基于TMR傳感器的車輛檢測分類算法研究
2017-02-06 05:46:47吳兆明
聲學技術 2017年6期
關鍵詞:檢測
吳兆明
(南京交通職業技術學院電子信息工程學院,江蘇南京 211188)
0 引 言
隨著城市化進程的不斷加快,智能交通系統(Intelligent Transportation System,ITS)的研究與建設也日趨深入,主要涉及到交通管理及車輛控制、車輛檢測與識別、交通信號燈智能控制、車位檢測與停車誘導系統等多方面[1]。其中車輛作為 ITS的構成主體之一,其自動識別與檢測技術更是當前人們研究的熱點和難點。
目前世界上的道路車輛檢測技術有以下幾種方式:基于地感線圈、超聲波、紅外線、視頻圖像、射頻識別(Radio Frequency Identification,RFID)以及地磁傳感。其中,地感線圈、視頻圖像和超聲波技術以其性能穩定、安裝方便等優勢,在我國交通系統中已廣泛應用。文獻[2]利用小波變換方法,結合遺傳算法及復數特征值計算方法,能自動識別交通振動試驗中行走的車輛參數;文獻[3]通過對采集的前后方車輛的視頻圖像信息進行處理,結合非線性支持向量機算法,實現小波去噪,成功識別車輛分類;文獻[4]采用各向異性磁阻(Anisotropic Magneto Resistance,AMR)傳感器,可根據不同車型的整車長度、車型尺寸等進行車輛分類。以上車輛檢測方法都取得了一定的效果,但仍然存在局限性。比如地感線圈檢測系統對安裝要求高、使用壽命短,不易維護;視頻圖像系統的精確度不高,且算法實時性差,道路高峰期的車流量、車型等參數都有一定的時延。另外,無線磁阻檢測器通信容易受到路面積水、積雪的影響,檢測靈敏度、功耗及穩定性方面也得不到進一步提升,這些問題限制了其大范圍推廣。
為此,本文結合隧穿磁阻傳感器(Tunneling Magneto Resistance,TMR),提出了一種基于特征波形向量提取的改進算法,用于道路車輛監測與類型識別。實驗結果顯示,該方法精確性高、功耗低,有較強的實用性。
1 TMR傳感器
1.1 TMR傳感器的原理
磁電阻效應是指強磁性材料在受到外加磁場作用時引起電阻變化的現象[5],按照電阻變化率的高低,可將磁傳感器劃分為霍爾傳感器、各向異性磁電阻 AMR傳感器、巨磁電阻(Giant Magneto Resistance,GMR)傳感器以及隧道磁電阻 TMR傳感器四類。其中,TMR傳感器電阻變化率最大,且溫度穩定性高、功耗低、線性度好,是目前工業應用中最為廣泛的一種。
TMR傳感器的產生機理是自旋相關的隧穿效應,一般結構為鐵磁層FM/非磁絕緣層I/鐵磁層FM(The Ferromagnetic Layer / Non-magnetic Insulation/The Ferromagnetic layer/FM)的三明治結構[6],分別對應釘扎層、隧道勢壘層以及自由層,其理想響應曲線如圖1所示。其中,橫坐標為外加磁場作用H,縱坐標為磁電阻R;RL為低阻態阻值,RH之為高阻態阻值,H0為曲線的對稱中心,是典型的偏移磁場,通常稱為“奈爾耦合”[6];HS、?HS是線性區域切線分別與高低阻態切線的交點;白色箭頭表示自由層磁矩的方向,黑色箭頭表示釘扎層磁矩的方向。
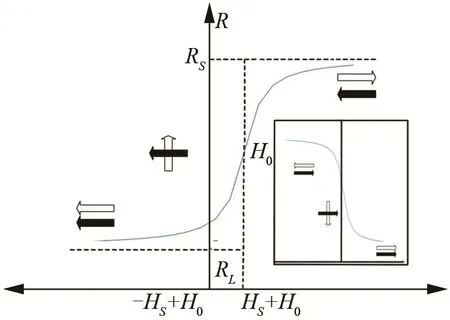
圖 1 TMR元件的理想響應曲線Fig.1 The ideal response curve of TMR element
由圖1可知:
(1)在區間[?HS+H0,HS+H0]內,元件處于理想狀態,磁電阻R隨外場H的變化是完美的線性關系,同時沒有磁滯(曲線滯后右移的現象)。斜率越大,證明元件靈敏度越高。
(2)理想狀態左側為低阻態,右側為高阻態。白色箭頭代表第一層F層磁矩,黑色箭頭代表第三層F層磁矩。具有自旋的電子通過量子隧穿效應穿過中間絕緣層時,磁電阻曲線隨磁矩之間的角度發生變化。當兩個箭頭反平行時,曲線對應高阻態,平行時則對應低阻態[7]。
(3)當兩層磁矩垂直時,對應理想狀態的工作點H,即位于RL及RH之間。
1.2 TMR傳感器的優點
TMR元件是近年來工業應用的新型磁電阻效應傳感器,性能較優。表1是AMR、GMR以及TMR元件的技術參數對比。
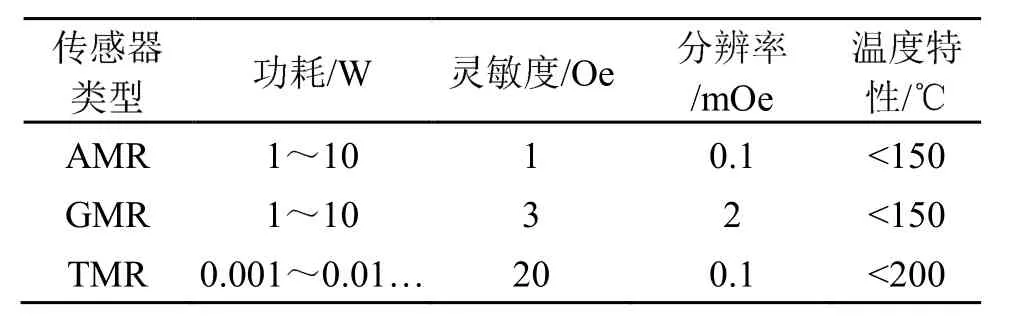
表1 磁傳感技術參數對比Table 1 Comparison of technical parameters between magnetic sensors
由表 1可知,TMR元件具有更好的溫度穩定性、更高的靈敏度、更寬的線性范圍和更低的功耗。
2 基于TMR的車輛檢測分類算法
2.1 基本原理
本文采用TMR傳感器,結合雙節點動態采樣及基于拐點斜率的加權歐氏距離分類法,提出了一種改進的車輛檢測分類算法,擬在第一時間內監測到車輛信息,并能快速識別出車輛類型。
在車輛檢測環節,采用TMR傳感器作為檢測元器件。由于TMR效應具有極佳的穩定性,磁滯現象幾乎可以忽略不計,只要不是人為加入強磁場干擾,一般安裝初始化后,TMR傳感器檢測節點就能以固定閾值來檢測車輛,且檢測效果較好。同時,為了降低元件的功耗,算法還引入了雙節點動態采樣及喚醒機制,有利于延長傳感器的使用壽命。
在車型識別方面,常見的算法較多,有固定閾值、自適應分類、狀態機檢測法等,但模式識別方式需要大量的運算,且不適合在低功耗場合應用。因此,本文采用基于拐點斜率的加權歐氏距離算法來實現車型識別。由于該算法計算量低,自主學習效率高,很容易集成到單片機中運行,是一種較為可靠的檢測算法。
2.2 T MR檢測節點設計
本文選用的TMR傳感器,其集成芯片內部采用推挽式惠斯通全橋結構,包含四個非屏蔽高靈敏度TMR元件。當檢測車輛經過TMR效應傳感器時,外加磁場將沿平行于傳感器敏感的方向變化,惠斯通全橋提供差分電壓輸出,具有良好的溫度穩定性。利用TMR效應傳感器設計的無線車輛檢測節點將能獲得更加豐富的車輛波形數據,提高車輛識別精度。
圖2為TMR傳感器檢測到的某大貨車檢測波形,圖3為TMR傳感器檢測到的某小轎車檢測波形。其中,橫軸為采樣點、縱軸為對應的強度。
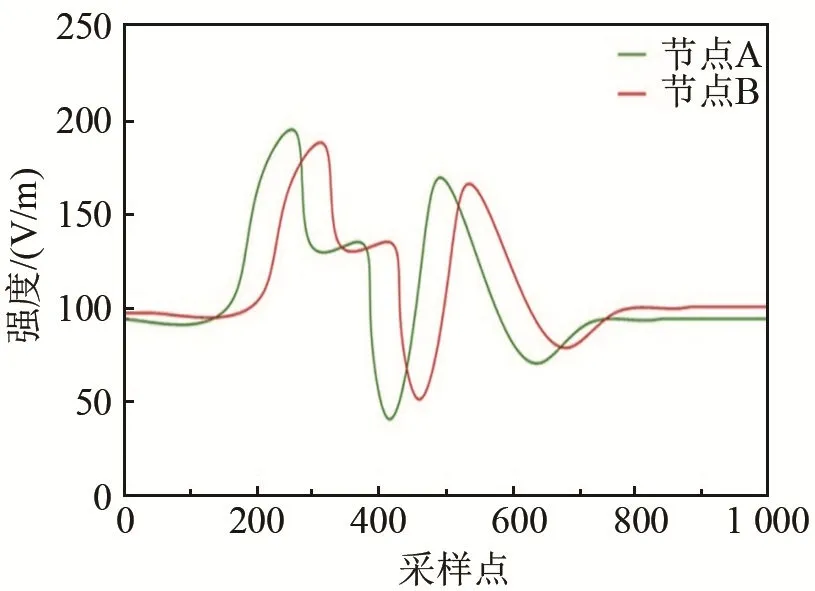
圖2 某大貨車檢測波形Fig.2 The actually detected waveforms of a large truck
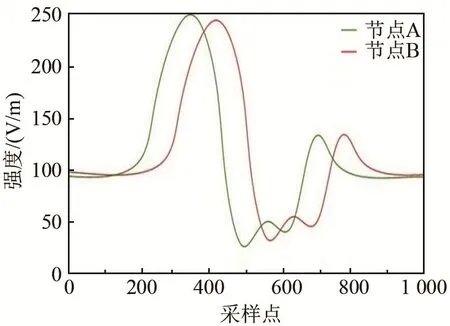
圖3 某小轎車檢測波形Fig.3 The actually detected waveforms of a car
圖3中第一波峰為檢測到的車頭位置,第一波谷為檢測到的底盤位置。對比發現,小轎車底盤較低,車頭也較矮,由此導致磁場變化較大,波峰波谷的數值變化也比大貨車的明顯,車輛識別效果較好。
2.3 雙節點動態采樣法
在實際應用中,為減少檢測難度,很多節點在獲取車輛經過傳感器波形時使用的是固定的采樣率,即使在無車經過、甚至夜晚少車的空閑時段,也按常規采樣率進行采樣,其功耗比重較大[8],對節點壽命非常不利。
為減少功耗,可以采用單點間歇、雙點交替的混合動態采樣間隔和喚醒控制。如圖4所示,單點間歇主要采取按一定的時間間隔T0采集信號,采集一段時間T1,休眠一段時間T0(T0>T1),在采集時間段t內如果有車輛經過,則停止休眠,產生波形曲線,然后進行算法處理,判別車輛狀態,再喚醒無線發送。
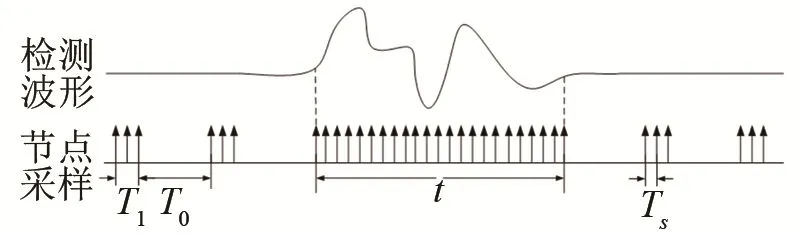
圖4 單點間歇采樣時序Fig.4 Single point intermittent sampling time sequence
雙點交替主要采取同步交替時序機制,節點A休眠時B工作,節點B休眠時A工作,使得空閑休眠時間T0可加大,從而極大地降低功耗,同時減少車輛漏檢的情況,兩節點交替檢測時序如圖5所示。

圖5 兩節點交替檢測時序Fig.5 Two nodes alternate detection sampling time sequence
2.4 基于斜率拐點的加權歐氏距離法
通過對大量采樣后的車輛波形曲線進行分析,發現不同車型的波形不一,即使是同一款車,以不同速度或方向行駛,通過同一地點的波形都不盡相同,但是曲線的突變點(或稱拐點)的數量及類型卻非常相似。此種變化完全可以用不同階段內的斜率特征來體現。因此,本文提出了基于窗口斜率拐點的加權歐氏距離算法進行車輛分類識別。具體描述如下:
(1) 數據預處理
對于檢測到的波形數據進行數字濾波以及歸一化處理。
(2) 劃分網格
對于一個完整的車輛波形曲線,橫坐標為觀測時間段內波形的采樣點數,縱坐標則為處理后的采樣點幅值。利用平行于x軸和y軸的直線將整個坐標軸分割成網格狀,這樣二維波形曲線在平面內被劃分為很多網格[9],如圖6所示。
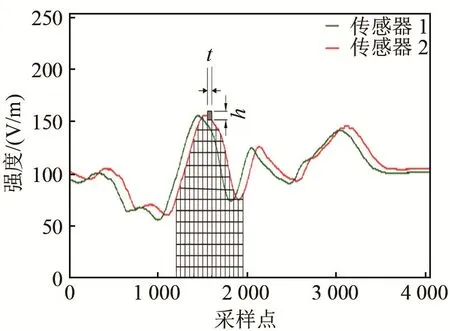
圖6 完整的小轎車波形曲線Fig.6 Complete car waveform curves
(3) 計算窗口斜率
設定窗口閾值為t,網格高度為h。對于任一窗口,幅值可表示為ai,其窗口斜率為

通過計算波形窗口斜率,可直觀反映出曲線變化的急劇程度,但要注意閾值t的選取。
(4) 得出拐點特征向量
(5) 計算歐氏加權距離
通過大數據分析,已確定并在數據庫中存儲了M種已知車型的斜率拐點特征向量,其中,第i種車型的特征值表示為當傳感器檢測到未知車輛時,通過計算該車輛的特征向量Vx與數據庫中已知車型的斜率拐點特征向量Vi的歐氏距離,即可匹配出該車輛的車型,計算公式如下。

其中,wk表示加權量,該值與待測車輛速度有關系,歸一化之后一般可設置為 1。表示未知車型的特征值與已知車型特征值之間的距離,數值越小,代表兩者越相似。如果最小,則判定未知車輛的車型為第k類。
3 實驗及結果分析
為檢測該算法效果,本實驗采用實地檢測,將2個TMR中+CC系列傳感器與線圈安裝至選定道路同一位置進行自由流檢測,記錄過往車輛的數據并保存至文件。
3.1 算法分析
(1) 數據采樣及預處理
采用雙節點動態采樣機制,設T1=20 ms,T0=100 ms時效果較好。將兩個TMR傳感器采樣后的數據存儲至軟件,可顯示出不同類型車輛的波形特征。其中橫軸為采樣點數、縱軸為采樣值。圖 7為某大貨車實際檢測波形,圖8是某小轎車實際檢測波形。
由于小轎車底盤較低,車頭也較矮,離 TMR傳感器距離近,因此檢測到的波形峰值變化較為明顯。
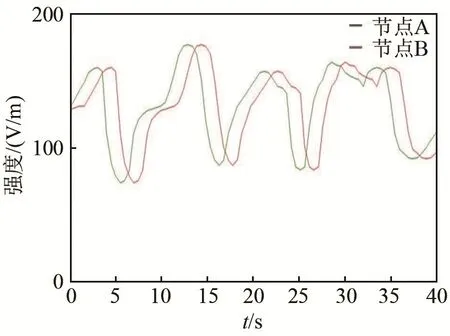
圖7 兩個TMR傳感器采樣后某大貨車檢測波形Fig.7 A large truck waveform detected by two TMR sensors sampling
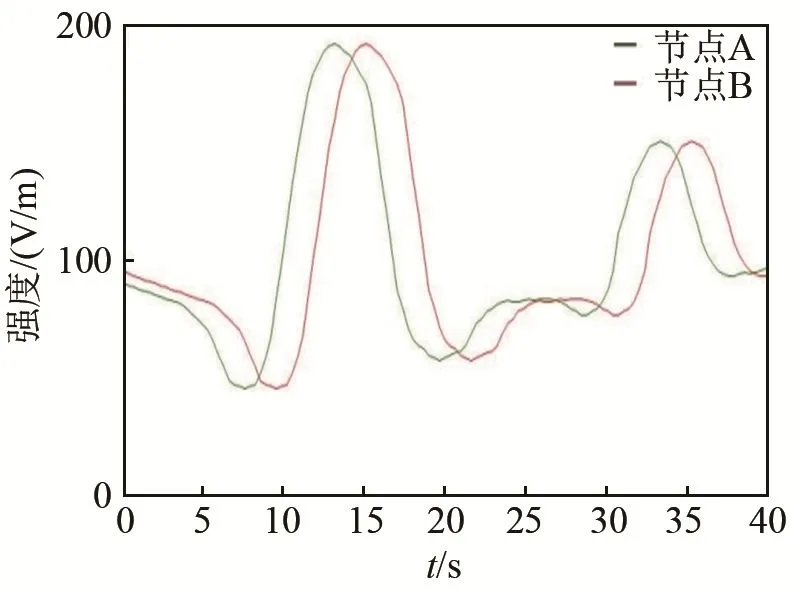
8 兩個TMR傳感器采樣后某小轎車檢測波形Fig.8 A car waveform detected by two TMR sensors sampling
(2) 根據圖形特征,劃分網格,并計算拐點的特征值大小
以圖5節點A為例,通過網格劃分,設窗口閾值t=1 s,則可得出每個窗口的斜率,由此確定拐點及數目,排除干擾點。其該車輛有5個極大值點,采樣的強度值分別為 159、176、156、163、159,另有4個極小值點,采樣的強度值分別為73、86、83、91,則該車輛的極大值拐點特征向量為Vmax=(159,176,156,163,159),極小值拐點特征向量為Vmin=(73,86,83,91)。
(3) 計算加權歐氏距離
表 2為已存儲的部分車輛極大值拐點特征向量,表3為對應的極小值拐點特征向量。
根據式(2),計算待測車輛與已知模板的特征值發現,Vmax與模板 7的歐氏距離最接近,Vmin與模板7的歐氏距離最接近。對照模板表發現,該車輛為大型車,與人工監測結果一致,且計算時耗低,效率高。
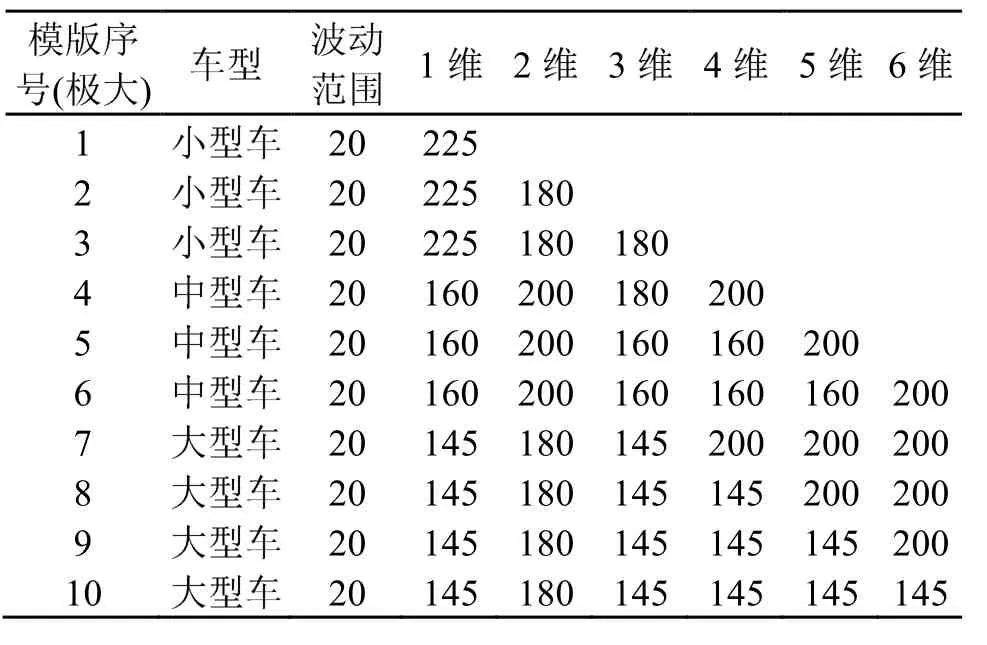
表2 部分車輛極大值拐點特征向量Table 2 The part of feature vectors of vehicle maximum inflection points
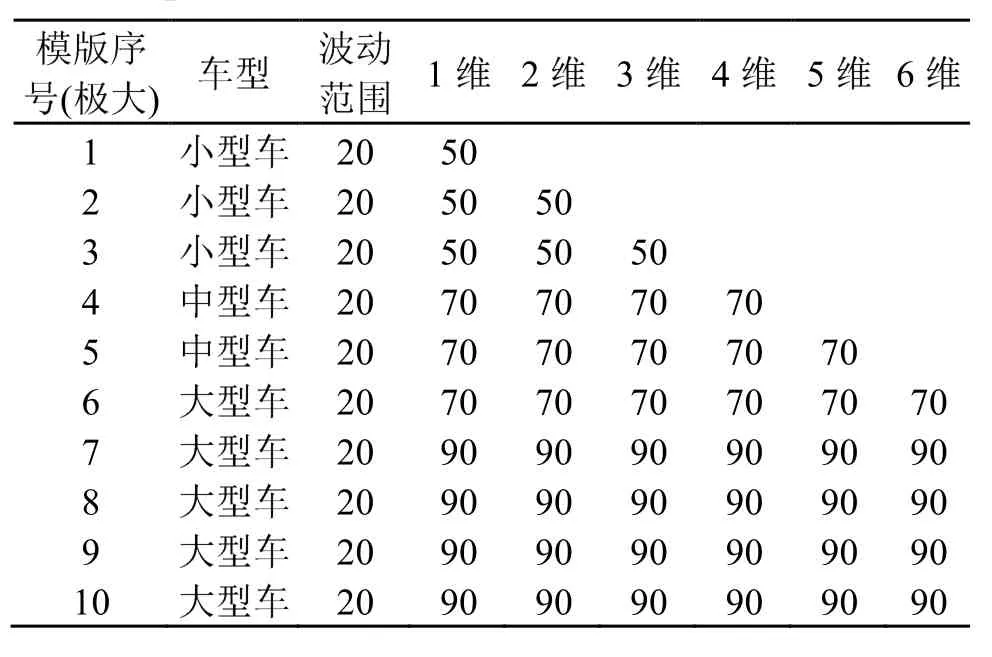
表3 部分車輛極小值拐點特征向量Table 3 The part of feature vectors of vehicle minimum inflection points
3.2 實驗結果
為了更直觀地監測和識別車輛信息,本實驗結合C語言及串口通信技術,開發了一套同步TMR車型識別軟件。該軟件可將TMR傳感器采集到的數據以波形圖的方式實時顯示,并根據以上加權歐氏距離算法,快速地進行車型匹配,得出結論。
圖9~11分別為2.2節提到的小中大型車輛的顯示效果圖。
通過對比極大值、極小值以及波形圖可發現:車型越大,波形圖的拐點或極值點就越多;極大值對應于車頭,車頭距離地面越近,采樣幅值越大;極小值對應于車輛底盤,底盤越低,對應的采樣幅值越高。因此,隨著車型的不斷增大,極大值幅值越小,而極小值幅值越大。
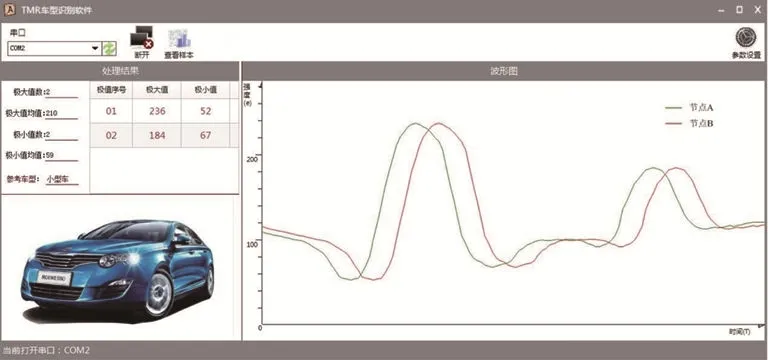
圖9 某小型車識別效果Fig.9 The recognition effect of a small car
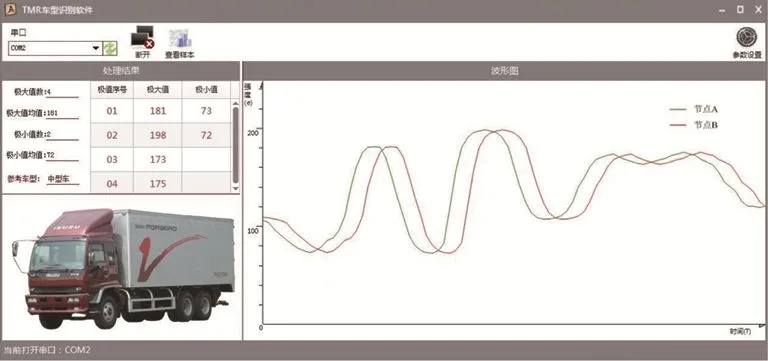
圖10 某中型車識別效果Fig.10 The recognition effect of a medium car
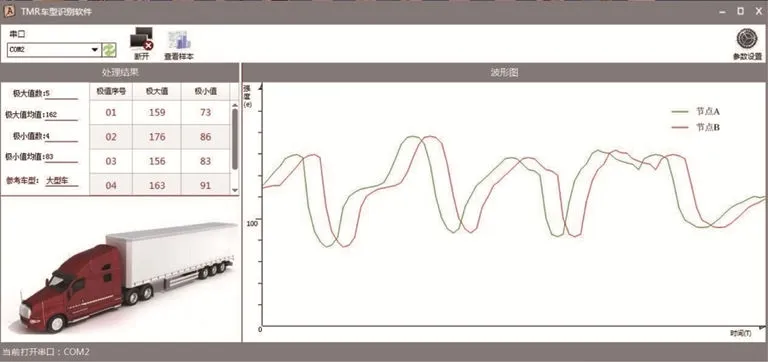
圖11 某大型車識別效果Fig.11 The recognition effect of a large car
3.3 性能分析
本文通過TMR傳感器及線圈對實際道路車輛進行檢測,其流量和車速統計結果如表4、5所示。

表4 流量測試驗證Table 4 Flow test validation
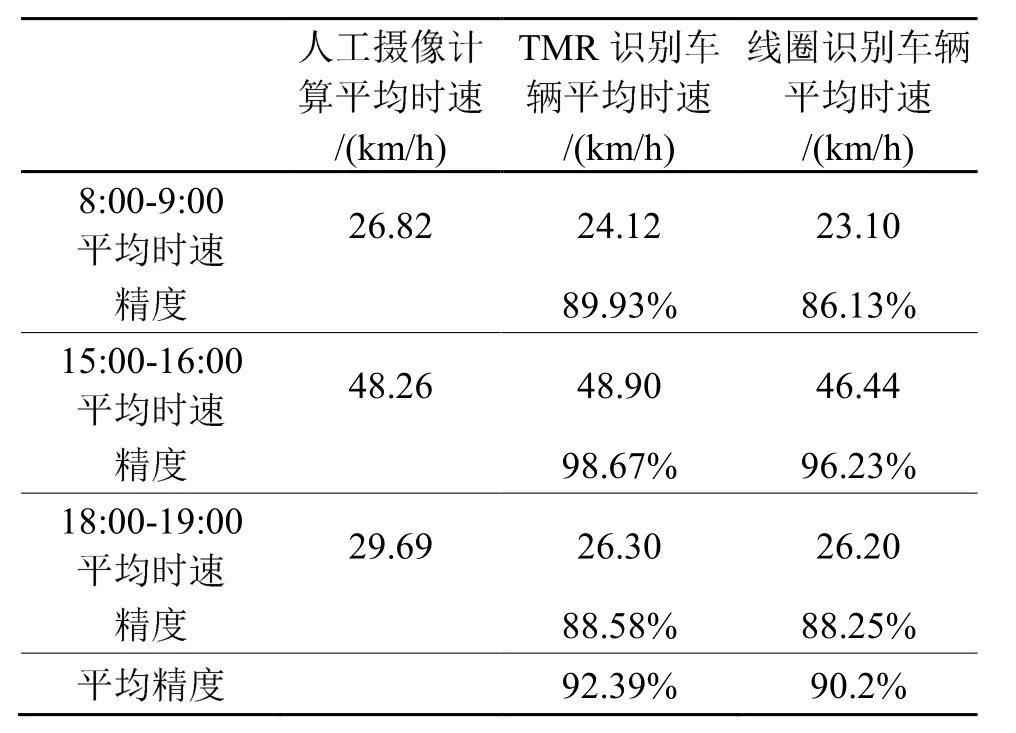
表5 速度測試驗證Table 5 Speed test validation
從以上測試結果來看,TMR效應檢測器在流量檢測方面略低于線圈檢測器的檢測,但在速度檢測方面都高于線圈檢測器,且TMR傳感器功耗低、維護簡單,無傳輸時延。總的來說,TMR效應檢測器在車輛檢測技術中能達到比較好的檢測效果,可廣泛應用于智能交通的車輛檢測中。
4 總 結
本文分析了隧道結磁性電阻效應TMR的原理及特點,并提出單點間歇、雙點交替的動態采樣間隔和喚醒互補檢測方法,配合斜率拐點的加權歐氏距離算法,使得檢測器節點具有功耗更低、體積更小的特點,提高了檢測效率。實驗結果表明,TMR效應檢測技術具有較好的車輛檢測效果,能實時準確地檢測和識別出車輛類型,且使用壽命長,維護方便,該算法是可行和有效的。作為先進的磁效應技術,對其深入研究將具有深遠的實際意義,相信該技術將能夠為智能交通領域注入新的動力。
[1]陸化普, 李瑞敏. 城市智能交通系統的發展現狀與趨勢工程研究[J]. 跨學科視野中的工程, 2014, 6(1): 6-19.
LU Huapu, LI Ruimin. Development status and trend of Urban Intelligent Transportation System[J]. Journal of Engineering Studies, 2014, 6(1): 6-19.
[2]謝旭, 李季隆, 趙俊亮, 等. 基于遺傳算法的車輛參數識別方法[J]. 浙江大學學報(工學版), 2010, 44(8): 1818-1824.
XIE Xu, LI Jilong, ZHAO Junliang, Identification of vehicle parameters based on genetic algorithm[J]. Journal of Zhejiang University (Engineering Science), 2010, 44(8): 1818-1824.
[3]周辰雨, 張亞岐, 李健. 基于 SVM 的車輛識別技術[J]. 科技導報,2012, 30(30): 53-57.
ZHOU Chenyu, ZHANG Yaqi, LI Jian. Vehicle identification technology based on SVM[J]. Science & Technology Review, 2012,30(30): 53-57
[4]雷旭, 侯瑩瑩, 武奇生. 地磁車輛檢測器車型分類算法設計[J]. 長安大學學報(自然科學版), 2013, 33(5): 118-123.
LEI Xu, HOU Yingying, WU Qisheng. Design of vehicle classification algorithm for geomagnetic vehicle detector[J]. Journal of Chang'an University(Natural Science Edition, 2013, 33(5): 118-123.
[5]呂華, 劉明峰, 曹江偉. 隧道磁電阻(TMR)磁傳感器的特性與應用[J]. 磁性材料及器件, 2012, 43(3): 1-5.
LV Hua, LIU Mingfeng, CAO Jiangwei. Performance and applications of magnetic sensors based on TMR effect[J]. Journal of Magnetic Materials and Devices, 2012, 43(3): 1-5.
[6]錢正洪, 白茹, 孫宇澄. GMR/TMR材料及相關自旋電子芯片研究[J]. 功能材料, 2014, 45(10): 10005-10014.
QIAN Zhenghong, BAI Ru, SUN Yucheng. Study on GMR/TMR materials and related spintronic chips[J]. Journal of Functional Materials, 2014, 45(10): 10005-10014.
[7]薛凌云, 謝作孟. 基于TMR檢測的遺傳BP神經網絡車輛分類算法[J]. 杭州電子科技大學學報(自然科學版), 2015, 35(4): 84-87.
XUE Linyun, XIE Zhuomeng. Genetic BP neural network vehicle classification algorithm based on TMR detection[J]. Journal of Hangzhou Dianzi University(Natural Sciences), 2015, 35(4): 84-87.
[8]王麗麗, 賈誠. 巨磁阻效應研究的最近進展[J]. 哈爾濱師范大學自然科學學報, 2005, 21(1): 48-50.
WANG Lili, JIA Cheng. Recent progress in the study of giant magnetoresistance[J]. Natural Science Journal of Harbin Normal University, 2005, 21(1): 48-50.
[9]張建軍, 陳曉, 趙意. 一種無線傳感器節點動態采樣策略[J]. 電子測量與儀器學報, 2016, 30(2): 249-255.
ZHANG Jianjun, CHEN Xiao, ZHAO Yi. A dynamic sampling strategy for wireless sensor nodes[J]. Journal of Electronic Measurement and Instrumentation, 2016, 30(2): 249-255.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48