高速酒精檢測機器人方案設計與仿真
2017-01-07 02:59:40謝超明
邢臺職業技術學院學報 2016年5期
謝超明
?
高速酒精檢測機器人方案設計與仿真
謝超明
(湖北職業技術學院 機電工程學院,湖北 孝感 432000)
本方案創新的提出利用ABB工業機器人替代警察在高速收費站入口執行酒精檢測,檢測合格后機器人將自動發卡放行;若不合格,則屏幕顯示報警。通過仿真表明機器人能完成酒精檢測和自動發卡功能,并能有效的分辨酒后駕車人員,對維護安全出行有重要意義。
工業機器人;酒精檢測;仿真
2008年世界衛生組織的事故調查顯示,大約50-60%的交通事故與酒后駕駛有關,酒后駕駛已經被列為車禍致死的主要原因。中國每年由于酒后駕車引發的交通事故達數萬起;而造成死亡的事故中50%以上都與酒后駕車有關,酒后駕車的危害觸目驚心,已經成為交通事故的第一大“殺手”,而一旦這些飲酒者駕車駛入高速,帶來的后果將更加不堪設想。
工業機器人是集機械、電子、傳感器、控制等技術于一體的高端智能裝備,在工業上主要應用于焊接、搬運、涂膠、壓鑄、裝配等領域[1]。為使工業機器人更好的服務于生產生活,本方案創新的提出利用ABB工業機器人替代警察在高速收費站入口執行酒精檢測,檢測合格后機器人將自動發卡放行;若不合格,則屏幕顯示報警。通過嚴格篩查,嚴厲打擊酒后駕駛行為。
一、方案來源
目前酒后駕駛主要有兩種檢測方法:
(1)呼氣酒精含量檢測。
(2)抽取血液樣本進行酒精含量的檢測。
由于警力有限,目前酒精檢測時主要是由執勤交警在相關路段設卡抽檢,這樣不僅容易造成交通堵塞,而且抽檢樣本少,效率低,會產生不少“漏網之魚”,而這些酒駕者上路會對自己和他人的生命財產安全構成嚴重威脅。
另外,目前駕駛員進入高速收費站時會經過自動發卡通道,駕駛員需要駐車然后將身體伸出窗外取卡,然而由于駕駛員操作水平等原因,導致駐車取卡時往往出現手臂夠不著、拿不穩等取卡不暢的現象,甚至有時候需要駕駛員下車取卡,造成諸多不便。
高速酒精檢測機器人將改善以上不足,它對每一位通過高速入口的駕駛員執行最全面的酒精檢測,如果檢查合格,機器人將卡自動送到駕駛員手上,放行通過;如果不合格,會提示報警并由檢查人員處理,為安全出行提供更多保障。
二、方案設計
1.整體方案設計
本方案利用ABB工業機器人IRB1410完成酒精檢測和取卡發放兩個動作。當車輛進入高速入口時,由攝像頭采集車輛外形信息傳給機器人并提醒駕駛員按照語音提示操作,車輛在發卡處減速停止時,機器人將酒精測試儀送入車內采集酒精濃度信息,酒精檢測儀采用酒精分子傳感器固定在機器人的末端操作器上,每次檢測完成無需拆除,能夠快速分析并且信號可以自動復位,檢測完成后,酒精濃度信息顯示在發卡機上面的顯示屏幕上。如果合格,機器人將自動取卡并發放給駕駛員,避免駕駛員將身體伸出窗外取卡的不便;如果不合格,蜂鳴器將提示報警,由工作人員過來處理。其工作流程圖如圖1所示。
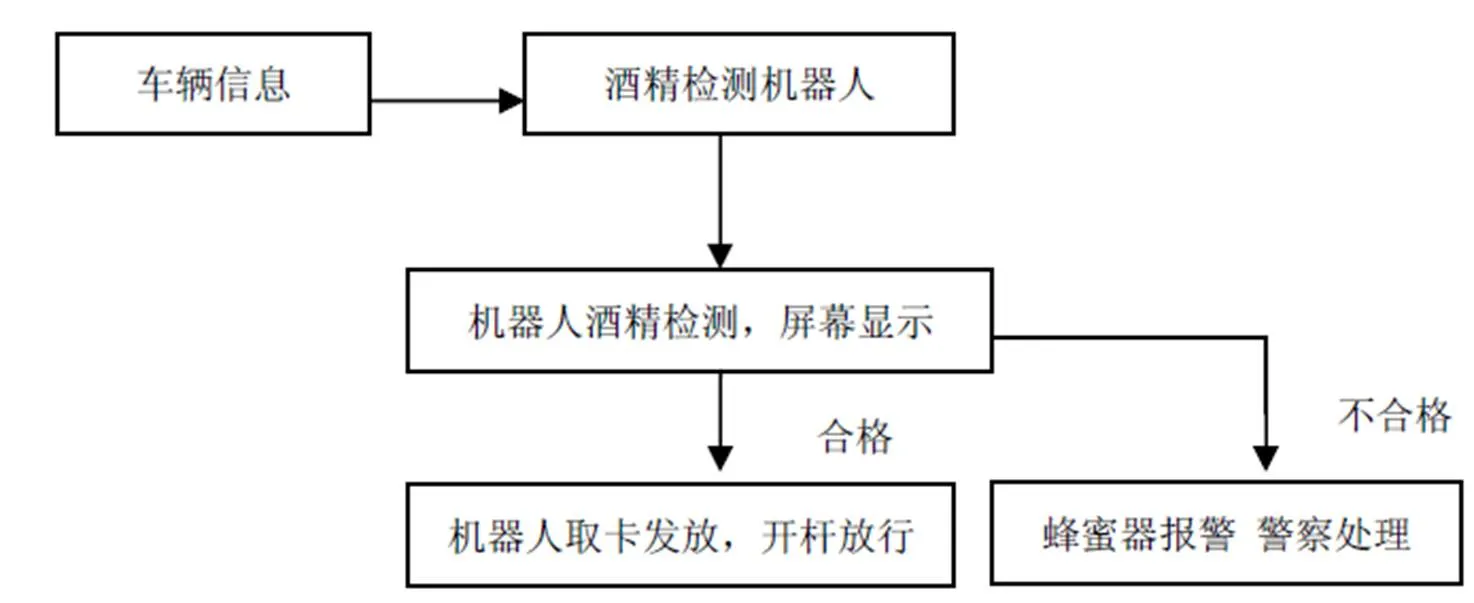
圖1 工作流程
2.末端執行器設計
末端執行器是工業機器人的關鍵技術之一,作為工業機器人的工具對操作對象進行拾取、安裝等操作,其結構設計的合理性直接影響機器人的工作效率[2]。酒精檢測機器人主要完成酒精檢測和取卡發放兩個動作,設計末端執行器的時候考慮結構和實用性,將其設計為雙邊式,一邊固定安裝酒精檢測儀,另一邊為膜片,通過電磁力吸合來夾持卡片。安裝側設計為與機器人第六軸tool0相適應的法蘭結構,便于安裝。其結構如圖2所示。
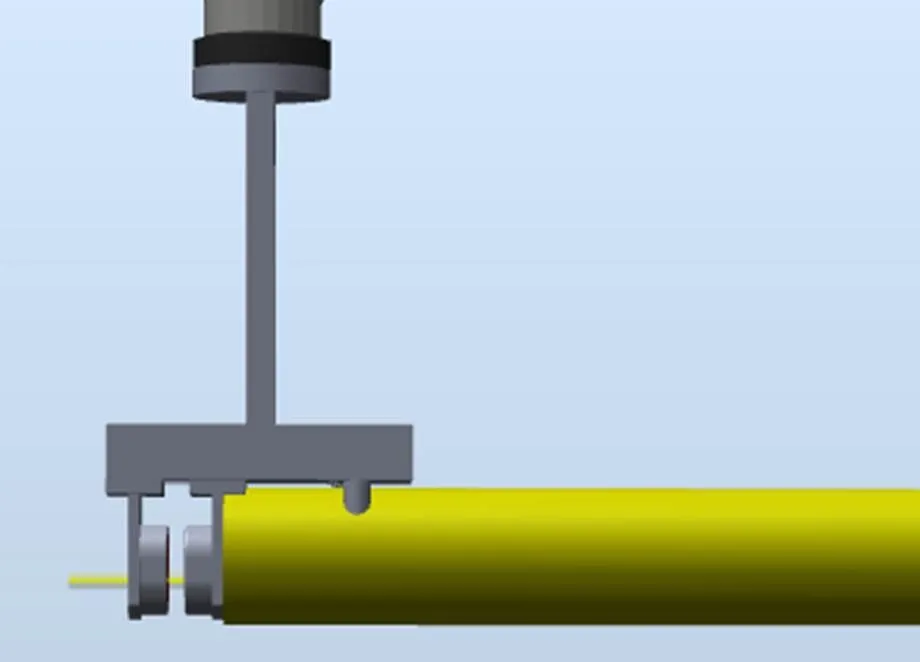
圖2 末端操作器
3.虛擬仿真
(1)創建三維建模
創建三維模型是構建仿真工作站的前提,RobotStudio能夠導入的三維模型格式很多,有IGES、STEP、VRML、VDAFS、ACIS等,考慮幾何模型特征丟失情況本工作站用SolidWorks設計三維模型,以*.sat格式導入[3]。設計的模型主要有高速收費站、小車、人物模型等。
(2)創建虛擬仿真工作站
導入ABB機器人IRB1410完成布局后創建機器人工作站,對設計的末端操作器“創建工具”并安裝在機器人上,利用“顯示機器人工作區域”功能測試機器人的可達性[4]。如圖3所示。

圖3 機器人工作站
(3)創建Smart組件
工作站的動作設計主要有汽車行駛、機器人酒精檢測、取卡發放、開桿放行等。通過創建機械裝置,建立Smart組件,完成仿真動畫。Smart組件是構建邏輯關系、實現動作的重要環節,本工作站運用了Rotator、LineSensor、LinearMover、Attacher、Detacher、Show、Hide等組件,其設計關系如圖4所示[5]。
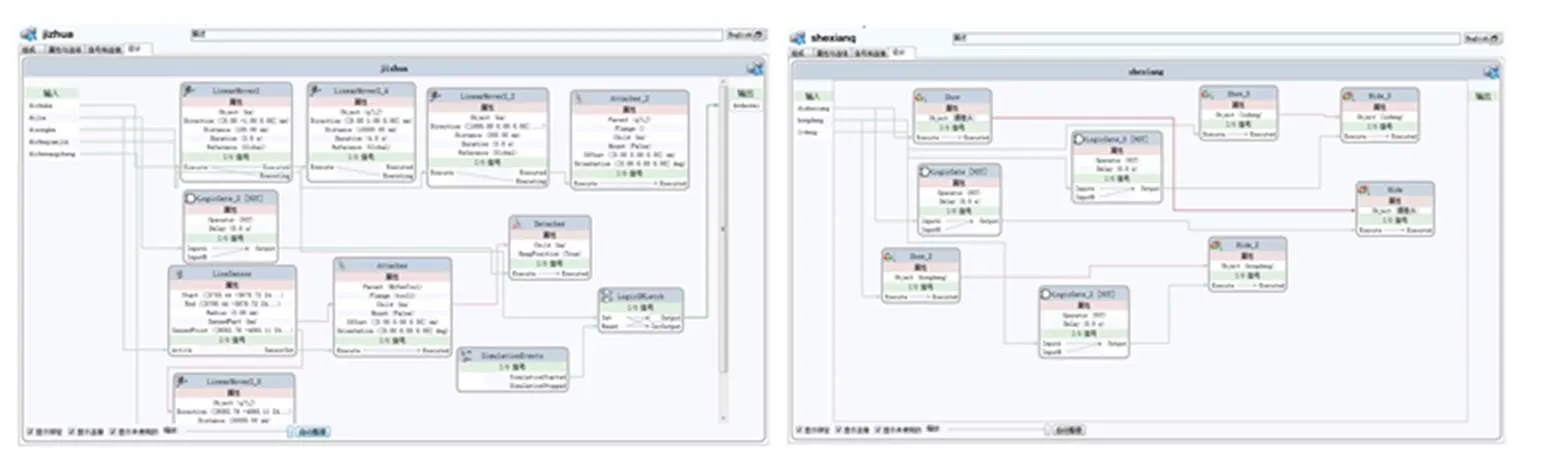
圖4 Smart組件設計
(4)RAPID程序及調試
RAPID程序是指令機器人動作的核心,通過對運動指令和先前建立的數字、模擬等信號的控制使機器人及外部裝置產生相應動作,完成所需要的控制要求[6]。部分RAPID程序如下:
PROC Path_20( )
MoveL phome,v1000,z100,tool1WObj:=wobj0;
WaitDI distart,1;
MoveL jiance1,v1000,fine,tool1WObj:=wobj0;
Set dishex;
MoveL jiace2,v200,fine,tool1WObj:=wobj0;
MoveL jiace3,v200,fine,tool1WObj:=wobj0;
MoveL jiace4,v200,fine,tool1WObj:=wobj0;
MoveL jiace5,v200,fine,tool1WObj:=wobj0;
MoveL jiace2,v200,fine,tool1WObj:=wobj0;
Reset dishex;
MoveL phome,v1000,z100,tool1WObj:=wobj0;
Path_10;
ENDPROC
(5)仿真錄像
設定好工作站邏輯后,通過I/O仿真器調試完成仿真錄像,生成EXE文件,如圖5所示。
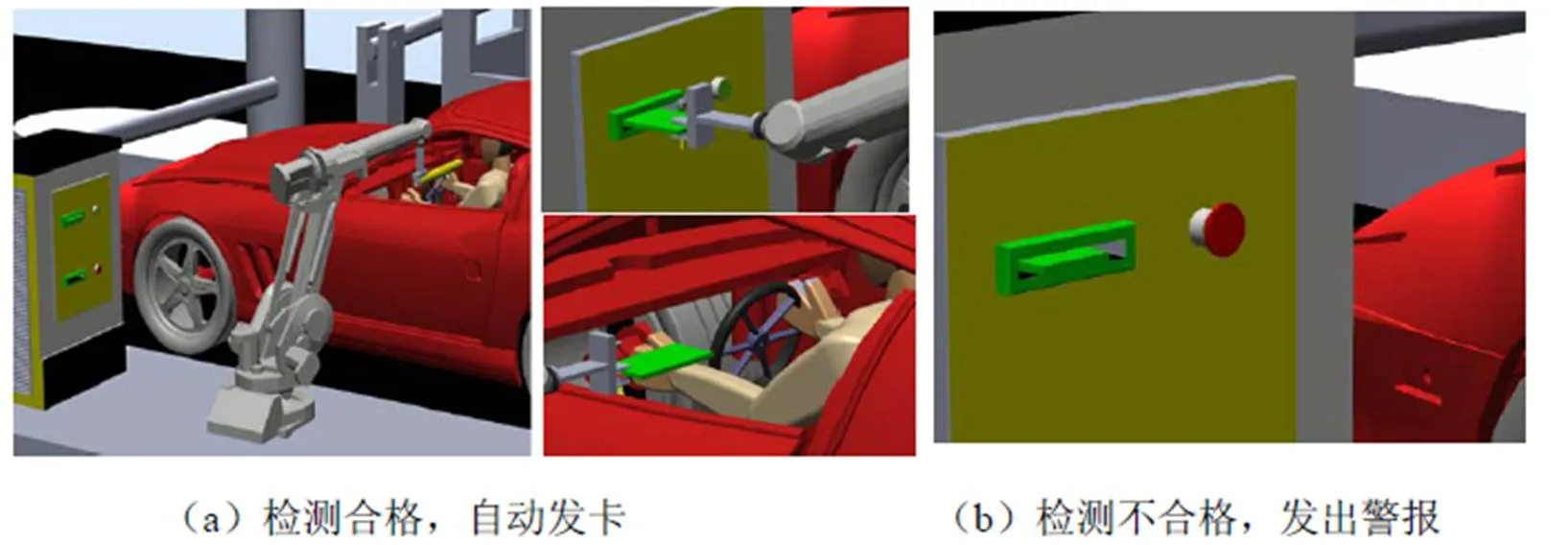
圖5 仿真情況
三、結語
本方案利用ABB工業機器人替代警察執行酒精檢測,通過RobotStudio的VirtualRobotru技術,仿真驗證工作過程,表明酒精檢測機器人實行酒精檢測和自動發卡在功能和操作上具有可實施性。
目前高速公路推廣實行ETC,但據調查,高速入口往往只有一個ETC通道,而發卡口有多個, ETC普及程度還不高。即使以后全面實行了ETC,也可以將酒精檢測機器人用于地下停車場、繁忙的交通路況等地方,仍然能夠起到監督、打擊酒后駕駛的作用。
酒精檢測機器人能大大減少警力投入,提高檢測酒駕的效率,駕駛員需通過酒精檢測后方可上路,不放過一例酒后駕車,對平安出行、和諧社會有重要的意義。
[1]宋鵬飛,和瑞林,苗金鐘等.基于SolidWorks的工業機器人離線編程系統[J].制造業自動化,2013,35(9):1-4.
[2]趙燕偉,鐘允暉,陳建等.基于UG加工信息的工業機器人離線編程[J].機械設計與制造工程,2013(2):40-44.
[3]任正軍.RB50機器人結構設計與仿真分析[D].武漢:華中科技大學,2014.
[4]周曉風.工業機器人生產線仿真系統設計及其關鍵技術研究[D].沈陽:東北大學,2013.
[5]葉暉.工業機器人工程應用虛擬仿真教程[M].北京:機械工業出版社,2014.
[6]呂世霞,周宇,沈玲.工業機器人現場編程與操作[M].武漢:華中科技大學出版社,2016.
Design and Simulation of Robot for Alcohol Test on Freeway
XIE Chao-ming
(Hubei Polytechnic Institute, Xiaogan, Hubei 432000, China)
The proposal of this program is to use the ABB industrial robot instead of the police to perform the alcohol test at the entrance of the high speed toll station. After passing the test, the robot will automatically release the card, if not qualified, and then the screen shows the alarm. The simulation results show that the robot can complete the alcohol detection and automatic card function, and can effectively distinguish the drunk drivers, is of great significance to maintain the safety of travel.
industrial robot; alcohol test; simulation
(責任編輯 王傲冰)
TP242
A
1008—6129(2016)05—0072—04
2016—08—20
謝超明(1982—),湖北孝感人,湖北職業技術學院機電工程學院,講師。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
海峽科技與產業(2016年3期)2016-05-17 04:32:12
公民與法治(2016年4期)2016-05-17 04:09:26
