基于擴張狀態觀測器的SMPMSM無模型控制
2017-03-09 07:31:02李紅梅
微特電機 2017年1期
周 慧,李紅梅
(合肥工業大學,合肥 230009)
基于擴張狀態觀測器的SMPMSM無模型控制
周 慧,李紅梅
(合肥工業大學,合肥 230009)
電動汽車永磁同步電動機(PMSM)驅動系統運行在復雜多變的工況條件下,由此引起的電機參數不確定性將直接影響基于經典PI控制的PMSM驅動系統性能。為此,引入基于數據驅動的無模型控制,同時為了簡化控制器結構和提升控制精度,創新性地將無模型控制與擴張狀態觀測器(ESO)設計相結合,首先建立面裝式永磁同步電動機(SMPMSM)的超局部模型,再設計SMPMSM交、直軸定子電流的無模型控制器,架構基于ESO的無模型控制的SMPMSM驅動系統。最后,通過系統建模和與基于經典PI控制的SMPMSM驅動系統的仿真對比研究,分析建議的SMPMSM驅動系統的動、靜態性能及其抗參數變化的魯棒性再給出結論。
面裝式永磁同步電動機驅動系統;參數不確定;擴張狀態觀測器;超局部模型;無模型控制
0 引 言
永磁同步電動機(PMSM)具有效率高、可靠性強、功率密度大、體積小等優點,適合作為電動汽車驅動電機,其驅動控制技術是電動汽車高效安全可靠運行的保證。對于電動汽車PMSM驅動系統,不僅要求系統兼具良好的動態和穩態性能,同時要求系統具有抗參數變化的魯棒性[1-3]。
電動汽車PMSM因受運行工況的影響存在參數不確定性,受系統運行溫度的影響,電樞電阻將會出現高達40%的變化;由于鐵磁材料的磁導率隨溫度變化,磁路飽和程度呈現非線性特性,定子電感也會在較大范圍內變化,永磁體磁鏈可能會出現高達20%的變化[4]。
電機參數不確定性的存在將直接影響基于PI控制的PMSM驅動系統性能,輕則導致系統性能下降,重則引起系統運行失穩。有效解決方案之一是在系統運行過程中,通過電機參數的在線辨識實現PI控制器參數與前饋解耦電壓的自適應更新,但該方案存在計算量較大,系統實現較繁瑣的技術不足,且電機參數的辨識精度直接影響系統的運行性能及穩定性[5]。
基于PMSM數學模型設計擾動觀測器是另一種可供選擇的解決方案,其實現思路是設計擾動觀測器在線估計出由電機參數變化所引起的擾動電壓,再通過前饋補償抵消該擾動電壓,提高系統的動靜態性能與魯棒性。但是,該方案存在控制結構復雜,且擾動觀測器設計依賴于電機數學模型,無法解決由于實際存在的逆變器非線性對系統性能產生的負面影響,難以獲得良好的實時控制效果[6]。
針對具有參數不確定性和未建模動態的非線性系統,不依賴于系統數學模型,僅利用系統輸入和輸出數據的無模型控制自上世紀七十年代末被提出以來,不斷獲得研究關注且已取得了長足的發展,如韓京清研究員提出的自抗擾控制(ADRC)、侯忠生教授提出的無模型自適應控制和MichelFliess提出的無模型控制(ModelFreeControl,MFC)等[7-10]。
MFC是基于系統的輸入和輸出數據建立系統的超局部模型再進行控制器的設計,達到僅利用系統輸入輸出數據完成系統實時控制的目的。無模型控制對系統存在的內、外擾動、未建模動態及測量噪聲具有較強的魯棒性,而且控制器設計更為簡單有效,無需被控對象的模型階次與參數信息,控制器結構簡單,且具有整定參數少的技術優勢[10]。為了實現具有參數不確定性的非線性系統的無模型控制,常采用代數法在線估計表征系統包含已知及未知部分的F,基于代數法的F估計中,需要計算出系統含噪聲輸出信號的一階微分,F的估計精度與系統采樣時間和采樣數目有關,目前主要存在計算復雜耗時的不足。
ADRC的自抗擾控制器由微分跟蹤器(TD)、擴張狀態觀測器(ESO)和非線性狀態誤差反饋控制律(NLSEF)組成,僅需要系統的輸入和輸出數據,控制思想清晰。通過擴張狀態觀測器的設計實現系統狀態變量的估計及計及模型不確定和內外擾動的擴張狀態的估計,并通過反饋實現補償,提升系統的抗擾動能力。但是TD、ESO和NLSEF存在需要整定參數較多,控制器設計難度較大,難以實現系統最優控制的不足[11-14]。
為了實現具有參數不確定的面裝式永磁同步電動機(SMPMSM)驅動系統的高性能控制,論文創新性地將MichelFliess提出的無模型控制和韓京清提出的自抗擾控制相結合,設計SMPMSM驅動系統無模型控制器,設計思路是保留無模型控制器結構簡單、待整定參數少的優點,設計ESO估計PMSM驅動系統超局部模型中表征系統已知和未知部分的F,旨在簡化F估計的同時,提高估計精度。在上述研究的基礎上,架構基于d,q軸定子電流無模型控制的SMPMSM驅動系統,通過系統仿真研究證實SMPMSM驅動系統無模型控制方案的可行性和有效性。
1 考慮電機參數不確定和未建模動態的SMPMSM的數學模型
考慮電機參數不確定和未建模動態的影響,在同步旋轉的d-q軸坐標系下SMPMSM的定子電壓方程可表示[15]:
(1)
電磁轉矩表達式:
(2)
式中:ud,uq表示d,q軸定子電壓;id,iq表示d,q軸定子電流;ωe表示電角速度;L表示電機d,q軸電感;R為定子電阻;ψf表示永磁體磁鏈;p表示極對數;下標“o”表示電機的標稱參數。Δud,Δuq,ΔTe表示由于電機參數變化和磁通諧波以及未建模動態引起的不確定量,其表達式:
(3)
(4)
式中:ΔR=R-Ro,ΔL=L-Lo,Δψf=ψf-ψfo,εd,εq,εTe表示未建模動態引起的不確定量。
SMPMSM的機電運動方程:
(5)
式中:J為電機轉子轉動慣量,ωm為機械角速度,且滿足ωe=pωm,TL為負載轉矩。
選擇id,iq和ωe為狀態變量,聯立式(1)、式(2)和式(5),構成考慮電機參數不確定和未建模動態的SMPMSM數學模型。
2 基于擴張狀態觀測器的SMPMSM無模型控制
分析考慮電機參數不確定和未建模動態的SMPMSM數學模型,經典的PI控制難以獲得系統良好的動靜態性能。為此,論文創新性地將無模型控制引入至PMSM驅動系統,旨在實現系統控制性能和魯棒性的全面提升。
首先基于系統的輸入和輸出數據,建立SMPMSM的超局部模型:
(6)
式中:αd,αq分別表示SMPMSM定子d,q軸電壓系數;Fd,Fq包含了系統已知部分及未建模動態和參數不確定性等未知部分。
基于SMPMSM的超局部模型,設計無模型控制器,經推導獲得SMPMSM定子d,q軸參考電壓的表達式:
(7)
針對SMPMSM的超局部模型,設計定子d,q軸擴張狀態觀測器,d軸擴張狀態觀測器可表示:
(8)

(9)
式中:fal(e,α,δ)為最優綜合控制函數;e是誤差信號;α是非線性因子;δ是濾波因子。
q軸擴張狀態觀測器的設計思路與d軸相同,可表示:
(10)
設計完成的基于擴展狀態觀測器(ESO)的定子d,q軸無模型電流調節器框圖如圖1所示。
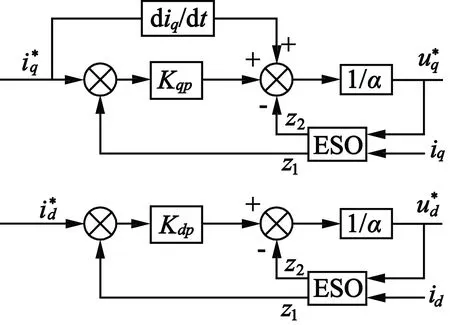
圖1 基于ESO的無模型電流調節器
3 系統仿真研究
基于ESO的無模型電流調節器控制的SMPMSM驅動系統框圖如圖2所示為,為了驗證所提控制方案的有效性,將其與基于經典PI控制的SMPMSM驅動系統進行性能對比分析研究。SMPMSM參數如表1所示,基于擴張狀態觀測器的PMSM無模型控制器參數:Kdp=Kqp=2,αd=αq=909,α1=0.5,α2=0.25,δ=0.01,β1=9 000,β2=400 000,b=909。PI控制器參數:截止頻率ωcc=400Hz,Kp=2.76,Ki=100.53。
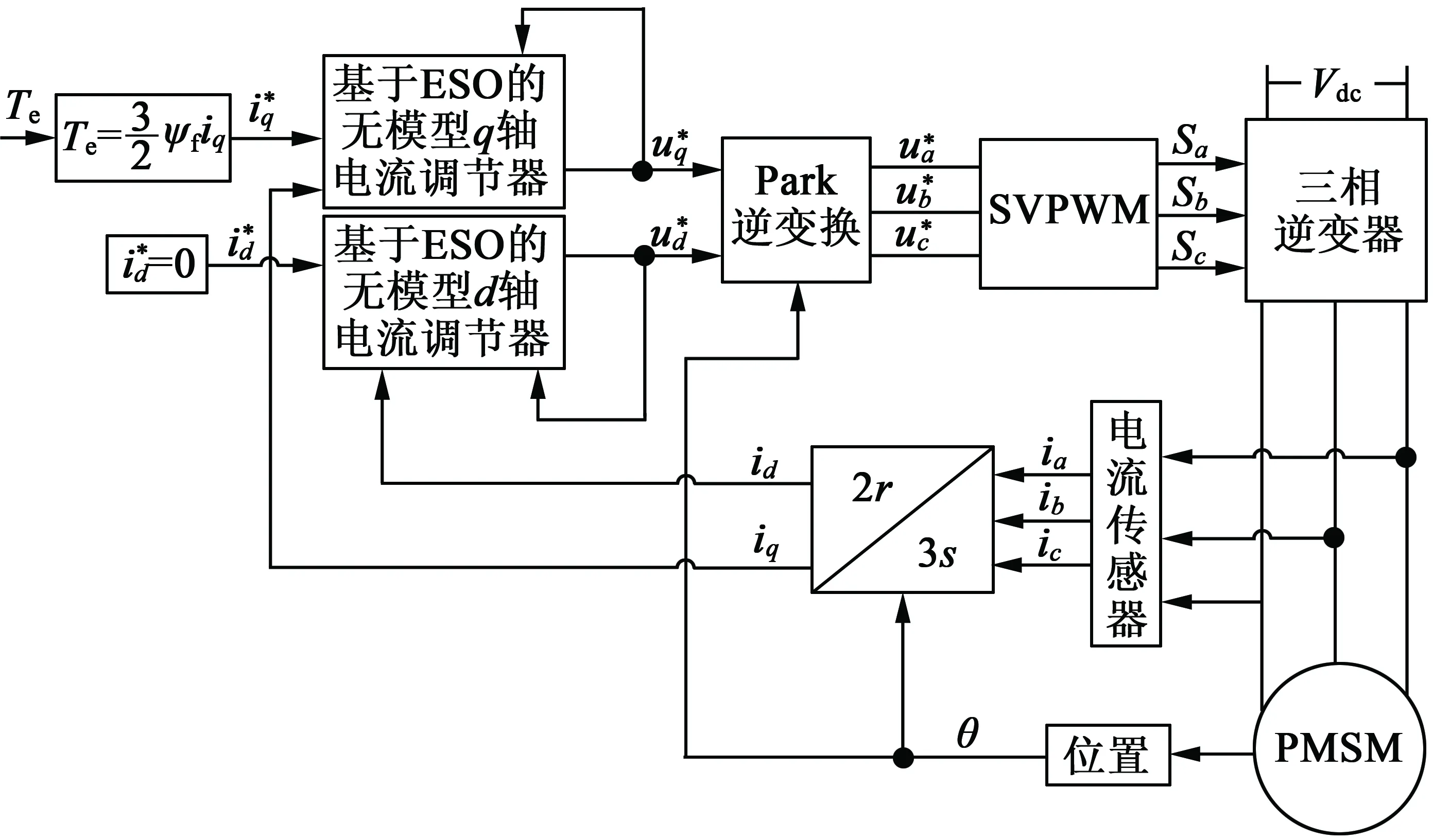
圖2 基于MFC的SMPMSM驅動系統
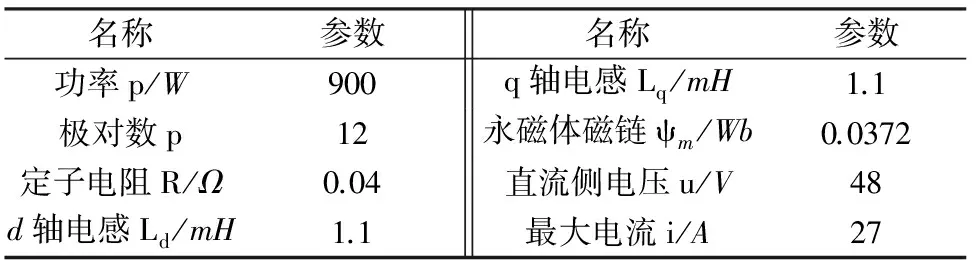
名稱參數名稱參數功率p/W900q軸電感Lq/mH1.1極對數p12永磁體磁鏈ψm/Wb0.0372定子電阻R/Ω0.04直流側電壓u/V48d軸電感Ld/mH1.1最大電流i/A27
基于MATLAB/Simulink軟件建立SMPMSM驅動系統仿真模型并進行系統仿真研究。SMPMSM驅動系統由模擬測功機拖動至300r/min,然后在0.05s時給定指令轉矩15N·m,在0.2s時將指令轉矩減小為10N·m,系統仿真結果如圖3和圖4所示。由圖3(a)和圖4(a)可見,在標稱參數下,建議的基于ESO的MFC的SMPMSM驅動系統輸出轉矩和d,q軸定子電流均能夠準確跟蹤其指令值,系統兼具較好的動態和穩態性能;圖3(b)和圖4(b)表明傳統的PI控制器在標稱參數條件下仍然存在一定的超調,動態性能稍差。
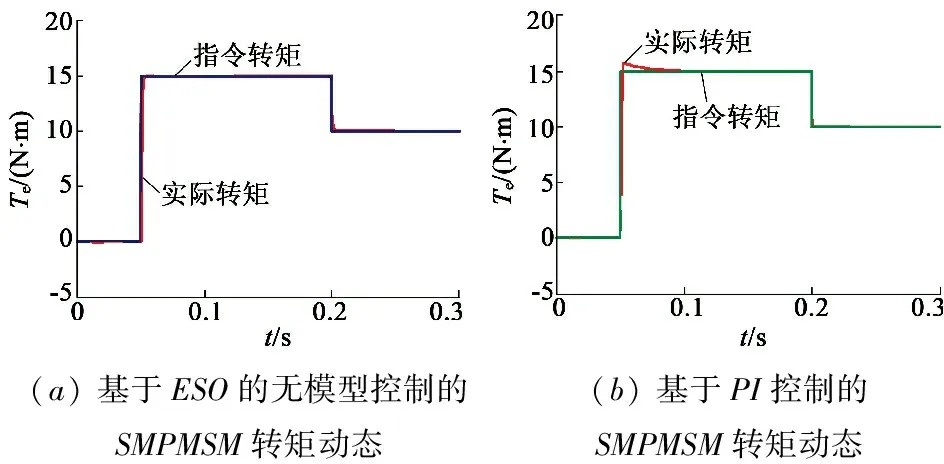
(a)基于ESO的無模型控制的SMPMSM轉矩動態(b)基于PI控制的SMPMSM轉矩動態
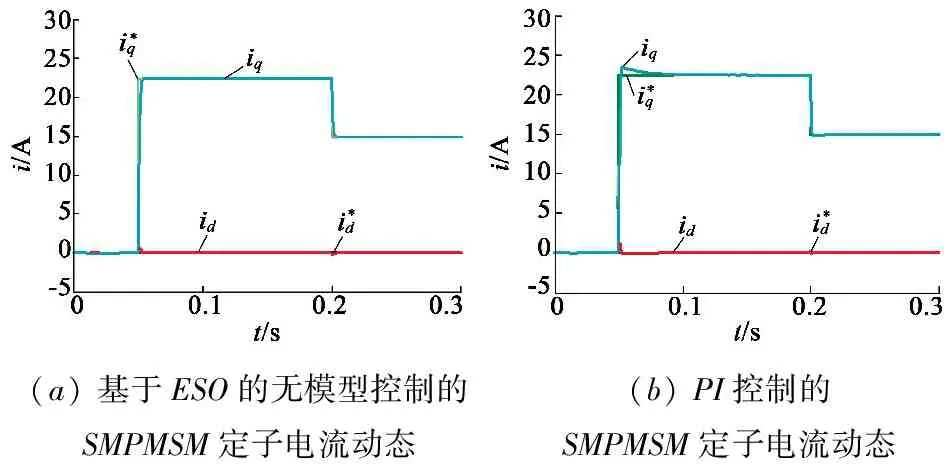
圖3 標稱參數下不同控制方案下的SMPMSM轉矩動態
圖4 標稱參數下不同控制方案下的SMPMSM電流動態
考慮到電機實際運行時參數是變化的,在系統仿真測試中設置永磁體基波磁鏈較標稱參數減小10%,電感較標稱參數減小30%,即ψf=0.033 48Wb,L=0.77mH,SMPMSM驅動系統由模擬測功機拖動至300r/min,然后在0.05s時給定指令轉矩15N·m,在0.2s時將轉矩降為10N·m。
由圖5(a)和圖6(a)可知,建議的SMPMSM驅動系統輸出轉矩動態和定子d,q軸電流仍然能夠快速準確地跟蹤其指令值,具有很好的魯棒性。
由圖5(b)和圖6(b)可知:基于經典PI控制的SMPMSM系統在電機發生參數變化后,電機輸出轉矩和d,q軸定子電流均無法實現對其指令值的快速準確跟蹤,而且系統達到穩態所用時間明顯增大,魯棒性明顯下降。
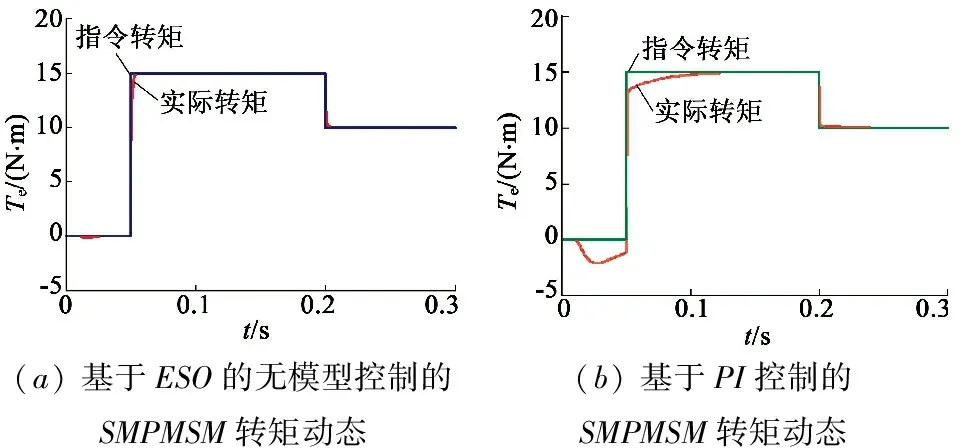
(a)基于ESO的無模型控制的SMPMSM轉矩動態(b)基于PI控制的SMPMSM轉矩動態
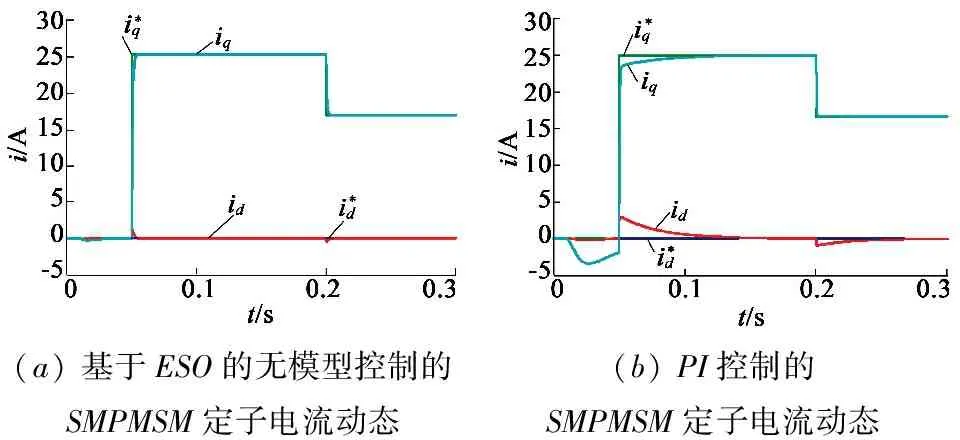
圖5 參數變化時不同控制方案下的SMPMSM轉矩動態
圖6 參數變化時不同控制方案下的SMPMSM電流動態
4 結 語
鑒于復雜多變的工況下電動汽車PMSM驅動系統存在的電機參數不確定性將直接影響基于經典PI控制的PMSM驅動系統性能,甚至引起系統運行失穩。為此,論文基于系統的輸入輸出數據,建立不依賴于SMPMSM數學模型的超局部模型;創新性地將無模型控制器與擴張狀態觀測器的設計相結合,即設計擴張狀態觀測器估計SMPMSM超局部模型中表征系統已知部分和未知部分的F,實現了基于ESO的SMPMSM的無模型控制。系統仿真研究表明:較之經典PI控制的SMPMSM驅動系統,建議的SMPMSM驅動系統具有輸出電流和轉矩動態收斂速度快、超調小、穩態精度高和魯棒性好等技術優勢,兼具良好的動態和穩態性能,可望直接推廣應用于電動汽車驅動電機的實時控制。
[1]NAKAIH,OHTANIH,SATOHE,etal.Developmentandtestingoftorquecontrolforthepermanent-magnetsynchronousmotor[J].IEEETransactionsonIndustrialElectronics,2005,52(3):800-806.
[2]KRISHNANR.Electricmotordrive:“modeling,analysis,andcontrol.uppersaddleriver[M].NJ,UniteStates:Prentice-Hall,2011.
[3]RAMAKRISHNANR,ISLAMR,ISLAMM,etal.Realtimeestimationofparametersforcontrollingandmonitoringpermanentmagnetsynchronousmotors[C]//IEEEInternationalElectricMachinesandDrivesConference.IEEE,2009:1194-1199.
[4] 李紅梅,陳濤,姚宏洋.電動汽車PMSM退磁故障機理、診斷及其發展[J].電工技術學報,2013,28(8):276-284.
[5]ICHIKAWAS,TOMITAM,DOKIS,etal.Sensorlesscontrolofpermanentmagnetsynchronousmotorsusingonlineparameteridentificationbasedonsystemidentificationtheory[J].ElectrialEngineering,2006,53(2):363-372.
[6]KIMSH,CHOICH,SEOKJK.Voltagedisturbancestate-filterdesignforprecisetorque-controlledinteriorpermanentmagnetsynchronousmotors[C]//EnergyConversionCongressandExposition(ECCE).IEEE,2011:2445-2451.
[7] 韓京清.自抗擾控制技術[J].前沿科學,2007(1):24-31.
[8] 韓京清.非線性狀態誤差反饋控制律──NLSEF[J].控制與決策,1995(3):221-225.
[9]HOUZhongsheng,XIONGDan.Theadaptivecontrolsystemdesignwithamodel-freeexternalloopasacompensator[C]//FifthWorldCongressonIntelligentControlandAutomation.IEEE,2004:444-448.
[10]FLIESSM,JOINC.Model-freecontrol[J].InternationalJournalofControl,2013,86(12):2228-2252.
[11] 黃慶,黃守道,匡江傳,等.基于模糊自抗擾的PMSM無速度傳感器控制[J].湖南大學學報(自然科學版),2012,39(7):37-43.
[12] 薛薇,路鴉立.永磁同步電機調速系統的模糊自抗擾控制[J].電機與控制應用,2013,40(8):57-60.
[13]LIUMing,SHAOCheng.Auto-disturbances-rejectioncontrolleranditsparameteradjustingforasynchronousmotor[J].ControlandDecision,2003,18(5):540-544.
[14]SUNLiming,JIANGXuezhi,LIDonghai.TurningofAuto-disturbance-rejectioncontrollerforaclassofnonlinearplant[J].ActaAutomaticaSinca,2004,30(2):251-254.
Model-FreeControlofSMPMSMBasedonExtendedStateObserver
ZHOU Hui, LI Hong-mei
(HefeiUniversityofTechnology,Hefei230009,China)
Thepermanentmagnetsynchronousmotor(PMSM)drivesystemofelectricvehicleoperatesundercomplicatedandchangeableworkingconditions,parametricuncertaintieswillappearandwilldirectlyaffecttheperformanceofPMSMdrivesystembasedonclassicalPIcontrol.Therefore,thedata-drivenmodel-freecontrol(MFC)wasintroduced,theextendedstateobserver(ESO)wasinnovativelycombinedwithMFCtosimplifythecontrollerstructureandimprovecontrolaccuracy.Firstly,theultralocalmodelofsurfacemountedPMSM(SMPMSM)wasbuiltup,thenthed-qaxisMFCcurrentcontrollerofSMPMSMdrivesystemwasdesignedandthemodel-freecontrolledSMPMSMdrivesystemwithESOwereconstructed.Finally,bysystemmodelingandcomparativeresearchwiththeclassicalPIcontrolledSMPMSMdrivesystem,thedynamicandstaticperformanceofproposedSMPMSMdrivesystemanditsrobustnessagainstparametricuncertaintieswasanalyzedandsomevaluableconclusionsareshown.
SMPMSMdrivesystem;parametricuncertainties;extendedstateobserver;ultra-localmodel;model-freecontrol
張萌(1990-), 碩士研究生,研究方向為超聲波電機控制技術。
2015-10-12
國家自然科學基金項目(51377041)
TM341;TM
A
1004-7018(2017)01-0058-04
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19