基于步進LFMCW的多目標雷達檢測算法*
2017-01-16 03:41:38楊宇恒宋春林
通信技術 2016年11期
楊宇恒,宋春林
(同濟大學 電子與信息工程學院,上海 201804)
基于步進LFMCW的多目標雷達檢測算法*
楊宇恒,宋春林
(同濟大學 電子與信息工程學院,上海 201804)
基于毫米波雷達的多目標檢測與跟蹤是智能駕駛領域的研究熱點,其中雷達波形的設計是算法的核心。但是,目前主流的基于LFMCW波形的汽車毫米波雷達檢測算法存在著“虛警高、檢測周期長、無法檢測相對靜止目標、算法復雜度高”等問題。因此,將FSK波形與LFMCW波形結合,提出了一種新的步進LFMCW雷達波形,并設計與實現了相應算法。該算法能夠縮短檢測周期,提高系統響應速度,大幅降低算法的復雜度。通過在多種場景下對新的雷達波形算法進行仿真,結果表明新波形可以很好地進行多目標檢測,并能同時分辨運動目標和相對靜止目標,且性能可靠穩定。
毫米波雷達;多目標檢測;LFMCW;波形設計
0 引 言
汽車避撞控制系統是當前汽車主動安全領域的研究熱點。它奠定了智能駕駛的基礎,使得駕駛安全有了足夠的保障。毫米波雷達因其抗干擾能力強﹑精度高﹑衰減小﹑體積小﹑成本低等優點,成為汽車雷達的首選。而汽車雷達的波形設計是雷達檢測和跟蹤算法的關鍵,直接決定了檢測結果的精確性﹑可靠性和實時性。
目前,汽車毫米波雷達主要基于LFMCW波形。該波形在單目標檢測上性能優越,但在多目標檢測上,存在“虛警高﹑算法復雜”等缺陷。為此,國內外學者提出了一些改進算法。文獻[1]提出的算法測距測速較為方便,只需一個完整的三角波內就可以測得,但是存在速度-距離耦合,虛假目標數倍于真實目標。文獻[2]在文獻[1]的基礎上,在多個周期內調制不同斜率的三角波,使得速度-距離匹配成為可能,但這使系統響應變得緩慢。考慮到系統抽樣頻率的硬件限制,單個三角波周期大約取Tchirp=10 ms就已接近極限,則速度距離匹配需要約5個周期,約需50 ms。此外,多周期內的匹配也需要大量的計算,總體檢測周期變長,這對高速行駛的汽車來說極不安全。德國的學者另辟蹊徑,在文獻[3]中提出一種階梯式的調制波,提高了計算精度與計算速度,但算法復雜度大大提高,對設備的要求也極高。
針對上述問題,本文提出了一種步進調頻與線性連續調頻相結合的波形(步進LFMCW)。它結合FSK波形與LFMCW波形的優點,在FSK波形段采用頻率-相位聯合檢測法,得到不同目標的位置速度信息;在LFMCW段中頻信號中提取三角關系,以分辨出相對靜止的目標。該波形在LFMCW的半周期內進行FSK與LFMCW的交替調制,可以在LFMCW的半個周期內完成測距﹑測速﹑測角,而且不存在速度-距離耦合。
1 毫米波雷達理論基礎
一般來說,一個完整的毫米波汽車雷達系統,如圖1所示。
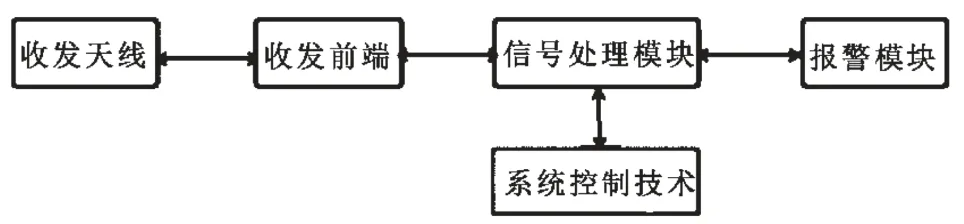
圖1 毫米波汽車雷達系統
射頻收發前端是毫米波汽車雷達系統的核心,主要負責信號調制﹑射頻信號的發射﹑雷達回波接收以及接收信號的解調。它通過接收雷達回波信號,在混頻中與本振信號進行差頻,得到中頻信號[4]。
信號處理模塊主要利用中頻信號,得到目標的距離﹑速度﹑角度等信息,實現目標的檢測和跟蹤。
本文所采用的發射信號波形以頻移鍵控(FSK)體制雷達[5]為研究基礎,其頻率和時間關系如圖2所示。其中,實線為發射波,虛線為反射波。
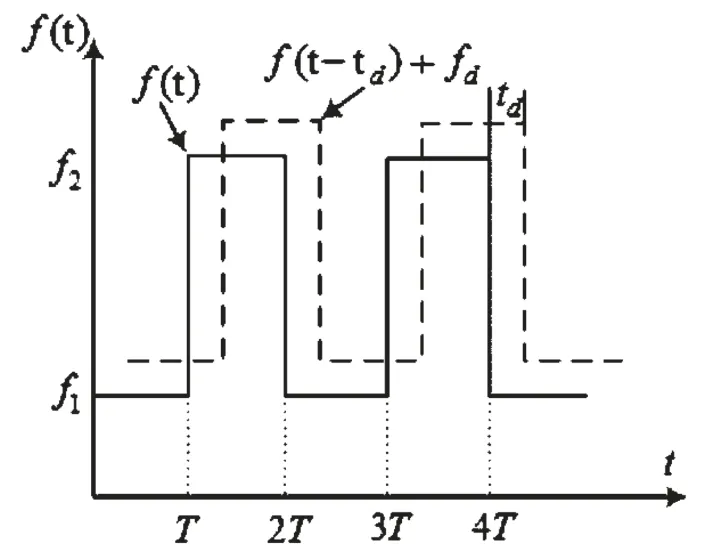
圖2 FSK雷達波
FSK雷達發射信號為:
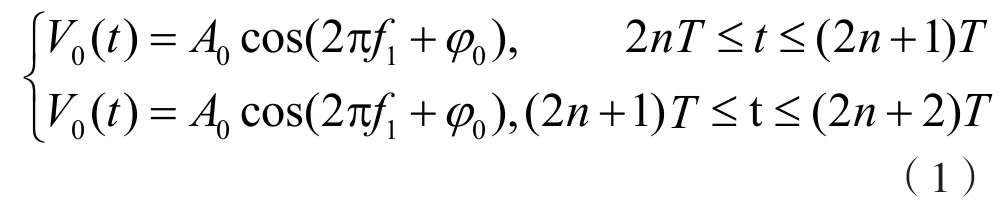
利用多普勒頻移與相位差信息,根據文獻[6],可以得到目標速度與計算公式如下:
其中,Δf是掃頻帶寬,φy1﹑φy2分別是頻率為f0和f1部分多普勒頻率分量的相位,Δφ是兩個中頻信號的相位差,取值范圍[0,2π]。因此,若想要獲得大的測距范圍,就必須使掃頻帶寬足夠大。
對于測角,只需再增加一個接收天線,利用雙接收天線接收信號的相位差,計算得到目標的方位角,具體可以參考文獻[2]。
2 步進LFMCW波形多目標檢測
這是一種同時結合FSK與LFMCW優點的波形。文獻[3]中提到了步進調制波,文獻[6]中推導了具體的計算公式。利用FSK的特性,可以省略多目標匹配的過程,從而縮短檢測周期,利用LFMCW的特性,檢測靜止目標,從而得到一種較為復雜但更加實用的波形。
圖3為步進LFMCW的波形圖,在Tchirp周期內就可以完成對目標的檢測。
在Tchirp周期內,A﹑B﹑C段頻率交替出現。其中,A段頻率之間相差fincr;A﹑B段頻率間相差fshift;C段頻率上升fup;基帶信號帶寬為fsweep;在fsweep內,一共有N個A﹑B﹑C段。其中:

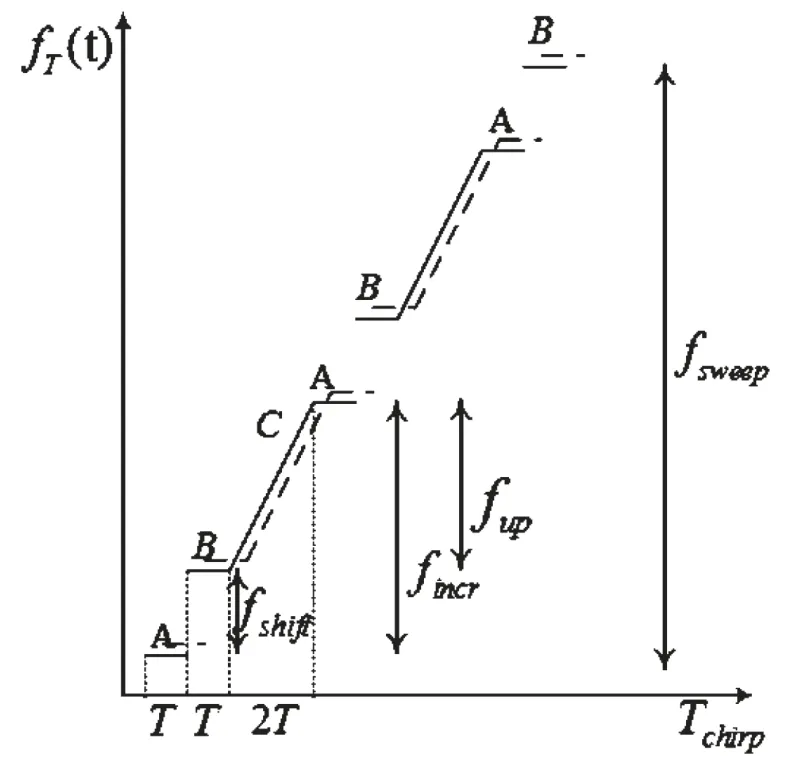
圖3 步進LFMCW波形
2.1 頻移步進段動目標檢測(A、B段)
步進LFMSK回波信號的頻率,如圖3中的虛線所示。
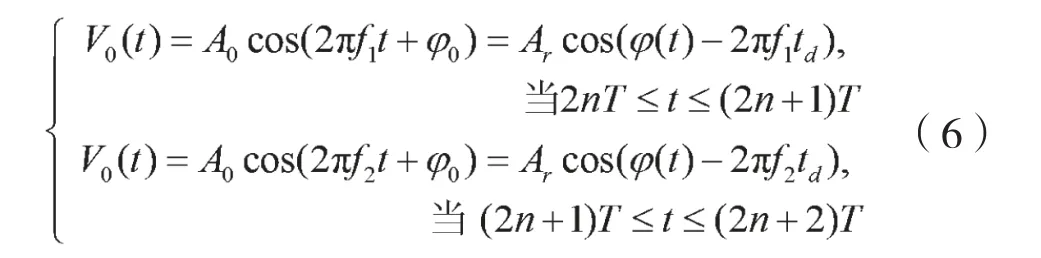
設A﹑B段頻率分別為f1﹑f2,則當前方有目標時,FSK雷達回波信號為:
為方便后期信號處理中傅里葉變換的運算,一般將N取為256﹑512﹑1 024等數字,但要注意采樣頻率是否能滿足要求。
頻移步進段雷達工作周期為2T,即每隔2T時間完成一次檢測。在0~T時間段內,發射信號頻率為f1,回波延時為τ,目標的多普勒頻移為fd。在T~2T時間段內,雷達發射信號頻率為f2,混頻后得到的中頻信號為[2]:
記多普勒頻移為fd≈fd1≈fd2,得到的距離信息為S,速度信息為v。
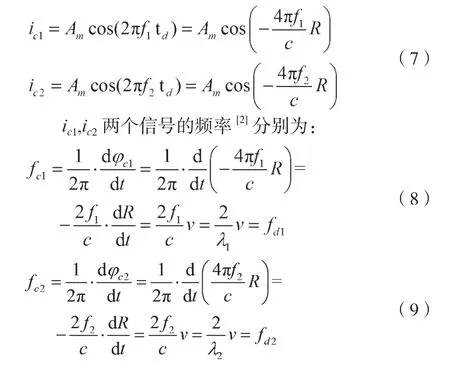
在得到中頻信號后,利用多普勒頻移與相位差信息[2],可以得到目標速度與計算公式如下:

再觀察ic1,ic2信號。這兩個中頻信號頻率幾乎相同,但有著不同的相位,而相位信息能幫助解析出距離信息,可以得到如下關系:

2.2 連續調頻段靜目標檢測(C段)
C段連續調頻的檢測波形,如圖4所示。

圖4 連續調頻段波形
中頻信號隨時間的變化,如圖5所示。
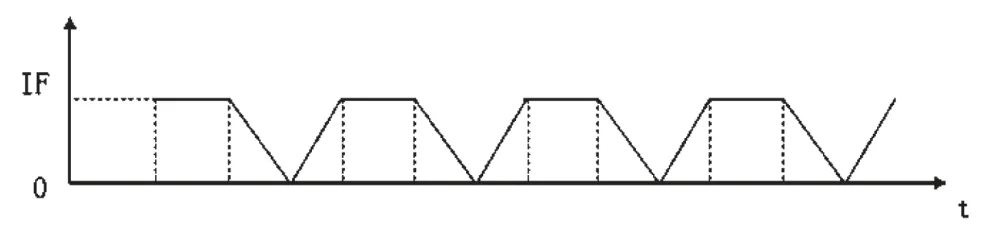
圖5 中頻信號
反射波與發射波的形狀相同,只是在時間上有一個延遲,與目標距離R的關系可表示為:

式中,c為光速。發射信號與反射信號的頻率差即為混頻輸出的中頻信號頻率IF。根據圖4三角關系,可得到[1]:

由此可見,目標距離與雷達前端輸出的中頻頻率成正比,光速c﹑周期T和調制頻寬ΔF已知,只要檢測出中頻信號IF,就可以檢測出目標速度。
在C段中,中頻信號的頻率fdc應為:

此時,從C段信號中測出實際的中頻信號頻率,記為fnc=f1c, f2c, f3c…。從中去掉頻率與fdc相等的分量后,剩下的頻率反映的就是靜止目標的頻率分量IF。靜止目標的距離為:

2.3 方位角測算
方位角的測算可以采用干涉測相,但是會產生相位模糊性[7],這是由于相位測量的結果只能在(-π,π)之間。如果基線長度大于二分之一波長,相位差會超出這一區間,反演出的角度不唯一。本文利用立體基線法進行相位解模糊。當信號入射時,每組基線都有一組測量結果,而只有真正的角度才在每組都有出現。
三個陣元(天線1~天線3)均勻分布在半徑為R=0.1 m的圓上,如圖6所示。
選取不等長基線1-2,1-3。這時,兩根不等長基線的長度分別為:

坐標系中的方位角θij分別為:

根據:

可計算出兩條基線上的所有θmn的估值:
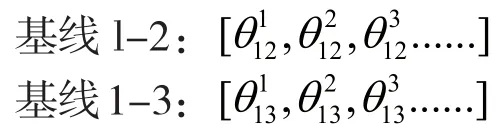
其中,基線1-2較短,解決測角多值性問題;基線1-3較長,以獲得高精度測角值;搜索這兩組值中最相似的一個角度值,即為真實方向角。
3 算法測試與仿真分析
本次仿真設定的雷達檢測目標范圍為1~150 m,目標速度在0~100 m/s范圍,距離分辨率為1 m。根據這一技術指標,將雷達系統各參數設置如下:雷達信號基頻取常用的24 GHz,雷達信號帶寬BW=500 MHz,調頻信號周期Tchirp=5 ms,天線圓半徑R=1 cm,N取512。
反射回波時延引起的最大頻差[8]:

最大多普勒頻移:

最大無模糊距離:

因此,采樣頻率應大于200 kHz。而為保證得到足夠的采樣數據,采樣點數與N同為512,采樣頻率能保證在5 ms內完成采樣。
3.1 步進LFMCW多目標檢測
雷達位于(0,0)位置,生成11個目標進行仿真。其中,2個靜止目標,坐標為(-147.82,36.43)﹑(-149.98,47.68);9個運動目標,坐標為(-35.71,18.97)﹑(-32.00,65.38)﹑(-22.61,88.84)﹑(-16.92,29.98)﹑(25.53,110.50)﹑(69.67,14.99)﹑(6.57,123.02)﹑(-122.22,32.46)﹑(-114.89,36.11)。
表1﹑表2分別為11目標距離結果和11目標速度結果。
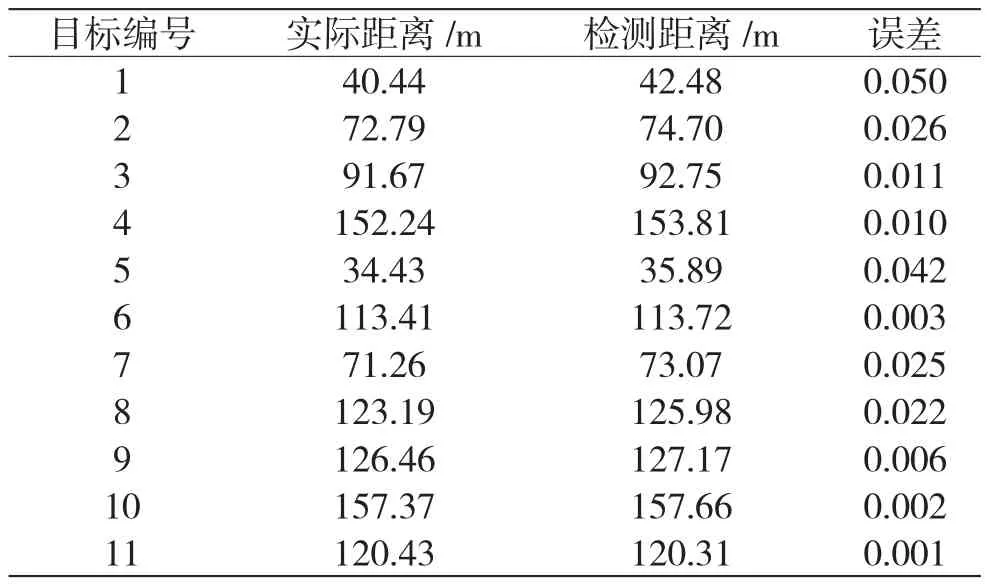
表1 11目標距離結果
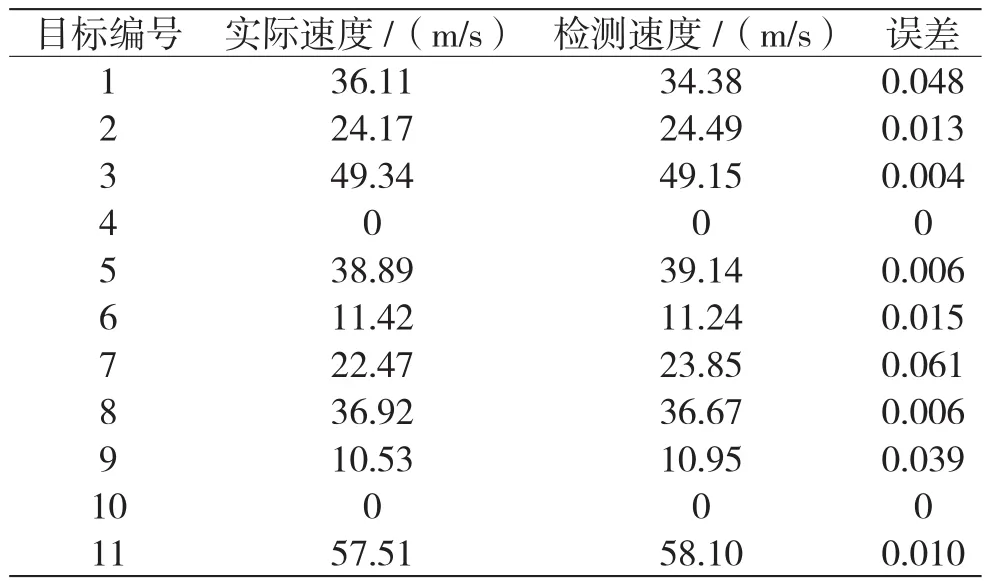
表2 11目標速度結果
由仿真結果可知,步進—LFMCW波形能夠很好地檢測出目標距離與速度,且不論是運動目標還是靜止目標,都可以得到正確的結果。其中,距離檢測平均誤差為1.8%,速度檢測平均誤差為2.0%。部分速度﹑距離較小的目標誤差較大,這是由于雷達的速度﹑距離分辨率較大。可通過增大調制帶寬等方法來減小誤差,但會提高對設備的要求。因此,應根據需求來選擇合適的系統參數。
3.2 與傳統FSK波形的比較
對傳統的FSK波形進行仿真,將其結果與新波形步進LFMCW進行對比。
雷達位于(0,0)位置,生成5個目標進行仿真,坐標分別為(-111.65,142.49)﹑(119.07,51.88)﹑(-122.45,64.27)﹑(-48.82,101.03)﹑(-15.16,33.72), 速度分別為7.82 m/s,46.33 m/s,39.03 m/s,0 m/s,24.56 m/s。可以看到,坐標為(-48.82,101.03)的目標速度為0 m/s。將FSK與步進—LFMSK波形的檢測結果進行對比。理論上,FSK無法檢測出相對靜止的第四個目標。
首先,使用FSK波形的檢測結果,如圖7所示。仿真結果表明,FSK波形丟失了第四個目標,沒能檢測出來,但是其他檢測目標總體較準確。

圖7 FSK波形檢測結果
使用步進—LFMSK波形的檢測結果,如圖8所示。仿真結果顯示,步進—LFMSK波形準確地檢測出了所有目標,靜止目標的信息也能獲取。同時,目標的方位角信息也準確反映在圖中。
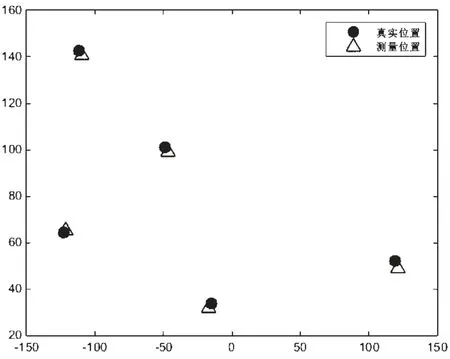
圖8 步進—LFMCW波形檢測結果
3.3 與傳統LFMCW波形的比較
對傳統的LFMCW波形進行仿真,將其結果與新波形步進LFMCW進行對比。
5個目標的信息與3.2節相同。采用LFMCW檢測得到的距離結果及與新波形的比較,如表3所示。
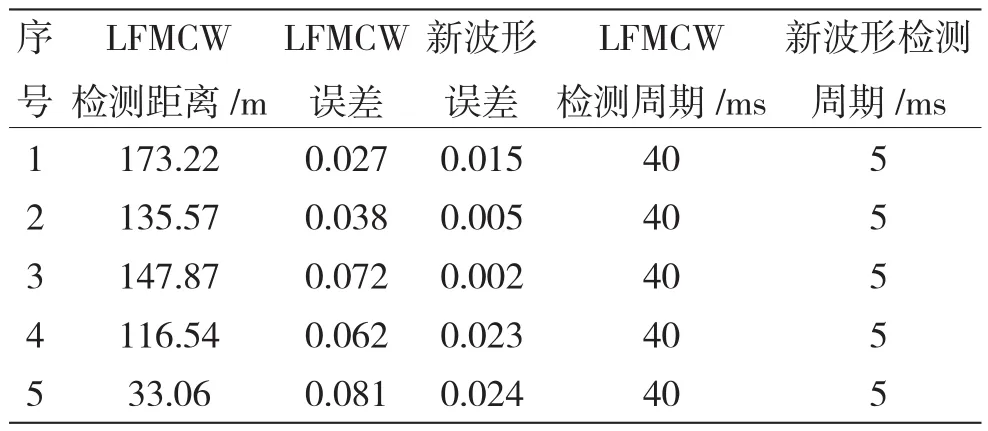
表3 LFMCW目標距離結果及比較
采用LFMCW檢測得到的速度結果及與新波形的比較,如表4所示。
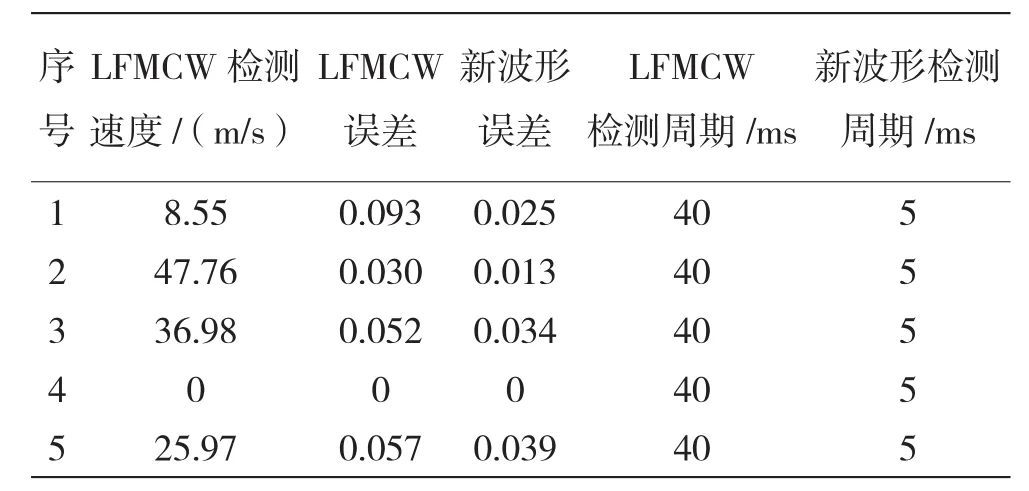
表4 LFMCW目標距離結果及比較
可以看到,不論是速度還是距離的檢測,步進LFMCW的誤差整體都比LFMCW要小。究其原因,第一,LFMCW要進行多周期的上升沿下降沿匹配,帶來了多周期匹配誤差,而步進LFMCW則沒有如此復雜的匹配過程;第二,LFMCW上升沿譜峰和下降沿譜峰同時引入誤差,而步進LFMCW只有單上升沿引入誤差;第三,步進LFMCW的一個明顯優點是大大縮短了檢測周期。
4 結 語
本文針對傳統FSK﹑FMCW雷達檢測算法檢測周期長﹑算法復雜度高﹑無法檢測靜止目標等問題,提出了基于步進FMCW波形的雷達多目標檢測算法。通過仿真分析,證實了該算法不僅能正確檢測出多個目標的距離﹑速度和角度,而且有效降低了算法的復雜度,減少了檢測周期,提高了系統響應速度。這樣的算法性能已經足以運用到實際道路環境中進行目標檢測,有效提高了智能駕駛的安全性。但該算法在測量近距離目標﹑低速目標時,誤差仍然相對較大,且由于速度﹑距離分辨率有限,難免使譜峰頻率出現一定誤差。在外界噪聲嚴重[9]的情況下,也不能保證效果良好,所以今后仍需做進一步的研究。
[1] 賀星辰.FMCW近程測距雷達的差頻信號處理技術研究[D].太原:中北大學,2015.
HE Xing-chen.FMCW Short-range Ranging Radar Signal Processing Technology[D].Taiyuan:North Central University,2015.
[2] 黃文奎.毫米波汽車防撞雷達的設計與實現[D].上海:中國科學院上海微系統與信息技術研究所,2006.
HUANG Wen-kui.Design and Imp lementation of Millimeter Wave Automotive Collision Avoidance Radar[D].Shanghai:Shanghai Institute of Micro SysteMand Information Technology,Chinese Academy of Sciences,2006.
[3] Rohling H.Some Radar Ropics:Waveform Design,Range C Far and Targe t Recogn ition[M].Sp ringer Netherlands:Advances in Sensing with Security Applications,2006:293-322.
[4] Rohling H,Meinecke M M.Waveform Design Principles for Au tomotive Radar Systems[C].International Conference on Radar,2001:1-4.
[5] 劉艷.FMCW汽車防撞雷達的多目標信號處理方法研究[D].南京:南京理工大學,2004.
LIU Yan.Research on Multi Target Signal Processing Method for FMCW Automotive Collision Avoidance Radar[D].Nanjing:Nanjing University of Science and Technology,2004.
[6] 張恒,姚森杰,董曦.基于步進頻連續波雷達的多目標識別方法[J].艦船電子對抗,2015,38(04):66-69.
ZHANG Heng,YAO Sen-jie,DONG Xi.Multi Target Recognition Method based on Stepped Frequency Continuous Wave Radar[J].Shipboard Electronic Warfare,2015,38(04):66-69.
[7] 張正言,李小波,徐旭宇等.雙基地MIMO雷達目標角度快速跟蹤算法[J].信號處理,2016,32(06):701-706.
ZHANG Zheng-yan,LI Xiao-bo,XU Xu-yu,et al.A Fast Tracking Algorithm for Bistatic MIMO Radar Target Angle[J].Signal Processing,2016,32(06):701-706.
[8] 杜佳,宋春林.一種改進的毫米波雷達多目標檢測算法[J].通信技術,2015,48(07):808-813.
DU Jia,SONG Chun-lin.An Improved M illimeter Wave Radar Multi Target Detection A lgorithm[J]. Communication Technology,2015,48(07):808-813.
[9] 趙寅,周新志.雷達信號處理中動目標檢測的研究[J].通信技術,2011,44(03):139-140.
ZHAO Yin,ZHOU Xin-zhi.Research on Moving Target Detection in Radar Signal Processing[J].Communication Technology,2011,44(03):139-140.
Radar M ulti-Target Detection Algorithm based on Step-LFMCW
YANG Yu-heng, SONG Chun-lin
(College of Electronics and Information Engineering, Tongji University, Shanghai 201804, China)
Radar target detection and tracking based on millimeter wave becomes a research hotspot in the field of intelligent driving. Radar waveform design is the core of the algorithm, and however the current mainstream waveform detection algorithms based on FMCW have the problems like false alarm, long testingcycle, difficult detecting of stationary targets and fairly high algorithm complexity. Thus by combining FSK waveform with LFMCW waveform, a new waveform of Step - LFMCW is proposed, which, with corresponding algorithm, can shorten the testing cycle, improve the system response speed and greatly reduce the algorithm complexity. And the simulation in multiple sciences indicates that the new waveform is fairly good in multitarget detection and distinguishing moving targets from stationary targets simultaneously, and reliable and stable in performance.
millimeter-wave radar; multi-target detection; LFMCW; waveform design

TN929
A
1002-0802(2016)-11-1453-06
10.3969/j.issn.1002-0802.2016.11.008
楊宇恒(1991—),男,碩士研究生,主要研究方向為信號與信息處理;
宋春林(1973—),男,博士,副教授,主要研究方向為移動通信﹑數字圖像處理。
2016-07-05;
2016-10-09 Received date:2016-07-05;Revised date:2016-10-09
上海市自然科學基金(No.14ZR 1442700)
Foundation Item: Shanghai Natural Science Foundation(No.14ZR1442700)
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25