基于FPGA的PID神經元網絡控器的研究及應用
2017-02-17 00:53:53中船重工第七一五研究所任敬偉
電子世界 2017年2期
關鍵詞:設計
中船重工第七一五研究所 任敬偉
基于FPGA的PID神經元網絡控器的研究及應用
中船重工第七一五研究所 任敬偉
聲納收放系統工作環境極其惡劣并復雜多變,但工作中對纜陣的收放精度要求非常嚴格。為提高收放系統工作的穩定性、控高精度以及應對復雜環境的能力,改變傳統控制策略引進人工智能是十分必要的。本文在控制器的設計過程中引入PID神經元網絡智能控制算法,并對算法MATLAB軟件仿真和控制器實驗測試,通過實驗結果分析證明智能算法的引入對提高控制系統在復雜環境下穩定完成收放控制的能力效果明顯。
PID神經元網絡;FPGA;智能控制器;收方控制系統
1 引言
現階段收放系統工作過程中,各個環節均需要人為干預,系統工作性能和工作穩定性在很大程度上取決于操作人員的技術水平以及對系統結構熟悉程度,過多的人為因素將會影響系統在復雜環境中優越性能的充分體現。同時隨著科技的發展,尤其是人工智能技術的越趨成熟,有效地引入人工智能進入到復雜的控制系統中,對系統控制性能以及系統通用性的提高都有很大幫助。
根據以上分析以及對工作環境的研究,本文在進行控制器的設計研究過程中有效的將PID神經元網絡控制算法引入到以FPGA作為主控芯片的控制器中。
2 PID神經元網絡的基本原理
2.1 PID神經元網絡
PID神經元網絡是將傳統PID與神經網絡深入融合的一種新型半智能算法。采用的融合方式有效的解決了傳統PID控制過程中適應環境能力差的問題,以及神經網絡收斂速度慢、容易陷入局部最小等問題。PID神經元網絡將神經網絡中神經元的狀態函數采用比例、積分、微分函數使其具有比例、積分、微分功能,PID神經元網絡實現了傳統PID與神經網絡優缺點互補,優點主要體現以下方面:
1) PID神經元網絡仍然含有一般神經網絡的特點,因此其仍然具備一般神經網絡所具備的逼近任意連續有界的非線性函數的能力;
2) 初始權重值依據PID規律確定,系統在初始狀態下就趨近于穩定狀態,從而對整體系統的穩定性提供了保障,還加快了收斂速度從而有效的避免了陷入局部極小點;
3) 由于內部神經元具有了比例、積分和微分的特性,使PIDNN控制系統具有了響應速度快、超調小、無靜差等優點;
4) PID神經元網絡結構簡單、神經元數量少,因此其較容易的在硬件中實現,加快了其應用于實踐。
2.2 PID神經元網絡初始權值確定
PID神經元網絡結構分為單輸出和多輸出型二種,單輸出的PID神經元網絡是指在網絡中只有一個輸出神經元,對單一目標進行控制。
充分利用傳統PID控制中實時性以及其具有的豐富使用經驗和神經網絡具有對非線性系統的控制能力,二者互相補充實現真正意義上的PID神經網絡。SPIDNN網絡與被控對象串聯,設定輸入值與被控對象的輸出值最為SPIDNN的輸入值,控制器的輸出值作為被控對象的輸入值,PIDNN單變量控制系統的結構,如圖1所示。
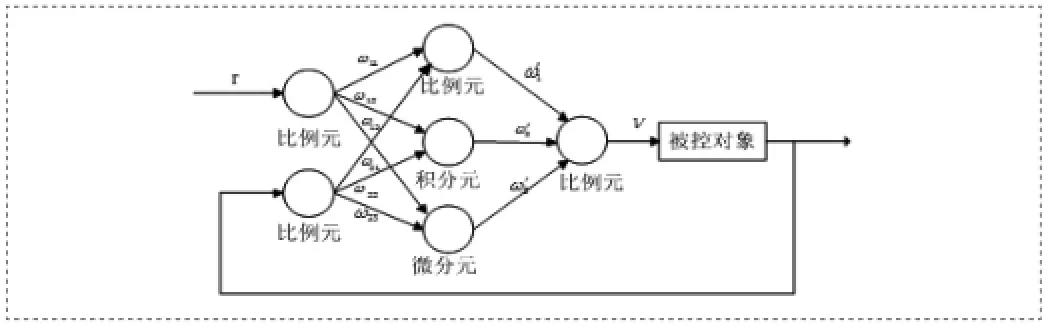
圖1 PIDNN單變量控制系統結構
3 PID神經元網絡控制器的硬件及軟件設計
3.1 控制器的硬件設計
硬件的設計在很大程度上決定著控制器性能,在硬件設計中核心算法芯片的選擇更是直接決定著控制器的運算速度和環境適應能力。控制器硬件設計前已經確定控制器將采用的控制算法為PID神經元網絡智能算法,為適應這種并行運行的算法選擇了基于硬件描述語言的FPGA控制器的核心芯片。
在硬件設計過程中充分考慮到應用環境的惡劣,對于輸入輸出均進行光電隔離。在接口設計中,有針對性地選擇100M以太網接口、CAN總線通信協議和485接口,硬件設計電路圖如圖2所示。

圖2 485通信接口
3.2 控制器的軟件設計
PID神經元網絡算法是一種半基于被控對象的智能算法,在控制器初始參數計算時不需要精確的數學模型,但也不同于其它智能算法初始參數隨即給定。PID神經元網絡控制器先通過傳統PID計算參數方法確定具有一定參考價值的初始參數,然后通過神經網絡的自學習能力,對網絡中權值進行優化。
4 控制算法仿真
4.1 固定被控對象的階躍響應
在MATLAB環境下采用S函數的形式編寫PID神經元網絡控制器,構建Simulink仿真框圖。在仿真框圖中,被控對象選用一個能基本代表收放控制系統的簡化二階模型,如圖5-4所示。在進行傳統PID控制器與SPIDNN控制器仿真時,其二者的參數相同,均為,仿真結果如圖3所示。
4.2 被控對象變參數仿真
為檢驗控制器在復雜環境下應對被控對象受外界環境影響其參數受到影響后,PID神經元網絡控制器的控制效果,將被控對象分母調整為后進行階躍響應,仿真結果如圖4所示。
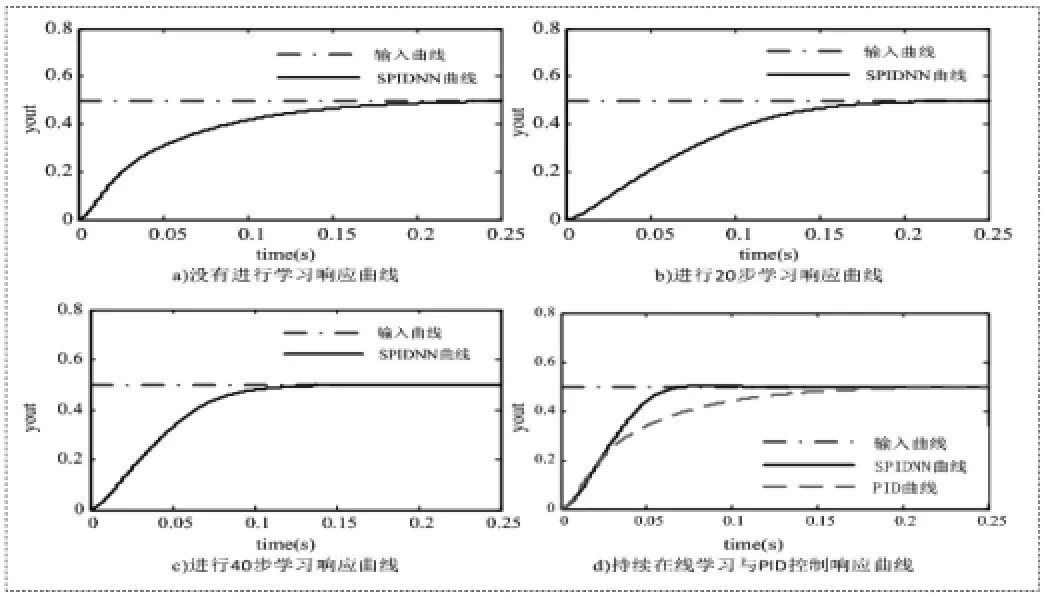
圖3 固定對象仿真圖
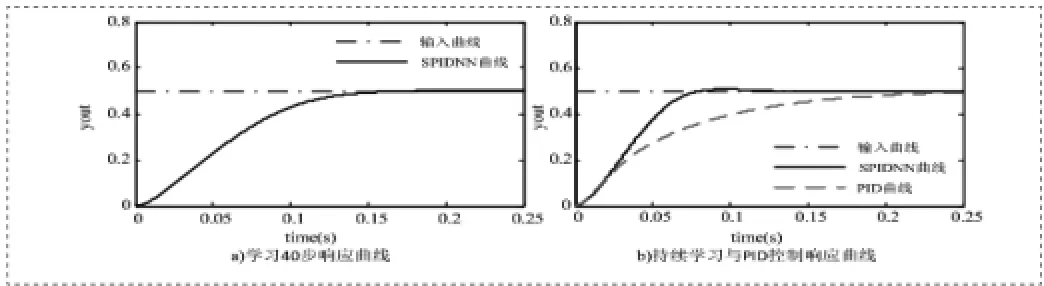
圖4 變參數仿真圖
5 結論
PID神經元網絡控制器采用的控制算法在模擬仿真中與傳統PID控制算法對比,可以看出無論在響應速度還是超調上都具有明顯優勢,應對復雜多變的控制環境更體現出智能控制不依賴于被控對象的優勢。綜合以上各方面分析,PID神經元網絡控制器在算法實現上對提高控制器性能具有很大的優勢,同時其簡單的結構對其在硬件實現具有極大的可行性。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04