基于拖曳浮標(biāo)的潛艇自主導(dǎo)航定位系統(tǒng)設(shè)計(jì)
2017-02-09 09:14:47向春清陳永強(qiáng)
艦船電子工程 2017年1期
關(guān)鍵詞:信號(hào)
向春清 陳永強(qiáng)
(91919部隊(duì) 黃岡 438000)
基于拖曳浮標(biāo)的潛艇自主導(dǎo)航定位系統(tǒng)設(shè)計(jì)
向春清 陳永強(qiáng)
(91919部隊(duì) 黃岡 438000)
潛艇的導(dǎo)航定位精度與其戰(zhàn)術(shù)技術(shù)性能密切相關(guān),在深水下實(shí)現(xiàn)精確的導(dǎo)航定位能夠有效提高潛艇的隱蔽作戰(zhàn)能力與武器投放命中精度。論文采用高頻調(diào)制解調(diào)技術(shù),提出了一種導(dǎo)航定位系統(tǒng)的設(shè)計(jì)方法,利用拖曳浮標(biāo),使?jié)撏г谒聭彝顟B(tài)或運(yùn)動(dòng)中實(shí)現(xiàn)自主導(dǎo)航定位,提高了潛艇的隱蔽戰(zhàn)斗能力。
拖曳浮標(biāo); 慣性導(dǎo)航; 自主導(dǎo)航
Class Number U675.7
1 引言
由于衛(wèi)星導(dǎo)航信號(hào)穿透海水的能力極差, 潛艇在水下航行時(shí)不能使用衛(wèi)星導(dǎo)航,要使用衛(wèi)星導(dǎo)航定位需要浮起來,使?jié)撏П粩撤絺蓽y到的概率大大增加,不利于潛艇的航行安全。目前潛艇在水下航行時(shí)的主要自主導(dǎo)航裝備是慣性導(dǎo)航系統(tǒng)(INS)[1,2],但是這一系統(tǒng)存在初始對(duì)準(zhǔn)精度及時(shí)間上的積累誤差,在水下工作的時(shí)間越長,導(dǎo)航誤差越大[3]。所以尋求其它方式實(shí)現(xiàn)潛艇在水下精確自主導(dǎo)航定位一直是國內(nèi)外研究的重點(diǎn)[4~6]。
本文設(shè)計(jì)的潛艇導(dǎo)航定位系統(tǒng)利用拖曳浮標(biāo)[7~9],并根據(jù)潛艇姿態(tài)進(jìn)行導(dǎo)航數(shù)據(jù)修正,可以使?jié)撏г谒聦?shí)現(xiàn)GPS/GLONASS/北斗導(dǎo)航系統(tǒng)[10~11]的組合自主定位,與慣性導(dǎo)航系統(tǒng)互為補(bǔ)充,具有較強(qiáng)的實(shí)用性。
2 設(shè)計(jì)思想
本文設(shè)計(jì)的定位系統(tǒng)工作方式如圖1所示:潛艇需要在水下進(jìn)行隱蔽定位時(shí),可在懸停或航行狀態(tài)下通過艇內(nèi)控制傳動(dòng)裝置釋放拖曳浮標(biāo)升至海面,同時(shí)通過拖曳傳輸電纜向浮標(biāo)供直流電,浮標(biāo)內(nèi)置的GPS/GLONASS/北斗接收機(jī)在海面能夠迅速開始工作并輸出導(dǎo)航數(shù)字信號(hào),經(jīng)數(shù)據(jù)組包后由浮標(biāo)內(nèi)的數(shù)據(jù)發(fā)送模塊將此信號(hào)調(diào)制、放大后通過拖曳傳輸電纜下傳,艇內(nèi)的接收機(jī)將信號(hào)進(jìn)行濾波、解調(diào)、修正等處理后恢復(fù)導(dǎo)航信息,定位結(jié)束后收回拖曳浮標(biāo)[12]。
系統(tǒng)的隱蔽性設(shè)計(jì)主要利用一個(gè)小型拖曳浮標(biāo)實(shí)現(xiàn)。浮標(biāo)整體水密,殼體采用特殊材料制作,外層涂覆海水近似顏色,體積很小且工作時(shí)不發(fā)射信號(hào),工作時(shí)拖曳傳輸電纜位于水下,可實(shí)現(xiàn)潛艇在水下的隱蔽導(dǎo)航定位。
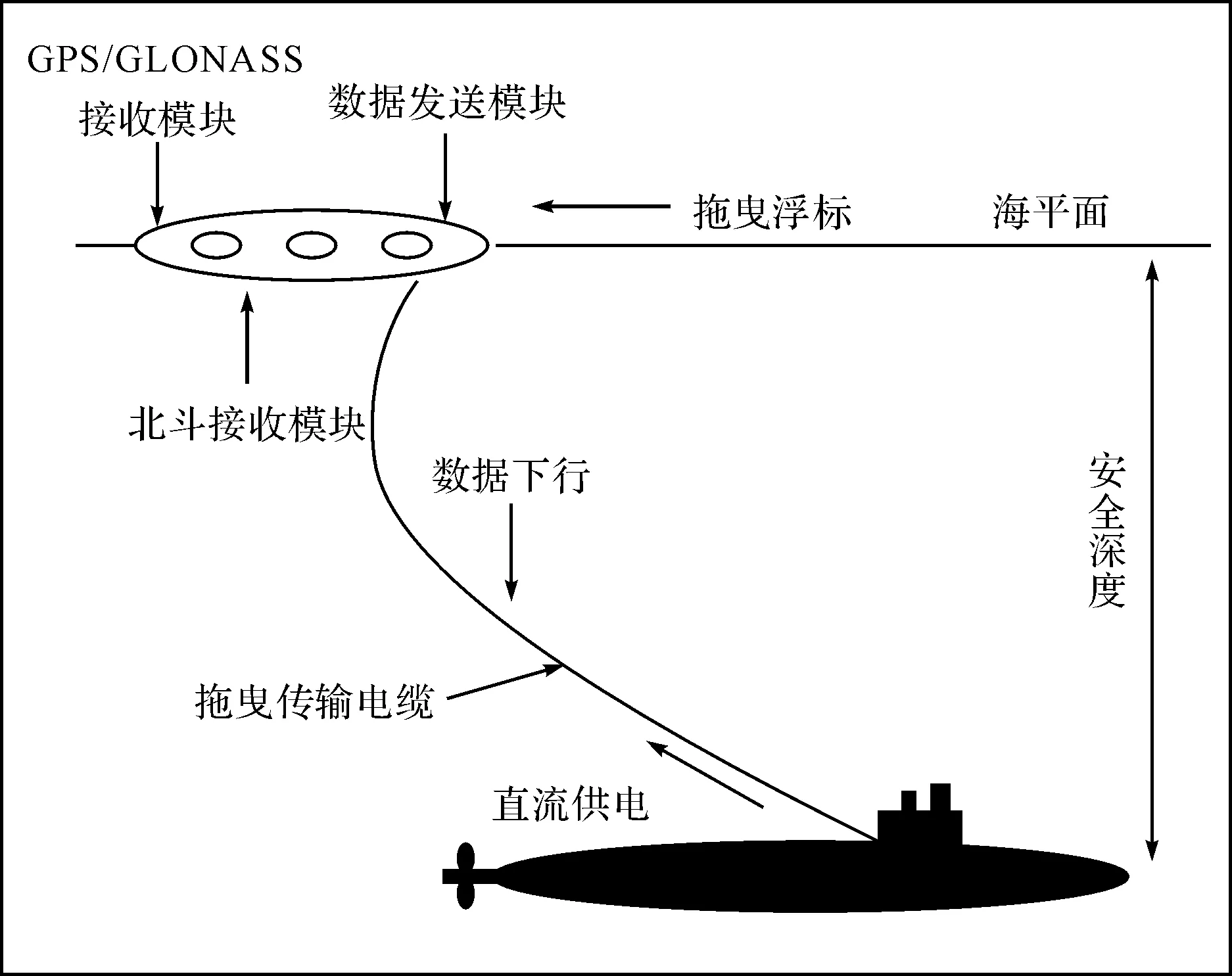
圖1 利用拖曳浮標(biāo)實(shí)現(xiàn)水下導(dǎo)航定位的工作原理
3 設(shè)計(jì)方案
3.1 硬件組成
基于拖曳浮標(biāo)的水下導(dǎo)航定位系統(tǒng)主要由拖曳浮標(biāo)、拖曳傳輸電纜及收放裝置、艇內(nèi)接收機(jī)組成,組成框圖如圖2所示。
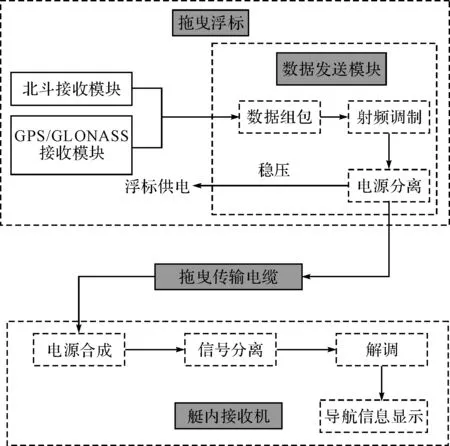
圖2 水下導(dǎo)航定位系統(tǒng)組成框圖
各主要模塊的功能及具體設(shè)計(jì)如下:
1) 拖曳浮標(biāo):內(nèi)置GPS/GLONASS接收模塊、北斗接收模塊及數(shù)據(jù)發(fā)送模塊,與拖曳傳輸電纜通過萬向接頭連接。
(1)GPS/GLONASS接收模塊:設(shè)計(jì)中選擇衛(wèi)導(dǎo)(GPS/GLONASS)雙系統(tǒng),利用兩個(gè)衛(wèi)星導(dǎo)航系統(tǒng)同時(shí)進(jìn)行衛(wèi)星定位測量。在模塊的選型上,可以選擇具備體積小、功耗低、精度高、定位迅速等特點(diǎn)的現(xiàn)有成型OEM板。拖曳浮標(biāo)釋放至水面后,能夠迅速定位,輸出位置、航向及航速等RS232串行數(shù)據(jù)信息。
(2)北斗接收模塊:北斗系統(tǒng)是我國自行開發(fā)研制,具有自主知識(shí)產(chǎn)權(quán)、自主控制的區(qū)域性衛(wèi)星導(dǎo)航定位系統(tǒng),具有戰(zhàn)略意義,是我國在戰(zhàn)時(shí)唯一可依賴的導(dǎo)航裝備。因此在模塊選型時(shí)采用我國自主產(chǎn)權(quán)的北斗接收模塊,在潛艇水下定位時(shí),可與GPS/GLONASS定位互為補(bǔ)充。北斗接收模塊同樣具有RS232數(shù)據(jù)輸出,可以通過單片機(jī)與GPS/GLONASS接收模塊輸出的數(shù)據(jù)按照一定的格式進(jìn)行組包。
(3)數(shù)據(jù)發(fā)送模塊:組成框圖如圖3所示。內(nèi)置單片機(jī),首先將GPS/GLONASS與北斗接收模塊輸出的導(dǎo)航數(shù)據(jù)按照一定格式進(jìn)行組包,射頻調(diào)制/倍頻/功放部分將組包后的數(shù)據(jù)調(diào)制,通過拖曳傳輸電纜下傳給艇內(nèi)接收機(jī)。由于浮標(biāo)所用直流電源與導(dǎo)航信號(hào)是復(fù)用的,必須進(jìn)行電源分離電路設(shè)計(jì)。分離電路由電感、電容組成,電容用于隔直,電感用于從拖曳傳輸電纜中取出直流信號(hào),供浮標(biāo)內(nèi)電路使用。
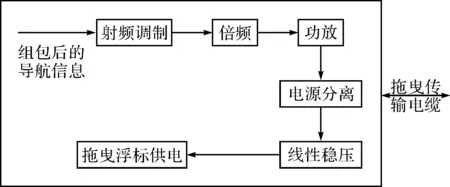
圖3 數(shù)據(jù)發(fā)送模塊組成框圖
2) 拖曳傳輸電纜:使用同軸傳輸電纜,由艇內(nèi)拖曳傳輸電纜控制器控制收放。不收信時(shí)卷繞于潛艇背部的鼓輪上,收信時(shí)可在一定的航速下全部釋放。完成上行電源信號(hào)及下行導(dǎo)航信號(hào)的傳輸。
3) 艇內(nèi)接收機(jī):主要功能是向拖曳浮標(biāo)供直流電,將接收到的導(dǎo)航信號(hào)解調(diào)、還原并顯示。
如圖4,信號(hào)分離電路分離出來的射頻信號(hào)經(jīng)濾波、放大后與本振信號(hào)進(jìn)行混頻產(chǎn)生中頻信號(hào),中頻信號(hào)經(jīng)鑒頻和整型后以TTL電平形式輸出,通過接口轉(zhuǎn)換電路轉(zhuǎn)換為RS-232信號(hào)送給單片機(jī)處理。單片機(jī)將導(dǎo)航數(shù)據(jù)恢復(fù)并修正后通過顯示屏顯示出來。
3.2 軟件設(shè)計(jì)
系統(tǒng)軟件設(shè)計(jì)組成包括:串行口通信模塊、導(dǎo)航信息處理模塊、誤差修正模塊及顯示模塊,如圖5所示。
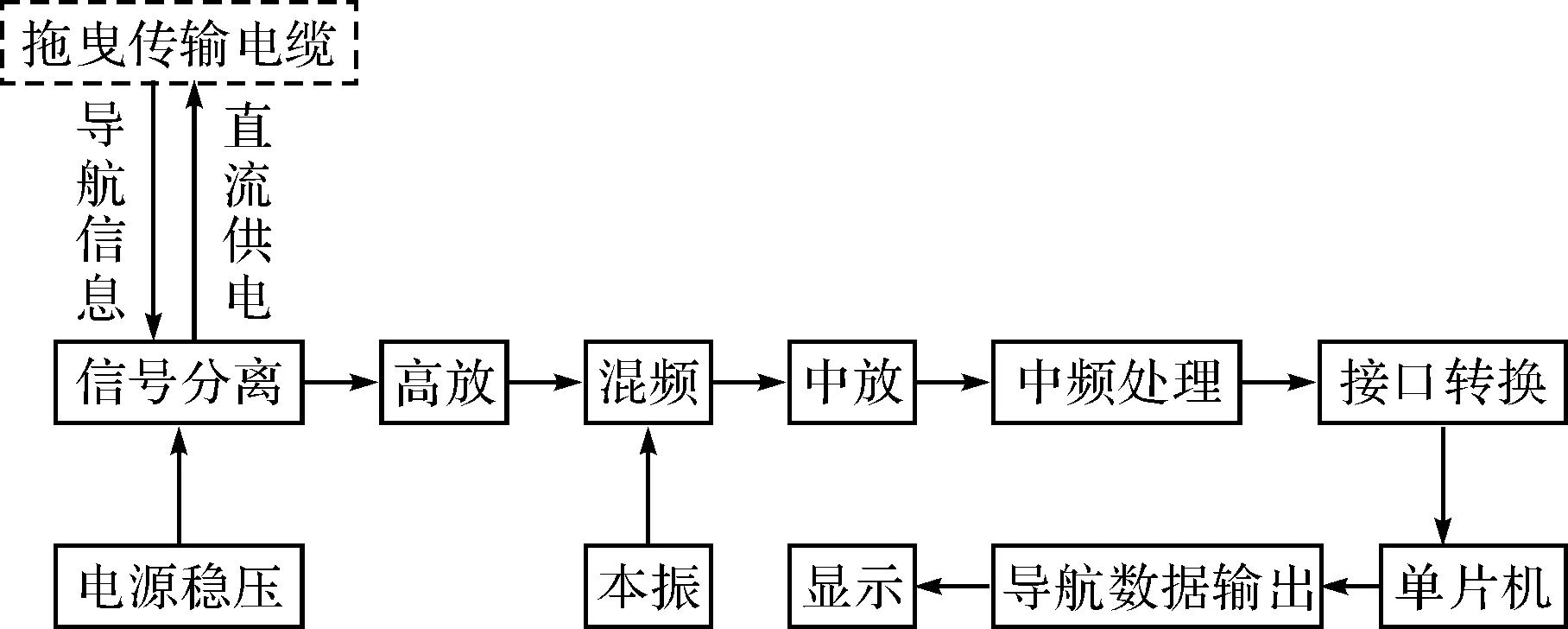
圖4 艇內(nèi)接收機(jī)組成框圖
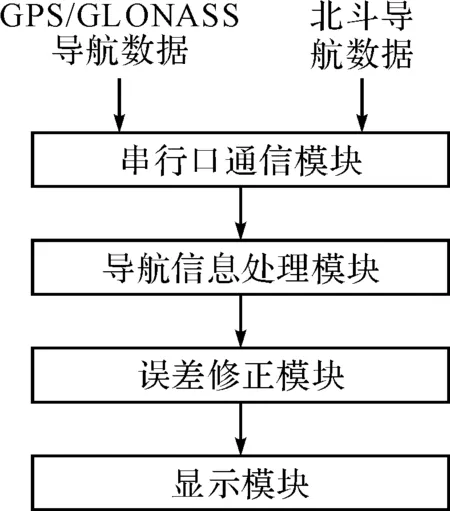
圖5 水下定位系統(tǒng)軟件組成框圖
各軟件模塊具體功能如下:
1) 串行口通信模塊:用于接收來自GPS/GLONASS接收機(jī)及北斗接收機(jī)的導(dǎo)航數(shù)字信號(hào),將這兩路信號(hào)按照一定的格式組包合并為一路, 采用串行透明傳輸,不進(jìn)行格式轉(zhuǎn)換。合并后的數(shù)據(jù)傳至數(shù)據(jù)發(fā)送模塊進(jìn)行處理。
2) 導(dǎo)航信息處理模塊:將艇內(nèi)接收機(jī)解調(diào)后的導(dǎo)航數(shù)據(jù)按組包的逆過程還原,重新分為北斗接收機(jī)數(shù)據(jù)及GPS/GLONASS數(shù)據(jù)。
3) 誤差修正模塊: 由于接收到定位信息實(shí)際上是拖曳浮標(biāo)的位置信息, 必須進(jìn)行誤差修正才能獲得更精確的潛艇定位信息。誤差修正模塊根據(jù)獲得的潛艇航向、航速、深度等信息進(jìn)行計(jì)算并修正后,能夠進(jìn)一步提高潛艇的水下定位精度。
4) 顯示模塊:將最終的導(dǎo)航定位信息在接收機(jī)屏幕上顯示出來。
4 結(jié)語
本文提出了一種新型的水下自主導(dǎo)航定位系統(tǒng)的設(shè)計(jì)思路,并分析了系統(tǒng)組成及軟件架構(gòu),能夠與慣導(dǎo)系統(tǒng)互為補(bǔ)充。
[1] 李榮冰,劉建業(yè),曾慶化.基于MEMS技術(shù)的微型慣性導(dǎo)航系統(tǒng)的發(fā)展現(xiàn)狀[J].中國慣性技術(shù)學(xué)報(bào),2004,12(6):88-94.
[2] 秦永元.慣性導(dǎo)航[M].北京:科學(xué)出版社,2014.
[3] 高鐘毓.慣性導(dǎo)航系統(tǒng)技術(shù)[M].北京:清華大學(xué)出版社,2012.
[4] 李鶴峰,黨亞民,秘金鐘.BDS與GPS、GLONASS多模融合導(dǎo)航定位時(shí)空統(tǒng)一[J].大地測量與地球動(dòng)力學(xué),2013,33(4):73-78.
[5] 胡小平.自主導(dǎo)航理論與應(yīng)用[M].長沙:國防科技大學(xué)出版社,2002.
[6] 陳艷,張漫,馬文強(qiáng).基于GPS和機(jī)器視覺的組合導(dǎo)航定位方法[J].農(nóng)業(yè)工程學(xué)報(bào),2011,27(3):126-131.
[7] 李麗華,王永斌.潛艇拖曳綜合浮標(biāo)及其關(guān)鍵技術(shù)[J].艦船電子工程,2005,25(5):23-25.
[8] 杜曉旭,宋保維,胡海豹.AUV拖曳GPS浮標(biāo)系統(tǒng)仿真研究[J].西北工業(yè)大學(xué)學(xué)報(bào),2008,26(1):88-92.
[9] 王光源,馬海洋,李冬.拖曳通信浮標(biāo)對(duì)潛艇隱蔽性的影響[J].艦船科學(xué)技術(shù),2012,34(3):107-110.
[10] 呂偉,朱建軍.北斗衛(wèi)星導(dǎo)航系統(tǒng)發(fā)展綜述[J].地礦測繪,2007,23(3):29-32.
[11] 楊元喜.北斗衛(wèi)星導(dǎo)航系統(tǒng)的進(jìn)展、貢獻(xiàn)與挑戰(zhàn)[J].測繪學(xué)報(bào),2010,39(1):1-6.
[12] 羅曼,陳敏慎,曾東.潛艇拖曳通信浮標(biāo)體應(yīng)用與發(fā)展初探[J].艦船科學(xué)技術(shù),2008,30(S1):77-80.
Design of Autonomous Navigation and Positioning System for Submarine Based on Towed Buoy
XIANG Chunqing CHEN Yongqiang
(No. 91919 Troops of PLA, Huanggang 438000)
Submarine navigation and positioning accuracy is closely related to its tactical and technical performance, it can effectively improve the ability of the submarine’s concealed operation and the hit precision of weapon delivery by realizing accurate navigation and positioning in deep water. By using the high frequency modulation and demodulation technology, this paper presents a design method of autonomous navigation and positioning system by using the submarine towed buoy which to realize the autonomous navigation in the state of underwater hovering and movement. The autonomous navigation and positioning system can effectively improve the combat capability of submarine concealment.
towed buoy, inertial navigation, autonomous navigation
2016年7月3日,
2016年8月20日
向春清,男,碩士,高級(jí)工程師,研究方向:通信工程研究和應(yīng)用。 陳永強(qiáng),男,博士,工程師,研究方向:網(wǎng)絡(luò)與信息安全、系統(tǒng)性能評(píng)價(jià)等。
U675.7
10.3969/j.issn.1672-9730.2017.01.012
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
