拖曳式浮標海面尾跡圖像仿真研究
2017-03-03 01:09:15王永生劉翠海孫華慶郝曉虎
艦船電子工程 2017年2期
關鍵詞:深度
劉 巖 王永生 劉翠海 孫華慶 郝曉虎
(1.海軍潛艇學院 青島 266000)(2.91033部隊 青島 266000)
拖曳式浮標海面尾跡圖像仿真研究
劉 巖1王永生1劉翠海1孫華慶1郝曉虎2
(1.海軍潛艇學院 青島 266000)(2.91033部隊 青島 266000)
利用開爾文尾跡理論,構建拖曳式浮標海面尾跡仿真模型,并對拖曳浮標在海洋背景場條件下不同航速、不同吃水航深、不同粘滯系數的尾跡進行仿真對比,分析尾跡波的變化。結果表明,當僅考慮尾跡水動力模型時,浮標吃水深度一定,在一定航速范圍內,航速越大,尾跡越清晰;當航速一定,浮標吃水深度不同時,尾跡圖像明顯不同。
拖曳式浮標; 尾跡模型; 仿真分析
Class Number TN92
1 引言
為實現水下隱蔽通信問題,各國海軍一直在尋求更為有效的通信手段。其中,通信浮標技術代表著一種重要的發展方向。以美國為代表的西方軍事發達國家把通信浮標作為解決潛艇水下隱蔽通信的重要手段,先后研發和成功研制多種類型的通信浮標。拖曳式浮標是其中應用較為廣泛的通信浮標之一,其由一根較長的電纜與艇體相連,浮標體自身重量較大,為確保其通信可靠性,浮標只能在一定的航行深度和航速,工作海況不得大于5級。盡管拖曳式浮標體積相對較小,但也足以在水面產生明顯尾跡特征,仍存在被合成孔徑雷達等偵測設備捕捉的可能性。因此,對拖曳式通信浮標的尾跡研究具有實際意義。
本文對拖曳式浮標在水面狀態航行時產生的尾跡進行建模仿真,并將尾跡波與海洋表面波浪背景場相疊加,分析不同條件下的尾跡特征。
2 拖曳式浮標尾跡模型
開爾文尾跡是船體對水面的擾動而產生的尾跡,開爾文尾跡模型也適用于拖曳式通信浮標的尾跡仿真。該模型運用格林函數來描述流體點源的運動,在一定的邊界條件下,可以得到近表面的速度,從而得到波高。
如果只考慮尾跡的表面重力波,忽略湍流尾跡,假設拖曳式通信浮標在工作狀態時的航速為V,航向為x,其運動過程中產生的自由表面波高可以用以下函數表示:
(1)
其中k0=g/V2,g為重力,θ是基于航向的波浪傳播方向,Re是實部,A(θ)是和特性有關的函數。在一定的近似條件下,將基于縱向中心面的浮標的場源分布來代表浮標表殼。根據這個理論,場源強度可以表示為
(2)
F是浮標表殼函數;在遠場波浪的條件下,A(θ)表示為
(3)
其中H(k,θ)是科欽函數(SH是浮標表殼):
(4)
簡化形狀為:浮標體水線是拋物線,浮標兩側是垂直的,f表示為
(5)
b是浮標寬度,l是浮標長度;考慮粘滯拖曳作用對側波的影響,波高表達式為
ζ(x,y)=ζ0(x+l,y)+Cζ0(x-l,y)
+ζ1(x+l,y)+Cζ1(x-l,y)
(6)
C是粘滯系數,函數ζ0(x,y)、ζ1(x,y)的表達式分別為
·sin(h(x,y))dθ
(7)
·cos(h(x,y))dθ
(8)
h(x,y)=k0(secθ)2(xcosθ+ysinθ)
(9)
3 仿真結果及分析
3.1 仿真步驟
基于上述模型,仿真步驟如下:
1) 輸入浮標尺寸、吃水深度、航速等參數,模擬出浮標尾跡波形;
2) 運用隨機產生的噪聲,模擬海背景場;
3) 將尾跡與背景場疊加,模擬波高。
3.2 仿真結果分析
假定浮標體積參數為1900mm×1100mm×1000mm,浮標體在5級海況下能夠正常工作。仿真時,圖像分辨率設置為512×512,精度為0.2m。
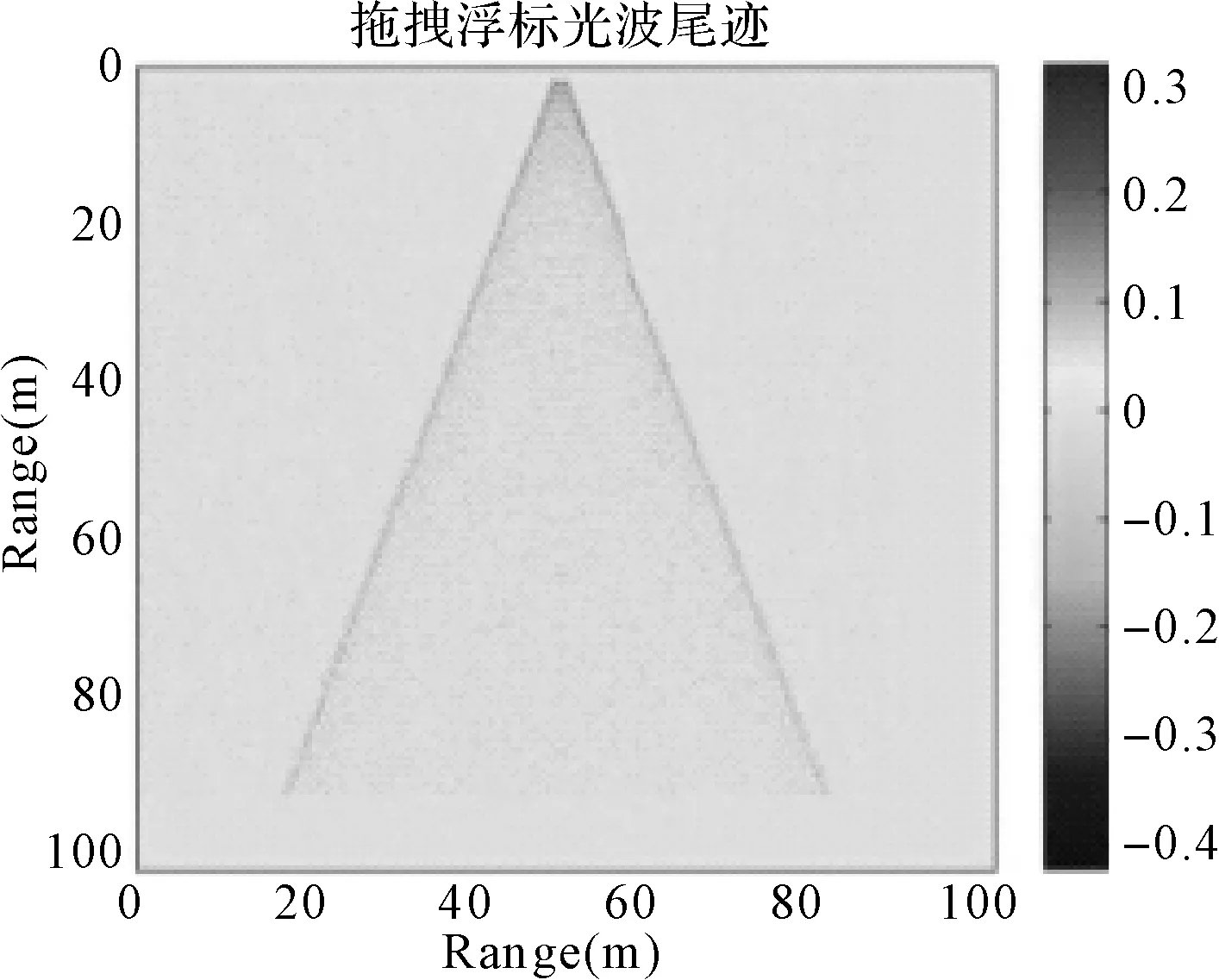
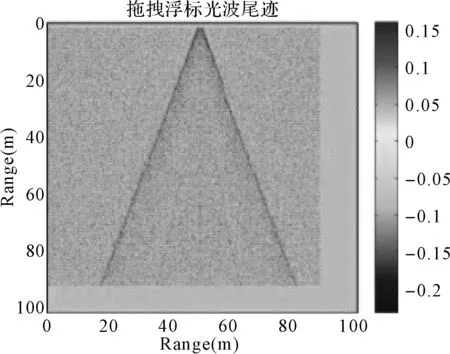
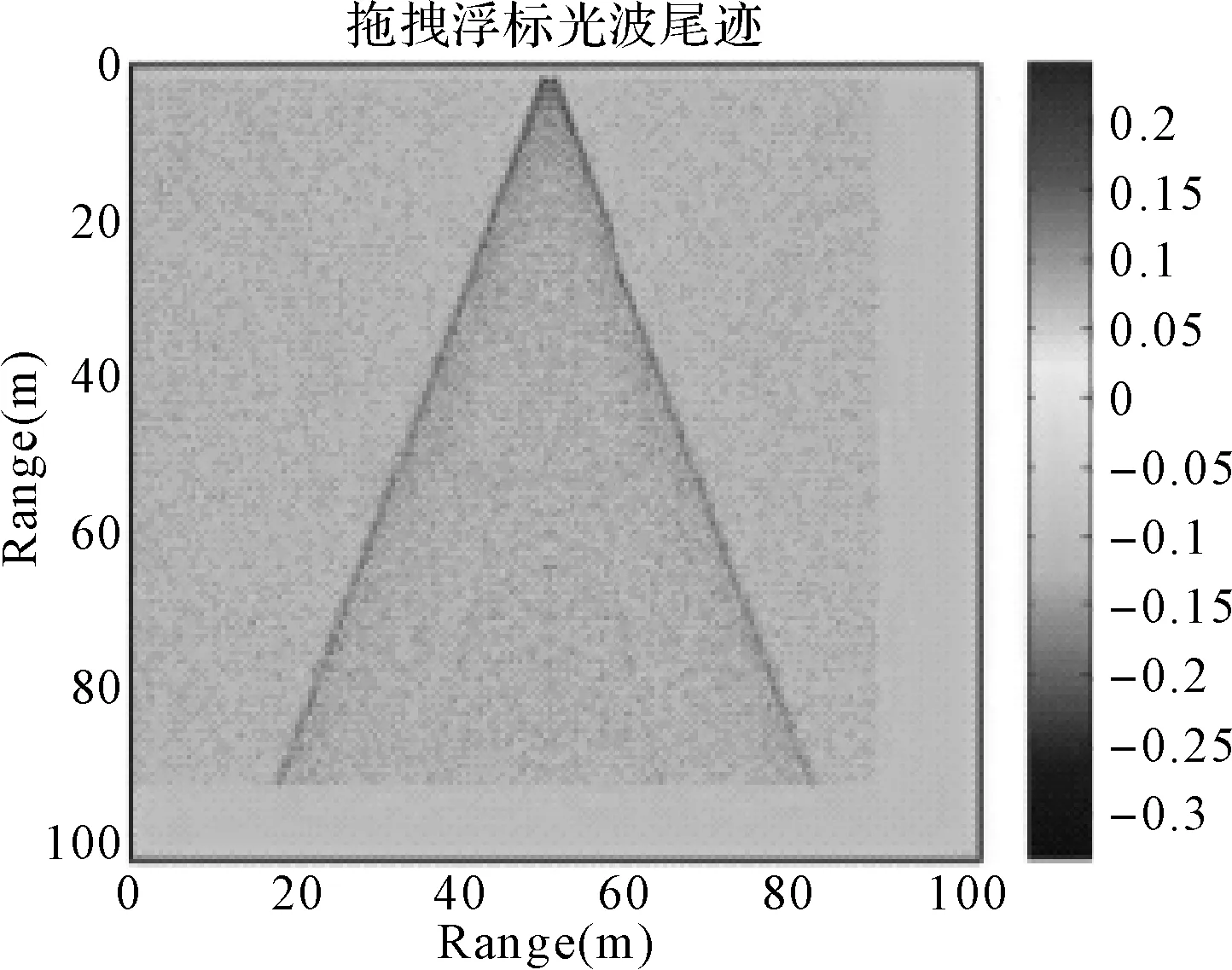
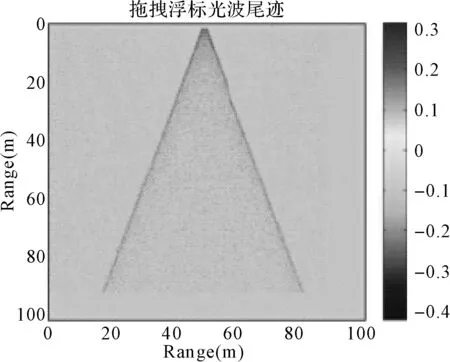
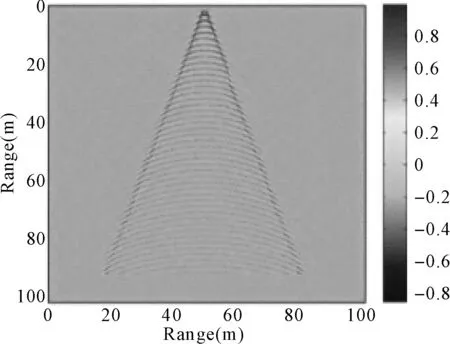
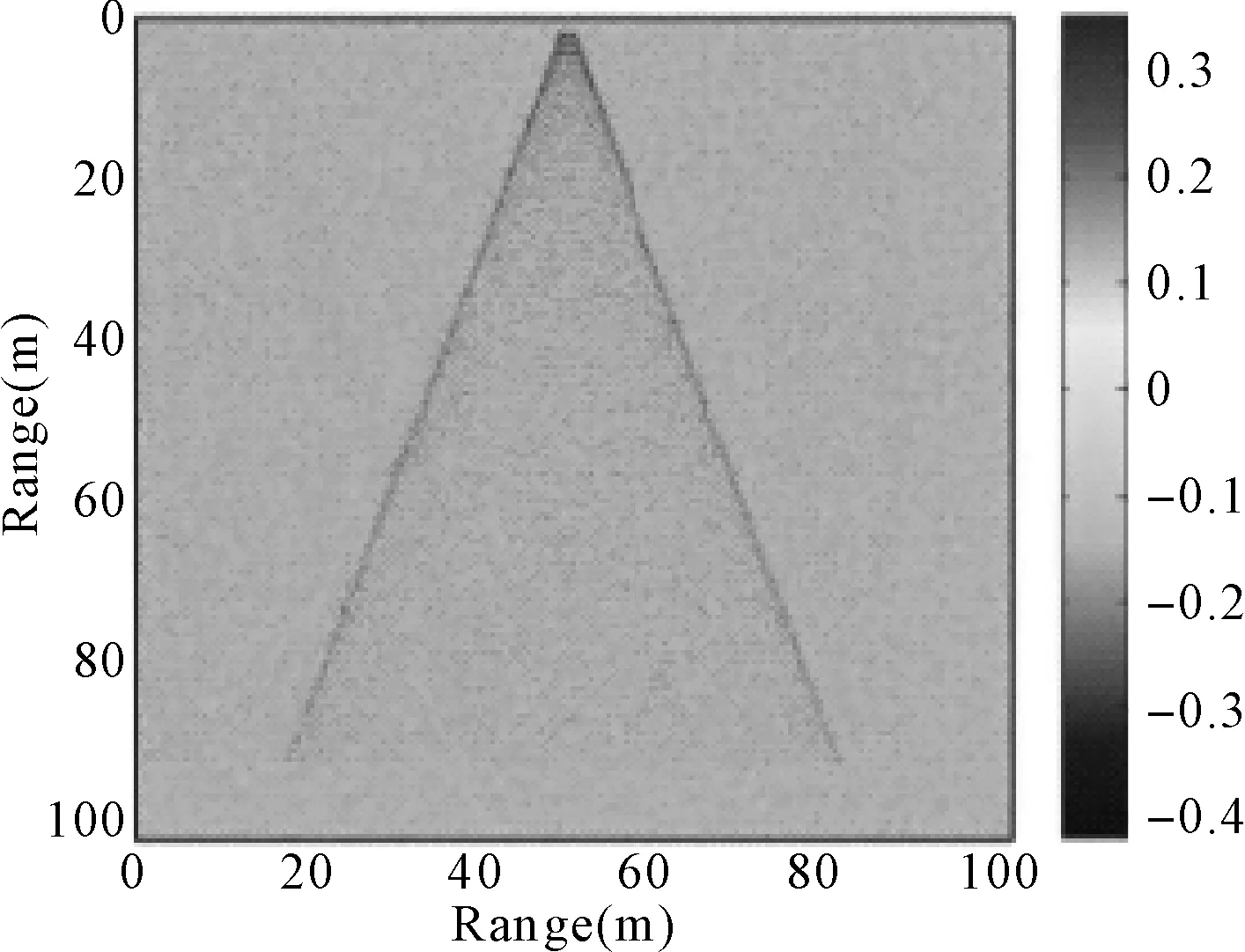
3.2.1 浮標吃水深度一定,不同航速條件下的尾跡波仿真結果
浮標工作時,對航速有一定要求,以確保通信的可靠性和隱蔽性。仿真過程中,取8kn、5kn,2kn三個航速進行運算和對比分析,更全面地對不同航速條件下的尾跡波進行研究。
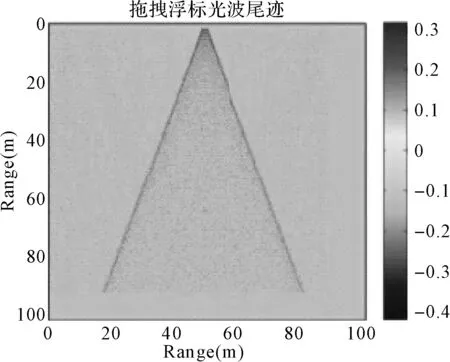
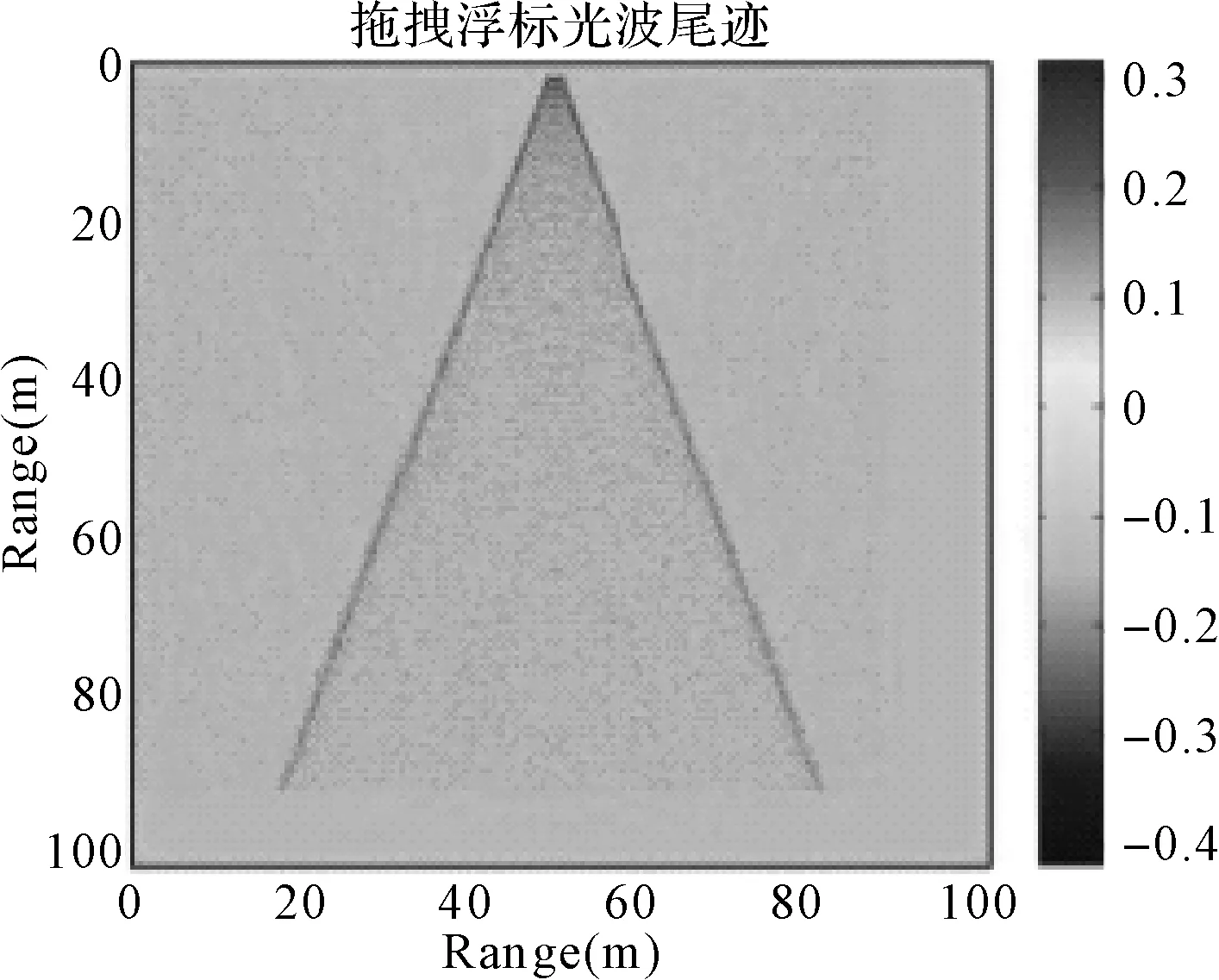
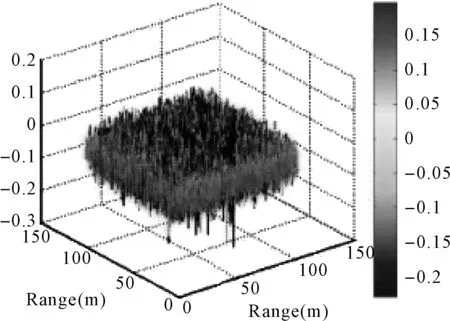
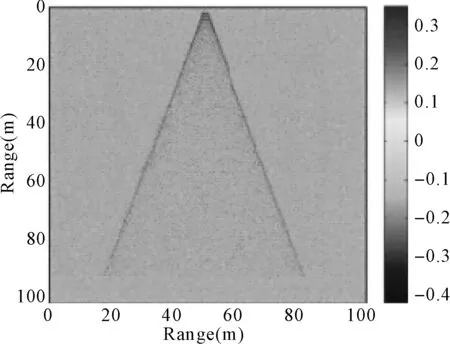
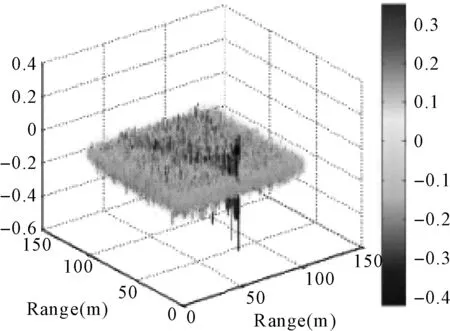
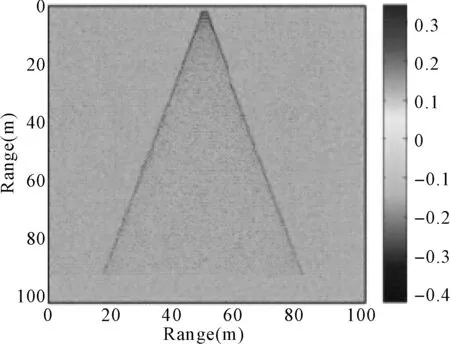
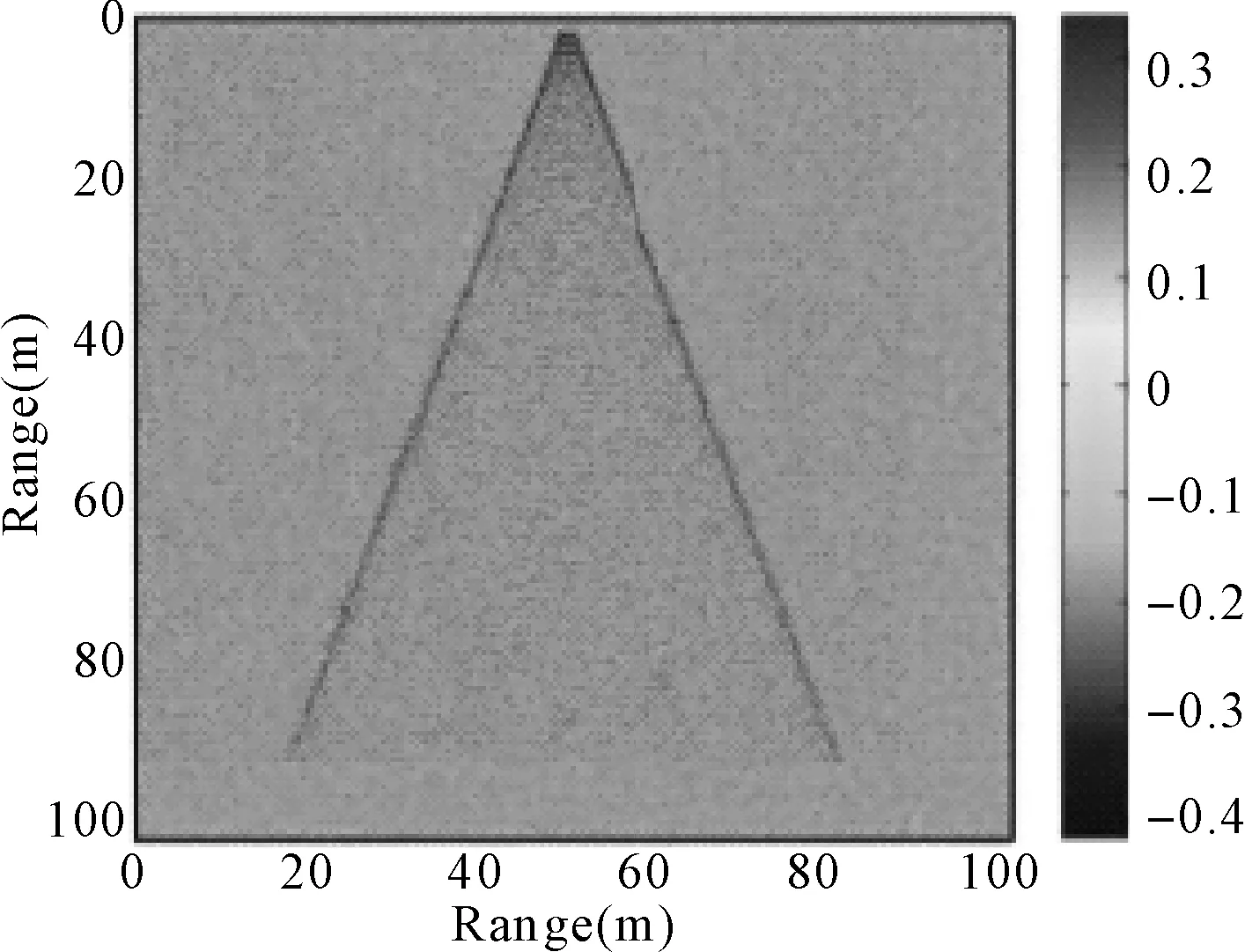
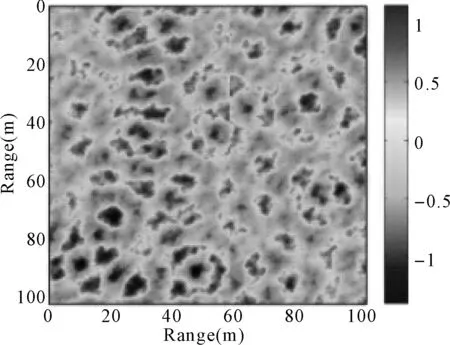
圖1反映的是浮標吃水深度為1m,海水粘滯系數為0.1,分別在三個航速下的仿真結果圖。

(a)V=8kn
(b)V=5kn
(c)V=2kn
通過比對分析,從圖中可以看出,當航速在2kn時,圖像模糊,基本無尾跡特征;當航速為5kn時,出現明顯尾跡波;當航速達到8kn時,尾跡波很明顯,橫波清晰可見。可以得出,當浮標吃水深度不變時,艇速在2kn~8kn的范圍,速度越大,浮標運動過程中產生的尾跡波越明顯,反之,航速越小,尾跡特征越不明顯。
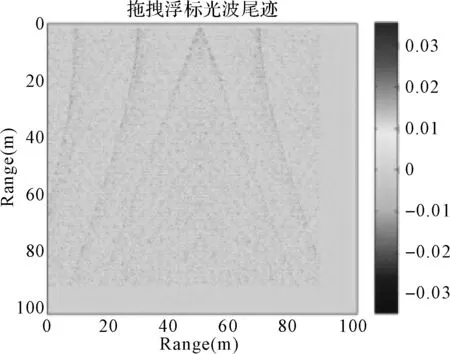
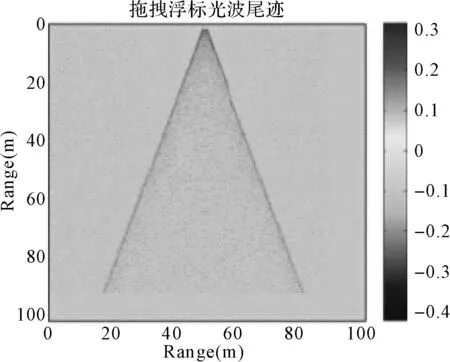
3.2.2 航速一定,浮標不同吃水深度條件下的尾跡波仿真結果
拖曳式通信浮標在工作狀態時,受潛艇航行深度、線纜拖曳長度、浮標體重量等影響,是處于不同的吃水深度的。由于浮標上安裝的天線體必須露出水面,所以,其吃水深度有限。考慮到浮標高度,取吃水深度0.25m、0.5m和1m深度進行仿真對比。
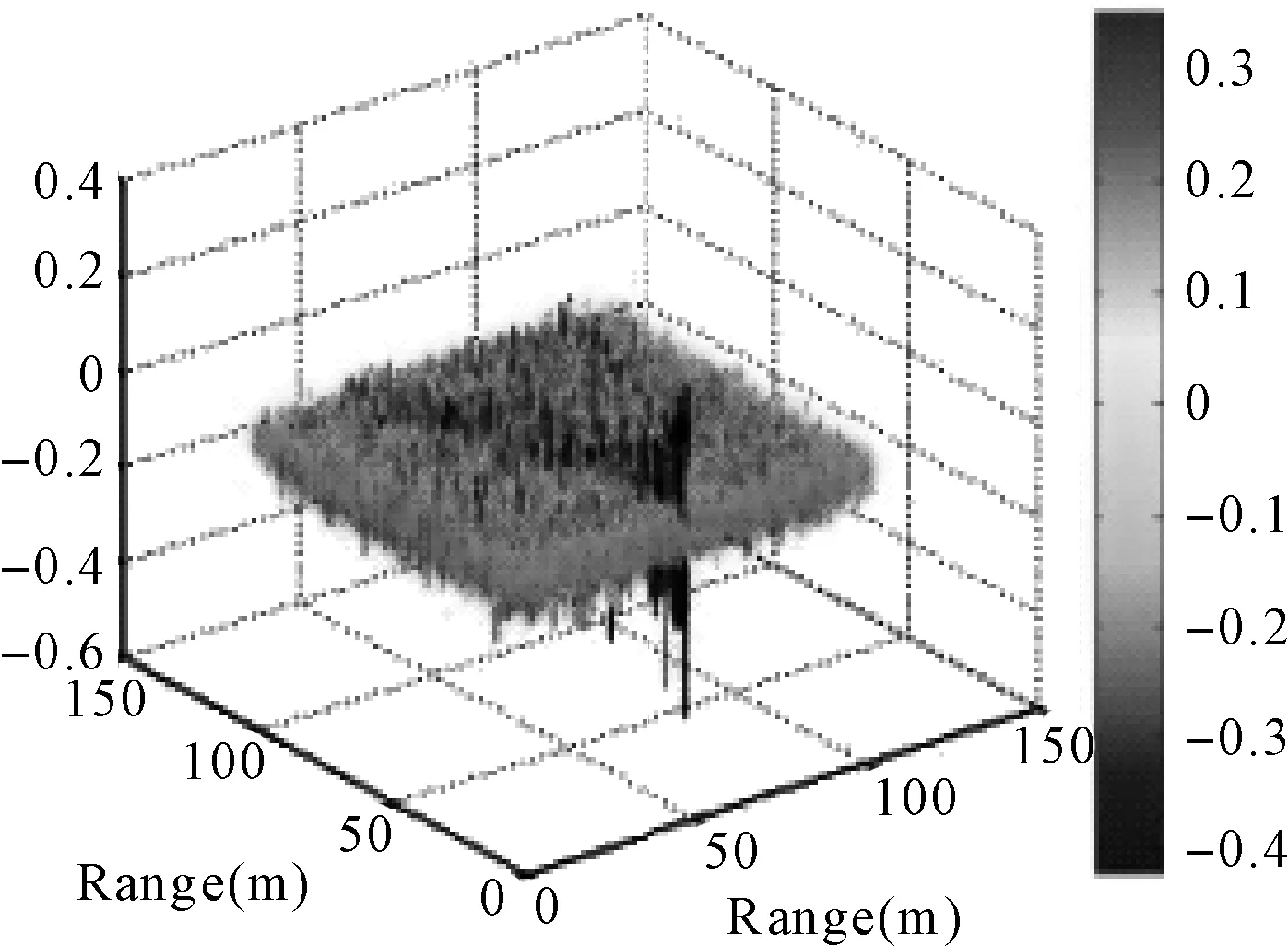
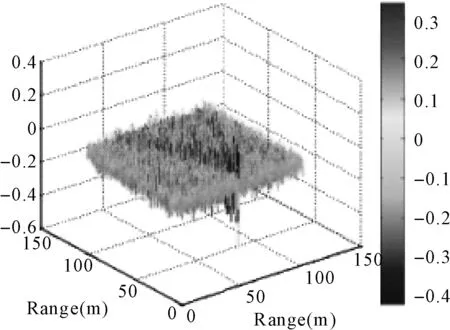
圖2反映的是航速在5kn,粘滯系數0.1時,三種吃水深度下的仿真結果。
(a)d=0.25m
(b)d=0.5m

(c)d=1m
從仿真結果圖中可以看出,當吃水深度在0.25m時,無明顯尾跡波,當深度達0.5m時,海面有較清晰尾跡波,當深度達到1m時,尾跡波非常明顯。可見,當航速一定時,浮標的吃水越大,尾跡波越明顯,當吃水深度達到1m時,尾跡波最明顯。
3.2.3 浮標吃水深度一定、航速一定,不同粘滯系數的仿真結果
在不同海區,海水的粘滯系數是不同的,也會造成浮標尾跡的變化,波形不一致。取航速在5節,浮標體吃水深度為1m,對粘滯系數分別為0.1、0.2、0.3進行仿真。
(a)C=0.1

(b)C=0.2
(c)C=0.3
通過比對分析,從圖3中可以看出,粘滯系數影響尾跡波形的大小,粘滯系數越大,尾跡越大。但波形無明顯改變,可以看出,粘滯系數對波形的影響較小。
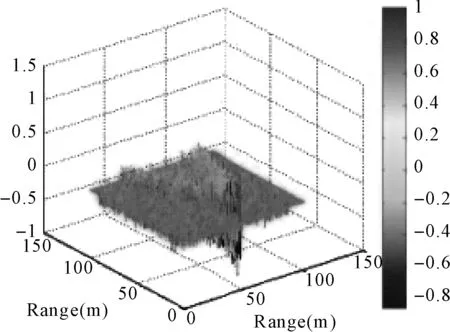
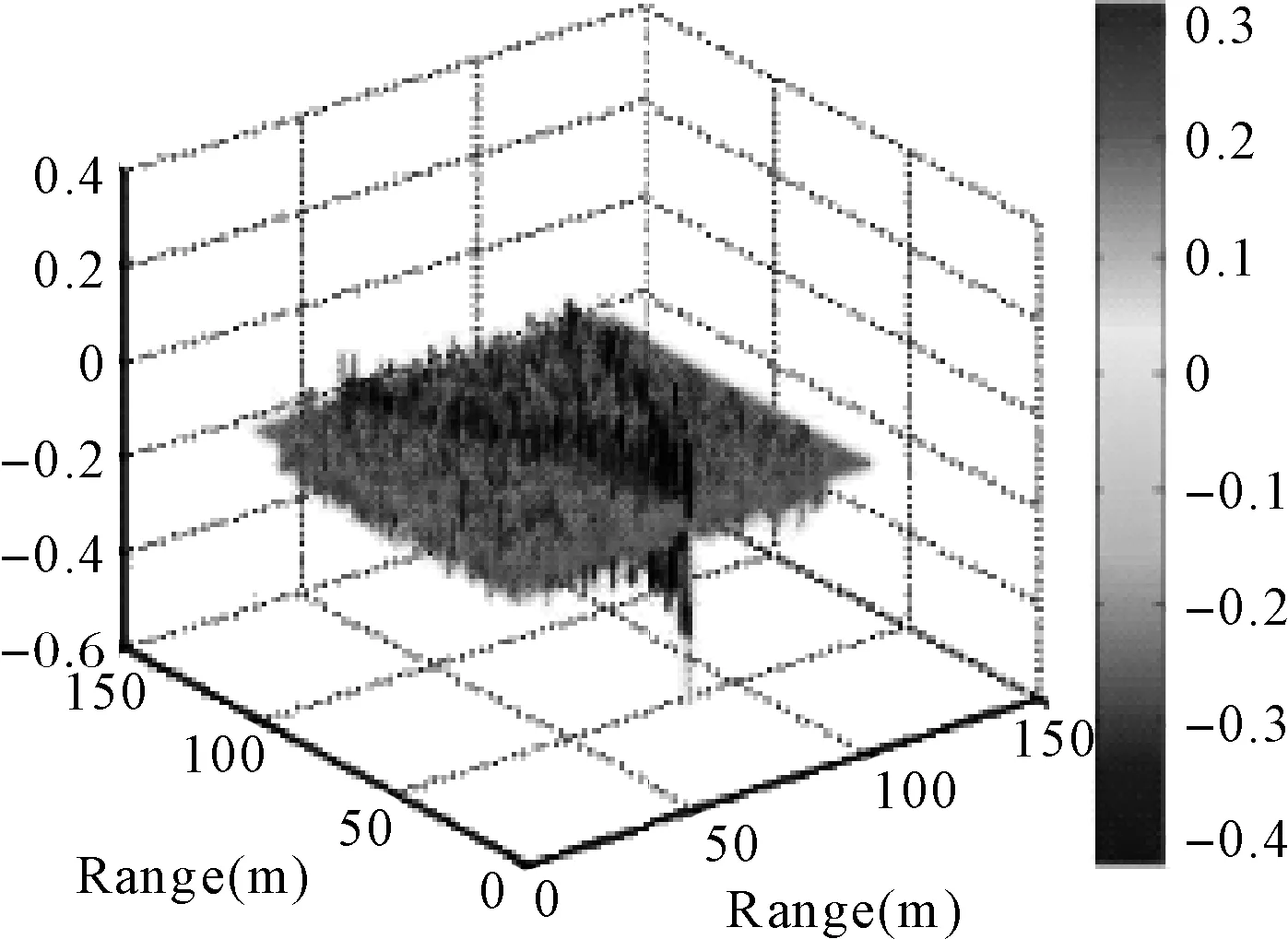
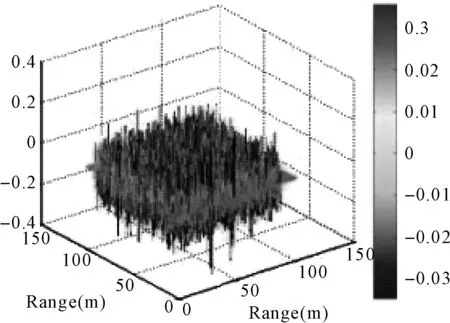
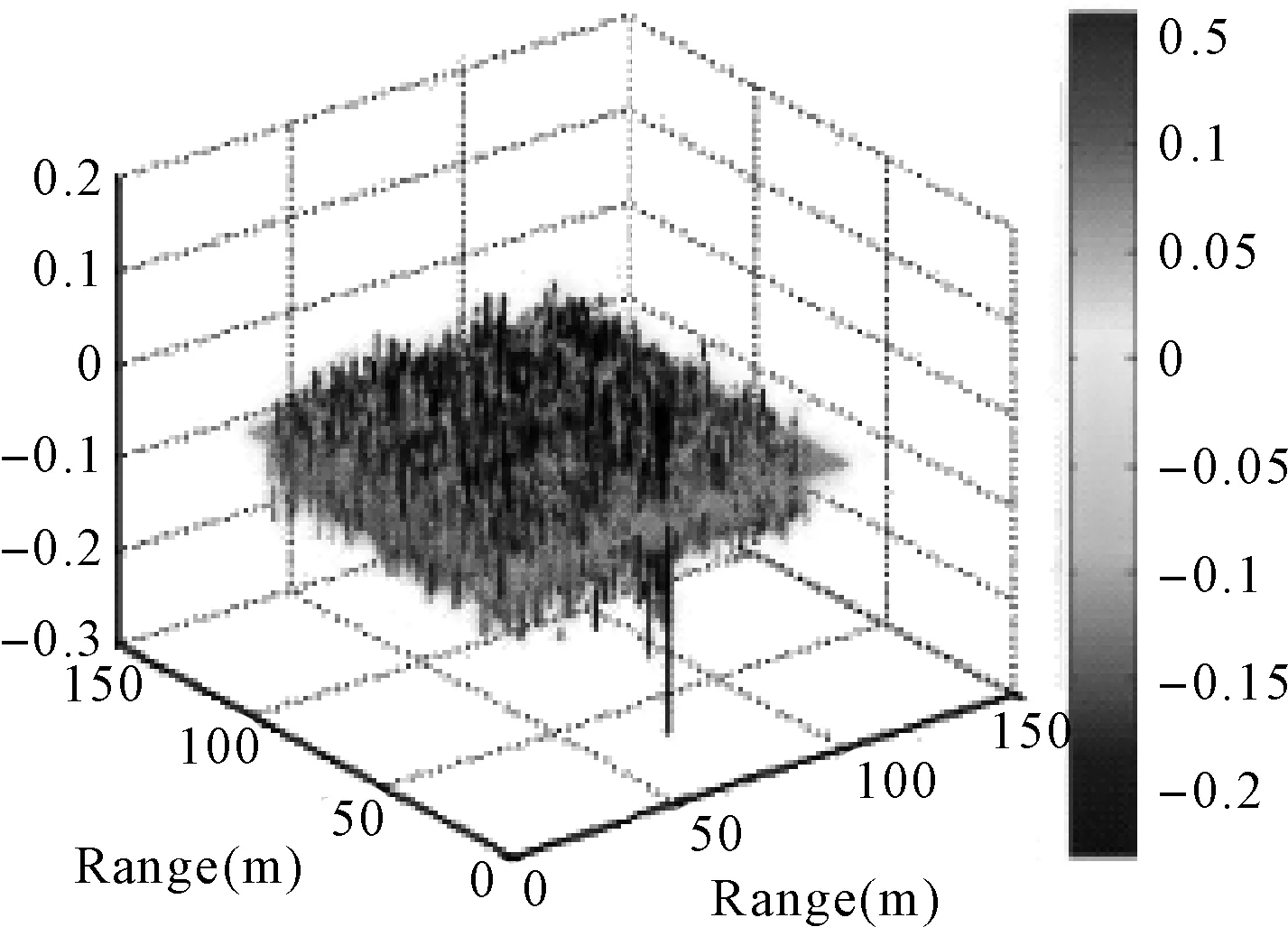
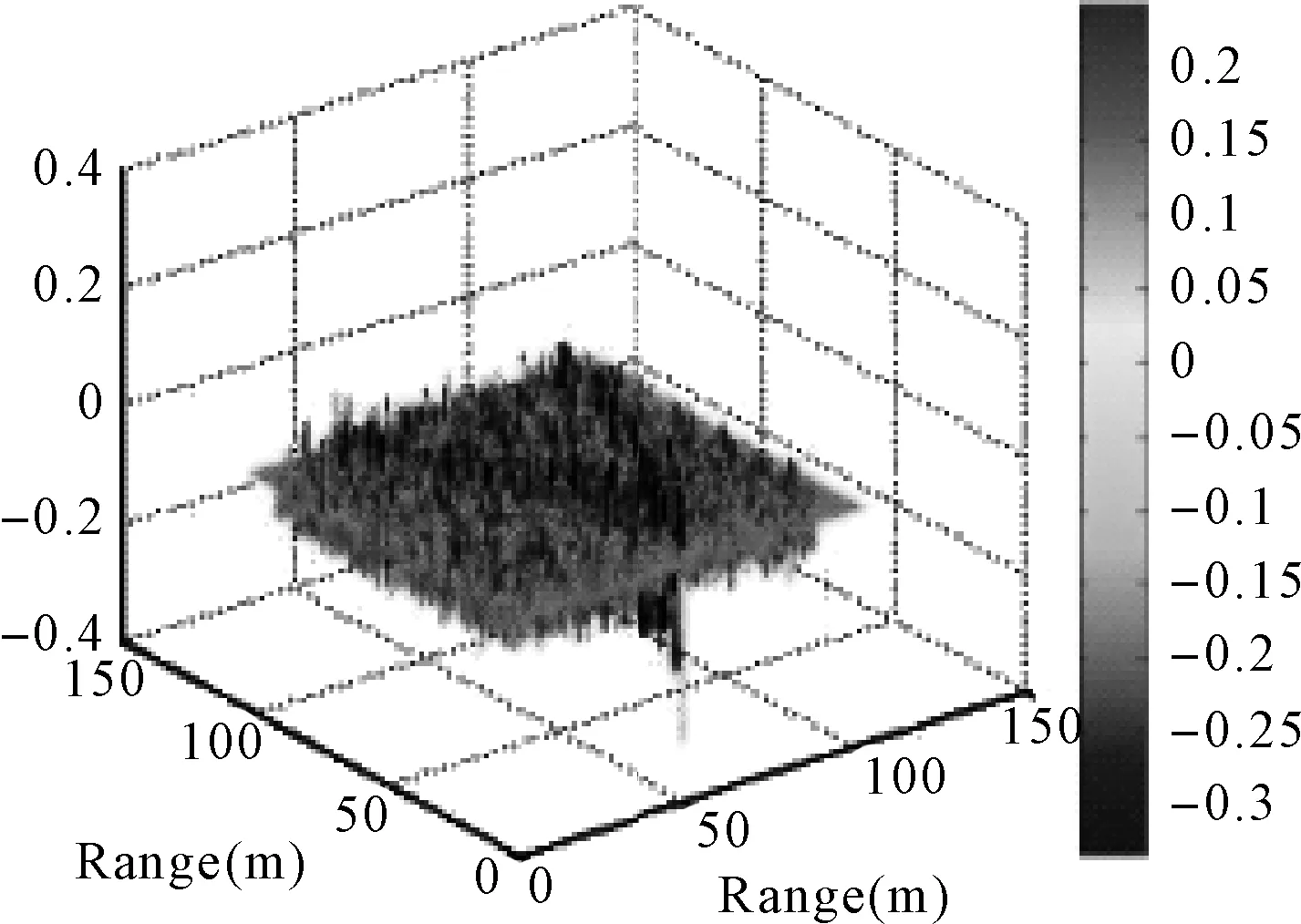
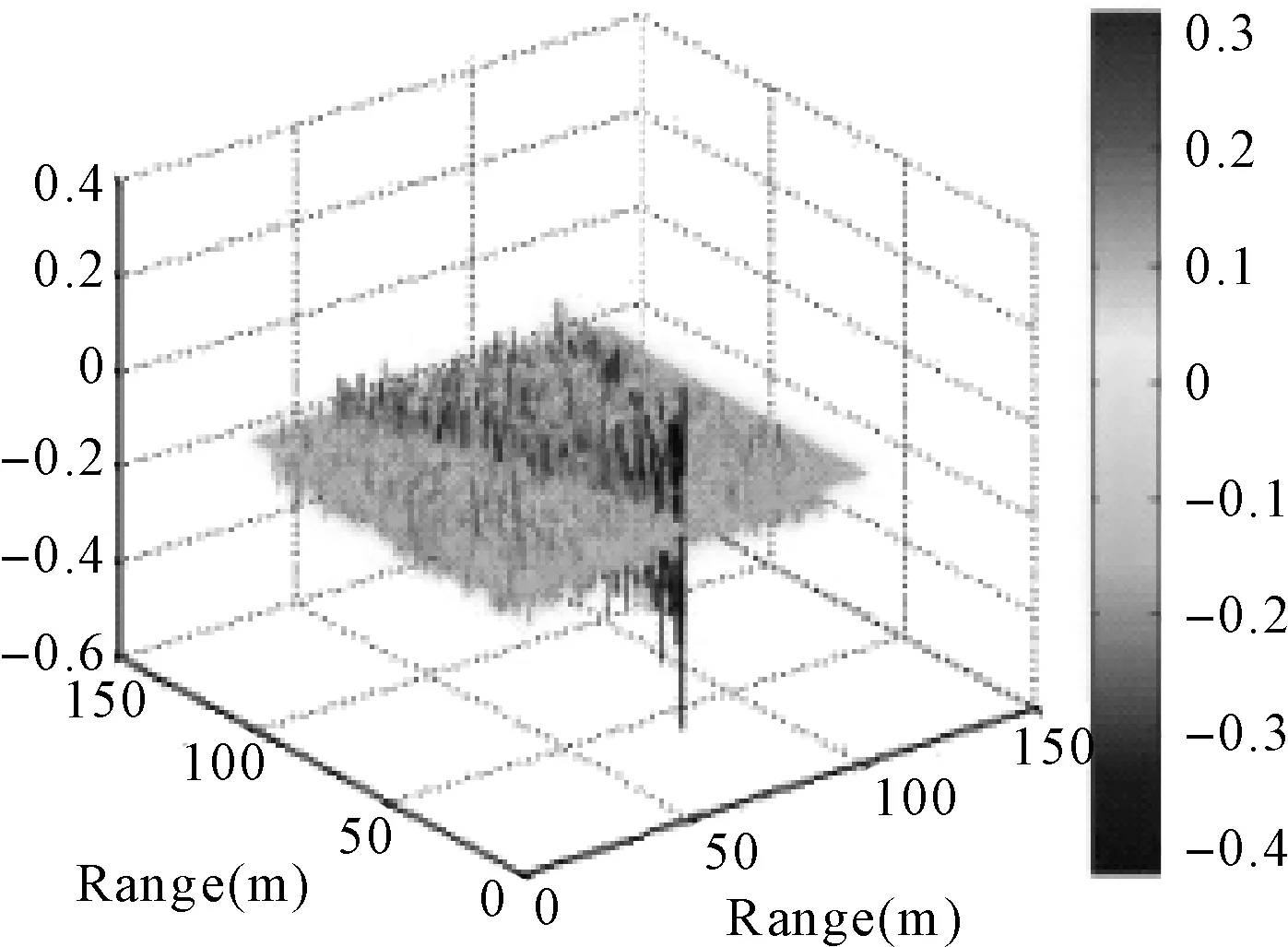
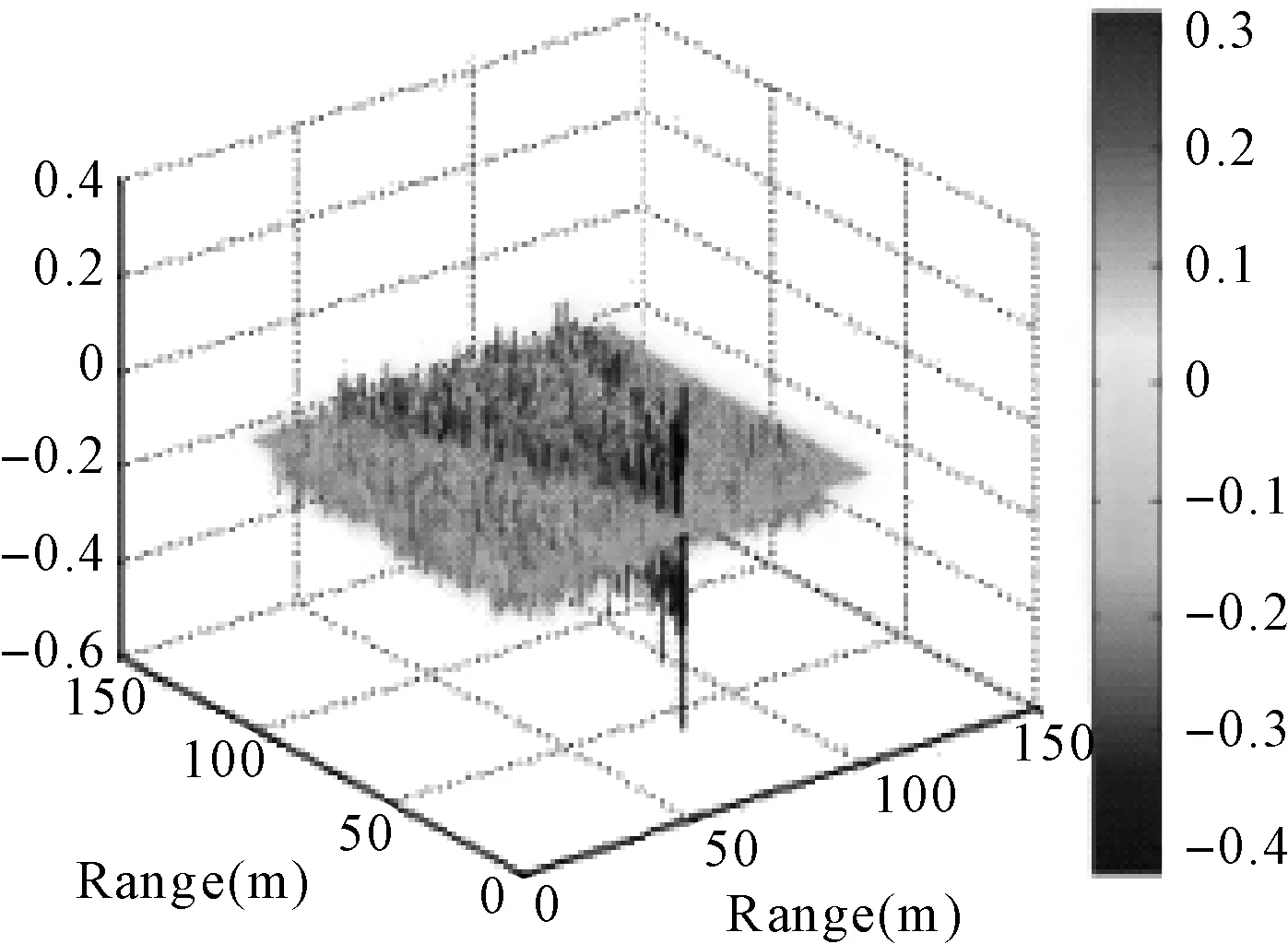
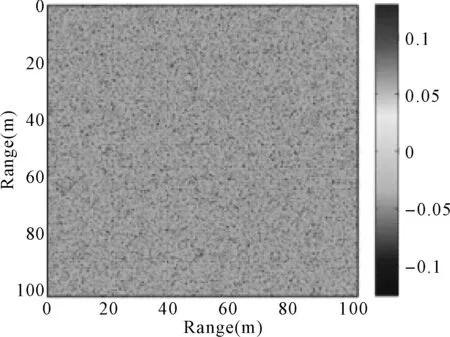
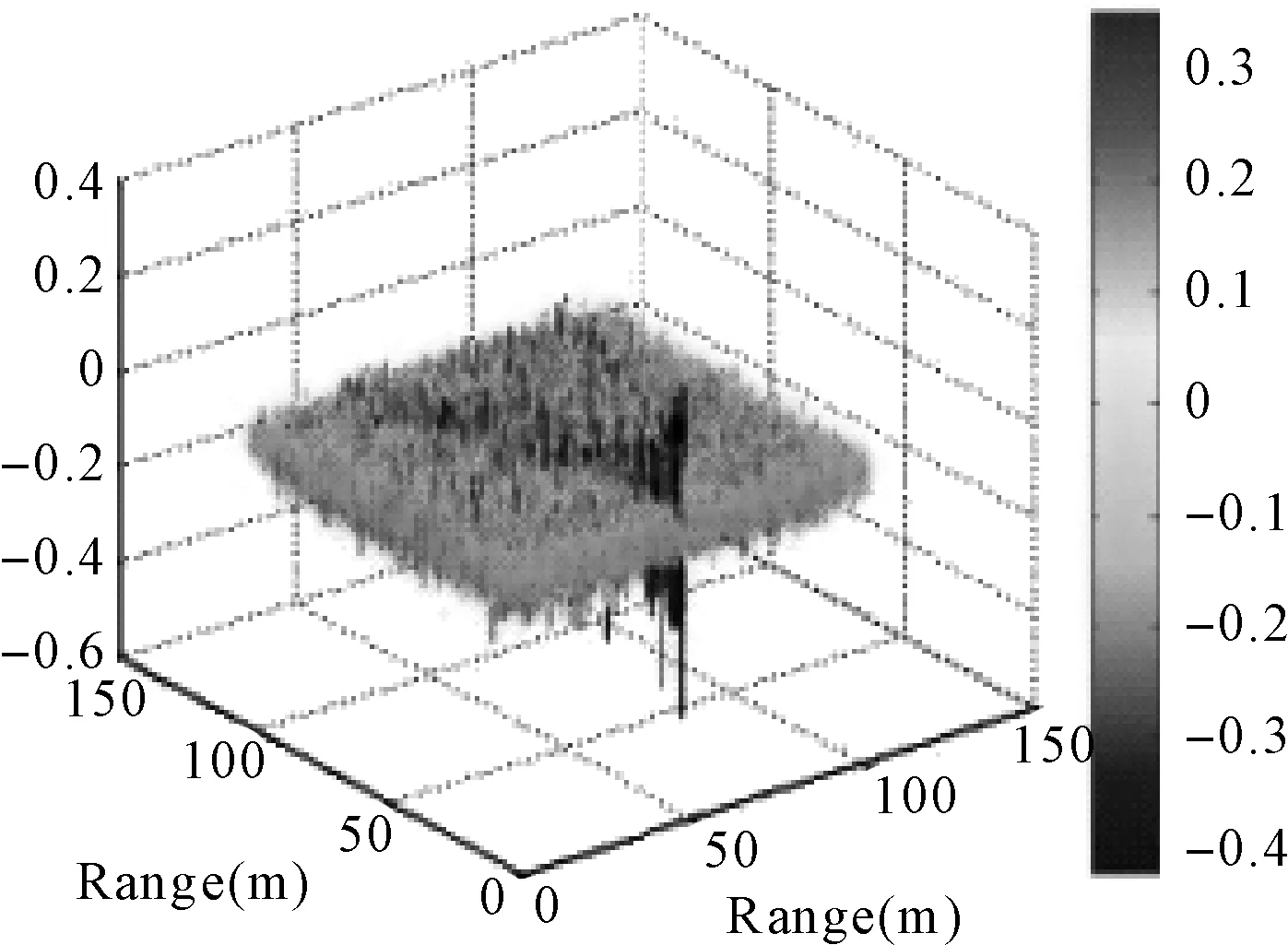
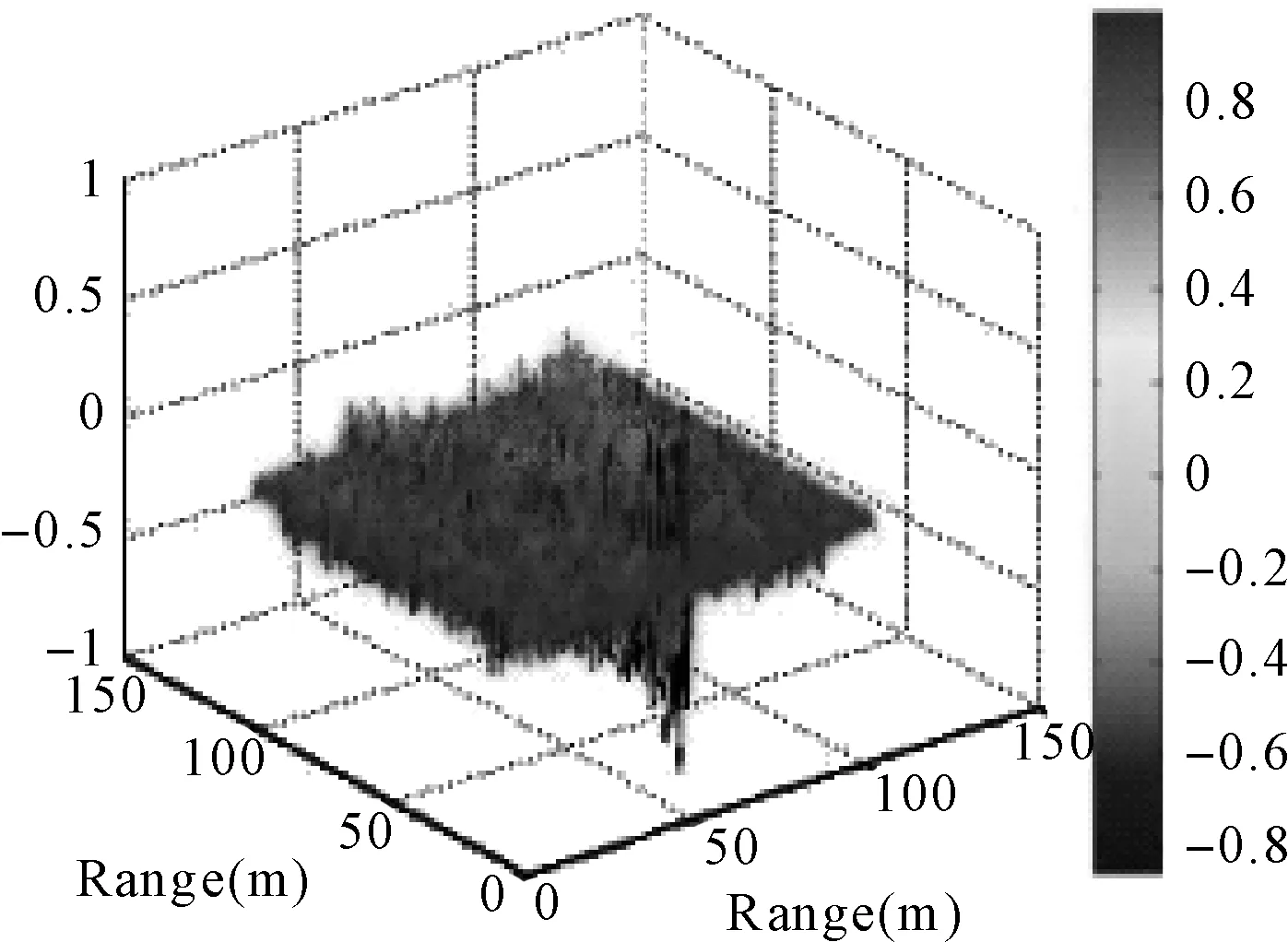
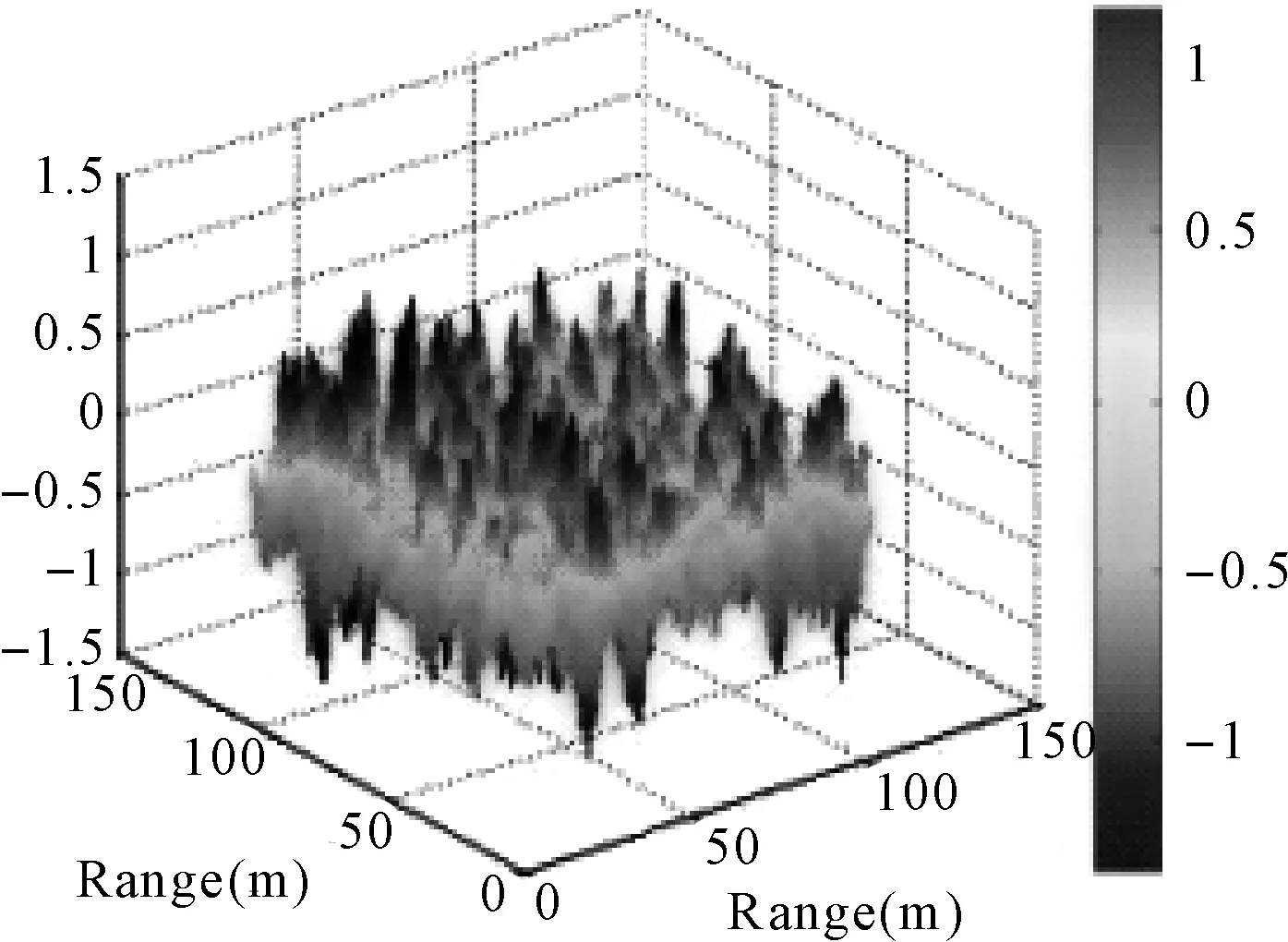
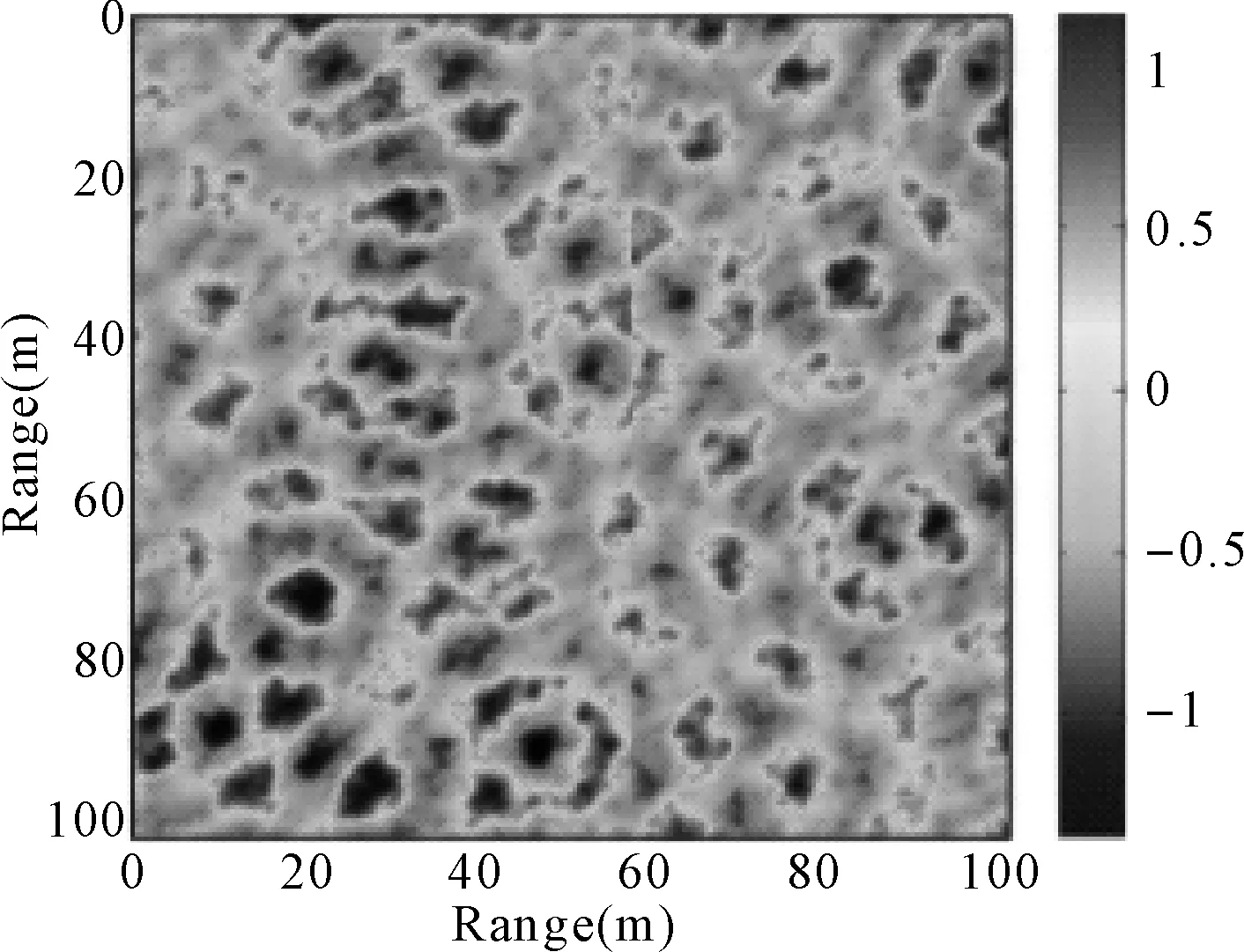
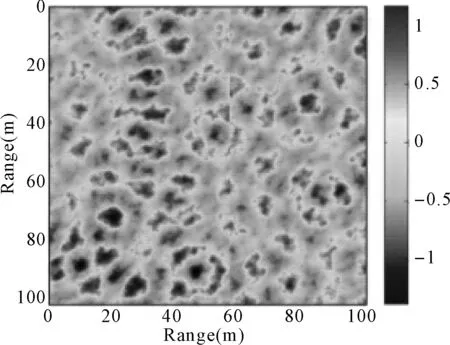
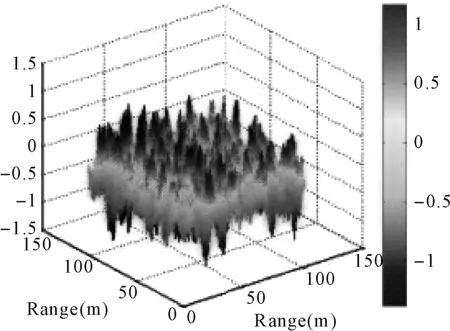
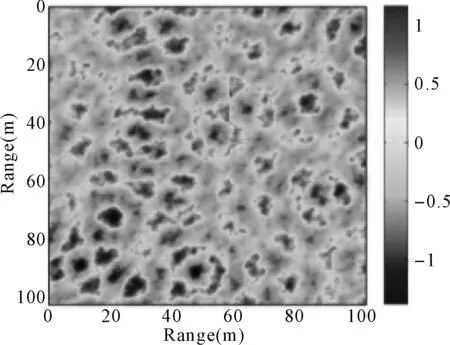
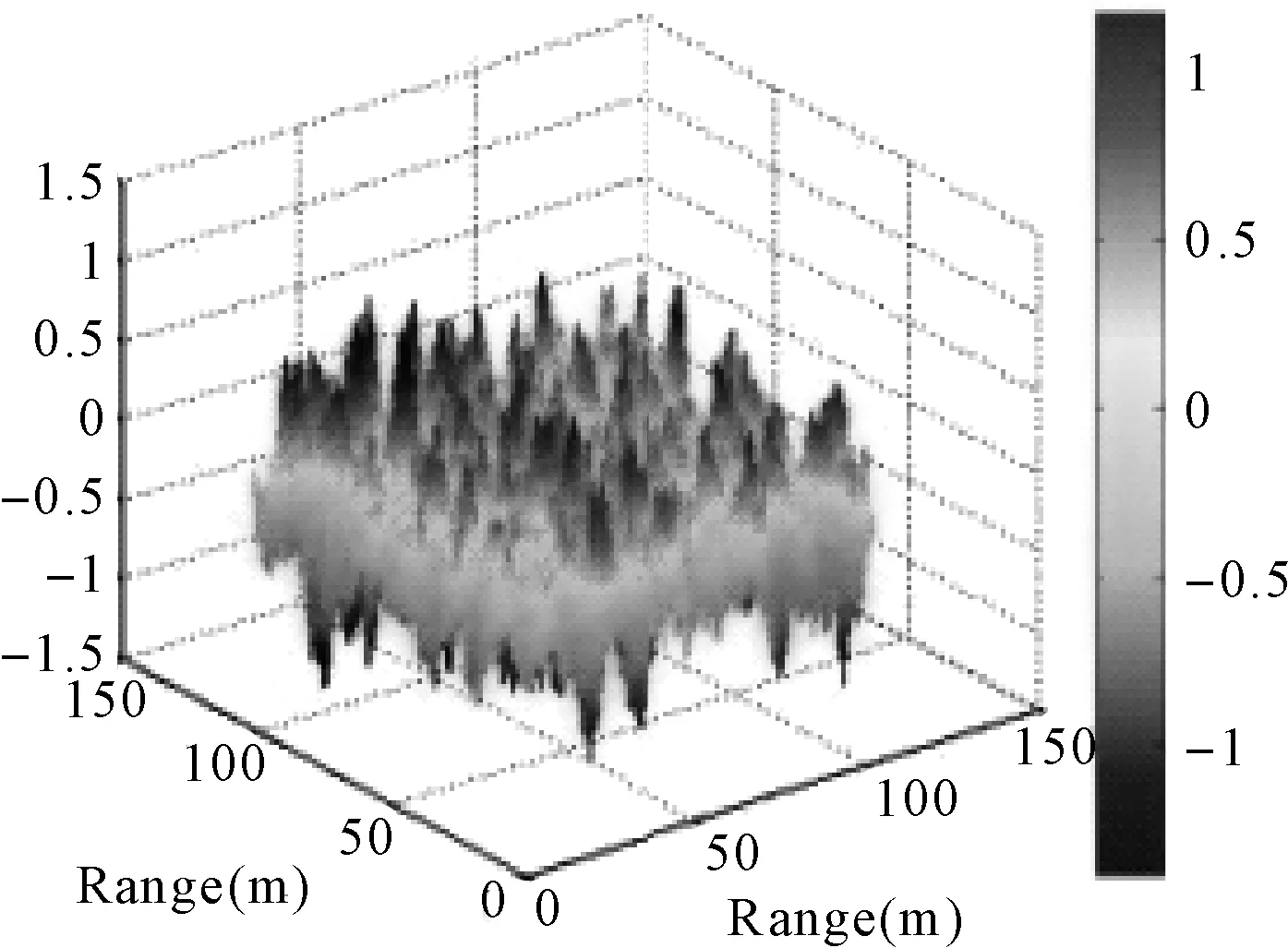
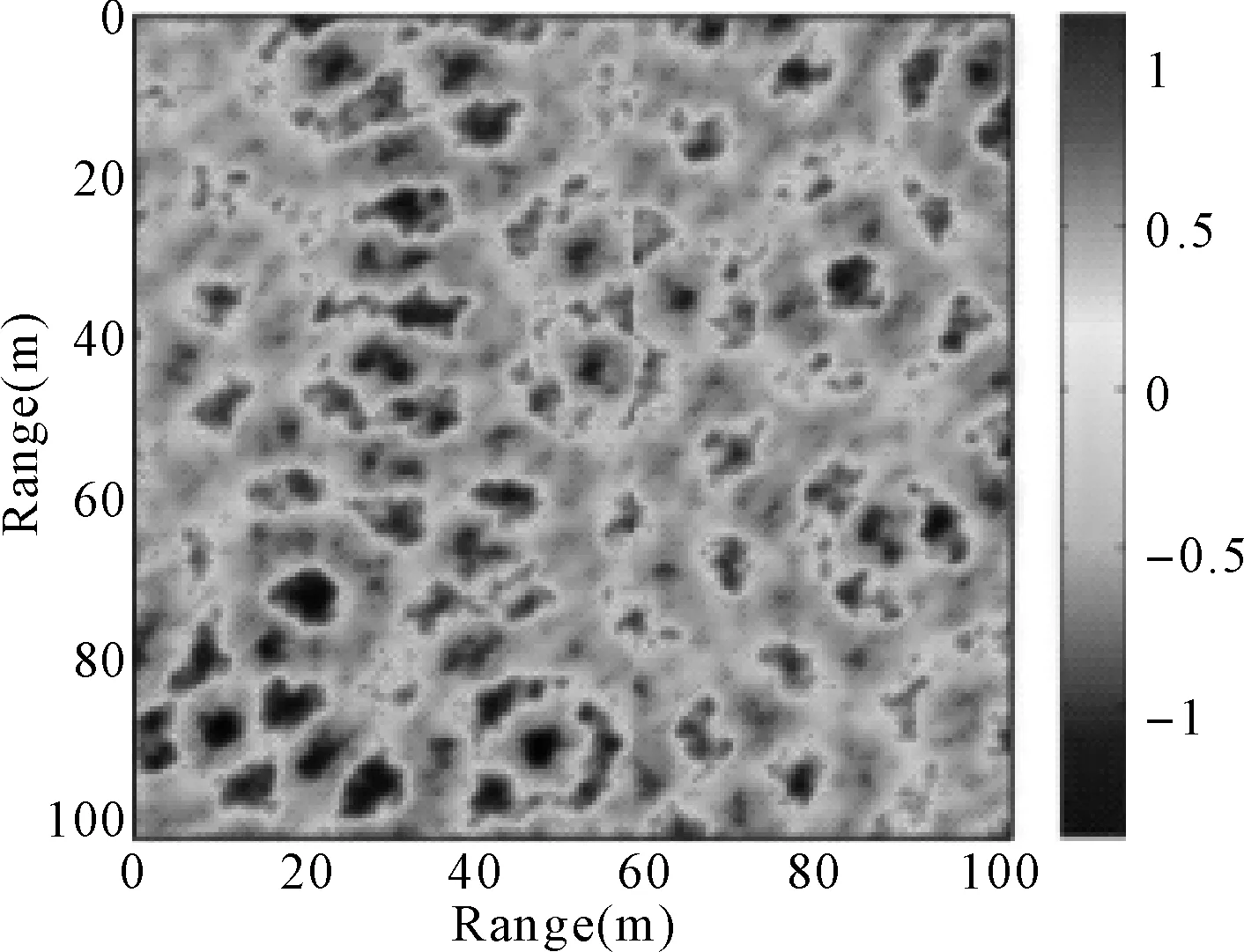
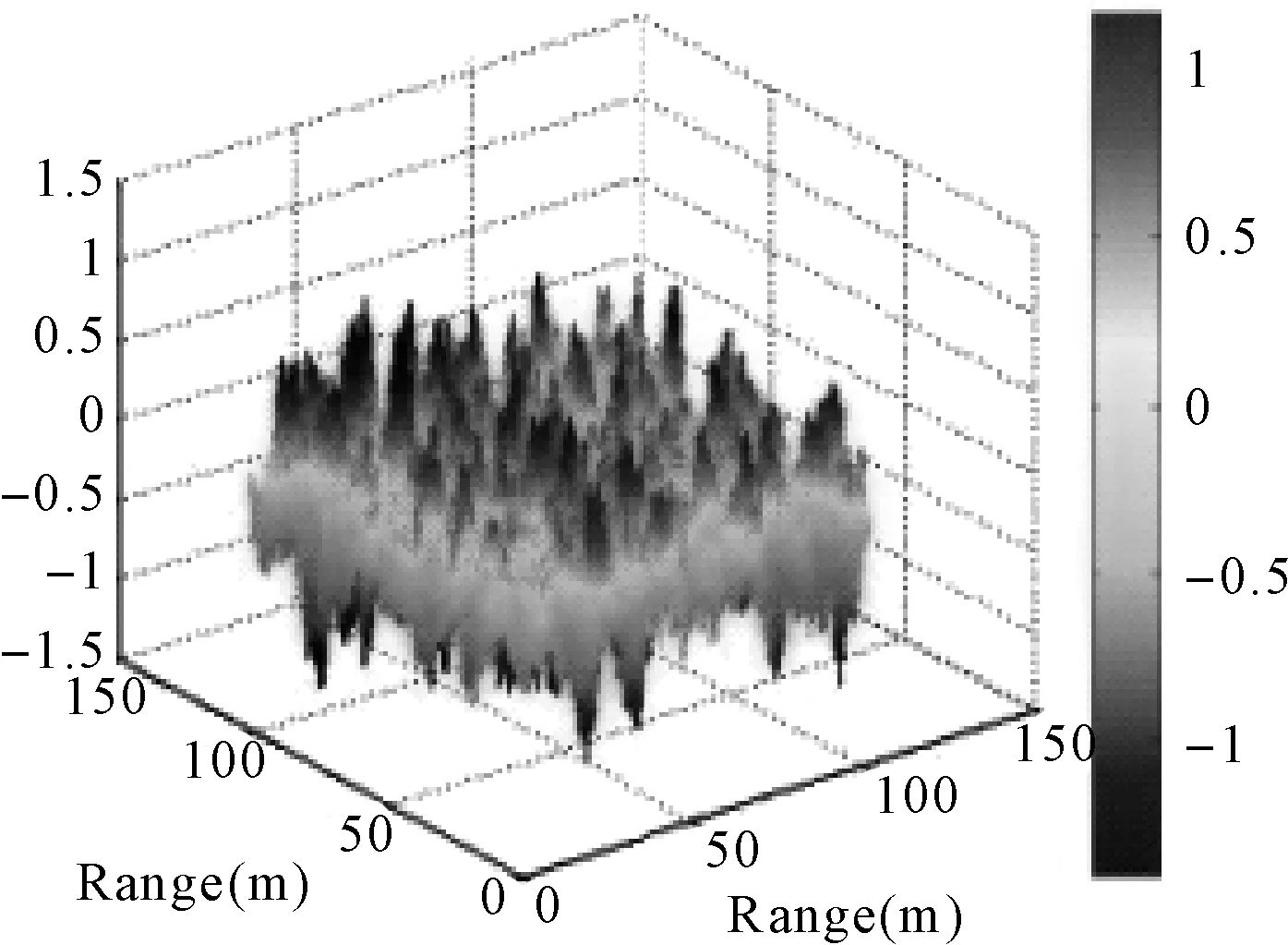
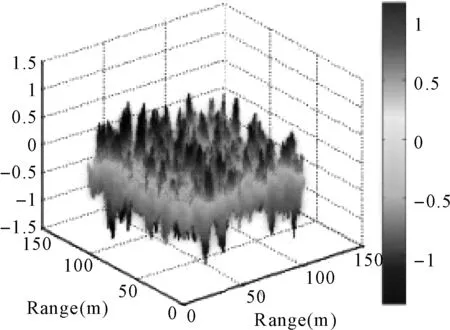
4 尾跡與海洋背景場疊加后的仿真分析
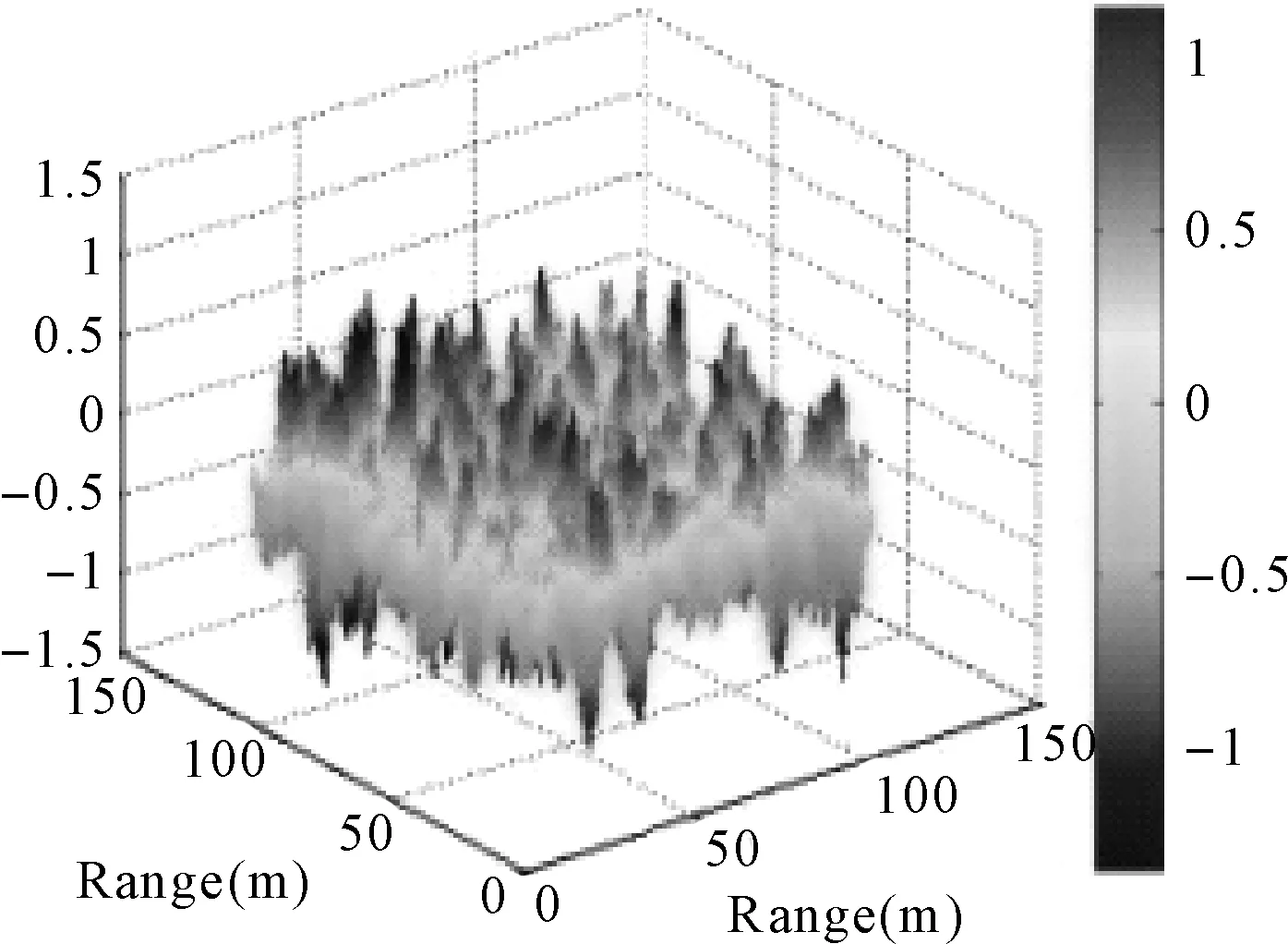
尾跡波的波形不僅與潛艇航速、浮標吃水深度、海水粘滯系數直接相關,而且還受到海洋背景場的影響。下面在原仿真的基礎上,將不同航速、不同吃水深度、不同粘滯系數的浮標尾跡波分別疊加海表面風速3m/s(2級海況)、9m/s(5級海況),風向45度的海洋背景場,對結果進行比對分析。
4.1 不同航速的疊加
1) 風速3m/s,風向45°

(a)V=2kn
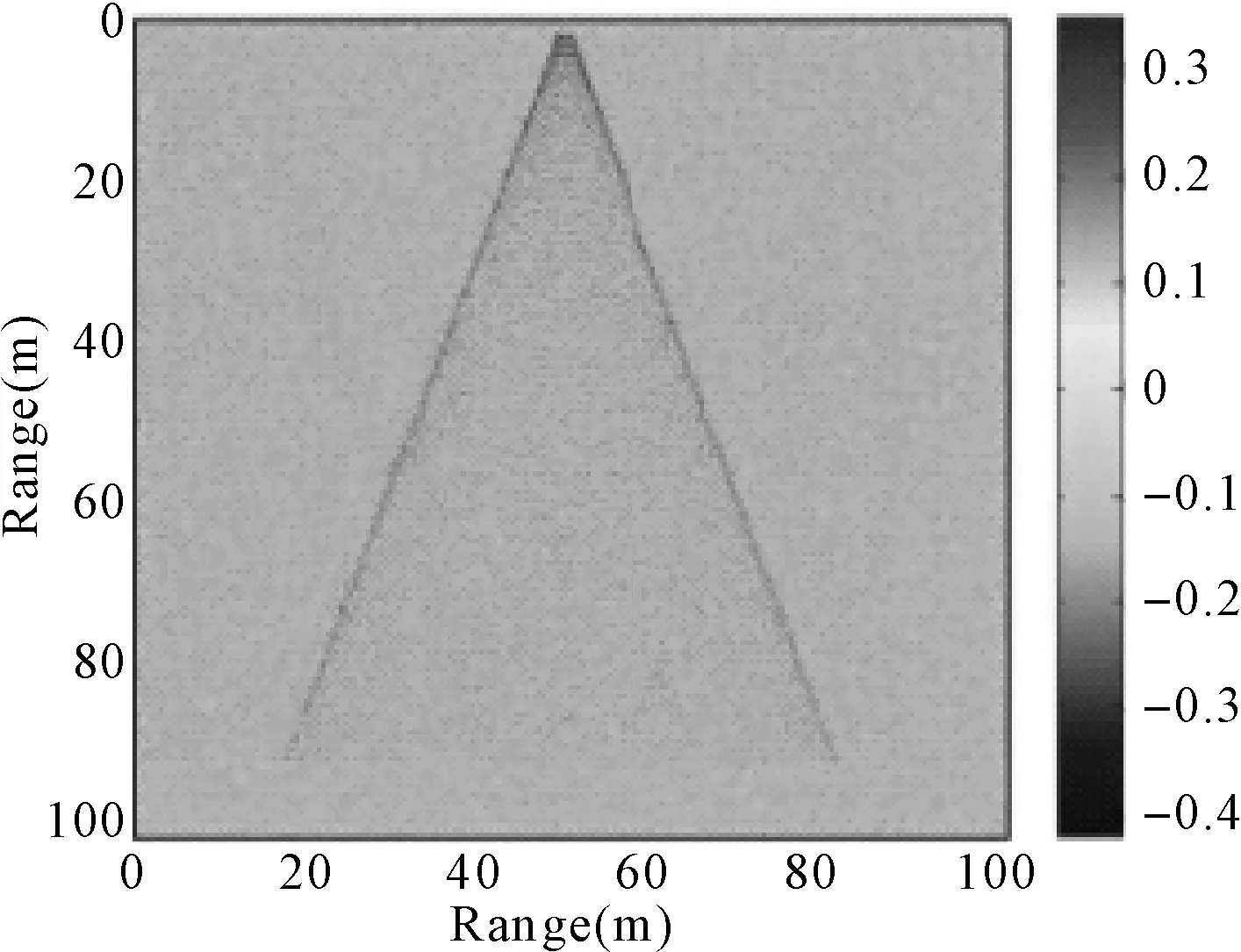
(b)V=5kn
(c)V=8kn
2) 風速9m/s,風向45°

(a)V=2kn
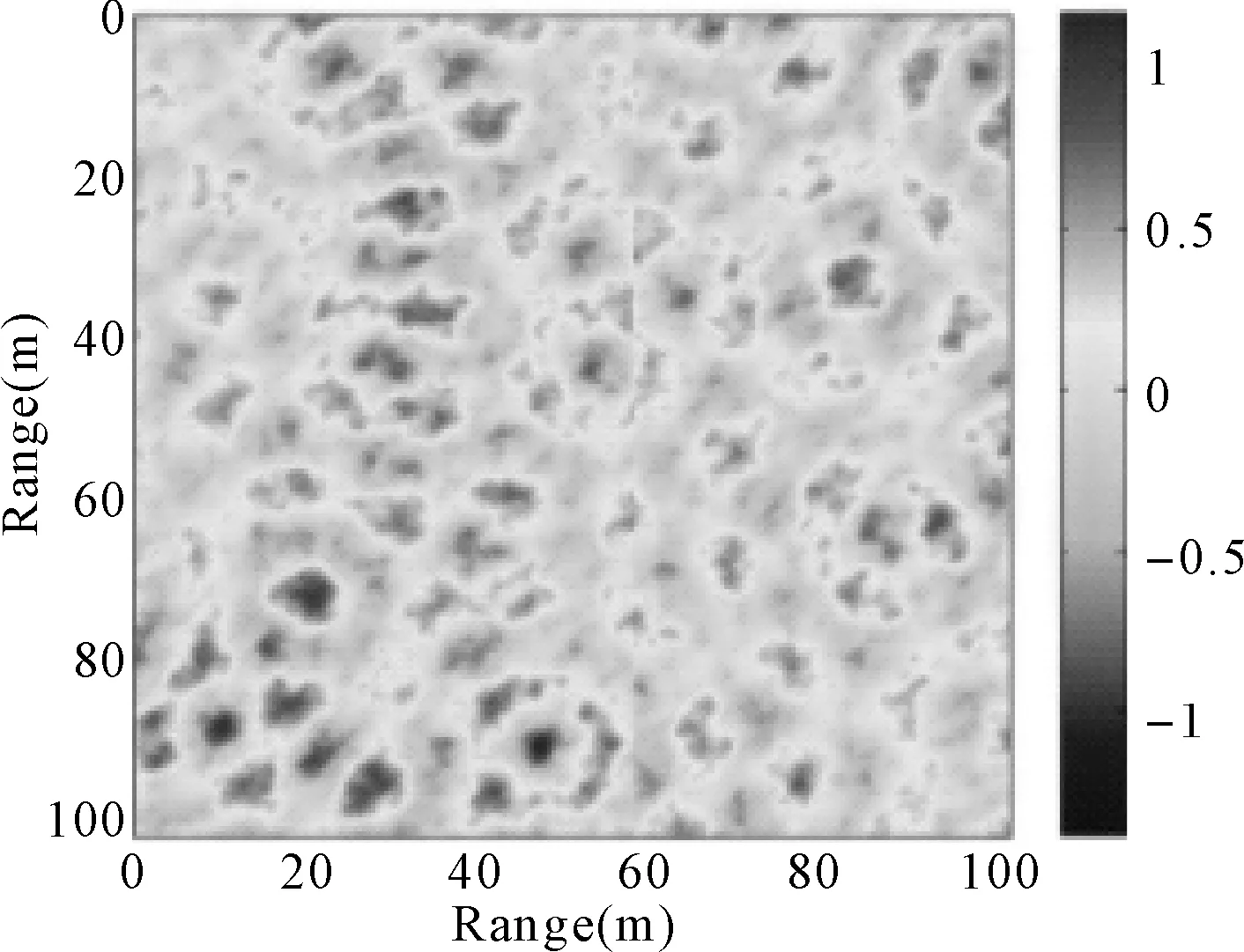
(b)V=5kn

(c)V=8kn
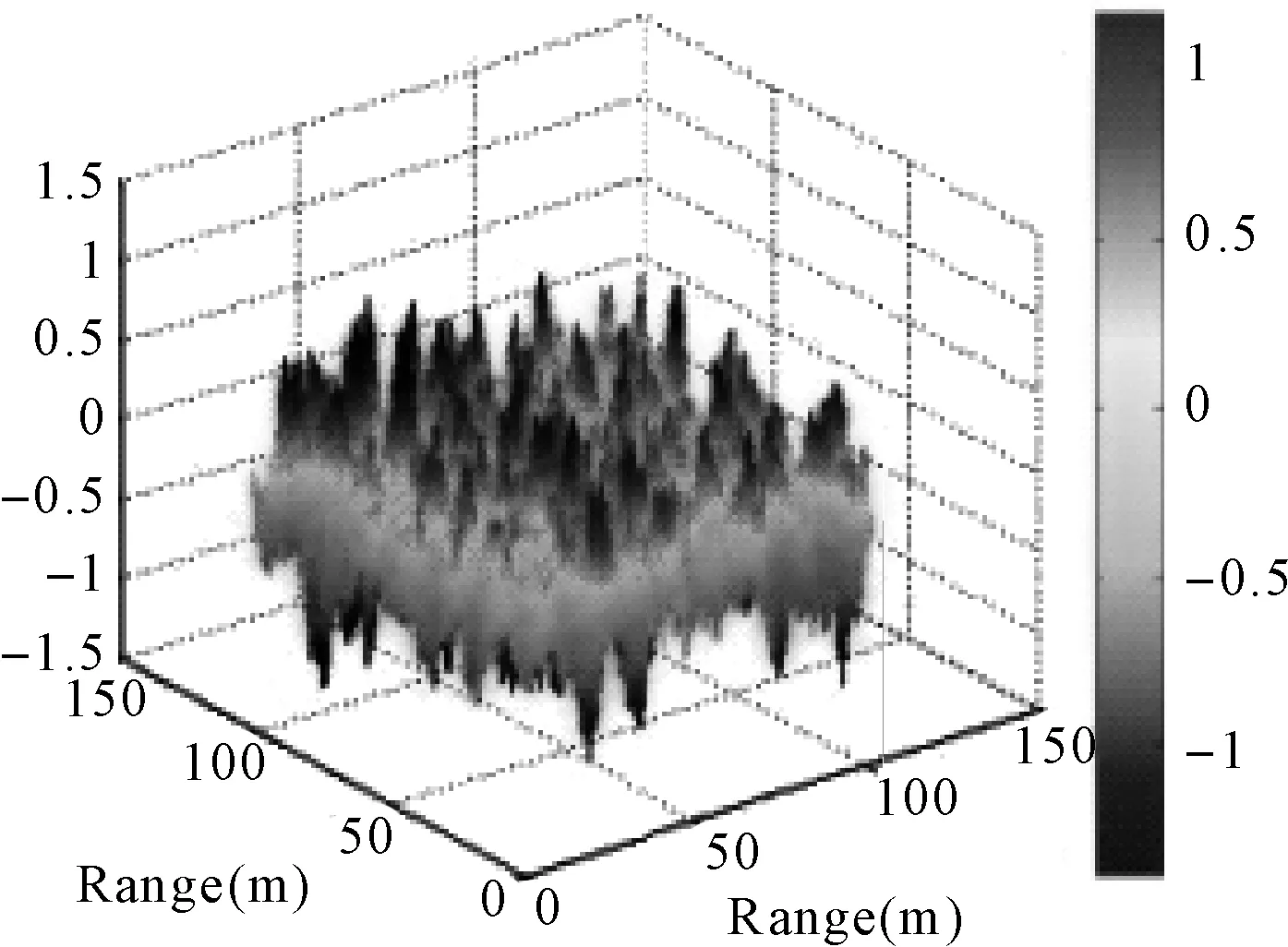
4.2 不同吃水深度
1) 風速3m/s,風向45°

(a)d=0.25m


(b)d=0.5m
(c)d=1m
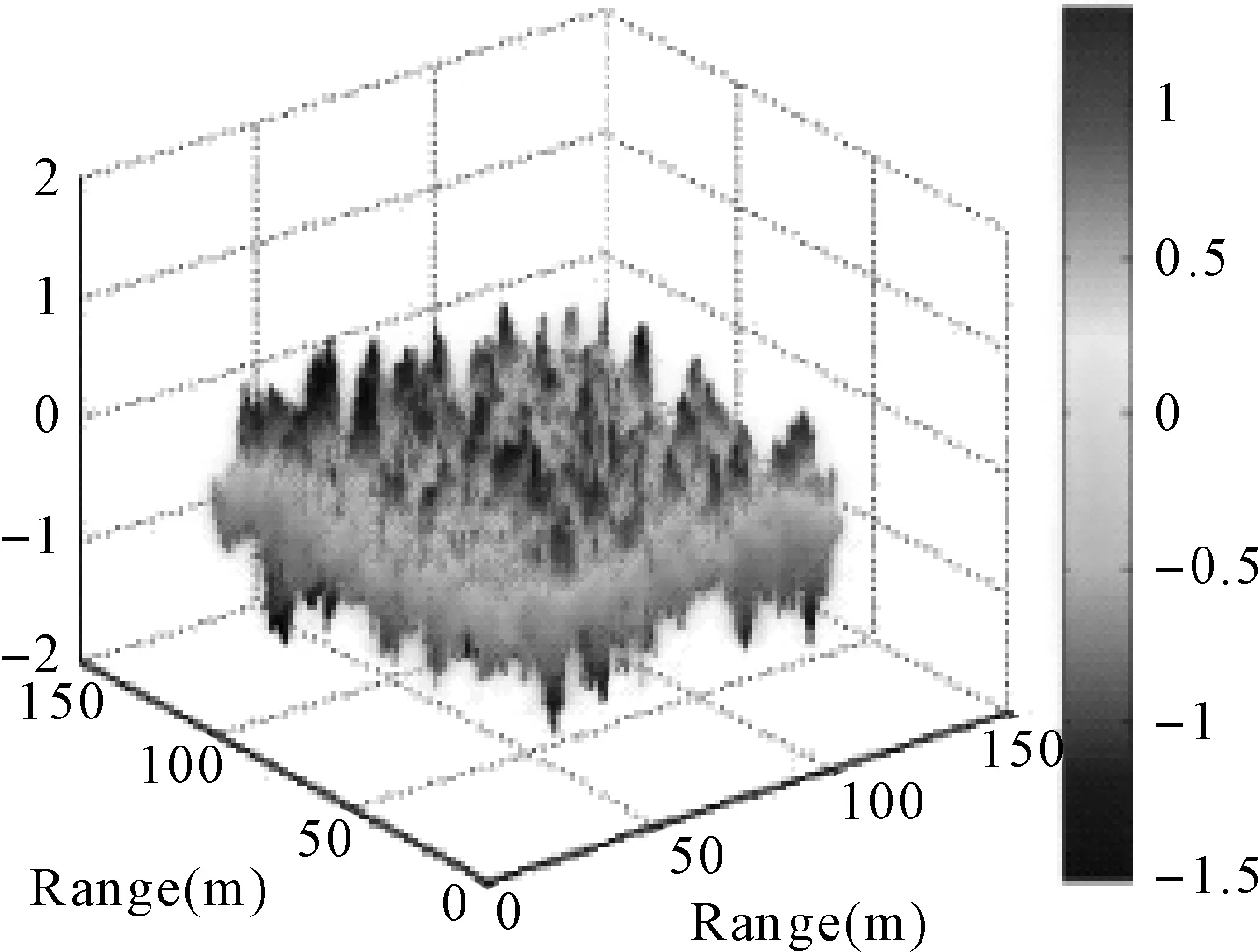
2) 風速9m/s,風向45°

(a)d=0.25m

(b)d=0.5m
(c)d=1m
4.3 不同粘滯系數
1) 風速3m/s,風向45°
(a)C=0.1

(b)C=0.2
(c)C=0.3
2) 風速9m/s,風向45°
(a)C=0.1
(b)C=0.2
(c)C=0.3
可以看出,在2級海況情況下,航速越大,吃水深度越深,粘滯系數越大,波形越明顯,海洋背景場對尾跡波的影響越小;在5級海況情況下,海洋背景場對尾跡波的影響顯著,波形被淹沒。
5 結語
為了提高潛艇的隱蔽性,必須考慮潛艇浮標天線在海面形成的尾跡波被反潛兵力發現而造成的潛艇暴露問題。利用開爾文尾跡仿真模型,對拖曳式浮標海面尾跡進行仿真研究。潛艇航速、浮標吃水深度、海水粘滯系數等因素對浮標尾跡波的影響比較大,相對平靜海況下,當吃水深度一定,隨著航速的增加,尾跡特征越明顯,航速5kn時,浮標尾跡特征已經明顯;當航速一定時,隨著浮標吃水深度越深,尾跡波越明顯,吃水深度1m時尾跡特征明顯;海水粘滯系數越大,尾跡波越明顯,但波形變化不大。從對尾跡波疊加海洋背景場的仿真來看,在2級海況的下,浮標尾跡波形明顯,當海況達到5級時,尾跡波淹沒在海洋背景下。由于缺少與真實的SAR圖像的對比,本文的模型和仿真還有待進一步改進和優化。
[1] 劉新安,羅曼,吳坤興.潛艇通信浮標發展研究[C]//中國通信學會學術年會,2008.
[2] 王光源,馬海洋,李冬.拖曳式通信浮標對潛艇隱蔽性的影響[J].艦船科學技術,2012,34(3):107-110.
[3] 李麗華,王永斌.潛艇拖曳綜合浮標及其關鍵技術[J].艦船電子工程,2005,25(5):23-25.
[4] 羅曼,陳敏慎,曾東.潛艇拖曳通信浮標體應用與發展初探[J].艦船科學技術,2008,30(B11):77-80.
[5] 張建忠,秦建存.浮標通信的仿真與設計[J].無線電通信技術,2012,38(5):74-76.
[6] 鞏彪,黃韋艮.SAR圖像船只尾跡檢測研究綜述[J].遙感技術與應用,2012,27(6):29-36.
[7] 鞏彪,黃韋艮,陳鵬.Kelvin尾跡SAR圖像仿真研究[J].海洋通報,2013,32(2):208-213.
[8] 侯海平,陳標,劉翠華等.海洋背景下開爾文尾跡仿真與分析[J].計算機仿真,2007,24(8):12-15.
[9] 葉文雋.SAR圖像艦船尾跡檢測研究[D].長沙:國防科學技術大學,2009.
[10] 胡召玲,李海權,杜培軍.SAR圖像紋理特征提取與分類研究[J].中國礦業大學學報,2009,38(3):422-427.
Towed Buoy Sea Wake Image Simulation Research
LIU Yan1WANG Yongsheng1LIU Cuihai1SUN Huaqing1HAO Xiaohu2
(1. Navy Submarine Academy, Qingdao 266000)(2. No. 91033 Troops of PLA, Qingdao 266000)
A trail simulation model of towed buoy is established based on the Kelvin ship wake model. Trail simulations on various options, i.e. speed, navigation depth and viscous coefficient, are made combined with ocean background field to gain wake diagram for analysis. The results show that, considering only the wake model, the transverse wave arises with the navigation speed within a range when depth is certain, the wake varies a lot with the depth when the navigation speed is certain.
towed buoy, wake model, simulation analysis
2016年8月10日,
2016年9月18日
劉巖,女,碩士研究生,助理工程師,研究方向:軍事通信。王永生,男,碩士,教授,研究方向:軍事通信。劉翠海,男,碩士,副教授,研究方向:軍事通信。孫華慶,男,碩士研究生,研究方向:磁異常信號檢測。郝曉虎,男,助理工程師,研究方向:軍事通信。
TN92
10.3969/j.issn.1672-9730.2017.02.017
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57
