對海雷達目標識別中全極化HRRP的特征提取與選擇
2017-01-09 05:34:33范學滿胡生亮賀靜波
電子與信息學報 2016年12期
范學滿 胡生亮 賀靜波
?
對海雷達目標識別中全極化HRRP的特征提取與選擇
范學滿*胡生亮 賀靜波
(海軍工程大學電子工程學院 武漢 430033)
充分、有效地利用目標全極化HRRP的特征信息是提高對海雷達目標識別率的研究熱點之一。該文利用CST軟件仿真建立了7類海上目標在不同方位角下的全極化HRRP數據庫。在此基礎上,提取了4類共39個特征。提出一種基于歸一化互信息(NMI)并利用模擬退火(SA)算法進行優化的全局最優特征選擇算法,并命名為NMI-SA。基于HRRP數據集以及9個UCI數據集,利用-近鄰分類器將該算法與另外3種常用的特征選擇算法進行對比,結果表明新算法選擇的特征具有良好的可分性和較低的冗余度,最終用于分類時的正確率總體優于其余3種算法。最后,用該算法對全極化HRRP的39個特征進行重點分析,選擇出25個辨別力強、冗余度低的特征。
全極化HRRP;特征提取;特征選擇;互信息;模擬退火
1 引言
研究如何從眾多艦艇以及角反射體組成的多目標群中識別出目標艦艇,已成為對海雷達的一項重要課題。全極化HRRP能夠提供比單極化HRRP更為豐富的目標結構信息,隨著全極化HRRP技術在對海雷達上的逐步應用,基于全極化HRRP的特征提取與目標識別技術引起廣泛關注[1]。文獻[2,3]將4種極化方式下的HRRP看作4個獨立通道分別進行特征提取,均沒有利用極化特征[4]。文獻[5-8]利用極化分解理論提取///、極化不變量、相似性參數等極化特征進行分類識別,取得了較好的分類效果。本文綜合上述單通道HRRP特征和極化特征兩類特征,從物理結構、散射隨機性、散射矩陣結構相似性、Mueller矩陣相似性4個方面提取了共計39個特征,旨在充分利用全極化HRRP各類信息,更加全面地刻畫目標特性。
理論上講,用于分類的特征數越多,各類目標的可分性越強。然而實際并非總是如此,因為并不是所有特征對分類都起積極作用,同時維數過高可能引起維數災難[9]。本文提取的39個特征的辨別力不盡相同,因此需要進行特征選擇,剔除與分類任務不相關的特征,從而提高泛化能力[10,11]。由于互信息(Mutual Information, MI)能夠有效反映變量之間的非線性關系且具有十分成熟的理論基礎,因此成為特征選擇算法中用于評估特征重要性的最常用準則之一。文獻[12]中總結了近20年來基于MI的特征選擇算法的研究進展,列舉了17種基于MI的特征選擇算法,這些算法都是基于貪婪策略遞增地進行特征選擇,即每步只選擇一個使分類相關性最大、特征子集冗余度最小的特征,已經選擇的特征不能被剔除,直到所選特征數目滿足要求為止,顯然這些基于MI的特征選擇算法都是次優的。
針對上述問題本文利用歸一化互信息(Normalized Mutual Information, NMI)代替互信息進行特征間冗余度以及特征(集)與分類任務間相關性的度量,并利用模擬退火算法(Simulated Annealing, SA)[13]進行優化搜索,從而較為高效地選擇出全局最優的特征子集。
2 全極化HRRP特征提取
目前,對海雷達的分類識別重點關注艦艇和角反射體目標,本文在角反射體方面選擇由20個三面角反射體組成的異型角反射體(三面角反射體的垂直邊長為1.52 m),取6個異型角反射體兩兩間隔30 m構成角反射體陣列,如圖1所示。在艦艇方面選擇主要結構參數如表1所示的6艘艦艇。
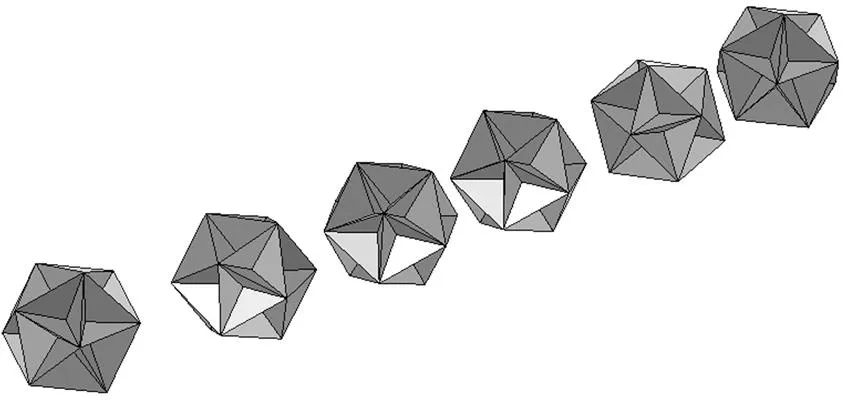
圖1 異型角反射體陣列結構示意圖
表1 各艦艇的主要結構參數
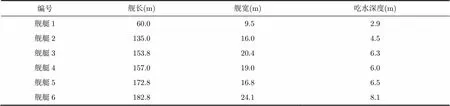
編號艦長(m)艦寬(m)吃水深度(m) 艦艇1 60.0 9.52.9 艦艇2135.016.04.5 艦艇3153.820.46.3 艦艇4157.019.06.0 艦艇5172.816.86.5 艦艇6182.824.18.1
2.1 全極化HRRP數據庫建立
由于上述艦艇目標多為非合作目標,因此很難通過實測建立目標的全極化HRRP數據庫。本文利用SolidWorks 3維建模軟件建立上述7類目標的1:1模型,然后導入CST電磁仿真軟件進行仿真計算4種極化方式(HH, HV, VH, VV)下的全極化HRRP, H, V分別表示水平和垂直極化。對于對海雷達而言,上述7類目標在電磁仿真計算時都屬于電極大目標,因此仿真效率較低。考慮到目標的對稱性,同時為兼顧仿真計算效率,本文選取艦首左舷一側這3個角域進行分析。
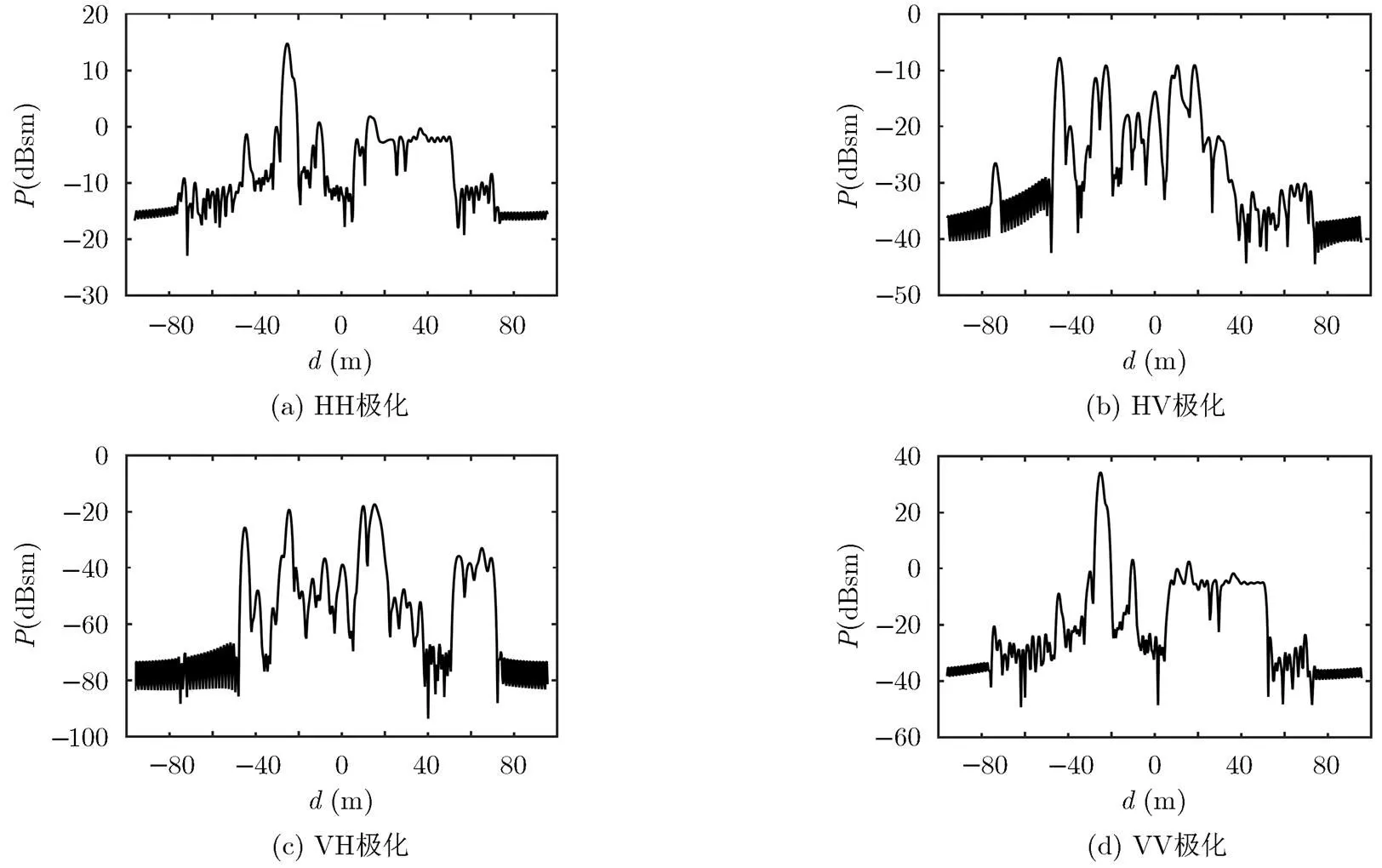
圖2 方位角時艦艇3的全極化HRRP
可見不同極化方式下的HRRP具有較大差異,尤其是同極化HRRP與交叉極化HRRP之間在波形和幅值上差異更大,說明全極化HRRP中包含更全面的目標結構信息,對全極化HRRP進行多特征提取可以提高對海雷達的目標識別性能。由于極化信息的處理過程都是建立在散射矩陣對稱的基礎之上,因此本文采用Cameron平均修正法對交叉極化通道的HRRP進行互易性修正[6],即取兩者的平均值作為交叉極化通道的HRRP,修正后的全極化HRRP記為HRRPHH, HRRPHV, HRRPVH, HRRPVV,且有HRRPHV=HRRPVH。
2.2 全極化HRRP特征提取
利用修正后的全極化HRRP提取以下4類特征:(1)反映目標物理結構的平移不變特征,共21個;(2)反映目標HRRP散射隨機性的熵特征,共4個;(3)反映目標與標準體散射矩陣的相似性特征,共7個;(4)反映目標與標準體散射能量的相似性特征,共7個。
2.2.1 目標物理結構的平移不變特征 為了充分利用包含在HRRP中的目標精細結構信息,從每個HRRP序列中提取7個與目標物理結構密相關的特征,即徑向長度,散射重心,強散射中心的數目NP,兩個最強散射中心之間的距離DPK,最強散射中心距目標最前端的距離DEP,強散射中心的幅值分布熵EA,強散射中心的位置分布熵EP。其中,前5個特征的提取可參見文獻[3],下面主要介紹特征EA, EP的提取。
將從HRRP序列中提取的NP個強散射中心,按幅值遞減順序排列,記為。其中,表示HRRP序列中第強的散射中心的幅值,下標m代表該散射中心對應的單元序號。令,分別為HRPP序列中大于閾值的第1個和最后一個點所對應的序號,則強散射中心的幅值分布熵EA可定義為
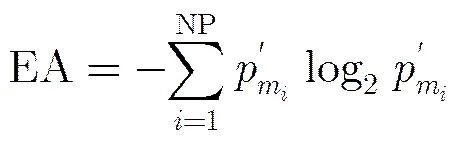
EA反映了目標強散射中心幅值大小的離散程度,EA越大說明幅值之間的差異越小;反之差異越大。
強散射中心的位置分布熵EP定義為
EP反映了目標強散射中心在徑向尺度上位置分布的離散程度,EP越大強散射中心在徑向尺度上均勻分布的可能性越大;反之,則說明強散射中心在徑向尺度上的位置分布比較集中。
修正后每類目標在每個方位角對應3種不同收發極化的HRRP,每種極化方式對應7個平移不變特征,因此,每類目標在每個方位角總共對應21個反映目標物理結構的平移不變特征。
2.2.2 反映目標HRRP散射隨機性的熵特征 2008年,文獻[5]將用于全極化SAR分析中的散射熵、平均散射角和反熵引入到基于全極化HRRP的目標識別領域。本文參考文獻[6]中的方法,提取反映目標HRRP散射隨機性的4個熵特征,即,,和參數。
值在[0,1]之間,描述了目標散射的隨機性,越大去極化程度越強;值在之間,反映了目標的主要散射機理,越大目標散射的各向異性越強;反映了次散射分量與最弱散射分量的能量比值;反映了主散射分量與次散射分量的能量比值。
2.2.3 反映目標與標準體散射矩陣及散射能量的相似性特征 艦船和角反射體等目標是由多個獨立的子散射體所構成的復雜目標,目標整體的散射特性是由各子散射體的相互作用共同決定,研究目標與標準散射體的相似性對于目標間的彼此區分有一定價值。文獻[8]從散射矩陣和散射能量兩方面,基于全極化HRRP定義了目標與6種標準體(即平板、二面角、水平偶極子、圓柱體、左螺旋體和右螺旋體)之間的相似性參數,分別記為和。考慮到艦船結構的特殊性,本文引入傾斜的二面角(極化散射矩陣7=[0,1;1,0]),按照文獻[8]中方法提取目標與傾斜的二面角的散射矩陣及散射能量的相似性特征,分別記為和。
綜上所述,每個目標在任意方位角可以提取4類總共39個特征,本文仿真計算了903個方位角,因此,經特征提取后每個目標對應一個39×903的數據矩陣。雖然特征越多,刻畫目標越詳實,但并不是每個特征對分類識別都有貢獻,相反,大量冗余特征會引發“維數災難”且會增加過擬合的風險,因此有必要進行特征選擇,只保留對分類識別貢獻較大的特征。
3 全極化HRRP特征選擇
基于MI的特征選擇算法利用互信息來定量分析特征間或特征與類標簽向量間的線性或非線性關系,離散變量與的互信息可以表示為

MI也可以用熵來表示,即
式中,()(()),()分別為熵和條件熵。
(5)
由式(4)和式(5)可知互信息還可以理解為:已知變量的情況下,變量的不確定度的減少量。
3.1 最小冗余最大相關特征選擇
分析文獻[12]中列舉的17種基于MI的特征選擇算法,其中絕大多數算法都是圍繞冗余度和相關性展開研究,最為成功的則是最小冗余最大相關算法(Minimum Redundancy Maximum Relevance, MRMR)。特征集由個特征組成,表示類標簽變量,特征X與的相關性用MI表示為

(7)
MRMR是一次只選擇一個特征的貪婪算法,第次選擇的特征需要滿足式(8)的目標函數最大化要求,即

廣義MRMR算法可以歸納為
(9)
mRMR[15]:。
NMIFS-1[16]:。
3.2 NMI-SA算法
NMI-SA算法同樣以最小冗余最大相關準則為出發點,與傳統MRMR算法不同的是NMI-SA可以評價任意特征子集的優良程度,即利用多個特征與類標簽向量的歸一化聯合互信息來衡量特征子集的相關性,并利用特征間的平均歸一化互信息來衡量特征子集的冗余度,最后利用SA算法搜索全局最優的特征子集。
3.2.1 基于歸一化互信息的適應度 為了尋找合適的互信息歸一化方法,首先需要分析互信息的上界,由于連續變量可以量化為離散變量,因此選取兩個離散隨機變量和進行分析。由式(4)可知

將詹森不等式用于式(5)中的熵定義可得
(11)
綜合式(10)和式(11)可得

為了保證每個特征的取值個數相同,用同一量化水平對所有特征進行量化處理,量化過程中逐一增加量化位數,直至所有樣本的最大量化誤差小于預設的期望量化誤差。本文取,因為實驗發現更小的對提高分類精度幾乎沒有貢獻,反而會帶來額外的計算負擔。量化處理后,對任意特征,因此,顯然log2是與特征無關的互信息上界。進而將特征之間的歸一化互信息定義為
(13)
顯然,式(13)的取值范圍為[0,1]。
(15)
另外,特征子集的冗余度可用特征間的平均歸一化互信息來表征,即

由式(15)和式(16)可知,Rel()與Red()取值范圍均為[0,1],可定義如下特征子集適應度函數:
(17)
利用模擬退火算法進行全局尋優等價于搜索使()取最大值的特征子集。
為了便于后續對比研究,在此基于歸一化互信息定義如下特征選擇算法,即

3.2.2 NMI-SA算法實現 SA算法包括初溫設定、Metropoils抽樣和控制參數的下降3個過程。能量就是代價函數,要得到的最優解就是能量最低態,即使代價函數取最小值的解。Metropoils準則以一定的概率接受惡化解,從而避免陷入局部最優解[17]。取代價函數, NMI-SA的偽代碼如表2所示,本文取。

表2 NMI-SA的偽代碼
4 實驗
實驗環境為Core i5處理器、主頻3.3 GHz、內存4 GB,選用MATLAB R2016a,選擇PRtools 5.0中的-近鄰分類器(-nn,取3)進行分類識別。分類精度用5×2交叉校驗的平均值來表征,即重復進行5次2重交叉校驗實驗,每次實驗時將樣本集隨機分為等大的兩部分,輪流充當訓練集和測試集。首先進行實驗對比NMI-SA與mRMR, NMIFS-1, NMIFS-2的特征選擇性能;然后,利用性能最優的特征選擇算法重點分析全極化HRRP的39個特征,旨在尋找一個使適應度()和分類正確率盡可能高的特征子集。
4.1 性能對比實驗
設計實驗對比NMI-SA與mRMR, NMIFS-1, NMIFS-2的特征選擇性能,為了保證試驗的客觀性,除了以目標全極化HRRP特征集作為實驗數據集外,還從UCI公共數據庫中選取了9個數據集,分別為Hill Valley, Ionosphere, Isolet, Libras Movement, Landsat Satellite, Letter, Sonar, Spambase, Vehicle。上述數據集的樣本數、類別數、特征數或特征類型等信息參見http://archive.ics. cui.edu/ml/datasets.html。
4種特征選擇算法在不同數據集上選擇不同尺寸的特征子集,利用-nn進行分類后的正確率以及各算法的排名如表3所示(平局時用取名次的均值,例如出現并列第3時,排名記為3.5)。另外,在數據集名稱旁邊還給出了利用全部特征進行分類時的正確率作為參考。表3中通過加黑突出顯示性能最優的算法。
4種算法在各數據集上的平均排名如圖3所示,可見NMI-SA的排名比較靠前,整體上優于其余3種算法。為得到更具統計意義的結論進行Friedman檢驗。Friedman檢驗對比各種算法的平均排名,即

圖3 算法在各數據集上的平均排名
表3 各特征選擇算法的分類正確率及排名表
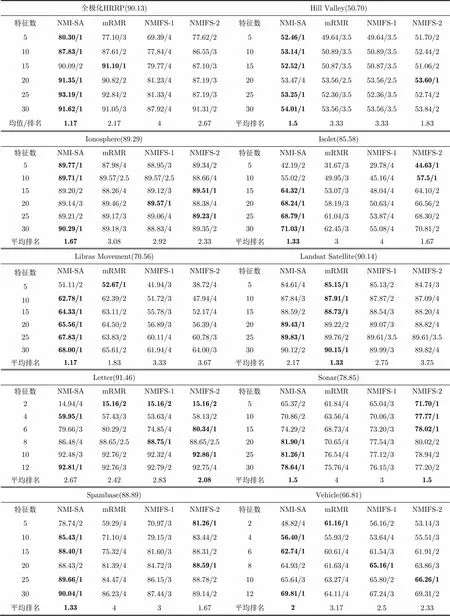
全極化HRRP(90.13)Hill Valley(50.70) 特征數NMI-SAmRMRNMIFS-1NMIFS-2特征數NMI-SAmRMRNMIFS-1NMIFS-2 580.30/177.10/369.39/477.62/2552.46/149.64/3.549.64/3.551.70/2 1087.83/187.61/277.84/486.55/31053.14/150.89/3.550.89/3.552.44/2 1590.09/291.10/179.77/487.10/31552.52/150.87/3.550.87/3.551.06/2 2091.35/190.82/281.23/487.19/32053.47/453.56/2.553.56/2.553.60/1 2593.19/192.84/281.33/487.19/32553.25/152.36/3.552.36/3.552.74/2 3091.62/191.05/387.92/491.31/23054.01/153.56/3.553.56/3.553.84/2 均值/排名1.172.1742.67平均排名1.53.333.331.83 Ionosphere(89.29)Isolet(85.58) 特征數NMI-SAmRMRNMIFS-1NMIFS-2特征數NMI-SAmRMRNMIFS-1NMIFS-2 589.77/187.98/488.95/389.34/2542.19/231.67/329.78/444.63/1 1089.71/189.57/2.589.57/2.588.66/41055.02/249.95/345.16/457.5/1 1589.20/288.26/489.12/389.51/11564.32/153.07/348.04/464.10/2 2089.14/389.46/289.57/188.38/42068.24/158.19/350.63/466.56/2 2589.21/289.17/389.06/489.23/12568.79/161.04/353.87/468.30/2 3090.29/189.18/388.83/489.35/23071.03/162.45/355.08/470.81/2 平均排名1.673.082.922.33平均排名1.33341.67 Libras Movement(70.56)Landsat Satellite(90.14) 特征數NMI-SAmRMRNMIFS-1NMIFS-2特征數NMI-SAmRMRNMIFS-1NMIFS-2 551.11/252.67/141.94/338.72/4584.61/485.15/185.13/284.74/3 1062.78/162.39/251.72/347.94/41087.84/387.91/187.87/287.09/4 1564.33/163.11/255.78/352.17/41588.59/288.73/188.54/388.20/4 2065.56/164.50/256.89/356.39/42089.43/189.22/289.07/388.82/4 2567.83/163.83/260.11/460.78/32589.83/189.76/289.61/3.589.61/3.5 3068.00/165.61/261.94/464.00/33090.12/290.15/189.99/389.82/4 平均排名1.171.833.333.67平均排名2.171.332.753.75 Letter(91.46)Sonar(78.85) 特征數NMI-SAmRMRNMIFS-1NMIFS-2特征數NMI-SAmRMRNMIFS-1NMIFS-2 214.94/415.16/215.16/215.16/2565.37/261.84/465.04/371.70/1 459.95/157.43/353.63/458.13/21070.86/263.56/470.06/377.77/1 679.66/380.29/274.85/480.34/11574.29/268.73/473.20/378.02/1 886.48/488.65/2.588.75/188.65/2.52081.90/170.65/477.54/380.02/2 1092.48/392.76/292.32/492.86/12581.26/176.54/477.12/378.94/2 1292.81/192.76/392.79/292.75/43078.64/175.76/476.15/377.20/2 平均排名2.672.422.832.08平均排名1.5431.5 Spambase(88.89)Vehicle(66.81) 特征數NMI-SAmRMRNMIFS-1NMIFS-2特征數NMI-SAmRMRNMIFS-1NMIFS-2 578.74/259.29/470.97/381.26/1248.82/461.16/156.16/253.14/3 1085.43/171.10/479.15/383.44/2456.40/155.93/253.64/455.51/3 1588.40/175.32/481.60/388.31/2662.74/160.61/461.54/361.91/2 2088.43/281.39/484.72/388.59/1864.93/261.63/465.16/163.86/3 2589.66/184.47/486.15/388.78/21065.64/363.27/465.80/266.26/1 3090.04/186.23/487.44/389.14/21269.81/164.11/467.24/369.31/2 平均排名1.33431.67平均排名23.172.52.33
(20)
4.2 全極化HRRP特征選擇
4.1節驗證了NMI-SA算法整體優于另外3種算法,本節利用NMI-SA算法從全極化HRRP的39個特征中挑選出辨別力強、冗余度低的特征子集。本文仿真建立了方位角為這3個角域的HRRP全極化特征數據庫,在特征選擇時分別對這3個角域以及3個角域構成的整體進行研究。特征子集的尺寸由1增加到39(步長為1),利用NMI-SA算法選擇出不同尺寸下的最優特征子集,利用-nn分類器輸出的不同特征集尺寸下的分類正確率如圖5所示。

圖4 Bonferroni-Dunn檢驗結果
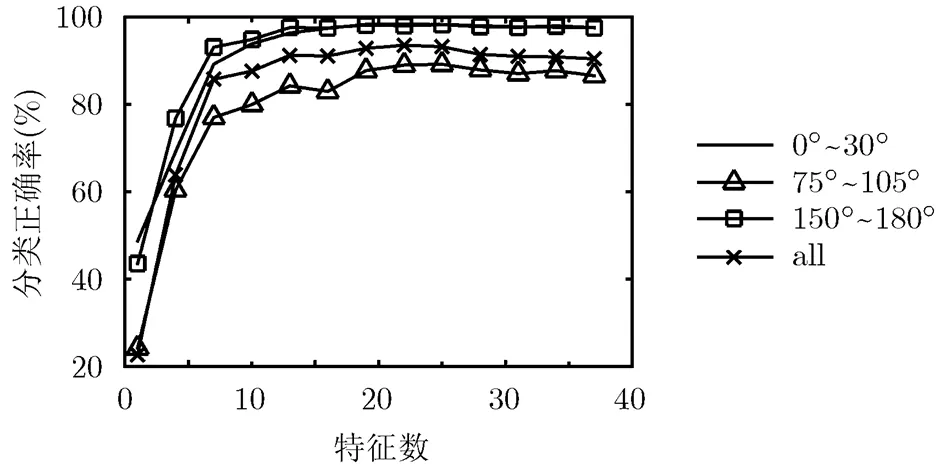
圖5 不同特征集尺寸下的分類正確率
由圖5可見,對所有角域當特征子集的特征數達到25之后,分類正確率不再隨特征數的增加而提高,甚至還會出現下降,從而確定最優特征子集的尺寸為25。這一現象驗證了特征并不是越多越好,必須通過特征選擇去除冗余特征,提高特征集的泛化能力。另外,考慮到HRRP具有方位敏感性,很難保證提取的所有特征對方位均不敏感,因此有必要分別研究不同HRRP角域支撐區下的最優特征子集,基于不同角域支撐區利用NMI-SA算法確定的最優特征子集如表4所示,表中標記a~d分別表示基于角域和上述所有角域所選中的特征。
由表4可知,基于不同角域所選的最優特征子集并不相同,尤其是對應的最優特征子集與對應的特征子集差別較大(分別有8個、10個不同特征),而與對應的最優特征子集差別較小(只有4個不同特征)。這說明不同角域支撐區對應不同的最優特征子集,由于實際應用中無法確定雷達與海上目標的相對態勢,為了盡可能松弛方位敏感性,應選取盡可能大的角域進行特征子集的優選。為此,本文以3個角域構成的全角域對應的最優特征子集作為最終結果,該子集中4類特征分別占16個,3個,4個和2個,說明第1類特征辨別力最強;另外,在第3和第4類特征中目標與平板、二面角、圓柱體和傾斜的二面角的結構或散射能量相似性參數作用比較突出。
表4 基于不同角域確定的最優特征子集表
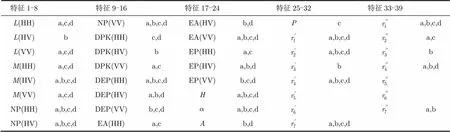
特征1-8特征9-16特征17-24特征25-32特征33-39 L(HH)a,c,dNP(VV)a,b,c,dEA(HV)b,dPca,b,c,d L(HV)bDPK(HH)c,dEA(VV)a,b,c,da,b,c,da,c L(VV)a,c,dDPK(HV)bEP(HH)a,ca,b,c,db M(HH)a,c,dDPK(VV)a,cEP(HV)a,b,dba,b,d M(HV)a,b,c,dDEP(HH)a,b,c,dEP(VV)b,c,da,b,c,d M(VV)a,c,dDEP(HV)a,b,dHa,b,c,d NP(HH)a,b,c,dDEP(VV)b,c,da,b,c,da,b NP(HV)a,b,c,dEA(HH)a,cAb,da,b,c,d
5 結束語
利用CST軟件仿真建立了7類海上目標的在不同方位角下的全極化HRRP數據庫;在此基礎上,提取了4類共39個特征。為了從根本上解決現有基于互信息的特征選擇算法的次優性以及在平衡因子選擇方面的難題,本文提出一種基于歸一化互信息并利用模擬退火算法進行優化的全局最優特征選擇算法—NMI-SA。基于HRRP數據集以及9個UCI數據集,并利用-近鄰分類器進行對比實驗,驗證了NMI-SA算法的可行性和優越性。利用NMI-SA算法對全極化HRRP的39個特征進行重點分析,根據分類識別率的變化規律確定特征子集的最優尺寸為25;分析了NMI-SA算法的方位敏感性,為了盡可能松弛方位敏感性,基于3個角域構成的全角域優選出一個尺寸為25的最優特征子集。本文只研究了模擬退火與歸一化互信息的結合,后續將在此基礎上研究使用不同搜索算法對特征選擇性能的影響。
參考文獻
[1] 馮博, 陳渤, 王鵬輝, 等. 利用穩健字典學習的雷達高分辨距離像目標識別算法[J]. 電子與信息學報, 2015, 37(6): 1457-1462. doi: 10.11999/JEIT141227.
FENG Bo, CHEN Bo, WANG Penghui,. Radar high resolution range profile target recognition algorithm via stable dictionary learning[J].&, 2015, 37(6): 1457-1462. doi: 10. 11999/JEIT141227.
[2] 郭尊華, 李達, 張伯彥. 雷達高距離分辨率一維像目標識別[J]. 系統工程與電子技術, 2013, 35(1): 53-60. doi: 10.3969/j.issn. 1001-506X.2013.01.09.
GUO Zunhua, LI Da, and ZHANG Boyan. Survey of radar target recognition using one-dimensional high range resolution profiles[J]., 2013, 35(1): 53-60. doi: 10.3969/j.issn.1001-506X.2013.01.09.
[3] PICHER C and KHOTANZAD A. Nonlinear classifier combination for a maritime target recognition task[C]. Proceedings of the IEEE Radar Conference, Pasadena, 2009: 873-877. doi: 10.1109/RADAR.2009.4976923.
[4] 劉盛啟, 占榮輝, 翟慶林, 等. 基于聯合稀疏性的多視全極化HRRP目標識別方法[J]. 電子與信息學報, 2016, 38(7): 1724-1730. doi: 10.11999/JEIT151019.
LIU Shengqi, ZHAN Ronghui, ZHAI Qinglin,. Multi- view polarization HRRP target recognition based on joint sparsity[J].&, 2016, 38(7): 1724-1730. doi: 10.11999/JEIT151019.
[5] BERIZZI F, MARTORELLA M, CAPRIA A,. H/polarimetric features for man-made target classification[C]. Proceedings of the IEEE Radar Conference, Rome, 2008: 1-6. doi: 10.1109/RADAR.2008.4721003.
[6] 楊磊, 王曉丹, 張玉璽, 等. 基于多極化特征提取和SVM的目標識別方法[J]. 現代防御技術, 2012, 40(5): 150-155. doi: 10.3969/j.issn.1009-086x.2012.05.029.
YANG Lei, Wang Xiaodan, ZHANG Yuxi,. Radar target recognition approach based on multi polarization multi target feature extraction and SVM[J]., 2012, 40(5): 150-155. doi: 10.3969/j.issn.1009-086x.2012.05. 029.
[7] 雷蕾, 王曉丹, 邢雅瓊, 等. 結合SVM和DS證據理論的多極化HRRP分類研究[J]. 控制與決策, 2013, 28(6): 861-866. doi: 10.13195/j.cd.2013.06.63.leil.011.
LEI Lei, WANG Xiaodan, XING Yaqiong,. Multi- polarized HRRP classification by SVM and DS evidence theory[J]., 2013, 28(6): 861-866. doi: 10.13195/j.cd.2013.06.63.leil.011.
[8] 郭雷. 寬帶雷達目標極化特征提取與核方法識別研究[D]. [博士論文], 國防科學技術大學, 2009: 15-49.
GUO Lei. Wideband radar target polarimetric feature extraction and recognition method based on kernel method [D]. [Ph.D. dissertation], National University of Defense Technology, 2009: 15-49.
[9] LIU H, SUN J, LIU L,. Feature selection with dynamic mutual information[J]., 2009, 42(7): 1330-1339. doi: 10.1016/j.patcog.2008.10.028.
[10] UNLER A, MURAT A, and CHINNAM R B. mr 2 PSO : a maximum relevance minimum redundancy feature selection method based on swarm intelligence for support vector machine classification[J]., 2011, 181(20): 4625-4641. doi: 10.1016/j.ins.2010.05.037.
[11] GARCIA M, GOMEZ F, MELIAN B,. High-dimensional feature selection via feature grouping: a variable neighborhood search approach[J]., 2016, 326(C): 102-118. doi: 10.1016/j.ins.2015.07.041.
[12] BROWN G, POCOCK A, ZHAO M J,. Conditional likelihood maximization: a unifying framework for information theoretic feature selection[J]., 2012, 13(1): 27-66.
[13] LYSIAK R, KURZYNSKI M, and WOLOSZYNSKI T. Optimal selection of ensemble classifiers using measures of competence and diversity of base classifiers[J]., 2014, 126(1): 29-35. doi: 10.1016/j.neucom. 2013.01.052.
[14] KWAK N and CHOI C H. Input feature selection for classification problems[J]., 2002, 13(1): 143-159. doi:10.1109/72.977291.
[15] PENG H, LONG F, and DING C. Feature selection based on mutual information: criteria of max-dependency, max- relevance, and min-redundancy[J].&, 2005, 27(8): 1226-1238. doi: 10.1109/TPAMI.2005.159.
[16] ESTEVEZ P A, TESMER M, PEREZ C A,. Normalized mutual information feature selection[J]., 2009, 20(2): 189-201. doi: 10.1109/TNN. 2008.2005601.
[17] ISAKOV S V, ZINTCHENKO I N, RONNOW T F,. Optimised simulated annealing for icing spin glasses[J]., 2015, 192: 265-271. doi: 10.1016/j.cpc.2015.02.015.
范學滿: 男,1989年生,博士生,研究方向為精確制導與對抗.
胡生亮: 男,1974年生,教授,研究方向為無源對抗.
賀靜波: 男,1979年生,講師,研究方向為隨機微分理論及應用.
Feature Extraction and Selection of Full Polarization HRRP in Target Recognition Process of Maritime Surveillance Radar
FAN Xueman HU Shengliang HE Jingbo
(,,430033,)
Making full and effective use of target polarization information from High Resolution Range Profile (HRRP) is a hot issue for improving the recognition performance of maritime surveillance radar. A HRRP database with seven maritime targets classes from various aspect angles is established, on which thirty-nine features from four categories are defined. A novel feature selection method based on the Normalized Mutual Information (NMI) and Simulated Annealing (SA) algorithm is presented, named as NMI-SA. The effectiveness of the NMI-SA is proved by comparison with three other methods using HRRP dataset and eight from UCI machine learning repository. Finally, the NMI-SA is applied to the HRRP dataset to find twenty-five high discriminant and low redundancy features.
Fully polarized HRRP; Feature extraction; Feature selection; Mutual information; Simulated annealing
TN959.72
A
1009-5896(2016)12-3261-08
10.11999/JEIT160722
2016-07-07;改回日期:2016-11-01;
2016-12-02
范學滿 oucfanxm@163.com
國家自然科學基金(61401493),國家部委基金(9140A01010415JB11002)
The National Natural Science Foundation of China (61401493), The National Ministries Foundation of China (9140A01010415JB11002)
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
