三軸磁傳感器誤差分析與校準(zhǔn)
2017-02-10 00:35:43卞鴻巍王榮穎蘇瑞祥
艦船電子工程 2017年1期
關(guān)鍵詞:模型
陳 雷 卞鴻巍 王榮穎 蘇瑞祥
(1.海軍工程大學(xué)導(dǎo)航工程系 武漢 430033)(2.海軍青島航保修理廠(chǎng) 青島 266000)
三軸磁傳感器誤差分析與校準(zhǔn)
陳 雷1卞鴻巍1王榮穎1蘇瑞祥2
(1.海軍工程大學(xué)導(dǎo)航工程系 武漢 430033)(2.海軍青島航保修理廠(chǎng) 青島 266000)
針對(duì)傳統(tǒng)使用磁性物質(zhì)對(duì)磁傳感器誤差補(bǔ)償繁瑣、精度不高;多位置標(biāo)定法對(duì)設(shè)備要求高等難題。論文在分析磁傳感器各項(xiàng)誤差的基礎(chǔ)上,建立誤差模型;根據(jù)磁傳感器誤差模型證明了磁傳感器數(shù)據(jù)分布在橢球面這一假設(shè),進(jìn)而在橢球約束的前提下利用最小二乘擬合方法,求取誤差參數(shù),對(duì)磁傳感器各項(xiàng)誤差予以補(bǔ)償,實(shí)驗(yàn)結(jié)果表明,該標(biāo)定方法能夠有效地補(bǔ)償磁傳感器硬磁干擾、軟磁干擾、零偏、非正交誤差、刻度因數(shù)等誤差項(xiàng)。
磁傳感器; 誤差模型; 橢球擬合; 標(biāo)定補(bǔ)償
Class Number TP212.13
1 引言
由于地球磁場(chǎng)強(qiáng)度比較穩(wěn)定,在加速度計(jì)提供載體俯仰角和橫滾角的前提下,通過(guò)磁傳感器輸出的三軸的磁場(chǎng)強(qiáng)度,可以解算出航向角。磁傳感器的測(cè)量值會(huì)受載體環(huán)境硬磁和軟磁干擾,同時(shí)存在零偏、非正交和刻度因數(shù)等誤差[1]。為了獲取更加精確的航向信息,需要對(duì)磁傳感器進(jìn)行誤差補(bǔ)償。傳統(tǒng)的補(bǔ)償方法為硬補(bǔ)償,即在傳感器周?chē)胖糜泊拧④洿诺葋?lái)抵消載體硬軟磁干擾,但是這種存在方法比較繁瑣、精度較低等問(wèn)題;也有學(xué)者使用多位置標(biāo)定方法,但是需要找到磁北,對(duì)設(shè)備要求較高[2~3]。本文針對(duì)磁傳感器硬磁干擾、軟磁干擾及磁傳感器器件誤差,建立磁傳感器誤差模型[4],通過(guò)橢球擬合的方法對(duì)磁傳感器進(jìn)行標(biāo)定補(bǔ)償,能夠有效地補(bǔ)償磁傳感器各項(xiàng)誤差。
2 磁傳感器誤差建模
磁傳感器誤差主要為硬磁干擾、軟磁干擾和器件誤差即零偏、非正交誤差、和刻度因數(shù)。
2.1 硬磁干擾和軟磁干擾
當(dāng)硬磁材料被磁化后會(huì)產(chǎn)生一個(gè)固定的磁場(chǎng),即使周?chē)拇艌?chǎng)的強(qiáng)弱和方向發(fā)生變化后,這個(gè)固定磁場(chǎng)依舊不會(huì)發(fā)生變化。由于硬磁干擾對(duì)磁傳感器輸出的三軸矢量是恒定的[5],則磁傳感器受硬磁干擾的輸出可表示為
H1=He+Hh
(1)
其中H1為磁傳感器在受到硬磁干擾后的測(cè)量值,He為磁傳感器敏感到的三軸地磁場(chǎng)矢量,Hh為硬磁對(duì)磁傳感器測(cè)量值的影響。
載體上軟磁材料可以看成由載體X,Y,Z三個(gè)方向軟磁材料組成,各軸向的軟磁材料分別受到三軸地磁場(chǎng)分量的磁化,對(duì)磁傳感器產(chǎn)生三個(gè)方向的軟磁干擾。軟磁干擾與軟磁材料的數(shù)量、質(zhì)量和磁傳感器與載體的相對(duì)位置有關(guān)[6]。表1為磁傳感器各軸向受到的軟磁干擾的誤差模型。

表1 軟磁干擾誤差模型

載體軟磁材料受到地磁場(chǎng)磁化后產(chǎn)生的磁干擾為Hs,則磁傳感器受軟磁干擾的輸出模型可表示為
(2)
故磁傳感器受到硬磁和軟磁干擾的誤差模型可表示為
(3)其中
Hm為磁傳感器受硬磁和軟磁干擾后的輸出。
2.2 磁傳感器器件誤差
磁傳感器非正交誤差是在傳感器制造過(guò)程中三個(gè)敏感軸偏離了理想互相垂直的軸向。令磁傳感器理想正交坐標(biāo)系為OXYZ,磁傳感器實(shí)際的三軸非正交坐標(biāo)系為OX1Y1Z1,假設(shè)OXZ平面與OX1Z1平面重合且OZ軸與OZ1軸重合,OX1軸在OXZ平面與OX軸的夾角為α,OY1軸在OXY平面上的投影與OY1軸的夾角為β,此投影與OY的夾角為γ,則磁傳感器的非正交誤差模型可表示為
(4)
(5)
式中Lx、Ly、Lz為磁傳感器X、Y、Z軸的刻度因數(shù)。
同時(shí)磁傳感器還存在三軸零偏He0,綜合以上所有討論到的磁傳感器的誤差,可將磁傳感器輸出表示為
H=K1K2Hm+He0
(6)
其中
結(jié)合磁傳感器硬磁和軟磁干擾誤差,即式(3),可得:
H=K1K2EHe+(K1K2Hh+He0)=PHe+Q
(7)
其中
(8)
3 基于橢球假設(shè)的磁傳感器標(biāo)定
若將磁傳感器在空間以任意姿態(tài)角旋轉(zhuǎn),磁傳感器輸出數(shù)據(jù)分布在一個(gè)中心在原點(diǎn),半徑為C的標(biāo)準(zhǔn)球面上[7~8]。但是實(shí)際應(yīng)用中由于磁傳感器受到各種誤差的影響,使得磁傳感器測(cè)量的數(shù)據(jù)點(diǎn)不再處于這個(gè)標(biāo)準(zhǔn)球面上。橢球假設(shè)是指當(dāng)磁傳感器處于磁環(huán)境比較穩(wěn)定的載體中受到硬磁、軟磁和零偏、刻度因數(shù)、非正交誤差等影響后,磁傳感器輸出數(shù)據(jù)分布在一個(gè)中心偏離坐標(biāo)系原點(diǎn)的橢球上。
根據(jù)式(7)可以得到磁傳感器誤差模型的二次型,如式(9)所示:
HTH=HePTPHe+HePTQ+QTPHe+QTQ
(9)
由式(9)可知,若PTP滿(mǎn)足嚴(yán)格對(duì)角占優(yōu)條件,則為正定矩陣,可以得出HTH為橢球面,由式(8)知P具體的表示形式:
(10)
矩陣K1中的元素Lx,Ly,Lz為傳感器的刻度因數(shù)都趨近于1,而且K1為對(duì)角矩陣,故矩陣K1是正定矩陣;由于非正交角度為比較小的角度,即α,β,γ為小角度,則cosα,cosβ,cosγ趨近于1,而sinα,sinβ,sinγ趨近于0,故矩陣K2為一嚴(yán)格對(duì)角占優(yōu)正定矩陣;根據(jù)文獻(xiàn)[9]可知,軟磁干擾矩陣中的元素hxx,hxy,hxz,hyx,hyy,hyz,hzx,hzy,hzz均為較小量,則矩陣E為嚴(yán)格對(duì)角占優(yōu)正定矩陣。綜上對(duì)矩陣P的分析可知其為嚴(yán)格對(duì)角占優(yōu)正定矩陣,則PTP為嚴(yán)格對(duì)角占優(yōu)正定矩陣,從而證明了橢球假設(shè)的正確性。
以實(shí)際所有采集到的數(shù)據(jù)點(diǎn)與橢球面的距離平方和最小為判定原則,利用最小二乘法對(duì)磁傳感器輸出數(shù)據(jù)進(jìn)行橢球擬合[10~11]。確定擬合后橢球面的參數(shù),根據(jù)橢球面參數(shù)求解誤差參數(shù),從而對(duì)磁傳感器進(jìn)行校準(zhǔn)。
磁傳感器測(cè)量的三軸磁場(chǎng)矢量Hx,Hy,Hz,經(jīng)過(guò)擬合后滿(mǎn)足橢球面方程:
ax2+by2+cz2+dxy+eyz+fxz+mx+ny+tz=1
(11)
其中a,b,c,d,e,f,m,n,t為橢球面參數(shù)。
將橢球面方程表示成矢量形式:
(X-X0)TA(X-X0)=1
(12)
可得:
HTAH-2H0TAH+H0TH0=1
(13)
根據(jù)磁傳感器的誤差模型,可得其誤差補(bǔ)償模型為
He=P-1(H-Q)
(14)
對(duì)He取模可得:

(15)
對(duì)式(15)作等效變換可得:
(16)
對(duì)比式(12)和式(16)可得誤差參數(shù);
(17)
在求得誤差參數(shù)的基礎(chǔ)上結(jié)合誤差補(bǔ)償模型,即式(14)可對(duì)磁傳感器的輸出進(jìn)行補(bǔ)償。
4 實(shí)驗(yàn)驗(yàn)證
將一小鐵塊和磁傳感器固定在木板上,這樣是為了使磁傳感器受到硬磁干擾和軟磁干擾。采集磁傳感器在空間任意姿態(tài)下的數(shù)據(jù),根據(jù)橢球擬合標(biāo)定方法解出誤差參數(shù)P和Q,根據(jù)誤差補(bǔ)償模型對(duì)磁傳感器輸出的數(shù)據(jù)進(jìn)行補(bǔ)償。
將實(shí)驗(yàn)測(cè)得的磁傳感器的數(shù)據(jù)和誤差標(biāo)定補(bǔ)償后的數(shù)據(jù)進(jìn)行對(duì)比,如圖1所示,可以看出原始數(shù)據(jù)處于一個(gè)中心點(diǎn)偏離坐標(biāo)原點(diǎn)的橢球面上,而經(jīng)過(guò)誤差補(bǔ)償后的數(shù)據(jù)分布在中心基本位于坐標(biāo)原點(diǎn)的球面上。
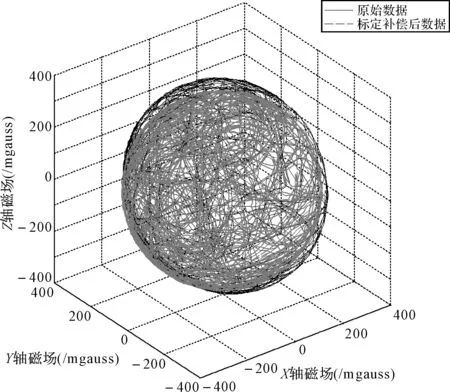
圖1 標(biāo)定補(bǔ)償前后數(shù)據(jù)
為了更加清晰地反映誤差標(biāo)定補(bǔ)償前后磁傳感器數(shù)據(jù)所在曲面的中心,將標(biāo)定補(bǔ)償前后數(shù)據(jù)所在曲面分別投影在OXY、OXZ、OYZ平面,如圖2~圖4所示,可知標(biāo)定補(bǔ)償后的數(shù)據(jù)在三個(gè)平面上的中心點(diǎn)基本在坐標(biāo)原點(diǎn),而標(biāo)定補(bǔ)償前數(shù)據(jù)在平面上的中心點(diǎn)明顯偏離坐標(biāo)原點(diǎn),從而可知磁傳感器數(shù)據(jù)標(biāo)定補(bǔ)償后分布在中心基本在坐標(biāo)原點(diǎn)的曲面上,而未經(jīng)標(biāo)定補(bǔ)償?shù)拇艂鞲衅鞯臄?shù)據(jù)處于中心偏離坐標(biāo)原點(diǎn)的曲面上。

圖2 標(biāo)定補(bǔ)償前后數(shù)據(jù)
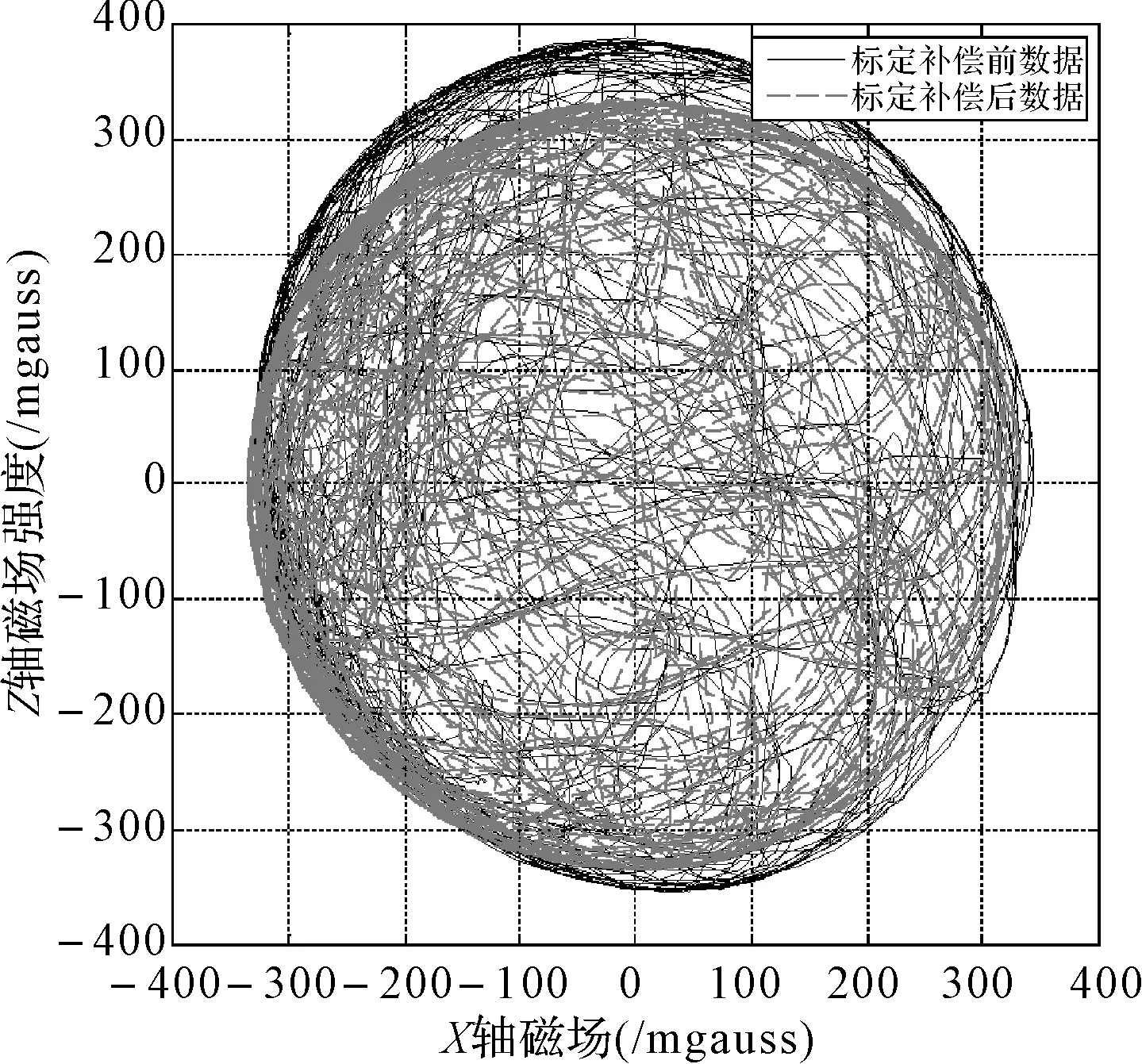
圖3 標(biāo)定補(bǔ)償前后數(shù)據(jù)
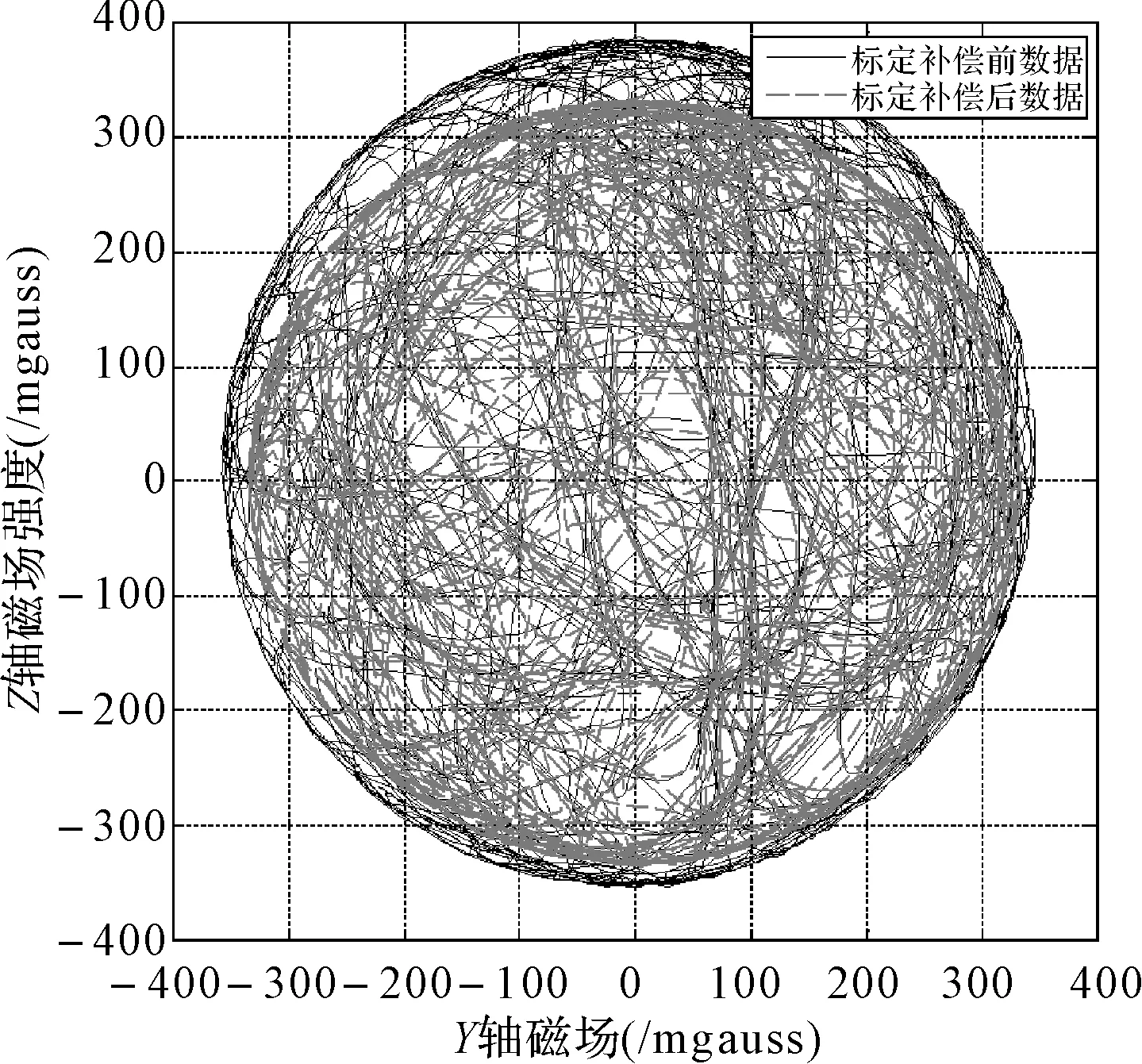
圖4 標(biāo)定補(bǔ)償前后數(shù)據(jù)
圖5為誤差標(biāo)定補(bǔ)償前后磁傳感器數(shù)據(jù)模值對(duì)比,可以看出標(biāo)定補(bǔ)償后磁傳感器數(shù)據(jù)的模值波動(dòng)小于磁傳感器輸出的原始數(shù)據(jù)模值的波動(dòng)。磁傳感器輸出原始數(shù)據(jù)的模值方差為304.9089(mgauss2),磁傳感器數(shù)據(jù)誤差標(biāo)定補(bǔ)償后模值方差為1.7698(mgauss2)。可以得出磁傳感器數(shù)據(jù)經(jīng)標(biāo)定補(bǔ)償后基本處于球面上。
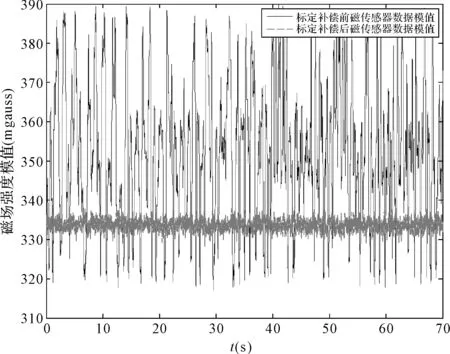
圖5 標(biāo)定補(bǔ)償前后磁傳感器數(shù)據(jù)模值
由以上對(duì)磁傳感器誤差標(biāo)定補(bǔ)償前后數(shù)據(jù)所處的曲面及曲面的中心分析,可得標(biāo)定補(bǔ)償后的磁傳感器數(shù)據(jù)基本分布在球心在原點(diǎn)的球面上。
5 結(jié)語(yǔ)
本文分析磁傳感器各項(xiàng)誤差來(lái)源,建立誤差模型,證明了磁傳感器輸出數(shù)據(jù)分布符合橢球這一假設(shè),而后根據(jù)擬合后橢球面參數(shù)求取磁傳感器誤差參數(shù),對(duì)磁傳感器進(jìn)行誤差補(bǔ)償。橢球擬合標(biāo)定實(shí)驗(yàn)表明,該方法能夠較好地校正由磁傳感器零偏和硬磁干擾而引起的數(shù)據(jù)所在曲面的中心偏離坐標(biāo)零點(diǎn),以及由刻度因數(shù)、非正交、軟磁干擾引起的球面發(fā)生畸變成橢球面。驗(yàn)證了該標(biāo)定算法的有效性。
[1] 龍禮,張合.三軸地磁傳感器誤差的自適應(yīng)校正方法[J].儀器儀表學(xué)報(bào),2013,34(1):161-165.
[2] 林恒,魏瑩瑩,李保國(guó).一種八位置數(shù)字磁強(qiáng)計(jì)系統(tǒng)誤差標(biāo)定方法[J].傳感器與微系統(tǒng),2011,30(3):87-89.
[3] 郭鵬飛,任章,邱海韜,等.一種十二位置不對(duì)北的磁羅盤(pán)標(biāo)定方法[J].中國(guó)慣性技術(shù)學(xué)報(bào),2007,15(5):598-601.
[4] 戴磊,齊俊桐,吳沖,等.旋翼飛行機(jī)器人磁羅盤(pán)誤差分析及校準(zhǔn)[J].機(jī)器人,2012,34(4):418-423.
[5] 李翔.航姿參考系統(tǒng)三軸磁強(qiáng)計(jì)校正的點(diǎn)積不變法[J].儀器儀表學(xué)報(bào),2012,33(8):1813-1817.
[6] 趙琳,楊曉東.現(xiàn)代艦船導(dǎo)航系統(tǒng)[M].北京:國(guó)防工業(yè)出版社,2015.
[7] 練軍想,唐康華.GNSS與慣導(dǎo)及多傳感器組合導(dǎo)航系統(tǒng)原理[M].北京:國(guó)防工業(yè)出版社,2015.
[8] 陳國(guó)彬.彈載三軸磁測(cè)系統(tǒng)設(shè)計(jì)與誤差標(biāo)定補(bǔ)償技術(shù)研究[D].太原:中北大學(xué),2012.
[9] Moulin M, Goudon J C, Marsy J M, et al. Process for compensating the magnetic disturbances in the determination of a magnetic heading, and devices for carrying out this process: US, US 4414753 A[P].1983.
[10] Fitzgibbon, Pilu, Fisher. Direct least-squares fitting of ellipses[J]. IEEE Transactions on Patterns Analysis & Machine Intelligence,1996,1(5):253-257.
[11] Gander W, Strebel R, Golub G H. Least-squares fitting of circles and ellipses[J]. BIT,1994,34(4):558-578.
Three-axis Magnetic Sensor Error Analysis and Calibration
CHEN Lei1BIAN Hongwei1WANG Rongying1SU Ruixiang2
(1. Department of Navigation Engineering,Naval University of Engineering, Wuhan 430033) (2. Navy’s Navigation Warranty and Repair Plant of Qingdao, Qingdao 266000)
Aiming at the problems that the traditional methods use magnetic materials in magnetic sensor error compensation is trival, low precision, and multi position method of calibration requires higher precision equipment, in this paper, errors model is established on the basis of the analysis of the magnetic sensor errors, Based on this error model, a hypothesis that the magnetic sensor data distribution in a ellipsoid, using the least squares fitting method to calculate the ellipsoid parameters. On the premise of ellipsoid constraint, the error parameter is calculated and the error of magnetic sensors is compensated. The experiment result shows that the calibration method can effectively compensate the magnetic sensor errors which contain hard magnetic interference, soft magnetic interference, zero bias, nonorthogonal error, and scale factor.
magnetic sensor, error model, ellipsoid fitting, calibration and compensation
2016年7月19日,
2016年9月1日
國(guó)家自然科學(xué)基金資助項(xiàng)目(編號(hào):41506220)資助。
陳雷,男,碩士研究生,研究方向:導(dǎo)航制導(dǎo)與控制。卞鴻巍,男,教授,博士生導(dǎo)師,研究方向:導(dǎo)航制導(dǎo)與控制。王榮穎,男,博士,講師,研究方向:導(dǎo)航制導(dǎo)與控制。蘇瑞祥,男,碩士,工程師,研究方向:慣導(dǎo)與平臺(tái)羅經(jīng)修理。
TP212.13
10.3969/j.issn.1672-9730.2017.01.010
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
