可穿戴上肢外骨骼機器人的算法和仿真
2017-03-02 05:40:08張恕遠呂光遠
自動化儀表 2017年2期
關鍵詞:信號
吳 攀,張恕遠,譚 越,李 瀟,劉 川,鄧 勇,呂光遠
(1.西華大學機械工程學院,四川 成都 610039;2.95685部隊,云南 昆明 650000;3.成都航天通信設備有限責任公司,四川 成都 610051)
可穿戴上肢外骨骼機器人的算法和仿真
吳 攀1,張恕遠1,譚 越1,李 瀟2,劉 川3,鄧 勇1,呂光遠1
(1.西華大學機械工程學院,四川 成都 610039;2.95685部隊,云南 昆明 650000;3.成都航天通信設備有限責任公司,四川 成都 610051)
針對可穿戴上肢外骨骼機器人的傳統PID控制算法穩定時間長、偏差較大等特點,分析了可穿戴上肢外骨骼工作原理和結構,建立了人體上肢外骨骼的控制模型,提出了具有自適應性、精確性、快速響應性等特點的自抗擾控制算法,從而達到外骨骼快速跟隨手臂和手臂平穩控制外骨骼的目的。通過對PID算法、非線性跟蹤微分器(TD)、非線性擴張狀態觀測器(ESO)、自抗擾控制算法的理論分析和Matlab仿真,得到了更直觀的運動學數據:關節的最大偏差和達到穩定的時間。比較分析這幾種算法的數據可知,自抗擾控制具有響應迅速、動態補償、超調量小的優點。制作了試樣關節、控制電路、驅動電路,并編寫了對應的調試程序。試驗結果表明,自抗擾控制算法可以更好地控制上肢外骨骼機器人,具有良好的實際控制效果。
機器人; 可穿戴上肢外骨骼; 智能控制; 控制算法; 自抗擾; PID算法
0 引言
上肢關節的控制算法作為整個外骨骼機器人系統的“靈魂”,關系到系統的穩定性和安全性。可穿戴上肢外骨骼作為輔助人體的機械設備,可跟隨手臂運動,輔助搬運物體。在此過程中,搬運的物體質量存在不確定性,系統的摩擦力隨外界溫度、系統的使用時間變化也存在不確定性[1]。
針對上述系統的時變特點,需要控制算法具有自適應性、精確性、快速響應性,使外骨骼快速跟隨手臂。由于傳統的PID算法輸入信號為差值,輸出的快速性和超調性存在矛盾,所以PID算法存在一定的缺陷。由于手臂存在柔性,從控制整體的精度來看,控制精確性要求不高。但是控制過程中的超調量(過沖),特別是在卸載過程中,會對手臂造成傷害。因此,選擇自抗擾控制算法來實現對關節的快速、精確、平穩控制。
1 PID控制算法的理論基礎和仿真實現
PID控制算法是較常用的算法。本文通過PID控制算法對外骨骼進行控制,再觀察控制結果,從而對機械骨骼特性有更直觀的認識[1-2]。
PID控制率為:
(1)
整理得到:
(2)
式中:u(t)為輸出,在這里為轉矩;e(t)為控制器輸入的偏差信號;kp、ki、kd分別為比例、積分和微分所占比例系數,這三個系數的選取關系到算法的響應速度、超調量和靜差。
建立控制模型,關于轉矩的方程為:
(3)

為了簡化過程,先忽略摩擦力和外部擾動,數學模型中的參數和動力學仿真中相同。
初始條件kp、ki、kd分別為150、120、20,關節3的角度不變,關節4的階躍為90°。觀察階躍響應下的輸出比較如圖1所示。
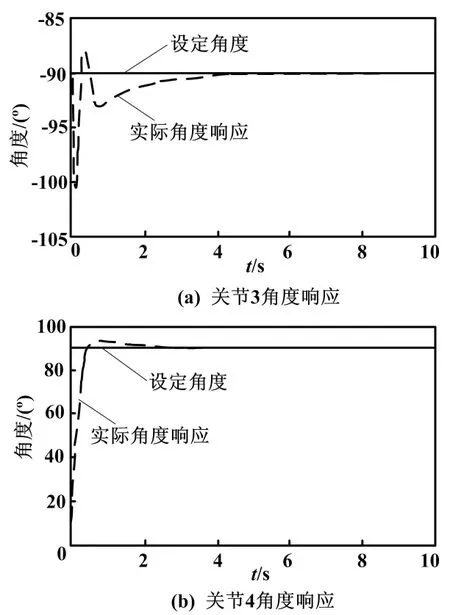
圖1 采用PID控制算法的關節角度響應曲線圖
從圖1可以看出,加入積分分量可消除靜差,但是積分分量在消除靜差的同時也帶來了超調,且誤差越大積分越快。如果在平衡位置積分量過大會造成超調,超調的誤差為負誤差,積分量減小,從而漸漸達到平衡。
關節3的角度響應如圖1(a)所示,出現誤差后積分分量作用于積分,出現超調后積分分量減小,角度也減小,積分逐步穩定。此過程太慢且不穩定,6 s后完全消除了靜差。關節4的角度響應如圖1(b)所示,在3 s后完全消除了靜差,從而達到穩定。
2 自抗擾算法的理論和仿真
自抗擾控制器[4]由非線性跟蹤微分器(tracking differentiator,TD)[5]、非線性擴張狀態觀測器(extended state observer,ESO)[6]和非線性PID組合[7]而成。
非線性跟蹤微分器對輸入信號進行跟蹤和微分,同時具有濾波的作用,可用于對系統控制的輸入信號進行過渡和濾波,并得到輸入信號的微分。
非線性擴張觀測器完成對系統未知干擾和不確定部分的估計。
非線性PID組合是在非線性范圍內尋找更優的組合形式。其中,非線性跟蹤微分器和觀測補償是控制器的必備和主要功能,非線性PID組合形式可結合自身功能需要確定[8]。
2.1 非線性TD的理論基礎和仿真實現
韓京清教授設計的跟蹤微分器可對階躍信號完成過渡處理,并對輸入信號進行濾波,最終得到其微分。
x1(k+1)=x1(k)+hx2(k)
(4)
x2(k+1)=x2(k)+h×fst{[x1(k)-v(k)],x2,δ}
(5)
式中:x1為跟蹤信號;h為采樣周期;x2為跟蹤的微分信號;fst{[x1(k)-v(k)],x2,δ}為最速控制的綜合函數;v為輸入信號;δ為跟蹤輸入函數快慢的參數,數值越大表示跟蹤越快。
利用Matlab對加入干擾的階躍信號進行跟蹤。確定采樣周期h=0.01,δ=250,干擾信號為隨機信號,幅度為0.5,階躍信號幅值為10。跟蹤信號仿真結果如圖2所示。
由圖2(a)可知,輸出信號能夠平穩地跟蹤階躍信號完成過渡過程,并濾除干擾信號以還原原始信號。由圖2(b)可知,與跟蹤信號對比,微分有明顯的加速和減速過程,完成微分量穩定到0的過渡,且基本不受干擾影響。
2.2 ESO的理論基礎與仿真實現
在外骨骼的控制系統運行過程中,變量無法在線測試并存在未知的外部擾動,對控制有很大的干擾和影響。如果能將這些變化量統一地表示出來,補償到控制輸出中以消除外部不確定因素的影響,則可以提高系統的控制精度和適應性。觀測器的作用是估計系統中不能直接測量的狀態變量。
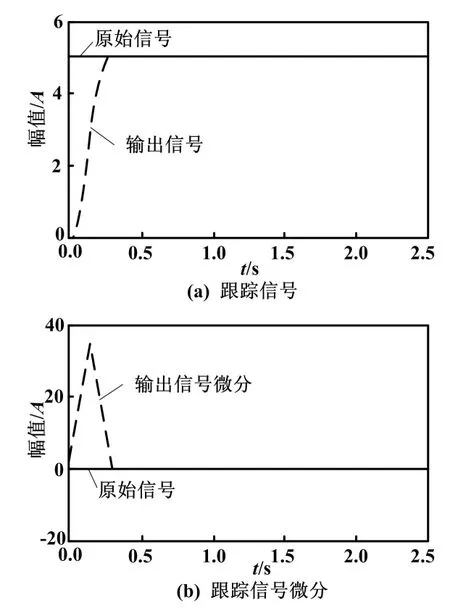
圖2 跟蹤信號仿真結果
根據韓京清教授所設計的擴張狀態觀測器,動力關節是一個獨立的控制單元,所以輸入和輸出都應該為該關節自身可以檢測的量,關節間的力擾動、外部干擾等均采用觀測器作為外部擾動進行觀測。動力關節模型表示為:
x1=x2
(6)
x3=x4
(7)
x2=f1(x,u2)+b1u1
(8)
x4=f2(x,u1)+b2u2
(9)
y1=x1
(10)
y2=x2
(11)
式中:[x1x2x3x4]=[θ3θ3θ4θ4];f1(x1,u2)、f2(x,u1)分別為關于[x1x2x3x4]和關節輸入轉矩[u1u2]的復雜函數,很難直接確定函數參數。因此,把不確定的外部擾動和內部擾動作為未知參數。ESO可表示為:
e=z1-y
(12)
z1=z2-β1e
(13)
z2=z3-β2fal(e,α1,δ)+bu
(14)
z3=-β3fal(e,α2,δ)
(15)
式中:fal(e,α,δ)為飽和函數。將β1=100、β2=250、β3=800、δ=0.01代入ESO函數中,其他的模型參數原理也是一樣。利用Matlab進行仿真,將動力學模型用S函數Model表示[9],同時也將觀測器需要觀測的部分輸出,以便查看觀測器是否正確運行。
將觀測器的輸出代入PID控制中進行補償,只要將PID控制器中的kp、ki、kd分別設為150、0、20,即可得關節角度響應曲線如圖3所示。
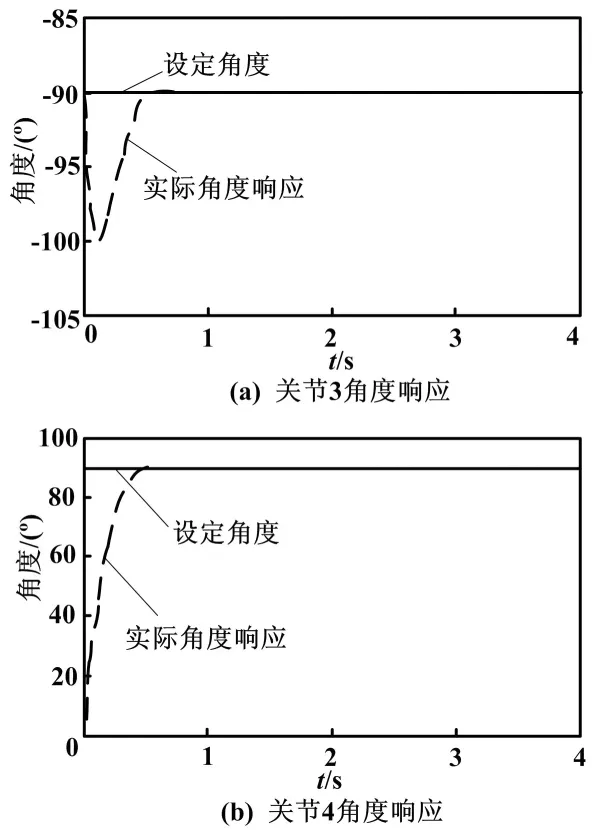
圖3 采用ESO的關節角度響應曲線圖
圖3(a)為關節3的角度響應曲線圖。關節3受到關節4的作用力向負方向運動,最大角度為-100°,最大偏差為10°,小于單純PID控制的關節3偏差,在0.6 s后達到穩定且無明顯超調。圖3(b)為關節4的角度響應曲線圖。關節4設定的目標角度為90°,在0.5 s內快速、平穩到達設定角度,并且無超調。
2.3 自抗擾控制算法的仿真實現
將非線性PID、擴張觀測器和非線性跟蹤微分器三者有機地組合在一起,形成自抗干擾控制器。自抗干擾器電路[10]如圖4所示。
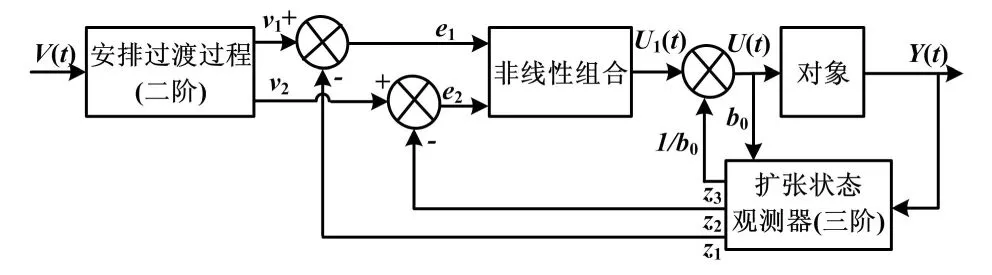
圖4 自抗干擾器電路圖
圖4中:V(t)為輸入信號;Y(t)為輸出信號;v1能夠快速無超調跟蹤上輸入信號;b0為比例增益;v2為v1的一個微分信號;z1為y的觀測量;z2為控制器的y的微分的觀測量。
利用Matlab進行仿真[11],仿真條件和上文一致,得到結果如圖5所示。關節3受到關節4的作用力,向負方向運動最大達到-95°,最大偏差為5°,比單純使用觀測器的偏差要小,在0.7 s后達到穩定且無明顯超調。關節4設定的目標角度為90°,在0.6 s內快速平穩到達設定角度且無超調。
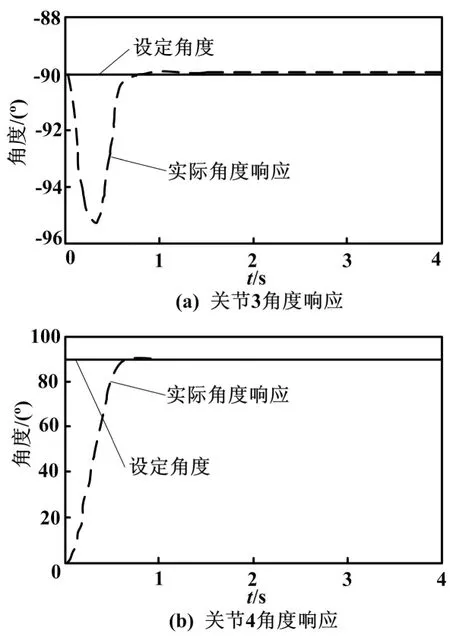
圖5 采用自抗擾控制算法的關節角度響應曲線圖
外骨骼關節在PID算法和自抗擾算法中的數據對比如表1所示。
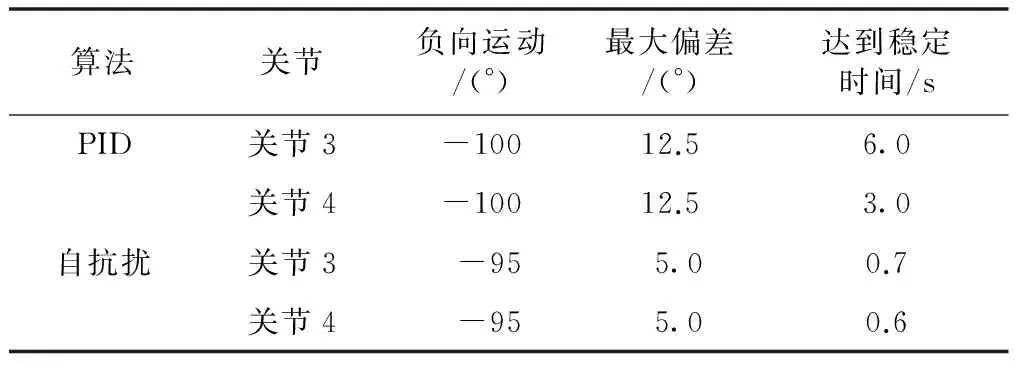
表1 PID算法和自抗擾算法的數據對比
相對于PID算法,自抗擾控制具有響應迅速,超調量小的優點[12]。其觀測器可以實現對外部干擾和不確定參數的估計,以及控制系統的動態補償。對外骨骼動力關節的控制具有重要的意義。
3 可穿戴上肢外骨骼試驗
為了對可穿戴上肢外骨骼動力關節進行進一步的分析,設計并建立試驗平臺,制作動力關節試驗樣品,驗證了動力關節控制算法及特性。
首先對系統控制電路板進行焊接調試,測試電路的基本功能。檢測PWM輸出、MOS管驅動器是否工作,并完成電流采集放大電路的放大倍數調節等。然后,制作動力關節加工試驗樣品。無刷電機通過關節的齒輪減速器輸出動力,編碼器通過白色的塑料安裝架安裝在電機上面。通過安裝在主軸上的磁編碼器檢測關節角度,將總質量為7 kg的鋁排作為關節的負載進行驅動,達到了理想的驅動效果。
4 結束語
針對傳統PID控制器對外骨骼動力關節控制存在的對部干擾敏感、超調過大和響應過慢等問題,利用自抗擾控制算法設計了自抗擾控制器,實現了對外骨骼動力關節的控制。在對可穿戴上肢外骨骼結構設計及控制算法進行研究的基礎上,建立試驗平臺,制作動力關節樣品,驗證動力關節控制算法及特性。試驗結果表明,動力關節驅動能力強,完全滿足要求;控制算法對輸入信號響應迅速且無明顯超調。
[1] ASTROM K J,HAGGLUND T.PID controllers:theory,design and tuning[M].Instrument Society of America,1995.
[2] RAD A B,LO W L.Predictive PI controller[J].INT J Control,1994,60(5):953-975.
[3] 劉金琨.先進PID控制及其Matlab仿真[M].3版.北京:電子工業出版社,2002.
[4] 韓京清,王偉.跟蹤微分器[J].系統科學與數學,1994,14(2):177-183.
[5] 韓京清.從PID技術到“自抗擾控制”技術[J].控制工程,2002,9(3):13-18.
[6] 韓京清.一類不確定對象的擴張狀態觀測器[J].控制與決策,1995,10(1):85-88.
[7] 韓京清.非線性PID控制器[J].自動化學報,1994,20(4):487-490.
[8] 韓京清.非線性狀態誤差反饋控制律—NlsEF[J].控制與決策,1995,10(3):221-225.
[9] 馮惕,王儉.基于S-函數計算機控制算法的Simulink仿真[J].福建電腦,2006(12):117-118.
[10]韓京清.自抗擾控制器及其應用[J].控制與決策,1998,13(1):19-23.
[11]薛定宇,陳陽泉.基于Matlab/simulink的系統仿真技術與應用[M].北京:清華大學出版社,2002.
[12]韓京清.自抗擾控制技術[J].前沿科學,2007(1):25-32.
Algorithm and Simulation of Wearable Upper Limb Exoskeleton Robot
WU Pan1,ZHANG Shuyuan1,TAN Yue1,LI Xiao2,LIU Chuan3,DENG Yong1,LGuangyuan1
(1.School of Mechanical Engineering,Xihua University ,Chengdu 610039,China;2.95685 Troops,Kunming 650000,China; 3.Chengdu Space Communication Equipment Co.,Ltd.,Chengdu 610051,China)
According to the characteristics of the traditional control algorithm of wearable upper limb exoskeleton robot,i.e.,long stable time and large deviation,the operational principle and structure of the wearable upper limb exoskeleton are analyzed,and the control model of human upper limb exoskeleton is set up,the auto-disturbance-rejection control algorithm featuring adaptive,accurate,and fast response is put forward,which achieves the purpose that exoskeleton fast follows up the arm,and the arm smoothly controls exoskeleton.Though the theoretical analysis and MATLAB simulation of PID algorithm,nonlinear tracking differentiator,nonlinear extended state observer,and auto-disturbance-rejection control algorithm, more intuitive kinematic data are obtained:maximum deviation of the joints,the period for reaching stable state.Comparative analysis of the data of these several kinds of algorithms shows that the immunity control has the advantages of quick response,dynamic compensation and less overshoot.The sample joint,control circuit and drive circuit are fabricated,and corresponding debugging program is written,to verify that the auto-disturbance rejection control algorithm can better control the upper limb exoskeleton robot with practical control effects.
Robot; Wearable upper limb exoskeleton; Intelligent control; Control algorithm; Auto-disturbance-rejection; PID algorithm
四川省教育廳基金資助項目(JYBFX-YQ-1)
吳攀(1990—),男,在讀碩士研究生,主要從事機電一體化方向的研究。E-mail:960496380@qq.com。
TH132;TP273
A
10.16086/j.cnki.issn 1000-0380.201702011
修改稿收到日期:2016-10-21
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
