基于PRSM法的噴水織機(jī)打緯機(jī)構(gòu)剛體動(dòng)力學(xué)平衡優(yōu)化
2017-01-13 03:12:26孫志宏江長(zhǎng)云許亞紅RAHMANHabibur
關(guān)鍵詞:優(yōu)化
毛 瑩,孫志宏,江長(zhǎng)云,許亞紅,RAHMAN Habibur
(東華大學(xué) 機(jī)械工程學(xué)院,上海 201620)
基于PRSM法的噴水織機(jī)打緯機(jī)構(gòu)剛體動(dòng)力學(xué)平衡優(yōu)化
毛 瑩,孫志宏,江長(zhǎng)云,許亞紅,RAHMAN Habibur
(東華大學(xué) 機(jī)械工程學(xué)院,上海 201620)
打緯機(jī)構(gòu)動(dòng)平衡問(wèn)題的研究對(duì)解決織機(jī)存在較大震動(dòng)和噪聲的現(xiàn)狀有重要意義.為了更好地解決打緯機(jī)構(gòu)在慣性打緯時(shí)對(duì)機(jī)架產(chǎn)生的震動(dòng)力和震動(dòng)力矩,在保證打緯工藝的條件下,采用一種新方法——部分冗余伺服電機(jī)(PRSM)法,結(jié)合配重法對(duì)噴水織機(jī)的四連桿打緯機(jī)構(gòu)進(jìn)行剛體動(dòng)力學(xué)平衡優(yōu)化,驗(yàn)證了部分冗余伺服電機(jī)法對(duì)四連桿打緯機(jī)構(gòu)剛體動(dòng)力學(xué)平衡的有效性,為該方法在其他連桿機(jī)構(gòu)中的應(yīng)用提供參考.
打緯機(jī)構(gòu);部分冗余伺服電機(jī)法;動(dòng)力學(xué);平衡
打緯機(jī)構(gòu)作為織機(jī)的五大機(jī)構(gòu)之一,其性能直接影響著織機(jī)的整機(jī)性能. 四連桿打緯機(jī)構(gòu)各構(gòu)件加速度周期性變化引起的慣性力和慣性力矩作用在機(jī)架上產(chǎn)生震動(dòng)力和震動(dòng)力矩,它們是引起織機(jī)震動(dòng)和噪聲的主要原因之一[1]. 因此,降低慣性打緯機(jī)構(gòu)在打緯時(shí)對(duì)機(jī)架產(chǎn)生的震動(dòng)力和震動(dòng)力矩,已成為實(shí)際生產(chǎn)中面臨的主要問(wèn)題.
目前,對(duì)四連桿打緯機(jī)構(gòu)進(jìn)行震動(dòng)平衡的方法主要是配重法、調(diào)整構(gòu)件尺寸以及附加彈性元件等. 近幾年,文獻(xiàn)[24]提出了部分冗余伺服電機(jī)法(簡(jiǎn)稱PRSM法),經(jīng)研究其對(duì)剛性和彈性四連桿、五連桿機(jī)構(gòu)的動(dòng)力學(xué)平衡有較好的優(yōu)化效果. 因此,本文采用PRSM法并結(jié)合傳統(tǒng)的配重法,在不考慮彈性的情況下,以RFJW10智能型噴水織機(jī)的四連桿打緯機(jī)構(gòu)為研究對(duì)象進(jìn)行動(dòng)力學(xué)平衡優(yōu)化.
1 機(jī)構(gòu)的動(dòng)力學(xué)分析
四連桿打緯機(jī)構(gòu)一般由偏心曲軸、牽手、筘座及筘座腳4個(gè)部分組成,在本文中將筘座及筘座腳作為一個(gè)整體進(jìn)行處理. 圖1和2分別為四連桿打緯機(jī)構(gòu)的機(jī)構(gòu)簡(jiǎn)圖以及構(gòu)件的受力分析圖,其中:S1、S2、S3為各構(gòu)件質(zhì)心;m1、m2、m3為各構(gòu)件質(zhì)量;θ1、θ2、θ3為各構(gòu)件質(zhì)心與桿長(zhǎng)的夾角;l1、l2、l3、l4為各構(gòu)件長(zhǎng)度;Fr21x、Fr21y、Fr41x、Fr41y、Fr32x、Fr32y、Fr43x、Fr43y為各構(gòu)件的運(yùn)動(dòng)副受力;F1x、F1y、F2x、F2y、F3x、Fr3y為各構(gòu)件質(zhì)心所受慣性力;Mb為輸入轉(zhuǎn)矩.
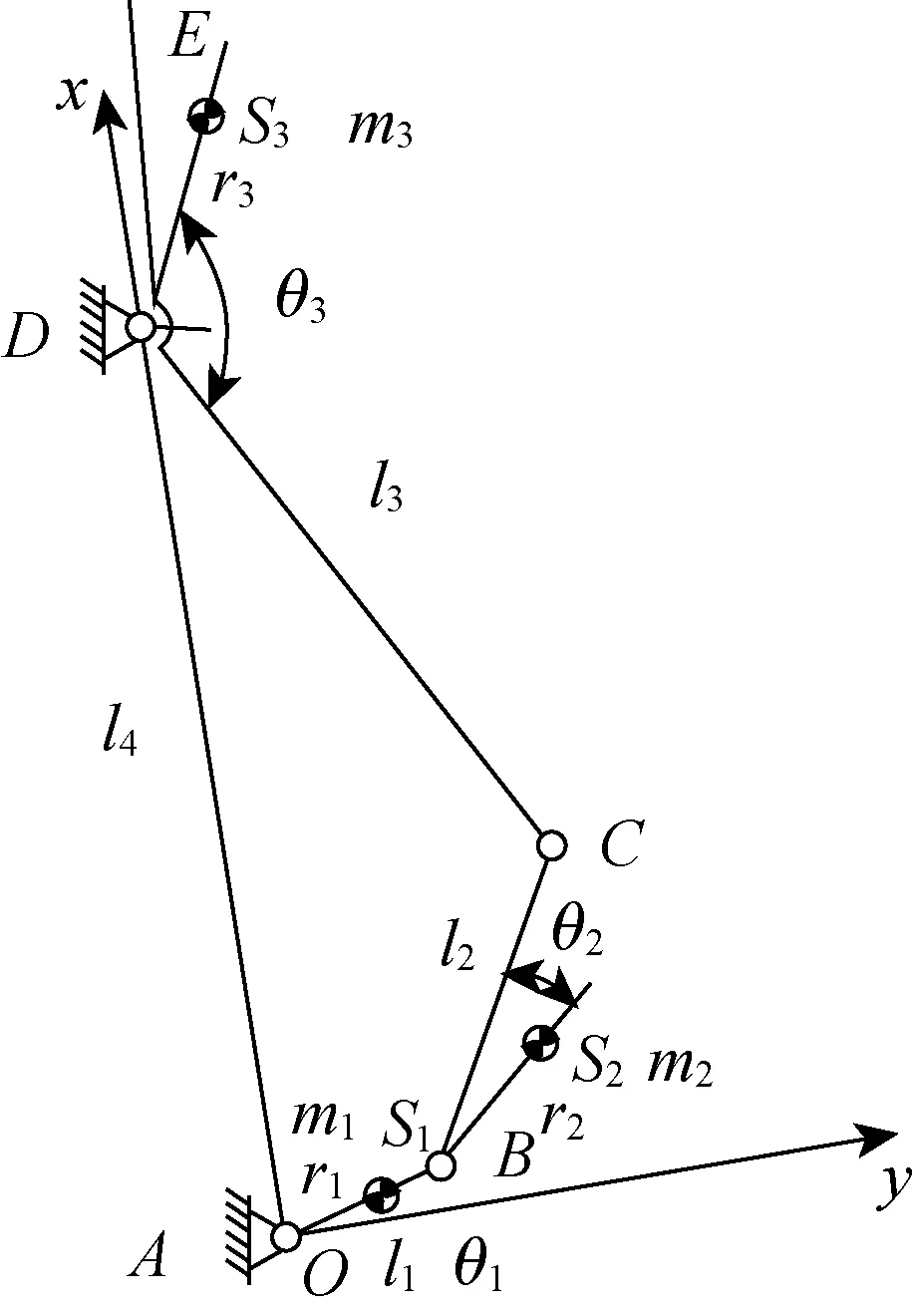
圖1 四連桿打緯機(jī)構(gòu)簡(jiǎn)圖Fig.1 Four-link beating-up mechanism sketch

圖2 構(gòu)件的受力分析圖Fig.2 Stress analysis of parts
根據(jù)達(dá)朗貝爾原理可知,各構(gòu)件所受諸力與其所受慣性力組成平衡力系[5 - 6],因此,分別對(duì)打緯機(jī)構(gòu)各桿件的質(zhì)心點(diǎn)取矩,可以寫出平衡方程式,其基本形式為
(1)
其中:Fx,F(xiàn)y分別為各運(yùn)動(dòng)副受力和各構(gòu)件所受慣性力在x軸、y軸方向上的合力;M為各構(gòu)件在質(zhì)心處所受的合力矩.
為便于Matlab編程求解,將以上線性方程組表達(dá)成矩陣形式的平衡方程:
C*FR=D
(2)
式中:C為系數(shù)矩陣;FR為未知力列陣;D為已知力列陣. 其中
(3)
其中:xS1、yS1、xS2、yS2、xS3、yS3為各構(gòu)件質(zhì)心的坐標(biāo);xA、yA、xB、yB、xC、yC、xD、yD為各構(gòu)件運(yùn)動(dòng)副的坐標(biāo).
FR=[ MbFr14xFr14yFr12xFr12y
(4)
D=[ -M1-F1x-F1y-M2-F2x
-F2y-M3-F3x-F3y]T
(5)
機(jī)構(gòu)的震動(dòng)力可表示為
(6)
取鉸鏈點(diǎn)A作為對(duì)象,則打緯機(jī)構(gòu)相對(duì)于鉸鏈點(diǎn)A的震動(dòng)力矩可以表示為
Msh=-(Fr43y·l4+Mb)
(7)
2 打緯機(jī)構(gòu)的配重法平衡
任意一個(gè)平面四桿機(jī)構(gòu),其總質(zhì)心的位置可以
表示為
(8)

當(dāng)平面四桿機(jī)構(gòu)總質(zhì)心保持靜止(即rC為常數(shù))時(shí),其震動(dòng)力能夠達(dá)到完全平衡.因此,根據(jù)配重法對(duì)打緯機(jī)構(gòu)進(jìn)行平衡,四連桿打緯機(jī)構(gòu)在配重前后的參數(shù)如表1所示.
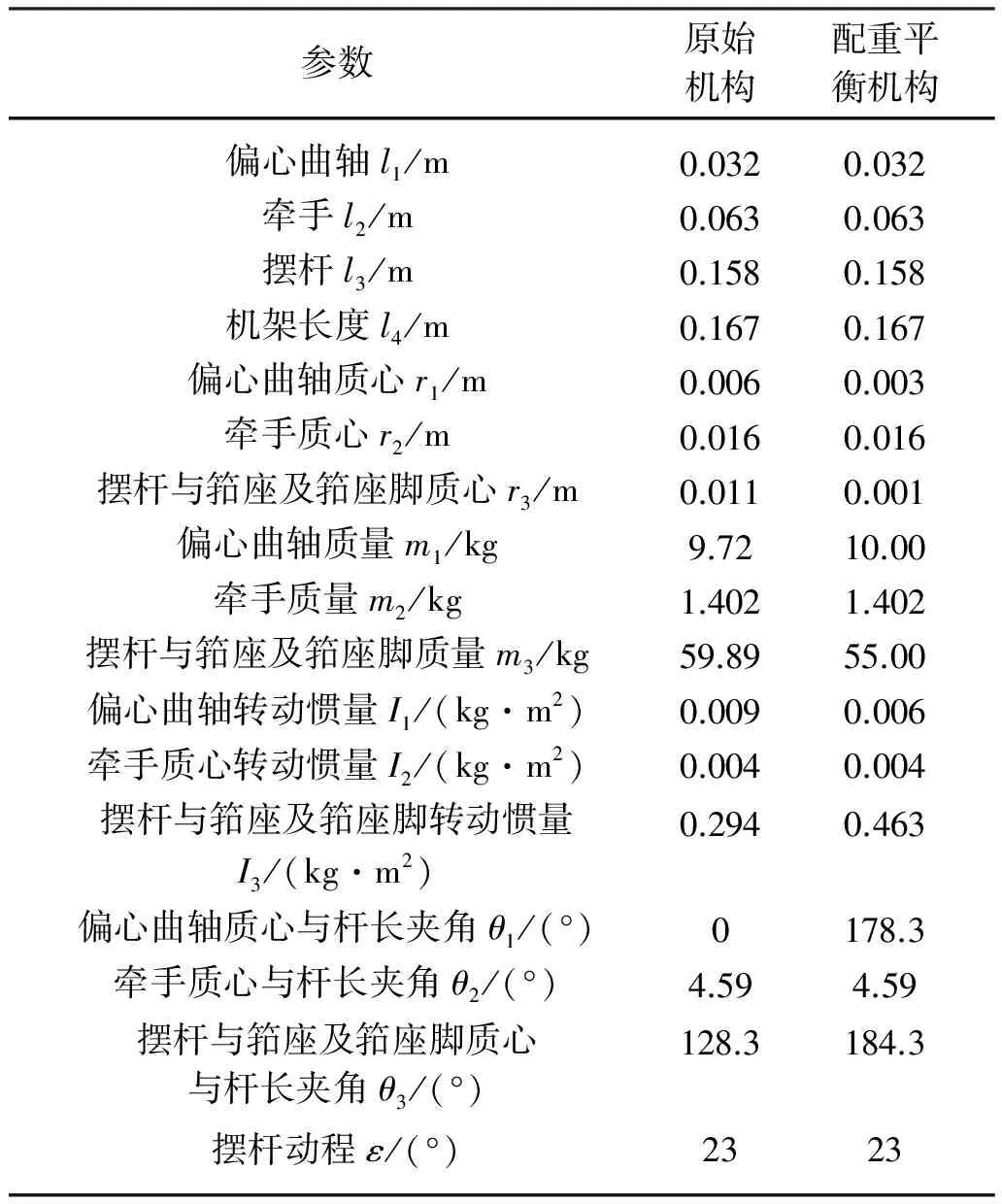
表1 四連桿打緯機(jī)構(gòu)參數(shù)Table 1 Parameters of four-link beating-up mechanism
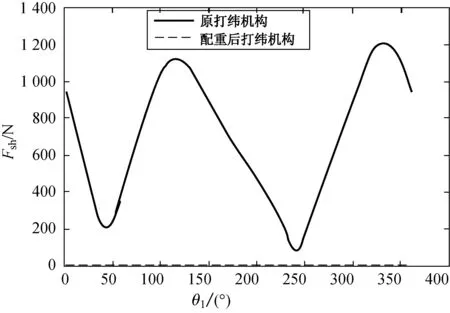
(a) 震動(dòng)力
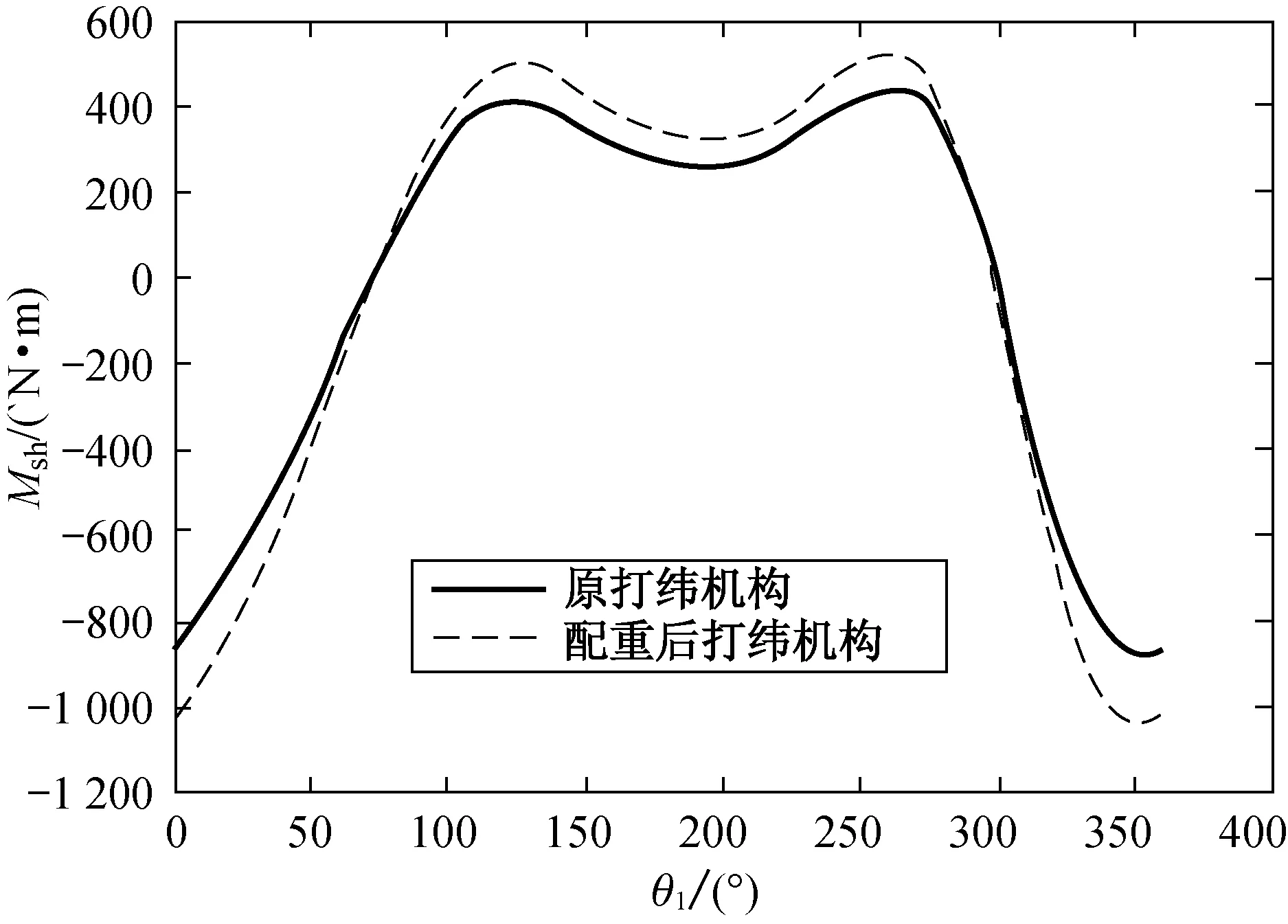
(b) 震動(dòng)力矩圖3 配重前后震動(dòng)力圖及震動(dòng)力矩圖Fig.3 Shaking force and shaking moment before and after counter weight
利用Matlab計(jì)算得到配重法優(yōu)化前后打緯機(jī)構(gòu)的震動(dòng)力和震動(dòng)力矩變化規(guī)律,曲線分別如圖3所示.經(jīng)過(guò)配重法平衡后的震動(dòng)力有較大的改善,幾乎為零(圖3(a));但震動(dòng)力矩有所增大(圖3(b)),產(chǎn)生這種現(xiàn)象主要原因是經(jīng)配重后,桿件的轉(zhuǎn)動(dòng)慣量有所增加,導(dǎo)致了震動(dòng)力矩的增大,因此本文將在此基礎(chǔ)上,再利用PRSM法對(duì)機(jī)構(gòu)的震動(dòng)力矩進(jìn)行平衡.
3 利用PRSM法對(duì)打緯機(jī)構(gòu)的平衡
RFJW10智能型噴水織機(jī)打緯機(jī)構(gòu)的幾何參數(shù)如表1所示,設(shè)織機(jī)轉(zhuǎn)速n=800 r/min,周期T=0.075 s.對(duì)打緯機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)學(xué)分析可得,打緯時(shí)鋼筘的角加速度為α=2.2×103rad/s2.同時(shí)根據(jù)噴水織機(jī)打緯的工藝要求可知,主軸一周內(nèi)織機(jī)各部件的運(yùn)動(dòng)關(guān)系如表2所示.
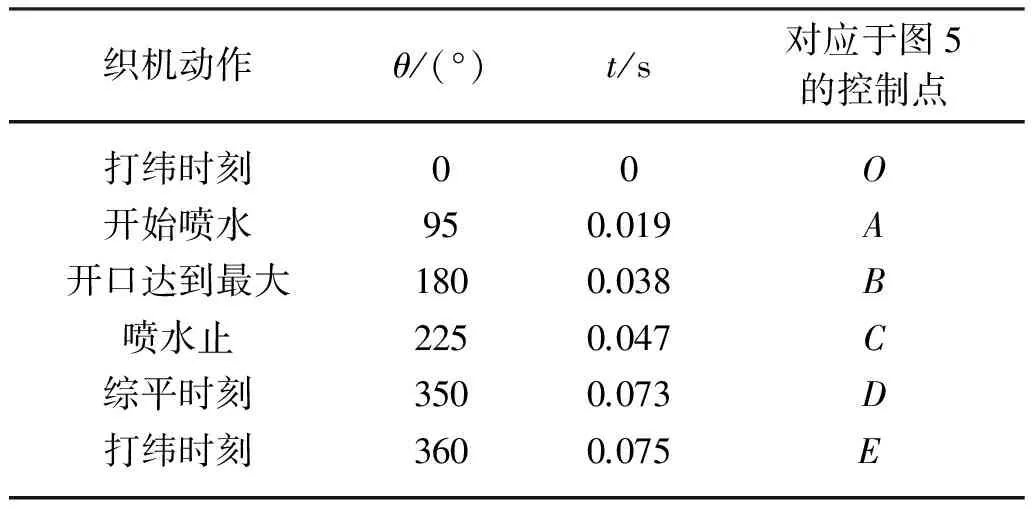
表2 噴水織機(jī)各構(gòu)件運(yùn)動(dòng)配合表Table 2 Motion coordination of different mechanisms in the water-jet loom
注:主軸轉(zhuǎn)角θ是指織機(jī)各動(dòng)作所對(duì)應(yīng)的主軸轉(zhuǎn)動(dòng)角度;時(shí)間t是指一個(gè)周期內(nèi)主軸轉(zhuǎn)角所對(duì)應(yīng)的時(shí)間點(diǎn);控制點(diǎn)代表的是電機(jī)運(yùn)動(dòng)曲線上與主軸轉(zhuǎn)角對(duì)應(yīng)的點(diǎn)(如圖4所示).
為保證產(chǎn)生足夠大的打緯力并滿足織機(jī)三大運(yùn)動(dòng)(開(kāi)口、引緯、打緯)之間的運(yùn)動(dòng)配合要求,利用PRSM法對(duì)打緯機(jī)構(gòu)進(jìn)行動(dòng)平衡優(yōu)化時(shí)的約束條件(1)打緯時(shí)刻鋼筘的角加速度達(dá)到α=2.2×103rad/s2;(2)伺服電機(jī)轉(zhuǎn)角(qi/(°),i=0, 1,…, 5)曲線必須經(jīng)過(guò)表2中所列控制點(diǎn).如圖4所示,虛線表示常速電機(jī)的轉(zhuǎn)角曲線,實(shí)線代表的是滿足約束條件的伺服電機(jī)的轉(zhuǎn)角曲線.
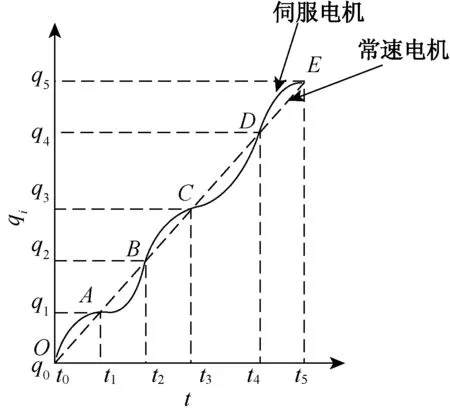
圖4 伺服電機(jī)轉(zhuǎn)角曲線Fig.4 Servo motor rotation curve
通過(guò)配重法已經(jīng)使打緯機(jī)構(gòu)在運(yùn)動(dòng)過(guò)程中產(chǎn)生的震動(dòng)力得到了有效的平衡.當(dāng)震動(dòng)力完全平衡后,機(jī)構(gòu)的震動(dòng)力矩為力偶矩.因此取優(yōu)化目標(biāo)函數(shù):
(9)
在確定約束條件和優(yōu)化目標(biāo)函數(shù)的條件下,利用Matlab中的遺傳算法,采用概率化尋優(yōu)方法,自適應(yīng)地在全局范圍內(nèi)尋找設(shè)計(jì)變量,以獲得目標(biāo)函數(shù)的最優(yōu)解.
文獻(xiàn)[2]中采用了式(10)~(12)所示的3種多項(xiàng)式曲線作為伺服電機(jī)轉(zhuǎn)角曲線,并取得了較好的優(yōu)化效果,因此本文中繼續(xù)采用此3種多項(xiàng)式曲線,并根據(jù)控制點(diǎn)之間的特性,在同一個(gè)周期將這3種多項(xiàng)式曲線規(guī)律進(jìn)行組合,同時(shí)保證各規(guī)律在控制點(diǎn)處分別滿足一階導(dǎo)數(shù)連續(xù),二階導(dǎo)數(shù)連續(xù)和三階導(dǎo)數(shù)連續(xù).各段中伺服電機(jī)轉(zhuǎn)角曲線的規(guī)劃如表3所示.
五次多項(xiàng)式:
q1(t)=a0+a1t+…+a4t4+a5t5
(10)
七次多項(xiàng)式:
q2(t)=a0+a1t+…+a6t6+a7t7
(11)
九次多項(xiàng)式:
q3(t)=a0+a1t+…+a8t8+a9t9
(12)
其中:a0, a1,…, a9為需要通過(guò)GA求得的當(dāng)目標(biāo)函數(shù)最小值時(shí)的多項(xiàng)式轉(zhuǎn)角曲線系數(shù).
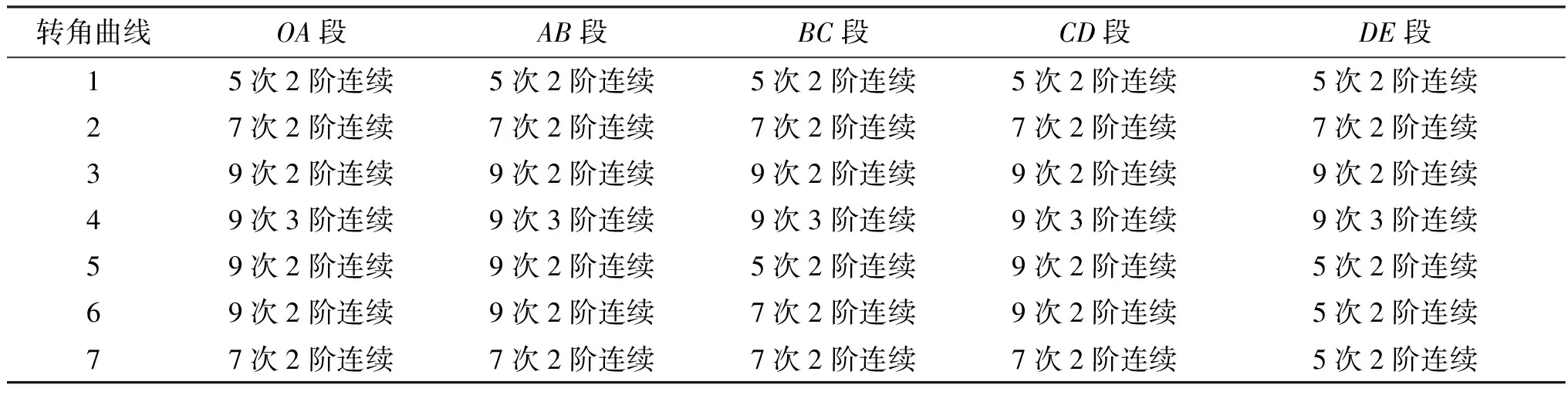
表3 伺服電機(jī)轉(zhuǎn)角曲線規(guī)劃Table 3 Planning for the servo motor rotation curve
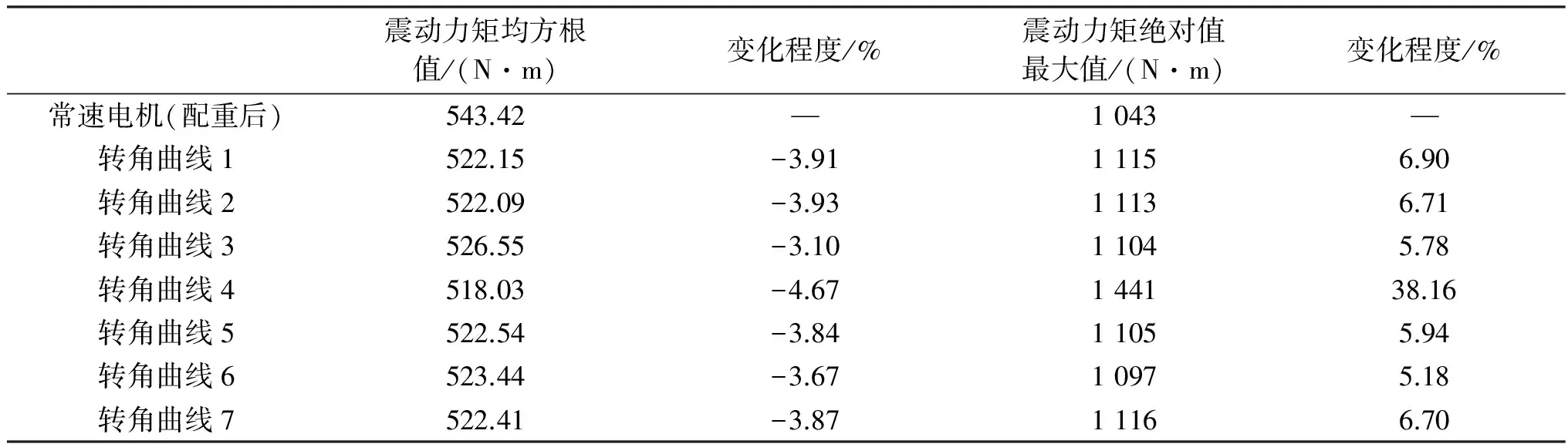
表4 打緯機(jī)構(gòu)震動(dòng)力矩平衡優(yōu)化效果Table 4 Optimization results of the beating-up mechanism’s shaking moment
經(jīng)Matlab優(yōu)化,震動(dòng)力矩Msh的平衡情況如圖5所示.表4是打緯機(jī)構(gòu)震動(dòng)力矩平衡優(yōu)化效果.

圖5 震動(dòng)力矩的平衡情況Fig. 5 Shaking moment balancing
從圖5和表4中可以看出:
(1)對(duì)于優(yōu)化目標(biāo)OF而言,7種伺服電機(jī)轉(zhuǎn)角曲線對(duì)打緯機(jī)構(gòu)動(dòng)平衡優(yōu)化均有效果,其中轉(zhuǎn)角曲線4的優(yōu)化效果最好,震動(dòng)力矩的均方根值從543.42 N·m下降到518.03 N·m,下降了4.67%;
(2)對(duì)于7種伺服電機(jī)轉(zhuǎn)角曲線,優(yōu)化后震動(dòng)力矩絕對(duì)值的最大值都有所增大,其中轉(zhuǎn)角曲線4的增幅最大,從1 043N·m增大到1 441N·m,上升了38.16%,產(chǎn)生這種現(xiàn)象的原因是優(yōu)化過(guò)程中,需要保證打緯力足夠大的要求,且震動(dòng)力矩最大值的點(diǎn)出現(xiàn)在打緯時(shí)刻附近,此時(shí)震動(dòng)力矩的增大利于慣性打緯.
綜上可得,轉(zhuǎn)角曲線4(9次多項(xiàng)式3階連續(xù))對(duì)打緯機(jī)構(gòu)動(dòng)平衡的優(yōu)化效果較其他轉(zhuǎn)角曲線好,PRSM法對(duì)打緯機(jī)構(gòu)震動(dòng)力矩的平衡有效.
4 結(jié) 語(yǔ)
本文首次將PRSM法應(yīng)用于噴水織機(jī)打緯機(jī)構(gòu)的震動(dòng)平衡研究. 在建立了動(dòng)力學(xué)模型的基礎(chǔ)上,先采用配重法對(duì)打緯機(jī)構(gòu)進(jìn)行震動(dòng)力的完全平衡,然后利用PRSM法對(duì)震動(dòng)力矩進(jìn)行優(yōu)化. 通過(guò)遺傳算法求得7種伺服電機(jī)轉(zhuǎn)角曲線,將這7種運(yùn)動(dòng)規(guī)律下打緯機(jī)構(gòu)的震動(dòng)力矩與勻速電機(jī)驅(qū)動(dòng)下的情況進(jìn)行對(duì)比可知,PRSM法對(duì)打緯機(jī)構(gòu)的震動(dòng)平衡是有效的.由于打緯機(jī)構(gòu)震動(dòng)力的完全平衡在工程實(shí)際中的實(shí)現(xiàn)有難度,因此,在后續(xù)的研究中,將PRSM法應(yīng)用于震動(dòng)力部分平衡的打緯機(jī)構(gòu)上,以震動(dòng)力和震動(dòng)力矩均方根的加權(quán)值為優(yōu)化目標(biāo)進(jìn)行優(yōu)化,也取得了較好的優(yōu)化效果.
本文用PRSM法對(duì)打緯機(jī)構(gòu)進(jìn)行動(dòng)平衡優(yōu)化后,打緯機(jī)構(gòu)的震動(dòng)力矩仍有些許震蕩,后續(xù)可以研究不同的伺服電機(jī)轉(zhuǎn)角規(guī)律,以獲得更好的效果.
[1] 祝章琛, 范辰五. 高速織機(jī)四桿打緯機(jī)構(gòu)的優(yōu)化平衡[J]. 中國(guó)紡織大學(xué)學(xué)報(bào), 1988,14(5): 5966.
[2] 張兵. 一種新的機(jī)電一體化機(jī)構(gòu)動(dòng)力學(xué)平衡方法:冗余伺服電機(jī)法的研究與應(yīng)用[D].上海:東華大學(xué)機(jī)械工程學(xué)院, 2011.
[3] SUN Z H, ZHANG B, HUANG J, et al. On a mechatronics approach to balancing of robotic mechanisms: Redundant servo motor [C]// Proceedings of International Conference on Advanced Mechatronics(ICAM2010), 2010,Osaka, Japan: 675680.
[4] SUN Z H, ZHANG B, CHENG L, et al. Application of the redundant servomotor approach to design of path generator with dynamic performance improvement[J]. Mechanism and Machine Theory, 2011, 46(11): 17841795.
[5] 韓建友. 高等機(jī)構(gòu)學(xué)[M]. 北京: 機(jī)械工業(yè)出版社, 2004.
[6] 劉家強(qiáng), 張兵, 孫志宏,等. 基于冗余伺服電機(jī)的平面四連桿機(jī)構(gòu)震動(dòng)平衡[J].東華大學(xué)學(xué)報(bào)(自然科學(xué)版), 2012, 38(5): 592596.
[7] 歐玉俊, 孫志宏, 章文俊. 基于冗余伺服電機(jī)法的彈性連桿機(jī)構(gòu)的平衡[J]. 機(jī)械科學(xué)與技術(shù), 2012,31(9): 14541457.
[8] 楊元福, 孫志宏, 章文俊. 基于冗余伺服電機(jī)法對(duì)含外負(fù)載的剛性連桿機(jī)構(gòu)的動(dòng)力學(xué)平衡研究[J].機(jī)械科學(xué)與技術(shù), 2014, 33(12): 17761780.
Dynamic Balancing Optimization of Rigid Beating-up Mechanism on the Water-Jet Loom Based on the Partial Redundant Servo Motor Method
MAOYing,SUNZhi-hong,JIANGChang-yun,XUYa-hong,RAHMANHabibur
(College of Mechanical Engineering, Donghua University, Shanghai 201620, China)
The dynamic balancing study of the beating-up mechanism has a significant meaning in solving the presence status that looms have large vibration and noise. In order to eliminate the shaking force and shaking moment produced by the inertia force of the beating-up mechanism of a loom, a new approach-partial redundant servo motor (PRSM) method, combined with the counter-weight approach, was applied to do the dynamic balancing optimization on beating-up mechanism. The results verify the validity of PRSM method and offer the reference for using it in other mechanisms.
beating-up mechanism; partial redundant servo motor(PRSM)method; dynamics; balancing
16710444 (2016)060889-05
20150924
毛 瑩(1992—),女,江西南昌人,碩士研究生,研究方向?yàn)闄C(jī)械設(shè)計(jì)及理論.E-mail:yingmying@126.com 孫志宏(聯(lián)系人),女,教授,E-mail:zhsun@dhu.edu.cn
TH 112.1
A
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
