、定子電阻自適應增益、粘滯摩擦自適應增益和負載轉矩自適應增益共6個可調參數,參數取值直接影響系統的性能。在這6個參數中磁鏈調節系數對系統性能影響較小,所以本文采用微粒群算法對自適應反推控制器的5個參數進行優化,即優化轉矩調節系數kT、轉速調節系數kω、定子電阻自適應增益γ1、粘滯摩擦自適應增益γ2和負載轉矩自適應增益γ3。
微粒群優化算法是把個體看做N維搜索空間中的某一個微粒,這個微粒以一定的運行速度進行飛行。微粒與群體的速度會進行實時地調整,標準微粒群的速度更新方程:
(25)
式中:vj(t)是微粒j位于第t代的速度;w是慣性因子;c1是認知系數;r1是范圍在(0,1)間的隨機數;pj(t) 是微粒j的歷史最優位置;xj(t) 是微粒j位于第t代的位置;c2是社會系數;r2是范圍在(0,1)間的隨機數;pg(t) 是群體歷史最優位置。
由于pj(t)是微粒j的歷史最優位置,對于目標為最小化為的控制系統而言,目標函數值越小,其對應適應值就越好,那么pj(t)更新規則:
(26)
而群體歷史最優位置則定義:
(27)
式中:n為種群所包含的微粒個數。為了保證微粒群算法的穩定性,定義vmax為速度最大值,目的是以限制微粒j移動速度的快慢,即:
(28)
微粒j的進化方程:
(29)
根據式(25)設定微粒群優化中微粒的運行速度,由于w是一個非負數,對算法的性能影響很大,為避免出現局部最優值,本文采用逐漸遞減公式:
(30)
式中:j為迭代第幾次,nmax _length為最大迭代次數。這是因為隨著迭代的進行,所取值逐漸接近最優值,同時微粒速度應隨之減少。
認知系數c1和社會系數c2為一般正數或零,通常令c1=c2=2,r1和r2均為(0,1)分布的隨機數,本文中微粒數n=30,微粒迭代次數N=40。
目標函數采用
(31)
如果出現超調則采用懲罰函數
(32)
式中:eω(t)為轉速誤差,tu為轉速波形的上升時間,w1=103為權重系數。
基于微粒群優化的PMSM自適應反推DTC原理框圖如圖1所示。
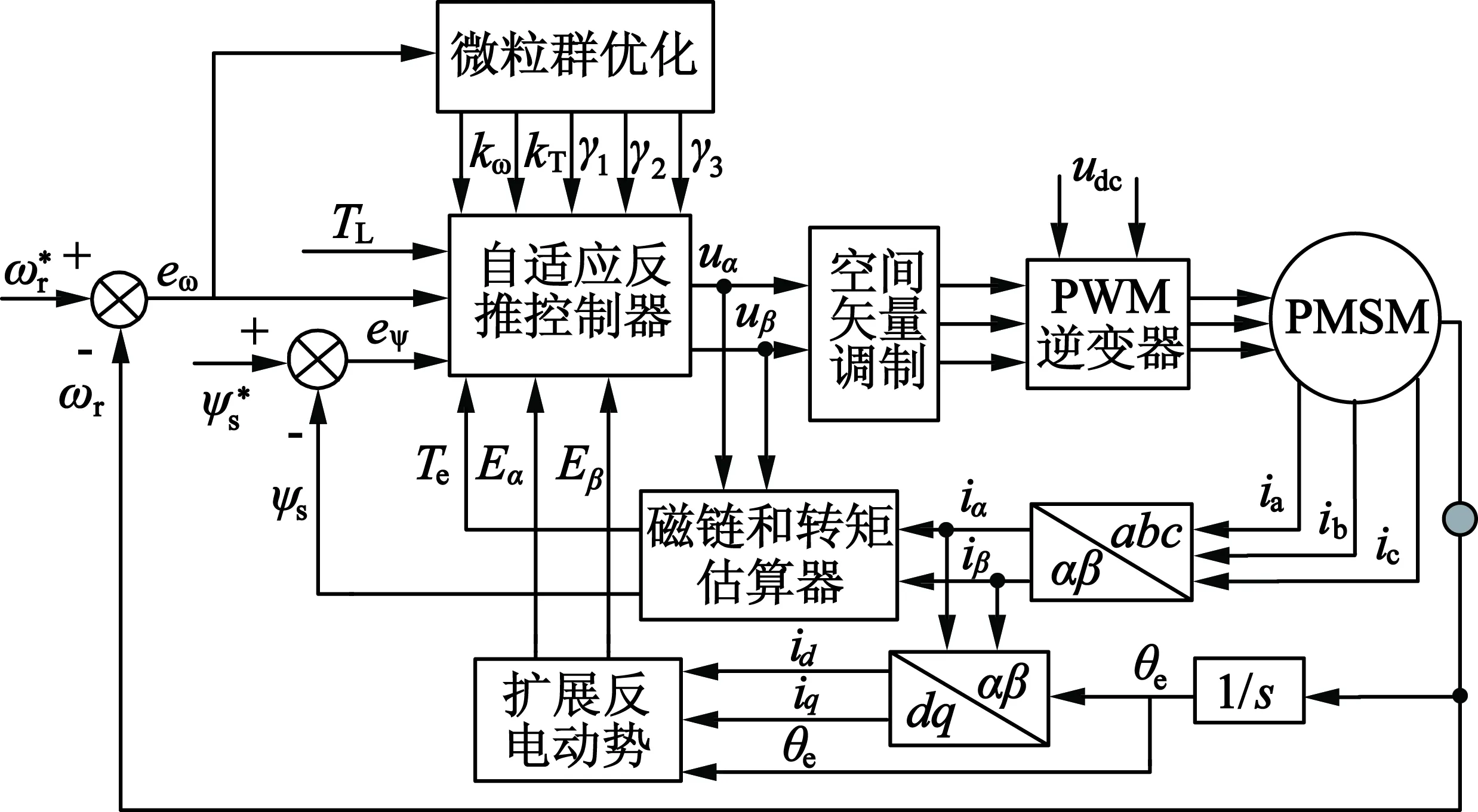
圖1 基于微粒群優化的PMSM自適應反推DTC原理框圖
3 仿真結果分析
為了證明基于微粒群算法的自適應反推直接轉矩控制方法的可行性和有效性,針對一臺永磁同步電動機進行了仿真研究,同時也進行了傳統直接轉矩控制系統的仿真研究。仿真中的永磁同步電動機參數為:定子電阻0.2Ω;永磁體磁鏈0.24Wb;d軸電感8.5mH;q軸電感8.5mH;極對數為4;轉子慣量1.23×10-3kg·m2。所得到的仿真結果如圖2~圖5所示。
圖2是微粒群優化過程中kω和kT迭代選出最優值的走勢調節圖,星點表示每次迭代得到的歷史最優值。從圖2可以看出,兩個參數取值在逐漸變化,在達到最大迭代次數之前,參數取值出現重疊,同時目標函數值達到最小,此時的參數即為kω和kT的最優值。圖3是微粒群優化過程中γ1,γ2和γ3的取值走勢圖,星點表示每次迭代得到的參數歷史最優值。從圖3中可以看出,隨著迭代次數的增加,參數取值逐漸改變,達到最大迭代次數時參數出現重合點,即參數取得最優值。最終通過PSO算法得出自適應反推控制器的調節參數:kω=955,kT=41399,kψ=1200。自適應增益:γ1=0.000009536,γ2=0.000 000 334,γ3=0.000 059 51。

圖2 微粒群算法優化過程中kω和kT的取值走勢

圖3 微粒群算法優化過程中γ1,γ2和γ3取值走勢
將微粒群優化算法得到的參數代入自適應反推控制系統中,當給定轉速為1 000r/min空載起動穩定運行后,0.15s時負載轉矩從0突增至2N·m情況下,傳統直接轉矩控制的仿真波形如圖4所示,基于微粒群參數優化的自適應反推直接轉矩控制系統的仿真波形如圖5所示。從圖4和圖5可以看出,當轉速給定為1 000r/min時,傳統DTC和基于PSO的自適應反推DTC均可以達到給定轉速,二者的起動時間相差無幾。當電機穩定運行于1 000r/min,在0.15s時將負載轉矩從0突增至2N·m時,轉速始終穩定運行于1 000r/min,這說明基于微粒群優化算法的自適應反推DTC具有與傳統DTC相同的動態響應性能。從傳統DTC和基于PSO的自適應反推DTC的轉矩和磁鏈波形可以看出,傳統DTC存在著明顯的轉矩和磁鏈脈動,轉矩脈動范圍大約在±1N·m,而基于PSO的自適應反推DTC系統轉矩和磁鏈脈動不明顯。這是由于傳統DTC磁鏈和轉矩采用滯環控制,同時只在6個有效電壓矢量和2個零矢量中選擇最終電壓矢量,所以存在明顯的轉矩和磁鏈脈動,而基于PSO的自適應反推DTC由于采用了空間矢量脈寬調制技術,可選電壓矢量范圍為任意大小和任意方向的電壓矢量,所以轉矩和磁鏈脈動明顯減小。
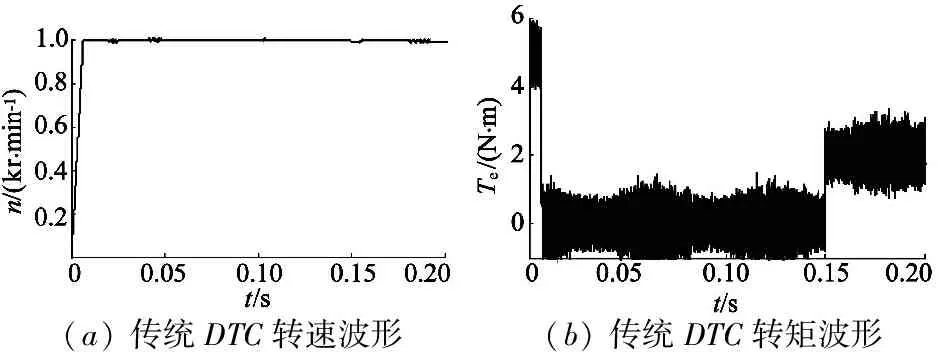
(a)傳統DTC轉速波形(b)傳統DTC轉矩波形

(c) 傳統DTC轉磁鏈波形

(a)基于PSO的自適應反推DTC轉速波形(b)基于PSO的自適應反推DTC轉矩波形

(c) 基于PSO的自適應反推DTC磁鏈波形
由上述仿真波形可以看出,采用微粒群算法可以優化出自適應反推控制器的參數,將優化出的參數代入到自適應反推DTC控制系統中,可以明顯減小傳統DTC系統中的轉矩和磁鏈脈動,同時由于采用了空間矢量脈寬調制技術,也可使逆變器具有恒定的開關頻率,由于自適應反推控制器存在多個可調參數,利用微粒群算法優化參數大大節省了調節參數的時間,對系統的實現具有重要意義。
4 結 語
本文針對永磁同步電動機傳統直接轉矩控制,提出了一種基于微粒群優化的自適應反推DTC方法,仿真結果證明了采用微粒群算法可以優化自適應反推控制器中的參數,與傳統DTC方法相比,基于PSO的自適應反推DTC方法明顯減小了磁鏈和轉矩脈動,同時具有和傳統DTC相同快速的動態響應,并使逆變器具有恒定的開關頻率。由于自適應反推控制器方法中參數較多,難以調節,采用微粒群算法可以直接優化出參數,大大節省了系統調試時間,這對永磁同步電動機自適應反推直接轉矩控制系統的實現具有重要意義。
[1]ZHONGL,RAHMANMF,HUWY,etal.Analysisofdirecttorquecontrolinpermanentmagnetsynchronousmotordrive[J].IEEETransactionsonPowerElectronics,1997,12(3):528-536.
[2]ZHONGL,RAHMANMF,HUWY,etal.Adirecttorquecontrollerforpermanentmagnetsynchronousmotordrives[J].IEEETransactionsonEnergyConversion,1999,14(3):637-642.
[3] 毛潔,周揚忠.永磁同步電動機反饋線性化控制系統設計研究[J].電力電子技術,2013,47(3):96-98.
[4] 孫曉東,朱熀秋.基于逆系統理論的永磁同步電動機解耦控制[J].微電機,2009,42(4):17-20.
[5] 劉棟良,鄭謝輝,崔麗麗.無速度傳感器永磁同步電機反推控制[J].電工技術學報,2011,26(9):67-72.
[6]MOCANUR,ONEAA.PassivitybasedtorquecontrolofPMSMusedinelectricalvehicles[C]//2015 19thInternationalConferenceonSystemTheory,ControlandComputing(ICSTCC),2015:803-810.
[7]ZHANGJinliang,KANGLongyun.Asensorlessvectorcontrolsystemofpermanentmagnetsynchronousmotorbasedonlineactivedisturbancerejectioncontroller[C]//InternationalConferenceonElectricalMachinesandSystem.IEEE,2015:1140-1144.
[8]NIUZhiwei,WANJianru,GEAng,etal.ResearchonslidingmodevariablestructurerotationalspeedobserverusedinPMSM-DTC[C]//2011 4thInternationalConferenceonPowerElectronicsSystemandApplication(PESA).IEEE,2011:1-5
[9] 楊俊華,吳捷,胡躍明.反步方法原理及在非線性魯棒控制中的應用[J].控制與決策,2002,17(S1):641-647.
[10]REBOUHS,KADDOURIA,ABDESSEMEDR,etal.Adaptivebacksteppingspeedcontrolforapermanentmagnetsynchronousmotor[C]//2011InternationalConferenceonManagementandServiceScience.IEEE,2011:1-4
[11]RUDRAS,BARAIRK,MAITRAM,etal.Robustadaptiveintegralbacksteppingcontrolanditsimplementationonpermanentmagnetsynchronousmotor[C]//IEEEIndiaConference.IEEE,2012:1072-1077.
ResearchonAdaptiveBacksteppingDTCofPermanentMagnetSynchronousMotorBasedonParticleSwarmOptimization
XU Yan-ping,ZHANG Bao-cheng,ZHOU Qin,MA Ling-zhi
Becausetraditionaldirecttorquecontrol(DTC)methodhasdisadvantagesoflargefluxlinkageandtorqueripplesandhasinconstantswitchingfrequency,anadaptivebacksteppingDTCmethodbasedonparticleswarmoptimization(PSO)algorithmwasproposed.InthismethodanadaptivebacksteppingcontrollerforfluxlinkageandtorquewasdesignedaccordingtoDTCprinciplesofpermanentmagnetsynchronousmotor(PMSM)andthePSOalgorithmwasusedtooptimizeadaptivebacksteppingcontrollerparametersinordertoadjustthecontrollerparameters.SimulationresultsshowthatcontrollerparameterscouldbeoptimizedthroughthePSO,andcomparedtothetraditionalDTC,theproposedmethodcoulddecreasefluxlinkageandtorquerippleslargelyandmaketheinverterhaveconstantswitchingfrequency.
permanentmagnetsynchronousmotor;adaptivebacksteppingcontrol;particleswarmoptimization(PSO);directtorquecontrol
周慧(1987-),男,碩士研究生,研究方向為電機控制。
2015-12-10
國家自然科學基金項目(51107098)
TM341;TM
A
1004-7018(2017)01-0062-05
(Xi’anUniversityofTechnology,Xi’an710048,China)
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45