
救援移動機器人爬梯構型分析*
2021-01-04 09:56:36張洪赫劉玉梅卜春光范曉亮
裝備機械 2020年4期
□ 張洪赫 □ 劉玉梅 □ 卜春光 □ 范曉亮 □ 眭 晉
1.沈陽理工大學 機械工程學院 沈陽 110158 2.中國科學院沈陽自動化研究所 沈陽 110016
1 分析背景
由于城市的獨特環境和一些突發事件的特殊性,導致某些社會救援活動只能由機器人來完成。救援移動機器人具有可移動、自動導航、多傳感器控制、網絡交互、行為控制執行、決策規劃等多種功能,是一個綜合系統[1],如何在樓宇環境中使用救援機器人,成為近年來的研究熱點。樓梯是樓宇環境中最常見的障礙,救援移動機器人在工作中經常需要攀爬樓梯,爬梯成為救援移動機器人適應結構化環境所必備的功能之一[2]。現存相關文獻大部分是關于救援移動機器人爬梯機械結構與爬梯過程穩定性的研究,筆者重點分析前擺腿履帶式救援移動機器人的爬梯機理,以及救援移動機器人在上下樓梯時的步態,并通過試驗驗證分析結果的正確性。
2 救援移動機器人結構
救援移動機器人結構如圖1所示,主要包括車體、機械腰腹,以及位于車身兩側且對稱分布的左右擺腿。采用以上結構由電機驅使左右擺腿運動,改變救援移動機器人的運動姿態,從而使救援移動機器人實現越障運動。機械腰腹位于車體上,可以加載機械手等其它機械結構,使救援移動機器人能夠應用于各種不同環境與場合。通過機械腰腹的前后俯仰,可以改變救援移動機器人的質心位置,履腿復合結構則具有較強的受力能力。總體而言,救援移動機器人結構簡單清晰,易于控制,變形靈活[3]。

圖1 救援移動機器人結構
3 爬梯構型
救援移動機器人在樓宇環境中需要具有一定的越障功能,包括翻越臺階、在樓梯面行走、回歸地面等。為實現以上越障功能,設計了救援移動機器人的特定構型[4-5]。
重點分析翻越臺階。救援移動機器人翻越臺階脫離地面構型如圖2所示,L1為關節擺腿履帶的有效接地長度,H為臺階高度,實現翻越臺階的幾何條件為L1>H。

圖2 救援移動機器人脫離地面構型
幾何條件可以描述為只要關節擺腿履帶的有效接地長度大于臺階高度,就可以有一個合適的角度使關節擺腿搭到臺階面,從而為將救援移動機器人抬離地面做好準備。
救援移動機器人翻越臺階脫離地面力學條件如圖3所示。將機器人的力學模型簡化為三根相鉸接的桿件AB、BC、DE,AB桿件為擺腿,BC桿件為車體,DE桿件為機械腰腹,B、E兩點為轉動關節。筆者對救援移動機器人機械腰腹進行部分簡化,使其與救援移動機器人主體融為一體,即桿件BCD為救援移動機器人主體,通過機械腰腹的前后俯仰,改變桿件的關節轉角,進而改變救援移動機器人的質心位置,更好地進行爬梯[6]。圖3中,機械腰腹質心位置為p3,自重為G3,通過機械腰腹的擺動,改變機器人主體的質心位置p1。

圖3 救援移動機器人脫離地面力學條件
救援移動機器人車體脫離地面的瞬間,可描述為AB桿件繞A點轉動與BC桿件繞動B點轉動相結合的過程。將救援移動機器人整體作為研究對象,N1為地面對救援移動機器人的支撐力,N2為臺階面對關節擺腿的支撐力,G1為車體自重,G2為關節擺腿自重,a1為車體質心加速度,a2為關節擺腿質心加速度,F1與M1分別為車體慣性力向質心簡化后的慣性力主矢和主矩,F2與M2分別為關節擺腿慣性力向轉動中心簡化后的慣性力主矢和主矩,f1與f2為地面對救援移動機器人的摩擦力,根據達朗貝爾原理[7],實現爬梯第一步的力學條件為:
∑Mc(F)=0
N2L3+f2L5+M2-F2L3-G2L2-F1L4
-G1L6-M1=0
由以上分析可以得出,實現救援移動機器人翻越臺階與臺階的高度、關節擺腿的長度和質心位置、車體的長度和質心位置、驅動輪的半徑和質量、關節擺腿的驅動力矩、接觸面的性質有關。關節擺腿的驅動力矩越大,接觸面越粗糙,救援移動機器人就越容易實現爬梯第一步。在救援移動機器人質量不變的條件下,車體加長,整體質心位置向C點靠近,履帶驅動輪半徑增大,都有利于爬梯第一步的實現。其中,救援移動機器人整體質心向C點靠近可以依靠機械腰腹向后擺動實現。當然,關節擺腿的長度變化對翻越臺階的影響最為復雜,在其它因素都不變的情況下,設關節擺腿的驅動力矩為M,則近似有:
(1)
α=arcsin[(H-R)/L1]
(2)
由式(1)、式(2)可知,必然會有一個合適的關節擺腿長度L1,使N2L3最大,進而使救援移動機器人更容易翻越臺階。救援移動機器人翻越臺階脫離地面是成功爬梯的基礎,救援移動機器人翻越臺階的關鍵點為整體質心越過臺階面。救援移動機器人翻越臺階脫離地面過程極限狀態如圖4所示,以車體后輪的軸心O為原點,救援移動機器人質心在笛卡爾坐標系下的坐標為(X0,Y0),后輪半徑為R,救援移動機器人與地面的夾角為θ,則救援移動機器人質心越過臺階面的幾何條件可近似表達為:
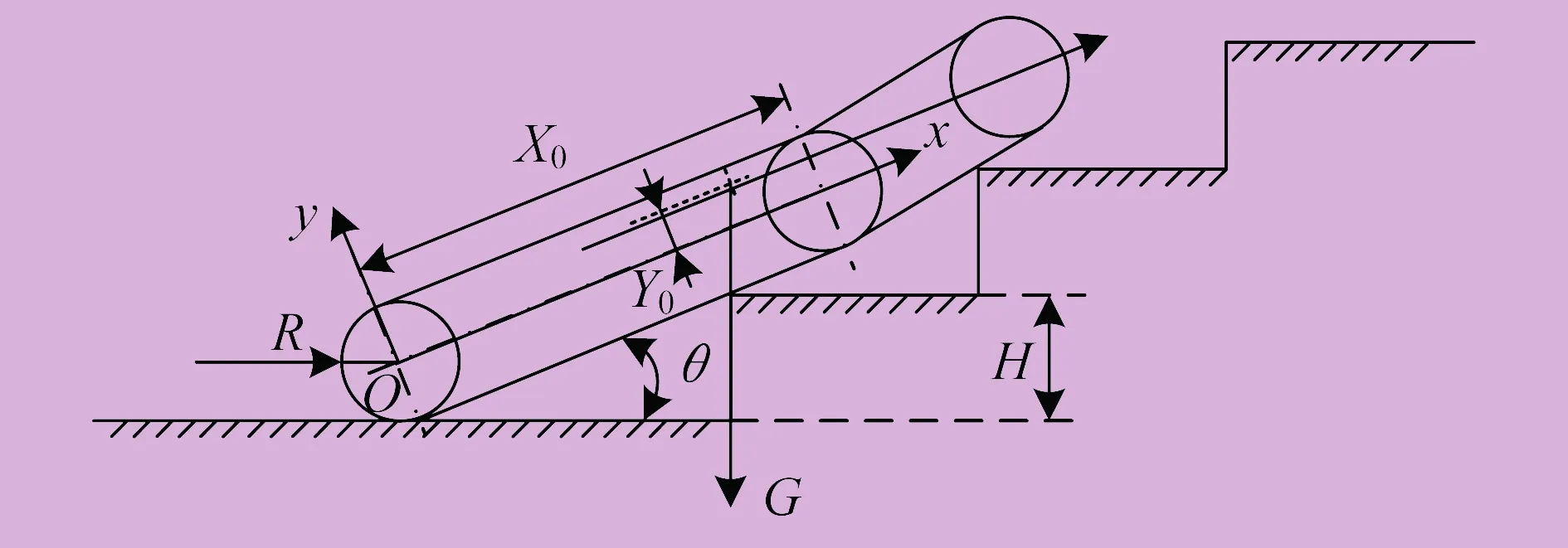
圖4 救援移動機器人脫離地面極限狀態
X0-(R+Y0)tanθ>H/sinθ
(3)
救援移動機器人翻越臺階脫離地面極限狀態力學條件如圖5所示。將救援移動機器人質心越過臺階面的瞬間看作繞Q點的轉動,f3為臺階面對救援移動機器人的牽引力,f4為地面對救援移動機器人的牽引力,J為救援移動機器人繞Q點的轉動慣量,ω為救援移動機器人繞Q點的瞬間轉動角速度,則力學條件可以表達為:
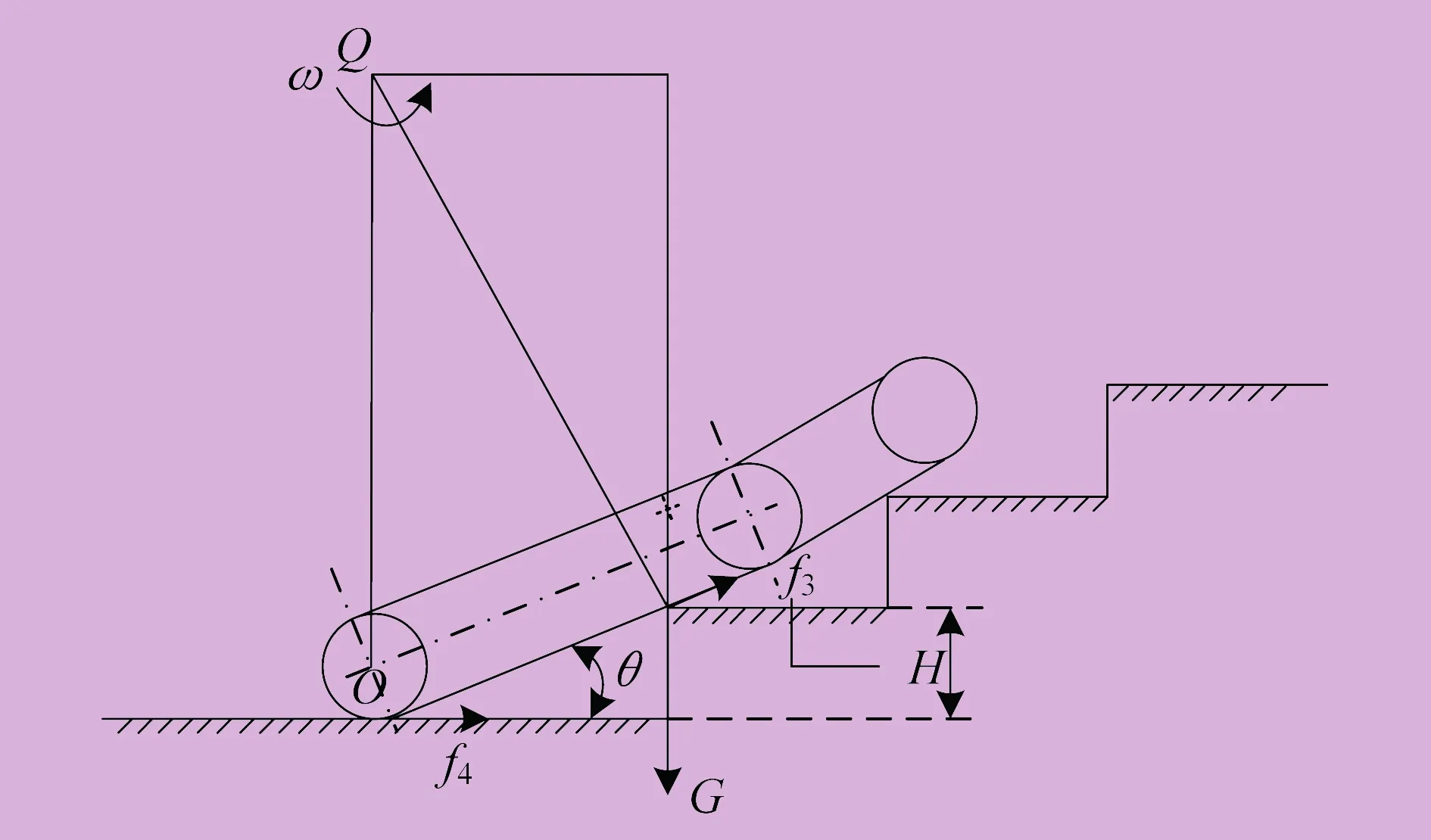
圖5 救援移動機器人脫離地面極限狀態力學條件
[f3H/(sinθtanθ)+f4H/sin2θ
-GH/sinθ]Δt=Jω
(4)
幾何條件給出了救援移動機器人質心越過臺階面所需要的角度θ,力學條件給出了救援移動機器人自身抬高到角度θ所需要的驅動力。由式(3)、式(4)可以得出,救援移動機器人的質心位置與履帶輪的半徑是影響救援移動機器人能否翻越臺階的主要因素,減小履帶輪半徑,降低與前移救援移動機器人質心,都有利于救援移動機器人翻越臺階[8]。其中,救援移動機器人質心位置改變可以通過機械腰腹俯仰運動實現,履帶輪半徑在設計之初就需要考慮。
救援移動機器人長度如圖6所示。救援移動機器人實現在樓梯面上行走,主要與長度有關。

圖6 救援移動機器人長度
L7為車體有效接地長度,T為臺階樓梯寬度,只有滿足式(5),救援移動機器人才可以實現連續爬梯。其中,車體有效接地長度近似等于履帶有效接地長度。
(5)
通過以上分析得到前擺腿履帶式救援移動機器人可連續爬梯的必要條件,救援移動機器人質心位置、履帶輪半徑、擺腿與車體長度都會影響救援移動機器人的爬梯性能。這些影響因素不具有單調性,因此要提高救援移動機器人的爬梯性能,可以在考慮客觀條件的前提下,以上述影響因素為依據,對救援移動機器人的爬梯姿態進行優化。
4 爬梯步驟
對救援移動機器人爬梯姿態進行優化之后,在爬梯過程中,由于重力的作用,會造成救援移動機器人與樓梯臺階面撞擊。這種撞擊產生的振動不僅會造成救援移動機器人損壞,而且會大大降低救援移動機器人在爬梯時的穩定性。為了盡量減小撞擊產生的振動,規劃了如圖7所示救援移動機器人爬梯步驟[9]。

圖7 救援移動機器人爬梯步驟
救援移動機器人爬梯步驟共有八步。從救援移動機器人接觸臺階開始,第一步,將擺腿向上抬起,選擇一個適合的角度將擺腿搭在臺階面上。第二步,擺腿向下運動,直至擺腿下的履帶與主體下的履帶平行,機械腰腹向前擺動,控制救援移動機器人質心位置向前。第三步,機械腰腹擺動,保證救援移動機器人質心穩定,救援移動機器人開始爬梯,在臺階面上行走。第四步,救援移動機器人擺腿到最后一階臺階。第五步,救援移動機器人繼續行走,履帶輪到達最后一階臺階。第六步,擺腿向下運動,直至擺腿接觸地面。第七步,救援移動機器人繼續行走,主體后履帶到達最后一階臺階回歸地面,機械腰腹向后擺動,保證救援移動機器人質心位置向后偏移,方便救援移動機器人回歸水平行走姿態。第八步,擺腿向上運動,機械腰腹向后擺動,救援移動機器人姿態恢復為水平地面行走[10]。
5 仿真驗證
為驗證上述分析的正確性,進行了救援移動機器人的仿真驗證。
仿真試驗使用虛擬樣機分析軟件RecurDyn對救援移動機器人進行建模,并通過搭建仿真樓梯進行試驗。
RecurDyn軟件搭載了許多使用模組,使用系統工具包Track建立救援移動機器人虛擬樣機,使用Ground模組搭建樓梯地形。
救援移動機器人爬梯仿真的過程和試驗結果如圖8所示。
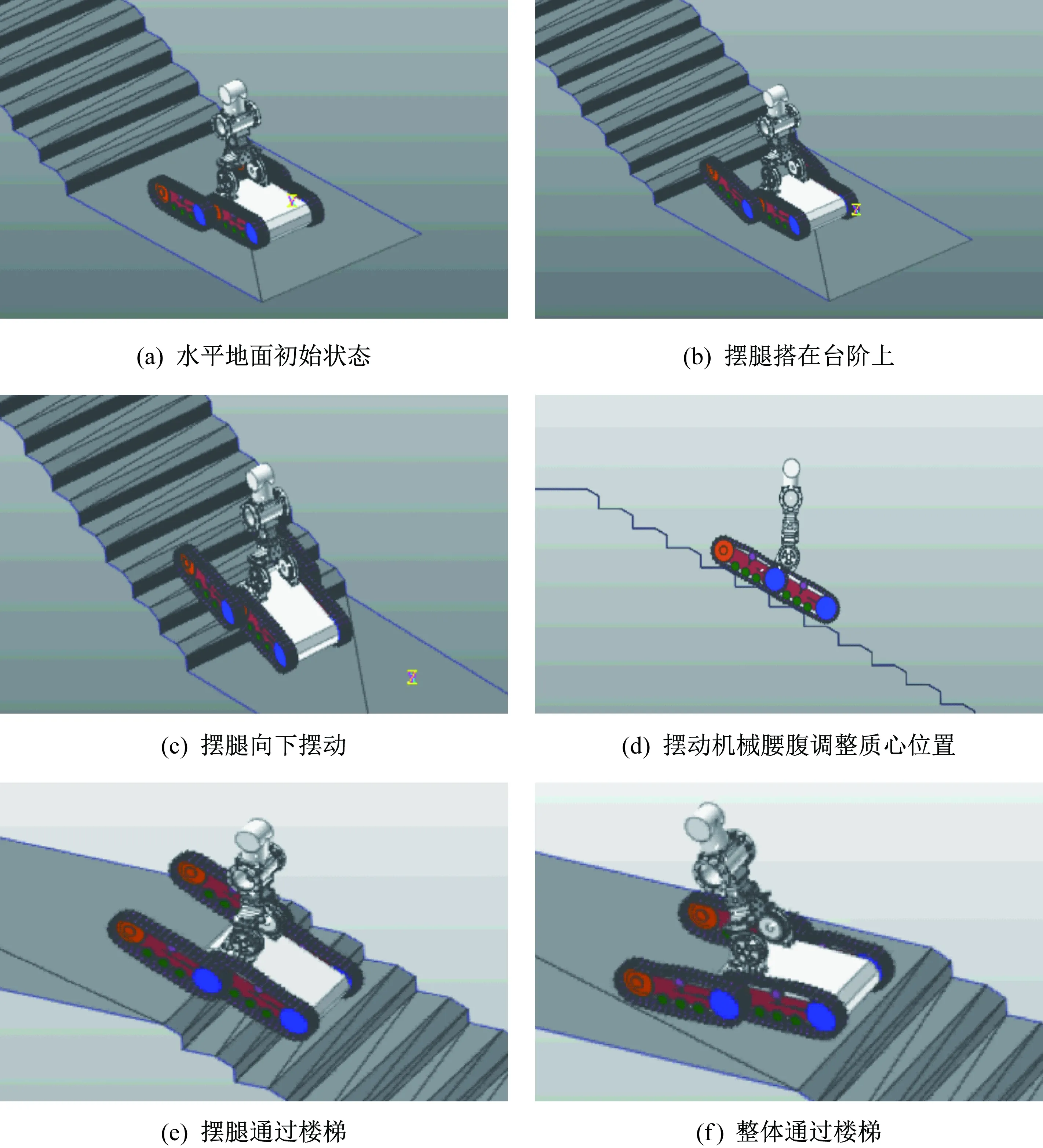
圖8 救援移動機器人爬梯仿真試驗
所采用的爬梯步驟有效減小了撞擊產生的振動,提高了救援移動機器人爬梯的穩定性,同時也驗證了所分析的爬梯條件的正確性。
6 結束語
筆者對前擺腿履帶式救援移動機器人進行了爬梯構型分析,提出了連續爬梯的必要條件,并通過仿真試驗進行了驗證。所做分析為在救援移動機器人設計初始階段如何確定關鍵尺寸、計算所需驅動力、進行爬梯姿態調整提供了借鑒。通過機械腰腹與擺腿的運動,改變救援移動機器人的姿態,實現了攀爬樓梯。
當然,要使救援移動機器人真正滿足使用要求,還需要對其步態和能耗進行優化,使其性能真正達到最優。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
制造技術與機床(2017年3期)2017-06-23 08:11:21
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
智能系統學報(2015年4期)2015-12-27 09:38:35
