油缸直驅式鉆機模型自動送鉆研究
2017-01-06 03:21:19劉振東張彥廷史明濱黃魯蒙
石油礦場機械 2016年12期
劉振東,張彥廷,張 偉,史明濱,王 康,黃魯蒙
(1.中國石油大學(華東) 石油工業訓練中心,山東 青島 266580;2.中國石油大學(華東) 機電工程學院,山東 青島 266580;3.中石化石油工程地球物理有限公司 華北分公司,鄭州 450000)①
·專題研究·
油缸直驅式鉆機模型自動送鉆研究
劉振東1,張彥廷2,張 偉3,史明濱2,王 康2,黃魯蒙2
(1.中國石油大學(華東) 石油工業訓練中心,山東 青島 266580;2.中國石油大學(華東) 機電工程學院,山東 青島 266580;3.中石化石油工程地球物理有限公司 華北分公司,鄭州 450000)①
為加快國內油缸直驅式鉆機的研發進程,利用三維造型軟件按比例設計了一套油缸直驅式鉆機模型及其液壓系統,并采用模糊PID控制技術對自動送鉆控制系統進行了設計和仿真研究,取得了良好的控制效果,可以滿足自動送鉆的使用要求。
鉆機;自動送鉆;模型設計;模糊PID
液壓技術在石油鉆機上得到了廣泛應用。挪威MH公司研制的Ram Rig鉆機已形成系列并批量生產,其負載能力1 470~9 800 kN,并利用液壓控制技術實現了恒鉆壓自動送鉆,鉆井效率提高15~20%[1]。國內石油鉆機的液壓技術與國外相比差距很大,為此,采用三維造型軟件按比例設計了一套油缸直驅式鉆機模型,并開展了自動送鉆控制研究。
1 油缸直驅式鉆機模型
1.1 主要技術參數
油缸直驅式鉆機的原型及模型(縮放比例為1∶5)技術參數如表1。
1.2 模型鉆機結構
模型鉆機主要包括井架、底座、主油缸、頂驅、鐵鉆工和管子操作系統等,如圖1所示。其中主油缸為鉆機的核心執行單元。
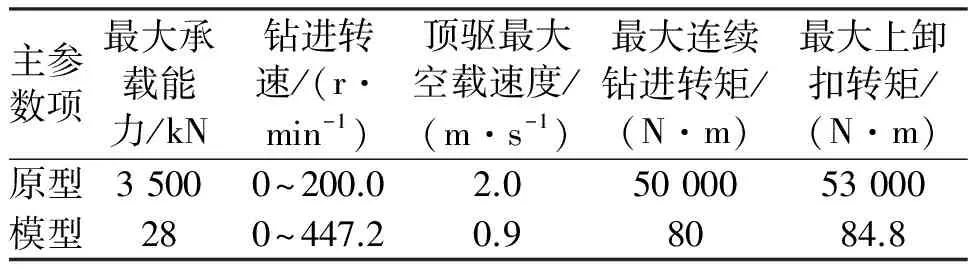
表1 油缸直驅式鉆機技術參數

圖1 油缸直驅式鉆機模型
1.3 主油缸液壓系統
主油缸的液壓系統原理如圖2所示。選用EP型變量柱塞泵,可以通過實時調整泵的輸出流量和壓力,達到降低能耗的效果;選用2個比例調速閥來控制主油缸,以滿足主油缸在不同工況下速度相差大的要求,并達到良好的控制精度。

圖2 主油缸液壓系統原理
2 自動送鉆控制原理及方法
2.1 控制原理
自動送鉆采用恒鉆壓方式,控制原理如圖3所示。自動送鉆時,電磁鐵1YA、3YA、4YA和5YA通電,PLC根據主油缸1無桿腔工作壓力控制比例電磁鐵5YB的閥口開度,實現對主油缸1的速度控制,從而實現實際鉆壓與目標鉆壓保持基本相等。
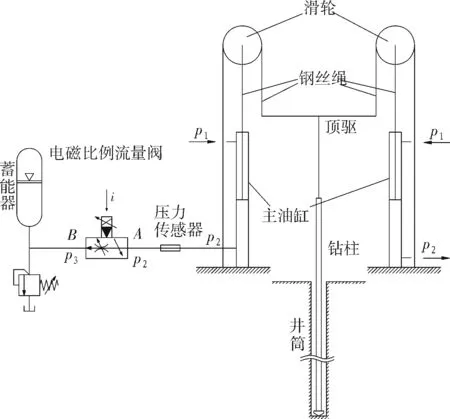
圖3 自動送鉆控制原理
2.2 控制方法
井底鉆壓與主油缸無桿腔壓力、有桿腔壓力和鉆具重力的關系為
WZ=(m1+m2)g+p1A1-p2A2
(1)
式中:WZ為井底對鉆頭的作用力,N;m1為主油缸活動部件的質量,kg;m2為鉆具質量,kg;A1和A2分別為主油缸有桿腔、無桿腔工作面積,m2;g為重力加速度,9.8 m/s2;p1和p2分別為主油缸有桿腔、無桿腔工作壓力,Pa。
為提高系統控制精度,將鉆壓控制系統分解為三環控制系統[2],如圖4所示。
由內到外,分別為流量、速度和鉆壓控制回路。為簡化算法,采用單元反饋。
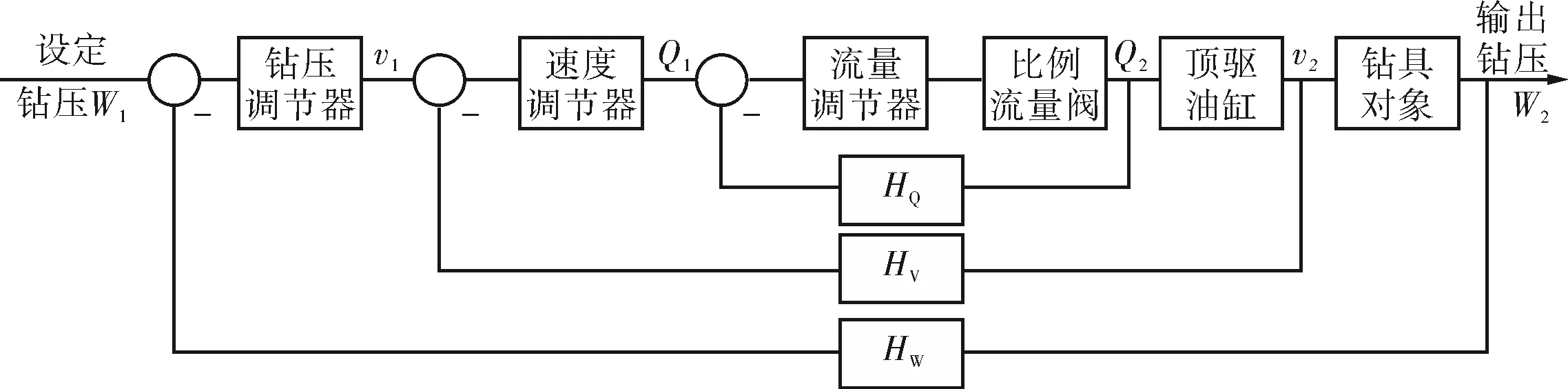
圖4 自動送鉆控制框圖
3 流量控制環設計
比例調速閥原理如圖5所示[3]。

圖5 比例調速閥原理
流量控制框圖如圖6所示。圖6中Ka為流量-電流比例系數,I為電流,D(s)為比例電磁鐵傳遞函數,x為閥芯位移,L(s)為從x到調速閥流量的傳遞函數。

圖6 流量環控制框圖
3.1 比例電磁鐵傳遞函數
比例電磁鐵的輸出力動態特性為
(2)
式中:KFi為電流力增益,N/A;fM為電磁滯回力,N;τd為純延遲時間,s;Fr為庫侖摩擦力,N。
比例電磁鐵的位移動態特性為
(3)
式中:m、Ks、c分別為等效質量、彈簧剛度和阻尼系數。
對式(2)、(3)進行拉氏變換,并取Fr=0,fM=0,τd=0,得:
(4)
取KFi=175 N/A,m=0.5 kg,Ks=800 N/m,c=500 N·s/m,則比例電磁鐵傳遞函數為
(5)
3.2 位移-流量傳遞函數

(6)
3.3 流量環傳遞函數
由式(5)、(6)可得流量控制的開環傳遞函數為
(7)
流量環閉環采用PID控制方法。
4 速度控制環設計
4.1 油液連續性方程
主油缸無桿腔液壓油的連續性方程[4]為
(8)
式中:v為主油缸活塞速度,m/s;q為無桿腔流量,m3/s;βe為液壓油體積彈性模量,Pa;Vc為無桿腔容積,m3;Cip為主油缸內部泄露系數,m5/(N·s)。
4.2 活塞動力平衡方程
主油缸活塞運動的力平衡方程[5]為
(m1+m2)g+p1A1-p2A2-WZ-f=
(9)
式中:WZ為鉆壓設定值,N;f為鉆柱所受到的浮力和摩擦力,N;k1和k2分別為油液、鉆柱彈簧剛度,N/m;B1和B2分別為主油缸活塞和井筒中鉆柱的黏性阻尼系數,kg/s;y為主油缸活塞位移,m。
對式(8)、(9)進行拉氏變換,得:
(10)
4.3 流量-速度傳遞函數
在自動送鉆過程中,難以準確測得F(s)的變化規律,所以取F(s)=0;當送鉆速度與鉆進速度相近時,鉆具變形很小,取k1=k2=0;由于鉆進加速度很小,頂驅和鉆具的加速度對其影響很小,流量-速度傳遞函數為
(11)

(12)
4.4 速度環傳遞函數
速度環控制框圖如圖7所示。圖7中為Kb速度-流量系數,Gv(s)為流量-速度傳遞函數。

圖7 速度環控制方框圖
5 鉆壓控制環設計
目前廣泛采用的鉆壓與鉆進速度之間的表達式為修正楊格模式[6]。
(13)
式中:v為鉆進速度;K1為巖石可鉆性系數;M為門限鉆壓;Cp為壓差影響系數;CH為水力參數影響系數;C2為鉆頭牙齒磨損系數;n為鉆柱轉速;h為鉆頭牙齒磨損量。
v(s)=KWZ(s)-KM(s)
(14)
由于鉆井過程中,在各種擾動因素影響下很多參數難以測量,系數不斷變化;同時M(s)也在不斷變化,無法得到確切的狀態方程,為此采用模糊控制。
鉆壓環控制框圖如圖8所示。模糊控制器采用單變量二維模糊控制器。

圖8 鉆壓環控制框圖
5.1 模糊控制器設計
取鉆壓誤差e的基本論域為[-4,+4]N;ec的基本論域為[-16,+16]N/s。在自動送鉆過程中只能實現單向的加速和減速,所以u的論域是非對稱的。取主油缸的速度變化范圍為[0,0.002 25]m/s,為便于計算,采用增量式,取值[-0.000 4,+0.000 4] m/s。
將e和ec的模糊論域量化為13檔,u的模糊論域量化為15檔。為提高控制精度,設定e的隸屬度函數在零值附近比較集中;解模糊方法采用最大隸屬度法,模糊控制規則如表2所示。

表2 模糊控制規則[2]
5.2 模糊控制系統仿真
控制系統仿真框圖如圖9所示。

圖9 系統仿真框圖
流量環取Kp=600,tI=0.2,tD=0.02;速度環取Kp=0.8,Ki=0.025;壓力環1/K為6.35×105N·s/m,M為85 N,WZ為1 650 N。系統階躍響應曲線如圖10所示。
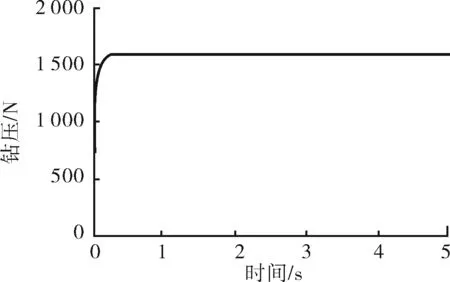
圖10 系統階躍響應曲線
由圖10可見:系統未出現超調現象,穩態誤差為0.31%,調整時間為0.32 s,能夠快速達到穩定狀態并保持,滿足自動送鉆控制要求。
6 結論
1) 利用三維造型軟件按比例設計了一套油缸直驅式石油鉆機模型,并完成了液壓系統設計。
2) 針對該鉆機油缸直驅式的特點,建立了自動送鉆控制系統的數學模型;采用模糊PID控制技術對流量環、速度環和壓力環通過Simulink進行了仿真,取得了理想的控制效果,為油缸直驅式鉆機的研制及其自動送鉆控制提供了一定的技術參考。
[1] 張連山.國外液壓驅動石油鉆機的新進展[J].石油機械,2000,28(2):52-54.
[2] 高巖.石油鉆機自動送鉆智能控制系統[D].西安:西安建筑科技大學,2004.
[3] 吳根茂,邱敏秀,王慶豐.實用電液比例技術[M].杭州:浙江大學出版社,1993.
[4] 李永堂,雷步芳,高雨茁.液壓系統建模與仿真[M].北京:冶金工業出版社,2003.
[5] 李延龍.液壓驅動柱塞泵比例控制若干問題的研究[D].東營:中國石油大學(華東),2006.
[6] 郭學增.最優化鉆井理論基礎與計算[M].北京:石油工業出版,1987.
Automatic Drill Research of Hydro-cylinder Direct-drive Rig Model
LIU Zhendong1,ZHANG Yanting2,ZHANG Wei3,SHI Mingbin2,WANG Kang2,HUANG Lumeng2
(1.Petroleum Industry Training Center,China University of Petroleum,Qingdao 266580,China;2.CollegeofMechanicalandElectricalEngineering,ChinaUniversityofPetroleum,Qingdao266580,China;3.HuabeiBranch,SinopecGeophysicalCorporation,Zhengzhou450000,China)
In order to speed up the research process of hydro-cylinder direct-drive rig in domestic,a 3D modeling software is used to design a set of hydro-cylinder direct-drive rig model,to design the hydraulic system,and fuzzy PID control technology is used to design automatic drilling control system,the simulation shows the result is good,and can satisfy the requirement of automatic drilling.
rig;automatic drilling;model design;fuzzy PID
1001-3482(2016)12-0001-05
2016-06-06
中國博士后科學基金資助項目(2016M592269);青島市博士后資助項目(2015253)
劉振東(1982-),男,山東單縣人,工程師,博士研究生,主要從事陸地和海洋石油鉆井裝備的研發工作,E-mail:liuzd28@upc.edu.cn。
TE928
A
10.3969/j.issn.1001-3482.2016.12.001