一種新的被控混沌系統(tǒng)抗干擾控制器設計方法
2017-02-27 11:40:08王銀河
計算機測量與控制 2017年1期
王 頎,王銀河
(廣東工業(yè)大學 自動化學院,廣州 510006)
一種新的被控混沌系統(tǒng)抗干擾控制器設計方法
王 頎,王銀河
(廣東工業(yè)大學 自動化學院,廣州 510006)
針對一類動態(tài)混沌系統(tǒng),在干擾幅值增大而影響被控混沌系統(tǒng)鎮(zhèn)定的情況下,提出了一種利用補償控制系統(tǒng)(敏感系統(tǒng))抑制干擾幅值影響的控制設計方法. 這種方法首先將該敏感系統(tǒng)與原被控混沌閉環(huán)系統(tǒng)互聯(lián),然后通過設計敏感系統(tǒng)的自適應狀態(tài)反饋控制器,以保證被控混沌閉環(huán)系統(tǒng)在干擾幅值增加的情況下仍能夠漸近保持原有的穩(wěn)定性;最后,通過仿真實例進一步驗證了文章結論的有效性。
混沌系統(tǒng); 漸近穩(wěn)定; 干擾幅值抑制
0 引言
在控制理論研究領域,混沌作為非線性動態(tài)系統(tǒng)的一種狀態(tài)行為表現(xiàn),其特性與控制策略已經(jīng)在諸如生物、經(jīng)濟、通訊等領域中得到廣泛應用[1-3]。一方面混沌自身所具有的偽隨機特性與同步控制相結合可以產(chǎn)生信號保密傳輸?shù)姆椒╗4],另一方面,混沌的非線性特性往往會導致被控系統(tǒng)失穩(wěn),因此在一些工程應用中,鎮(zhèn)定混沌系統(tǒng)成為首要任務,其中利用狀態(tài)反饋方法鎮(zhèn)定混沌系統(tǒng)是一種常用的方法[1,5-8]。值得注意的是,系統(tǒng)運行過程中往往還會受各種干擾的影響,干擾強度的增加也會導致閉環(huán)系統(tǒng)失穩(wěn),例如,一個穩(wěn)定的閉環(huán)網(wǎng)絡在受到外界干擾時會失去穩(wěn)定[9];磁懸浮列車在轉彎時,受到各種載荷干擾嚴重時同樣會導致系統(tǒng)的失穩(wěn)[10];文獻[11-12]也討論了穩(wěn)定的系統(tǒng)在受到外界干擾時會失去穩(wěn)定。因此,如何設計一種能夠抑制干擾的控制器以保證閉環(huán)系統(tǒng)穩(wěn)定運行是一個值得研究的問題。
干擾抑制是控制理論中的基礎問題,該問題是1976年首先由Francis和Wonham針對線性系統(tǒng)提出[13]。隨后,干擾抑制問題擴展到了非線性系統(tǒng)的情形[14-17]。這些研究都假定了干擾源遵循某種已知的動態(tài)方程。但是,在實際工程中,確定干擾源的動態(tài)方程往往是比較困難的,因此,在干擾源動態(tài)方程未知的情況下如何設計一種能夠抑制干擾的控制器以保證閉環(huán)系統(tǒng)穩(wěn)定運行是完全必要的。
本文針對一類動態(tài)混沌系統(tǒng),在干擾頻率不變而幅值增加的情形下,在原有線性反饋穩(wěn)定控制的基礎上,提出一種新的干擾抑制控制方法,其特點在于當被控閉環(huán)系統(tǒng)受到外界干擾幅值增大而失去穩(wěn)定時,通過將一個帶有控制的敏感系統(tǒng)與原系統(tǒng)互聯(lián)的方式,使閉環(huán)系統(tǒng)重新恢復穩(wěn)定。
本文的安排如下:第一節(jié)中,我們給出了一類混沌系統(tǒng)的動態(tài)方程以及線性反饋穩(wěn)定控制器的表達形式,提出在外界干擾幅值增大的作用下,閉環(huán)混沌系統(tǒng)失穩(wěn)的問題。第二節(jié)中,我們給出了敏感系統(tǒng)的動態(tài)方程形式以及它與被控混沌系統(tǒng)的連接方式。第三節(jié)中,在一些假設條件下給出了干擾抑制控制器的形式,并嚴格證明了在外界干擾幅值增大時,敏感系統(tǒng)與被控混沌系統(tǒng)構成的互聯(lián)閉環(huán)混沌系統(tǒng)保證了被控混沌系統(tǒng)的穩(wěn)定性。最后,第四節(jié)我們通過一個例子來驗證該方法的有效性。
1 提出問題
考慮如下形式的混沌系統(tǒng):
(1)

注意到混沌系統(tǒng)(1)可視為一類非線性系統(tǒng),因此,鎮(zhèn)定混沌系統(tǒng)是穩(wěn)定性理論研究中的首要任務,其中,利用狀態(tài)反饋控制器鎮(zhèn)定混沌系統(tǒng)是常用的方法之一。為此,混沌系統(tǒng)(1)可以改寫為如下形式:
(2)
其中:uk∈Rq為控制輸入,Bk∈Rn×q為已知的控制增益矩陣。
在狀態(tài)反饋控制器中,線性反饋控制器不僅簡單而且易于物理實現(xiàn),因此本文采用如下線性控制器uk:
uk=Kx
(3)

由系統(tǒng)(2)與控制器(3)形成的閉環(huán)系統(tǒng)為:

(4)


(5)

2 系統(tǒng)模型描述與敏感系統(tǒng)設計
考慮如下形式的敏感系統(tǒng):
(6)
其中:狀態(tài)向量ω∈W?Rm,W有界閉集;v=v(t)∈R是連續(xù)的有界干擾;A∈Rm×m是Hurwitz矩陣,B∈Rm是實矩陣;r=(r1r2…rm)T∈Rm是設計常向量;us∈Rm是敏感系統(tǒng)的控制輸入。
將敏感系統(tǒng)(6)與系統(tǒng)(5)互聯(lián)形成如下組合系統(tǒng):
(7a)
(7b)

為敘述方便起見,系統(tǒng)(7b)稱為目標系統(tǒng),系統(tǒng)(7a)稱為系統(tǒng)(7b)的敏感系統(tǒng)。
為了方便敘述,將組合系統(tǒng)(7)在干擾由v變?yōu)閜v前后的動態(tài)模型統(tǒng)一表示為:
(8a)
(8b)

3 敏感系統(tǒng)控制器設計
引入下列誤差量:
(9a)
(9b)
將(9a)和(9b)兩邊分別對時間求導,利用(8)式可得:
(10a)
(10b)

(11a)
(11b)
(11c)

(12)


假設4:(i)對于(8)式中所描述的動態(tài)系統(tǒng),n≤m,即敏感系統(tǒng)的維數(shù)不小于目標系統(tǒng)的維數(shù); (ii)存在兩個正定矩陣Qi、一個n×m的行滿秩矩陣Γ以及正數(shù)λi,μi,i=1,2,滿足下式:
(13a)
(13b)
(13c)
(13d)
其中:Ii,i=1,2是維數(shù)匹配的單位陣;S≤0(S>0)表示矩陣S是負半定(正定)的;λmin(*)表示矩陣*最小的特征值;



(14)

(15)
定義1:設Θ為一列向量,定義如下向量函數(shù)Sign(Θ):
(16)
通過上述定義1,可以知道ΘTSign(Θ)=Θ。當p≠1,利用定義1中的函數(shù),可以設計(8)式中的us:
us=
(17a)

(17b)



定理1:考慮動態(tài)方程(8)。如果假設1-假設4成立,那么在帶有自適應律(17b)的控制器(17a)的作用下有下式成立:
(18a)
(18b)
證明:考慮閉環(huán)系統(tǒng)(12),式中us(t)的值如(17)式中所示。
(19)
假設4:意味著下式成立:
(20)
將(20)式代入(19)中,可得:
(21a)
如果θ≠0,聯(lián)立(15)、(21a)以及(17a)和(17b),可得:
(21b)
如果θ=0,由(15)式以及(17a)、(17b)式,顯然可得:
(21c)

注1: 利用定理1解決混沌閉環(huán)穩(wěn)定系統(tǒng)(4)的受擾系統(tǒng)(5)漸近恢復穩(wěn)定的步驟如下:
步驟1:構造敏感系統(tǒng)(6),并將其與系統(tǒng)(5)互聯(lián)形成組合系統(tǒng)(7);
步驟2:驗證假定1-4,若假定1-4成立則進行下一步,否則本文方法失效;
步驟4:構造帶有自適應律(17b)的控制器(17a)。
4 仿真實例
考慮如下Lorentz混沌系統(tǒng)[22]:
(22)
其中:

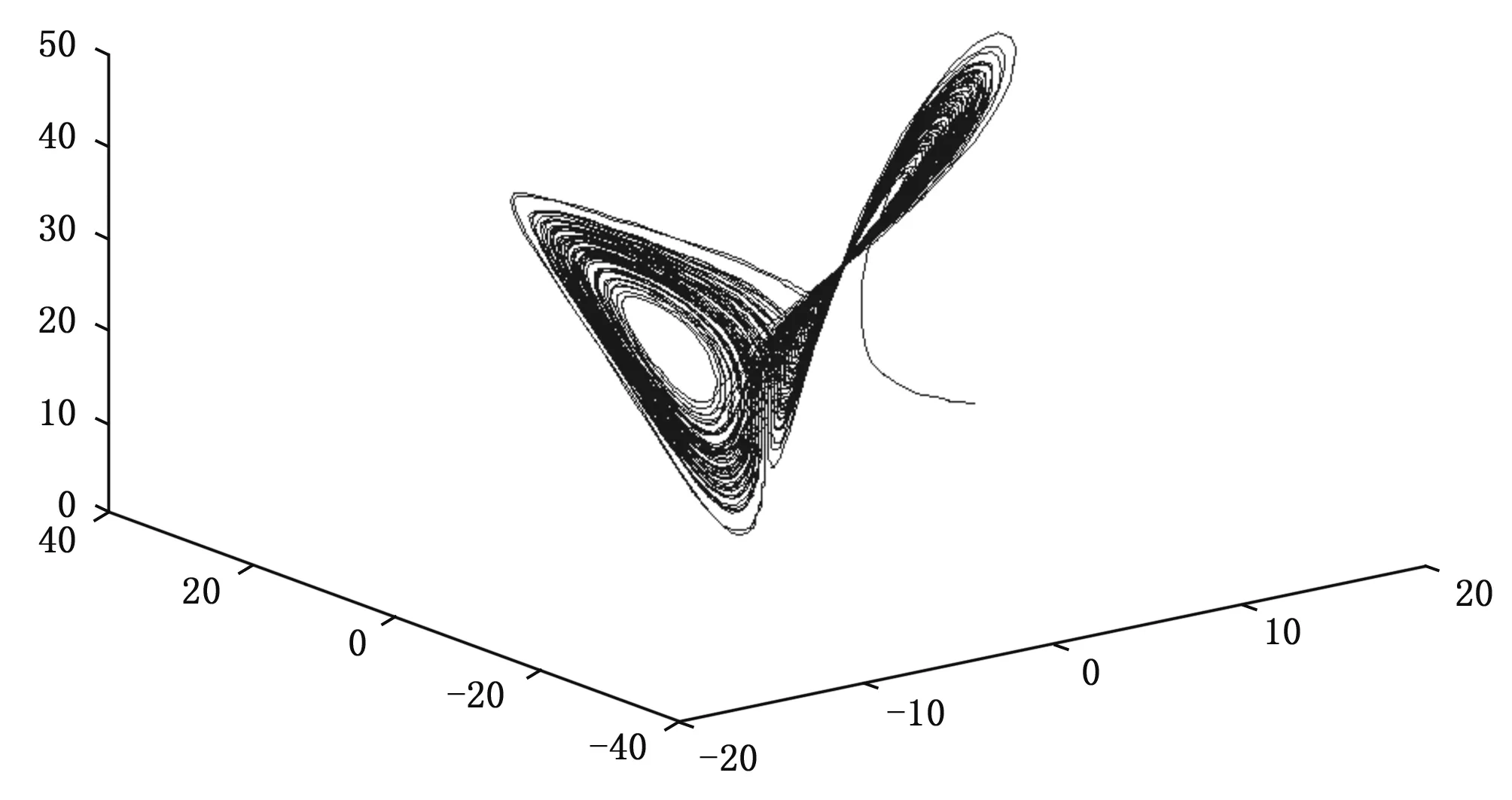
圖1 Lorentz混沌系統(tǒng)相位圖
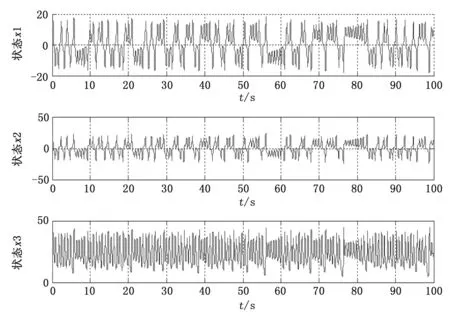
圖2 Lorentz混沌系統(tǒng)狀態(tài)時間響應圖
為Lorentz混沌系統(tǒng)(22)設計線性狀態(tài)反饋控制器uk:
uk=Akx
(23)

控制器(23)與Lorentz混沌系統(tǒng)(22)形成的閉環(huán)系統(tǒng)為:

(24)

線性狀態(tài)反饋控制器(23)保證了閉環(huán)系統(tǒng)(24)的穩(wěn)定性,如圖3所示。

圖3 線性狀態(tài)反饋控制器(23)作用下閉環(huán)系統(tǒng)狀態(tài)時間響應
上圖表明在線性狀態(tài)反饋控制器(23)的作用下,可以使閉環(huán)系統(tǒng)穩(wěn)定。但是在閉環(huán)系統(tǒng)(24)受到外界干擾v=p[|sin(100t)|+1]作用時,若幅值p過大會導致失穩(wěn),如圖4(p=400)。
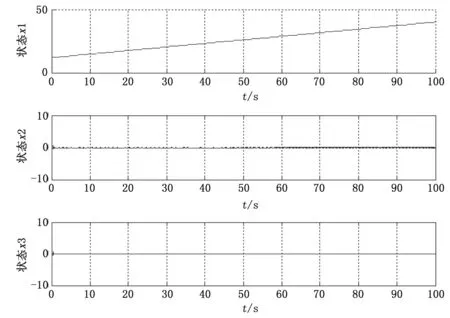
圖4 閉環(huán)系統(tǒng)(24)受大幅值p=400干擾時的狀態(tài)時間響應曲線
圖4表明,當閉環(huán)系統(tǒng)(24)受到的干擾幅值增大到一定程度后,線性狀態(tài)反饋控制器(23)不能鎮(zhèn)定混沌系統(tǒng)。此時,為了使閉環(huán)系統(tǒng)(24)依然保持穩(wěn)定,考慮形如(6)的敏感系統(tǒng),將其與閉環(huán)系統(tǒng)(24)互聯(lián)形成如下組合系統(tǒng):
(26a)
(26b)


圖5 p=400時敏感系統(tǒng)(26a)狀態(tài)響應
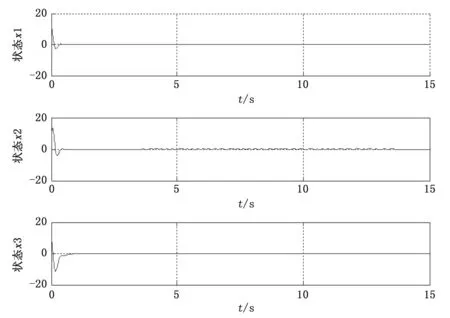
圖6 p=400時目標系統(tǒng)(26b)的狀態(tài)響應
圖5表明,當混沌閉環(huán)系統(tǒng)(24)受到的干擾幅值在t=5時從p=1突變到p=400,控制器up(t)能夠使閉環(huán)系統(tǒng)漸近恢復穩(wěn)定。
5 結論
本文針對一類混沌系統(tǒng),提出了一種能夠抑制干擾幅值變化而恢復穩(wěn)定的控制策略。當混沌系統(tǒng)不受干擾時,可以使用極點配置方法和非線性系統(tǒng)近似線性化方法設計線性狀態(tài)反饋控制器使其鎮(zhèn)定。一般情況下,當鎮(zhèn)定系統(tǒng)受到幅值較小的干擾時,僅僅依靠線性控制器仍然可以保持系統(tǒng)的穩(wěn)定。但是,當干擾的幅值增大時,線性狀態(tài)反饋控制器不能使系統(tǒng)保持穩(wěn)定。在這種情況下,引入一個帶有控制器的敏感系統(tǒng)與原系統(tǒng)互聯(lián),構成一個組合系統(tǒng),使得當原鎮(zhèn)定系統(tǒng)遭遇較大幅值的干擾時仍然能夠保證其漸近恢復穩(wěn)定。
[1] 張 悅, 張慶靈. 基于廣義生物經(jīng)濟系統(tǒng)的混沌控制[J]. 控制與決策, 2007, 22(4): 445-452.
[2] 關新平, 范正平, 陳彩蓮. 混沌控制及其在保密通訊中的應用[M]. 北京: 國防工業(yè)出版社, 2002.
[3] 黃小原. 動態(tài)經(jīng)濟系統(tǒng)中的混沌[J]. 系統(tǒng)工程, 1990, 8(1): 49-54.
[4]KinzelW.,EnglertA.,KanterI.Onchaossynchronizationandsecurecommunication[J].PhilosophicalTransactionsoftheRoyalSocietyA, 2010, 368(1911): 379-389.
[5] 陳立群, 劉延柱. 用精確線性化控制Lorenz混沌[J]. 應用數(shù)學和力學, 1998, 19(1): 63-69.
[6] 李瑞紅, 徐 偉, 李 爽. 一類新混沌系統(tǒng)的線性狀態(tài)反饋控制[J]. 物理學報, 2006,(55)2: 598-604.
[7] 朱志宇. 基于反饋精確線性化的混沌系統(tǒng)同步控制方法[J]. 物理學報, 2005,(55)12: 6248-6252.
[8] 孫常春, 方 勃, 黃文虎. 基于線性狀態(tài)反饋的混沌系統(tǒng)全局控制[J]. 物理學報, 2011, 60(11): 110503.
[9]DingZT.AsymptoticRejectionofGeneralPeriodicDisturbancesinOutput-feedbackNonlinearSystems[J].IEEETransactionsonAutomaticControl, 2006,51(2): 303-308.
[10] 雷思清. 考慮軌道豎曲線引起的載荷干擾的懸浮控制技術研究[D].長沙: 國防科技大學, 2011.
[11] 殷晨波, 周慶敏, 徐海涵, 楊敏. 擬人機器人抗干擾行走穩(wěn)定性分析[J]. 控制與決策, 2006, 21(6): 619-624.
[12]WangP,LiuLH,WuJ,etal.Reentryvehiclemodelingandslidingmodecontrollerdesign[A].Proceedingsofthe5thInternationalConferenceonRecentAdvancesinSpaceTechnologies[C]. 2011: 227-231.
[13]HuangJ.AsymptoticTrackingandDisturbanceRejectioninUncertainNonlinearSystem[J].IEEETransactionsonAutomaticControl, 1995, 40(6): 1118-1122.
[14] 徐曉惠, 張繼業(yè), 施繼忠, 等. 脈沖干擾時滯復值神經(jīng)網(wǎng)絡的穩(wěn)定性分析[J]. 哈爾濱工業(yè)大學學報, 2016, 48(3): 166-170.
[15]DelliPriscoliF,MarconiL,LsidoriA.ANewApproachtoAdaptiveNonlinearRegulation[J].SIAMJournalonControlandOptimization, 2006, 45(3): 829-855.
[16]AlbertoIsidori,LorenzoMarconi,LaurentPraly.Robustdesignofnonlinearinternalmodelswithoutadaptation[J].Automatica, 2012, 48(10): 2409-2419.
[17]DongYi,HuangJie.CooperativeGlobalOutputRegulationforaClassofNonlinearMulti-AgentSystems[J].IEEETransactionsonAutomaticControl, 2014, 59(5): 1348-1354.
[18] 黃麗蓮, 齊 雪. 基于自適應滑模控制的不同維分數(shù)階混沌系統(tǒng)的同步[J]. 物理學報, 2013, 62(8):080507.
[19] 陳帝伊, 申 滔, 馬孝義. 參數(shù)不定的旋轉圓盤在有界擾動下混沌振動的滑模變結構控制[J]. 物理學報, 2011, 60(5): 050505.
[20] 劉 蕾, 張國山. 基于動態(tài)補償?shù)木€性系統(tǒng)最優(yōu)干擾抑制[J]. 控制理論與應用, 2013, 30(7): 808-814.
[21]DouglasE.Crabtree,EmilieV.Haynsworth.AnidentityfortheSchurcomplementofamatrix[J].proc, 1969, 22(2): 364-366.
[22]JamesH.Curry.AgeneralizedLorenzsystem[J].CommunicationsinMathematicalPhysics, 1978, 60(3): 193-204.
A New Disturbance Rejection Control Scheme for a Class of Controlled Dynamic Chaotic Systems
Wang Qi,Wang Yinhe
(School of Automation, Guangdong University of Technology, Guangzhou 510006,China)
By employing the compensation system (sensitive system), the control scheme for disturbance amplitude rejection is proposed in this paper for a class of controlled dynamic chaotic systems in the case of disturbance amplitude increase. The control design first interconnects the controlled dynamic chaotic system with the sensitive system to form the interconnection system, then the adaptive state feedback controller is synthesized for the sensitive system to asymptotically guarantee the original stability of the controlled dynamic chaotic systems with disturbance amplitude increase. Finally, the demonstration of effectiveness is given in this paper by simulation example.
chaotic systems; asymptotical stability; disturbance amplitude rejection
2016-07-30;
2016-09-06。
王 頎(1993-),男,山西長治人,碩士,主要從事非線性系統(tǒng)控制方面的研究。
王銀河(1962-),男,內蒙古包頭人,教授,博士生導師,主要從事非線性控制系統(tǒng)魯棒自適應控制設計、復雜網(wǎng)絡等方向的研究。
1671-4598(2017)01-0076-06
10.16526/j.cnki.11-4762/tp.2017.01.022
TK323
A
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
