某型監控系統故障診斷專家系統知識獲取和故障樹推理分析*
2017-01-11 03:34:40潘興隆劉海松
艦船電子工程 2016年12期
徐 宣 賀 國 潘興隆 劉海松
(1.海軍工程大學動力工程學院 武漢 430033)(2.海軍工程大學管理工程系 武漢 430033)(3.海軍駐溫州地區軍事代表室 舟山 316000)
某型監控系統故障診斷專家系統知識獲取和故障樹推理分析*
徐 宣1賀 國2潘興隆1劉海松3
(1.海軍工程大學動力工程學院 武漢 430033)(2.海軍工程大學管理工程系 武漢 430033)(3.海軍駐溫州地區軍事代表室 舟山 316000)
基于故障樹技術的專家系統適用于如某型船柴油機監控系統的復雜容錯系統故障診斷。知識的獲取和推理中的故障樹分析是專家系統關鍵部分。首先將監控系統各故障事件間邏輯關系用故障樹的形式聯系起來,然后轉化成二叉樹的形式存儲故障知識。對專家系統推理機中復雜故障樹用線性搜索方法模塊化并查找其靜態子樹和動態子樹。靜態子樹用二元決策圖進行分析,動態子樹用馬爾可夫模型進行分析。通過故障樹分類分析,得到準確全面的推理結果。
專家系統;故障診斷;二叉樹;二元決策圖;馬爾可夫鏈
(1. College of Power Engineering,Naval University of Engineering, Wuhan 430033)(2. Department of Management Science,Naval University of Engineering, Wuhan 430033)(3. Navy Representative Office in Wenzhou Area, Zhoushan 316000)
Class Number TP391
1 引言
某型船柴油機監控系統控制邏輯復雜,發生故障不易診斷和排除。專家系統是一種模擬專家決策分析的計算機系統,適用于該型監控系統的故障診斷。知識的獲取和故障推理一直是專家系統研發和應用的難題[1]。針對某型柴油機監控系統特點采用二叉故障樹的形式實現專家系統知識獲取。專家系統推理機一般采用故障樹分析法進行推理,傳統的故障樹分析法基于靜態邏輯,不適用于含冗余、容錯機制的故障系統[2]。而動態故障樹在靜態故障樹基礎上引入具有動態特性的新邏輯門類型如相關門、備件門等,引入新邏輯門的動態故障樹可使某型柴油機監控系統的故障樹分析更加全面,提高專家系統的效率和準確性。為此,采用基于動態故障樹的模塊化分析方法解決某型監控系統故障診斷專家系統推理中面臨的結果不準確和運算量過大 引發“組合爆炸”的問題。
2 故障樹的建立
故障樹分析法將系統中可能發生的重要故障事件作為故障樹頂事件,而后在故障樹中按某種方法尋找導致該故障發生的原因,直到溯至某種基本故障事件[3~5]。以某型船柴油機監控系統啟動異常為例,在詳細分析其工作原理基礎上,結和多年人工故障診斷經驗,構建含有動態故障子樹的系統故障樹,如圖1所示。
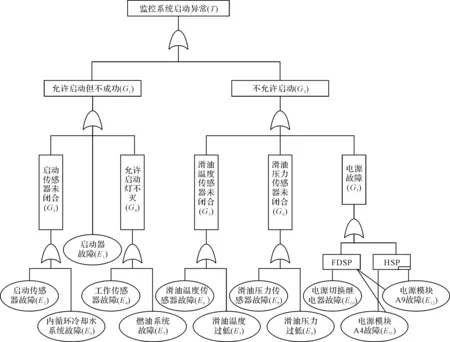
圖1 監控系統啟動異常故障樹
3 基于二叉樹的知識獲取
二叉樹是一種樹形結構,與普通樹形結構的區別為它的每個節點最多有兩個子樹且子樹左右次序不能顛倒。故障樹向二叉樹轉化的過程中,二叉樹的左子樹用于存放本級故障節點的下一級故障;右子樹用于存放本級故障節點的同級故障[1]。根據轉換規則可將圖1轉化為如圖2的二叉故障樹。

圖2 監控系統啟動異常二叉樹
其中故障樹電源故障邏輯較為復雜,暫作為一個整體故障事件G7進行存儲。二叉樹知識的存儲采用鏈式存儲方法,即用鏈表的形式表達節點之間的邏輯關系。鏈表中每個節點分別由三個域組成:數據域和左右指針域,左右指針分別給出該節點“左孩子”和“右孩子”所在鏈節點的存儲地址。其節點結構如圖3所示。

圖3 二叉鏈表節點結構
利用二叉樹實現知識獲取時,可直接在原樹的右子樹添加某故障節點的同級故障從而使得故障樹每級節點最多只有兩個子樹,解決了傳統故障樹節點子樹個數范圍不確定引起的計算機存儲困難。
該型二叉鏈表存儲結構在C語言下的編碼形式為:
#define datatype char //定義二叉樹節點數據類型為字符
typedef struct node //定義節點由數據域,左右指針域組成
{Datatype data;
struct node *lchild,*rchild;
}Bitree
4 推理中的故障樹分析
4.1 故障樹模塊化
推理機是專家系統另一關鍵部分,它的準確度和效率直接影響專家系統整體性能。故障樹分析法是推理機中常用的推理方法[6]。實際應用操作中,要分析的系統龐大,生成的故障樹相應也非常復雜,故障樹常用的分析法如定性分析和定量分析實現較為困難。故障樹的模塊化則是一種有效的故障樹簡化方法。
故障樹模塊化的主要工作是分辨和隔離出整個故障樹中的獨立子樹。獨立子樹僅含靜態邏輯門的稱靜態子樹,獨立子樹包含動態邏輯門的稱動態子樹[3]。通常情況下故障樹整體中只有很小一部分在本質上是動態的,所以動態子樹數量通常較少。
采用一種線性搜索的方法來快速查找靜態子樹和動態子樹。對故障樹進行兩次深度優先搜索,對第一次搜索中得到的故障樹底事件及中間事件分別設置M1、M2、M3用于標識第一次、第二次和最后一次檢測到某事件所用的步數。然后對故障樹進行二次搜索,對每個中間事件,計算與其相連的所有下層事件的M3最大值和M1最小值,分別用Max和Min表示。當滿足如下條件時,節點N是獨立子樹:與其相連的所有下層事件中,M3的最大值比節點N的M2值小;M1的最小值比節點N的M1值大[7~8]。對圖1所示故障樹進行第一次搜索可得表1。
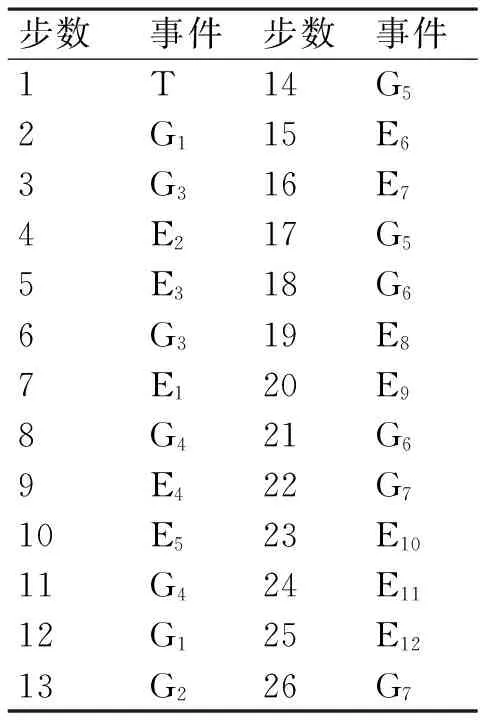
表1 監控系統啟動異常故障樹搜索結果
對故障樹各中間節點做第二次搜索,并比較標識值可得表2。
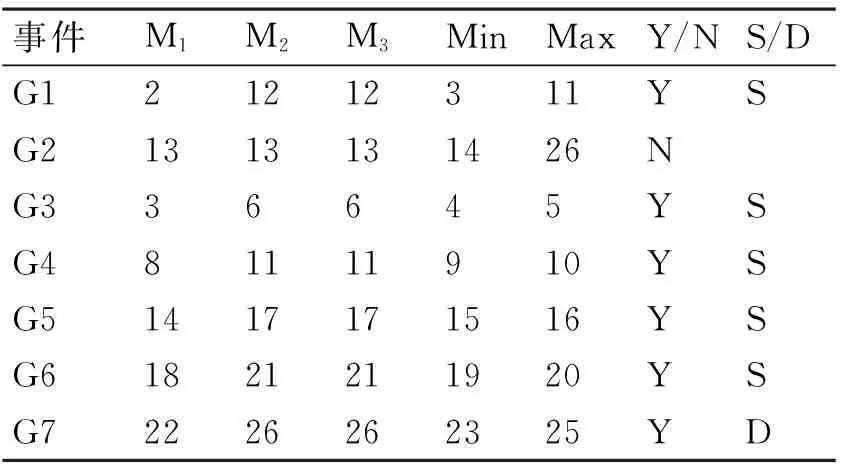
表2 動態故障樹遍歷結果
表中“Y/N”表示節點是否滿足獨立子樹條件,“S/D”表示滿足條件的獨立子樹為靜態還是動態子樹。由表可得G1、G3、G4、G5、G6為獨立靜態子樹,G7為獨立動態子樹。
4.2 基于BDD的靜態子樹分析
二元決策圖BDD(V,N)是一種特殊有根樹,其中V為節點集,N為指標集。節點集包括兩類節點[3]:
1) 有確定節點值value(v)∈{0,1}的葉節點;
2) 沒有確定節點值,但有相應指標值index(v)∈N的非葉節點。
對任意的BDD,可設:
V={v1,v2,…,vm},N={1,2,…,n}
給定一組布爾變量x1,x2,…,xn,根據節點指標和布爾變量的對應關系,將節點與布爾變量對應,即若
index(vi)=j∈N,i∈{1,2,…,m}
則vi對應的布爾變量為xj。這樣BDD就可與布爾函數f=f(x1,x2,…,xm)相對應。BDD中節點xi從本身向上回溯到根節點所經過的路徑,稱為
節點xi的回溯集,記作H(xi)。BDD是一種函數不交化的圖形表示[3]。將故障樹轉化為BDD,即可得到系統所有故障即可得到系統所有故障模式和故障的傳播途徑。BDD的中間節點表示系統故障的底事件,根節點到葉節點間的每一條路徑代表底事件發生與否的不交化組合,葉節點值為1的路徑表示系統故障。每一條葉節點為1的路徑中,所有發生的底事件的集合即為系統的割集,對這些割集進行最小化即得到系統的最小割集[8]。由函數的不交化性質可知,葉節點為1的所有回溯集發生概率之和即為靜態子樹頂事件的故障概率。對圖1所示的故障樹,靜態子樹G1,G3,G4,G5,G6對應的BDD如圖4所示。
由圖4可知,靜態子樹G1的割集為{G3},{E1},{G4};G3的割集為{E2},{E3};G4的割集為{E4},{E5};G5的割集為{E6},{E7};G6的割集為{E8},{E9}。
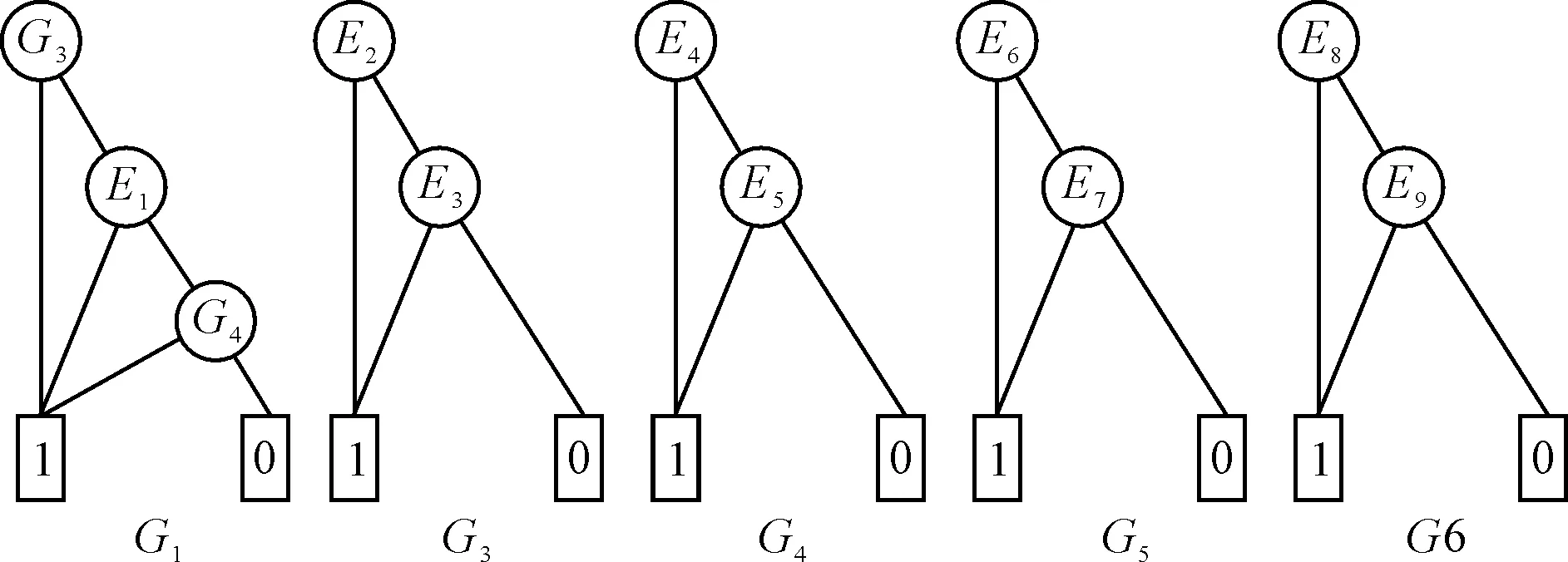
圖4 G1、G3、G4、G5、G6對應的BDD
根據以往人工診斷經驗數據各底事件故障概率[7]分別為:
P(E1)=0.02,P(E2)=0.015,P(E3)=0.02,
P(E4)=0.04,P(E5)=0.09,P(E6)=0.018,
P(E7)=0.03,P(E8)=0.05,P(E9)=0.045,
則由靜態子樹故障概率計算公式[2]可得各子樹故障概率為:
P(G1)=P(G3)+P(E1)*[1-P(G3)]+P(G4)*[1-P(E1)]*[1-P(G4)]=0.1082
P(G3)=P(E2)+P(E3)*[1-P(E2)]=0.0347
P(G4)=P(E4)+P(E5)*[1-P(E4)]=0.1264
P(G5)=P(E6)+P(E7)*[1-P(E6)]=0.0475
P(G6)=P(E8)+P(E9)*[1-P(E8)]=0.0928
由此可得:靜態子樹中G1,G4具有較高出現故障的概率,故障排除過程中應著重檢查。
4.3 基于馬爾可夫模型的動態子樹分析
基于馬爾可夫模型的動態子樹分析,首先需將獨立動態子樹轉化為相應的馬爾可夫鏈[9~11]。馬爾可夫鏈是系統狀態之間有可能轉移的一種圖形化表示,通過一種可視化工具來幫助理解馬爾可夫模型。狀態轉移圖可以將初始狀態、系統狀態、系統狀態間的轉移和相應的轉移率圖形化表示出來[8]。圖1中動態子樹G7含一個熱備件門和一個功能相關門,熱備件門是備件門的一種,表示系統中含有激活且隨時準備切換到工作狀態的備件,圖1中電源模塊A9作為A4的備件,保持27V電壓可隨時接入系統工作。當主電源模塊A4故障時,通過電源切換繼電器切換接入工作,A4和A9即構成了一個熱備件門。系統中某個部件故障可能會導致與其相關的其他部件發生故障或無法進入工作狀態的門稱為功能相關門,圖1中電源切換繼電器和電源模塊A4、A9即構成一組功能相關門。電源故障動態子樹向馬爾可夫鏈的轉移如圖5所示。
正常情況下,電源模塊A4故障時自動接入A9模塊繼續維持監控系統工作,則馬爾可夫鏈向下方向轉移;而當電源切換繼電器故障時,A4模塊出現故障時無法自動切換備用電源,從而導致監控系統故障,馬爾可夫鏈向上轉移。圓內三位數字依次表示底事件電源切換繼電器(E10)、電源模塊A4(E11)、電源模塊A9(E12)狀態,0表示正常,1表示故障。

圖5 G7狀態轉移圖

P(E10)=0.05,P(E11)=0.03,P(E12)=0.03
則由動態子樹故障概率計算公式[2]可得電源故障概率為:
=P(E10)*P(E11)+P(E11)*P(E12) =0.0024
對G7的分析可以看出電源故障概率較低,故障排除過程中應排在較后檢查。
5 結語
采用二叉故障樹的方法實現專家系統知識的獲取。首先構建某型柴油機監控系統故障樹,然后將其轉化為二叉樹的形式實現專家系統知識的獲取和存儲。分析表明,基于二叉樹的專家系統知識獲取結構簡單,便于存儲。創新性地將動態故障樹分析方法引用到某型監控系統故障診斷專家系統推理分析過程中,首先對系統故障樹進行模塊化處理得到靜態和動態子樹,將二元決策圖和馬爾可夫模型方法分別用于不同子樹的故障分析,在一定程度上降低了傳統故障樹分析方法求解的復雜度,提高了分析的準確性。
[1] 王學杰,賀國,陳連樹. 基于二叉樹的某型船柴油機控制系統故障診斷專家系統[J]. 中國艦船研究,2009,4(6):34-37.
[2] 季會媛. 動態故障樹分析方法研究[D]. 長沙:國防科學技術大學,2002.
[3] 李堂經,王新閣,楊哲. 動態故障樹的綜合分析方法[J]. 裝備制造技術,2009(8):22-24.
[4] 包勇,張德銀,莊緒巖. 基于動態故障樹技術的故障診斷專家系統[J]. 四川大學學報,2014,51(6):1211-1216.
[5] Anna Syberfeldt,Oscar Danielsson,Magnus Holm,et al. Dynamic Operator Instructions Based on Augmented Reality and Rule-based Expert Systems[J]. Procedia CIRP,2016,41(2):646-652.
[6] A.C.Cilliers. Expert Fault Detection and Diagnosis System on The Three Mile Island Accident Event Sequence[J]. Annals of Nuclear Energy,2013,62(4):326-334.
[7] 賀國,徐建卯,張文濤. 用故障樹分析法排除柴油機監控系統故障[J]. 海軍工程大學學報,2000(4):45-48.
[8] 劉文彬.基于模塊化思想的動態故障樹分析方法研究[D]. 南京:南京理工大學,2009.
[9] 郭偉偉.基于故障樹技術的遠程故障診斷專家系統的研究[D]. 西安:西北工業大學,2007.
[10] 殷海俊,黃惠寧. 艦船電子裝備的狀態監測與故障診斷[J]. 艦船電子工程,2015,36(1):144-146.
[11] O.Yevkin. An Efficient Approximate Markov Chain Method in Dynamic Fault Tree Analysis[J]. Qual.Reliab. Engng Int,2016,32(4):168-173.
Knowledge Acquisition and Reasoning Analysis of A Certain Type of Monitoring System Fault Diagnosis Expert System
XU Xuan1HE Guo2PAN Xinglong1LIU Haisong3
Fault diagnosis expert system(ES) based on fault tree technology is suitable for complex fault-tolerant system such as a certain type of ship monitoring system.Knowledge acquisition and fault tree analysis in inference engine are key parts in ES.Firstly, the logical relationship between types of ship monitoring system fault events with fault tree form in series are connected. Then in inference engine of the ES, a binary tree is used to store the fault knowledge. linear search method is used to find the static and dynamic sub-trees in a complex fault tree. Static sub-tree with binary decision diagrams and dynamic sub-tree are analyzed with Markov Model. accurate and comprehensive reasoning result are gotten by classified fault tree analysis.
expert system, fault diagnosis, binary tree, binary decision diagrams, Markov chain
2016年6月5日,
2016年7月17日
海軍裝備保障項目(編號:4255161523)資助。
徐宣,男,碩士研究生,研究方向:艦船動力裝置自動化及其仿真技術。賀國,男,教授,博士生導師,研究方向:艦船動力裝置技術保障。潘興隆,男,博士,講師,研究方向:機電一體化。劉海松,男,工程師,研究方向:裝備技術保障。
TP391
10.3969/j.issn.1672-9730.2016.12.030
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
