精密單點定位與雙差單歷元動態(tài)定位的精度分析
2017-01-05 01:33:39王成龍
導(dǎo)航定位學(xué)報 2016年4期
關(guān)鍵詞:數(shù)據(jù)處理
韓 菲,王成龍
(1.西安坤煜測繪地理信息工程有限公司,陜西 西安 410054;2.北京四維遠(yuǎn)見信息技術(shù)有限公司,北京 100070)
?
精密單點定位與雙差單歷元動態(tài)定位的精度分析
韓 菲1,王成龍2
(1.西安坤煜測繪地理信息工程有限公司,陜西 西安 410054;2.北京四維遠(yuǎn)見信息技術(shù)有限公司,北京 100070)
為了進一步研究GPS數(shù)據(jù)處理方法,結(jié)合BERRESE5.0軟件在單歷元解算中的應(yīng)用,闡述了精密單點動態(tài)定位(PPP)和差分動態(tài)定位處理模型和解算方法;為驗證2種單歷元動態(tài)定位模型的精度,提出了一套驗證方案,并通過對實驗數(shù)據(jù)分析驗證,得出了BERNESE5.0軟件2種動態(tài)數(shù)據(jù)處理模型的精度。結(jié)果表明BERNESE5.0的PPP模型和雙差模型在動態(tài)數(shù)據(jù)處理中的應(yīng)用可達(dá)到優(yōu)于5 cm的定位精度。
BERNESE5.0;精密單點定位;雙差定位;單歷元動態(tài)定位
0 引言
隨著全球定位系統(tǒng)(global positioning system,GPS)靜態(tài)定位技術(shù)在地球動力學(xué)和大地測量學(xué)領(lǐng)域應(yīng)用的不斷深入,GPS動態(tài)定位、單歷元解算技術(shù)在車輛、船舶和飛機的定位和導(dǎo)航、航空遙感平臺定位、地震學(xué)研究中均得到廣泛的應(yīng)用[1]。
目前被廣泛使用的3大高精度GPS數(shù)據(jù)處理軟件均可以進行單歷元數(shù)據(jù)處理:美國麻省理工學(xué)院(Massachusetts Institute of Technology,MIT)和美國斯克里普斯海洋研究所(Scripps Institution of Oceanography,SIO)聯(lián)合開發(fā)的GAMIT/GLOBK軟件的TRACK運動學(xué)分析模塊[2]、瑞士伯爾尼大學(xué)天文研究所(Astronomy Institute of Bernese University)研發(fā)的BERNESE5.0軟件的運動學(xué)坐標(biāo)解算模塊[3]、美國NASA/Caltech噴氣推進實驗室研發(fā)的GIPSY軟件的高精度運動學(xué)數(shù)據(jù)處理方法[4-5]。TRACK和BERNESE都必須選取一個參考站才能進行動態(tài)差分定位;GIPSY則需要一個基站提供時鐘信息,用來得到相對于基站的坐標(biāo);BERNESE5.0的精密單點定位(precise point positioning,PPP)模型也可以進行單站的單歷元動態(tài)解算[6]。
BERNESE軟件是由瑞士伯爾尼大學(xué)天文研究所研究開發(fā)的全球衛(wèi)星導(dǎo)航系統(tǒng)(global navigation satellite system,GNSS)——包括格洛納斯衛(wèi)星導(dǎo)航系統(tǒng)(GLONASS)數(shù)據(jù)、GPS數(shù)據(jù)和衛(wèi)星激光測距(satellite laser ranging,SLR)——數(shù)據(jù)處理軟件,有專業(yè)團隊對其進行維護和更新,2004年12月推出了5.0版本,BERNESE5.0功能在BERNESE4.2基礎(chǔ)上得到進一步的提升;2013年7月更新至5.2版本。
BERNESE5.0軟件可以基于非差、PPP、雙差3種模式進行單歷元坐標(biāo)估計。PPP技術(shù)為長基線高精度事后實時動態(tài)定位的一個新的解決方案[7-8]。BERNESE5.0可以同時對動態(tài)站和靜態(tài)站混合數(shù)據(jù)進行解算。本論文將研究BERNESE5.0軟件基于PPP和雙差2種模式的動態(tài)數(shù)據(jù)處理方法及其精度分析。
1 BERNESE5.0的單歷元解算
在單歷元數(shù)據(jù)處理中,每個歷元的坐標(biāo)作為未知參數(shù),具有很小的冗余度;使用6~10個單差觀測值實現(xiàn)對3個坐標(biāo)和其他一些未知數(shù)如模糊度、對流層等參數(shù)的估計:所以在數(shù)據(jù)預(yù)處理階段,要謹(jǐn)慎地剔除歷元,使用盡可能多的數(shù)據(jù)才能估計出更可靠的未知參數(shù),太少的冗余度也使得粗差探測不可靠。單歷元解算對數(shù)據(jù)的質(zhì)量十分敏感[5]。
BERNESE5.0推薦使用的單歷元數(shù)據(jù)處理方法:先用PPP解算流動站每個歷元的先驗坐標(biāo),做為雙差解算的先驗坐標(biāo);然后用1個站或者多個站約束的方式解算流動站坐標(biāo)。
特別注意的是,在數(shù)據(jù)預(yù)處理之后,GPS數(shù)據(jù)或許不再連續(xù);這會導(dǎo)致在歷元時間序列中出現(xiàn)跳變,在這些歷元處模糊度也將不連續(xù)。其次,在估計單歷元坐標(biāo)時,如果給定的先驗方差不合適,也會出現(xiàn)中間歷元坐標(biāo)不連續(xù)的情況[9]。
這些問題的解決方法是在周跳、粗差探測、模糊度的解算過程中,盡可能使得參數(shù)的設(shè)置與數(shù)據(jù)的質(zhì)量相匹配。
2 BERNESE5.0動態(tài)處理模型
BERNESE5.0軟件可以基于非差、PPP、雙差3種模式進行單歷元坐標(biāo)估計。在此將詳細(xì)介紹基于PPP和雙差模式的單歷元解算方法。
在BERNSESE5.0軟件中,推薦使用CODSPP和GPSEST來實現(xiàn)動態(tài)坐標(biāo)的逐歷元解算。在CODSPP中激活“Kinematic”的坐標(biāo)估計模式,然后一套新的坐標(biāo)將按照每個歷元單獨估計。坐標(biāo)估計按照迭代解算方式,同時計算每個坐標(biāo)解算的殘差,通過殘差來探測出表現(xiàn)過差的衛(wèi)星數(shù)據(jù);通過迭代直到得到一個可以接受的坐標(biāo)解,或者殘差變得很小。在CODSPP的坐標(biāo)估計中,只有有鐘差值的歷元才能得到單歷元解算的坐標(biāo)(標(biāo)記為“KIN”)。在此也可以首先引入一個動態(tài)坐標(biāo)作為每個歷元的先驗坐標(biāo)(只有標(biāo)示為“KIN”的坐標(biāo)被使用)[9]。
在MAUPRP(主要是相位的預(yù)處理功能)中如果激活“Kinematic”模式,將利用單差數(shù)據(jù)估計相鄰歷元的坐標(biāo)變化量(歷元差分解);只有標(biāo)示為“K”的坐標(biāo)被估計。對于歷元間差分解,因為有4個參數(shù)需要估計,所以模型冗余很小,尤其當(dāng)觀測衛(wèi)星少的時候;這將影響周跳探測的可靠性。如果要改善這種情況,可以引入相對優(yōu)質(zhì)的先驗坐標(biāo)[9]。
在GPSEST中,可以對固定站進行約束來實現(xiàn)對流動站的單歷元坐標(biāo)估計:首先引入質(zhì)量比較好的流動站先驗坐標(biāo),然后激活動態(tài)坐標(biāo)估計模式,采用逐個歷元估計模式;同時,在處理中要選擇好固定站和待估計的流動站,同時可以給定固定站合適的約束條件,有2種約束條件模式——可以對平面和高程(北、東、天,分別簡稱N、E、U)分別給定約束值,也可以對空間直角坐標(biāo)系的3個方向(X、Y、Z)分別給定約束值[9]。
在BERNESE5.0的動態(tài)坐標(biāo)文件中,“K”表明該坐標(biāo)的可靠性比價強,說明該歷元的觀測數(shù)據(jù)比較充足,平差冗余條件比較多。在動態(tài)估計中,在先驗坐標(biāo)文件中沒有“K”的歷元將被跳過。
3 單歷元解算精度驗證
為了驗證BERNESE5.0軟件基于非差和雙差數(shù)據(jù)分別進行單歷元動態(tài)解算的精度,曾經(jīng)思考過2種試驗方案,分別為:
1)利用實時動態(tài)數(shù)據(jù),分別使用BERNESE5.0的PPP和差分模式分別進行單歷元解算;再用GAMIT/GLOBK軟件的TRACK模塊或者使用GIPSY解算,然后將它們的結(jié)果進行逐歷元比較分析。
2)利用靜態(tài)數(shù)據(jù),按照動態(tài)數(shù)據(jù)處理模式,分別使用BERNESE5.0的PPP和差分模式進行單歷元動態(tài)處理得到2 880個歷元坐標(biāo);然后用靜態(tài)模式處理當(dāng)天該站點的全天數(shù)據(jù)得到當(dāng)前時段瞬時歷元的坐標(biāo)為“真值”,將BERNESE5.0的PPP和差分動態(tài)坐標(biāo)與“真值”進行逐歷元的比較。
方案1的可行性研究:如果使用GAMIT/GLOBK的TRACK模塊或者GIPSY的結(jié)果作為參考值,因為其精度也在cm級,所以很難假定其為該點的真實運動軌跡。
方案2的可行性研究:首先在小范圍小幅度的運動物體的監(jiān)測中(比如地震等),其活動幅度在半個波長之內(nèi)的就沒有必要引入新的周跳或者模糊度;其次對衛(wèi)星的跟蹤動態(tài)和靜態(tài)基本是一致的;同時,將靜態(tài)點24 h靜態(tài)解坐標(biāo)作為參考值的“真值”也是很客觀、可行的,因為其靜態(tài)解算精度為mm級別,這個方案更加可靠。
經(jīng)過認(rèn)真比較分析,以方案2進行實例驗證比較合適。
4 實驗與結(jié)果分析
4.1 試驗數(shù)據(jù)
本文試驗數(shù)據(jù)采用國際GNSS服務(wù)(international GNSS service,IGS)站中3個歐洲站點MATE(Matera)、ONSA(ONSALA)、VILL(Villafranca)的數(shù)據(jù)為試驗數(shù)據(jù),這3個站均為國際IGS核心站,它們參與了國際地球參考框架(international terrestrial reference frame,ITRF)的實現(xiàn),其站點均十分穩(wěn)定。
試驗數(shù)據(jù)采用2014-04-10(doy100)時段長度23.5 h、采樣30 s的數(shù)據(jù)。接收機分別采用LEICA GRX1200GGPRO、JAVAD TRE-G3TH DELTA、SEPT POLARX4雙頻接收機,天線采用LEIAT504GG、AOAD/M-B、SEPCHOKE-MC。
3個站的數(shù)據(jù)均經(jīng)過TEQC進行質(zhì)量檢驗,其多路徑MP1和MP2均小于0.4 m。
數(shù)據(jù)解算將在ITRF2008框架、瞬時歷元(doy100)下進行。
4.2 解算和比較模式
1)動態(tài)解算。首先成果A采用PPP單歷元模式,直接對流動站MATE進行動態(tài)處理,得到PPP單歷元坐標(biāo);然后成果B以PPP得到的單歷元坐標(biāo)作為初始坐標(biāo),采用雙差單歷元模式,將ONSA和VILL 2個站作為固定站,將MATE作為流動站;固定ONSA和VILL來對MATE站進行單歷元動態(tài)解算,得到雙差動態(tài)2 880個單歷元的坐標(biāo)。
2)“真值”靜態(tài)解。成果C(“真值”)添加MATE周邊的6個國際IGS站作強約束,采用雙差靜態(tài)解模式解算2014-04-10(doy100)當(dāng)天23.5 h的MATE數(shù)據(jù),從而得到靜態(tài)解作為該點坐標(biāo)的“真值”,以供與動態(tài)單歷元解進行比較。
3)比較方法。將成果A和成果B的每個歷元結(jié)果均與成果C進行比較,得到2 880個歷元的較差;通過差異來分析各自解算精度情況。
4.3 比較結(jié)果與分析
BENRESE5.0軟件基于PPP和雙差的動態(tài)定位結(jié)果與點位真值比較見圖1、圖2。
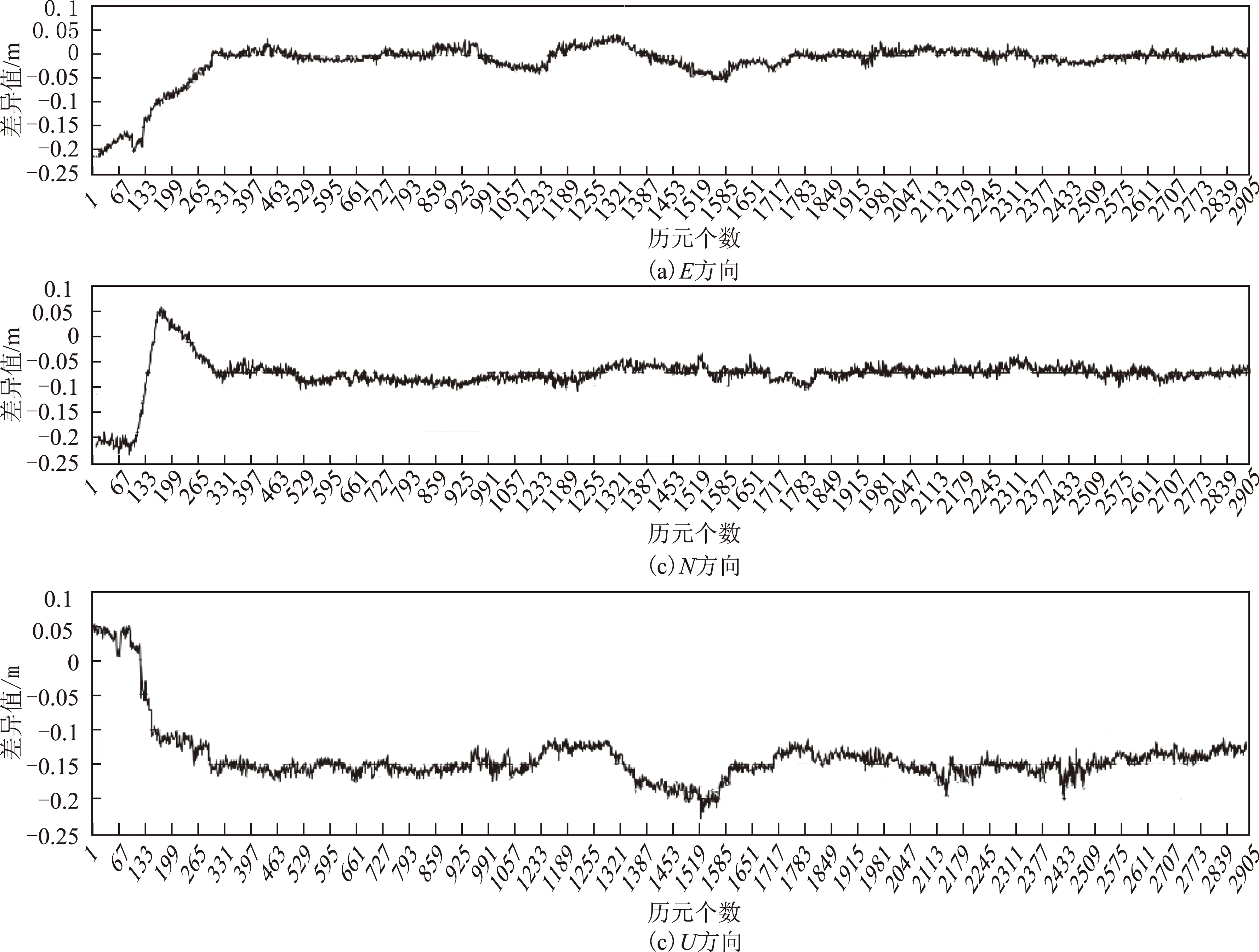
圖1 PPP模式的動態(tài)定位結(jié)果與真值比較(2 880個歷元)

圖2 雙差模式的動態(tài)定位結(jié)果與真值比較(剔除前250個歷元)
通過偏差數(shù)據(jù)和以上2個序列圖可以看出:
1)基于PPP模式的動態(tài)數(shù)據(jù)處理在前230個歷元的坐標(biāo)波動比較大;但呈現(xiàn)收斂趨勢。前100個歷元收斂速度比較慢,平面(N/E方向)精度從0.22 m逐漸收斂至0.10 m,高程U方向精度從0.42 m逐漸收斂至0.30 m;從第130歷元至第230歷元的估計精度迅速收斂至0.1 m。從230個歷元之后歷元估計的精度基本比較穩(wěn)定,平面和高程精度保持在2.8 cm左右;但在第1 330至第1 678歷元之間,U方向產(chǎn)生了0.2 m的波動,分析原因可能為該時段電離層比較活躍,導(dǎo)致U方向精度比較差。
2)基于雙差模式的動態(tài)數(shù)據(jù)處理在前200個歷元的坐標(biāo)波動比較大,相對于真值,其平面(N/E方向)精度從0.1 m逐漸收斂,高程U方向精度從0.35 m逐漸收斂。從第200個歷元之后精度基本比較穩(wěn)定,平面N方向最大誤差為5 cm,平均誤差為1 cm;平面E方向最大誤差為7 cm,平均誤差為2.6 cm;高程方向最大誤差為0.12 m(出現(xiàn)在中午時段),平均誤差為2.4 cm;可以看出平面和高程精度基本在2.7 cm左右。但在第1 330至第1 678歷元之間,U方向產(chǎn)生了0.1 m的波動,分析原因可能為該時段電離層比較活躍,導(dǎo)致U方向精度比較差。
5 結(jié)束語
從試驗可以看到BERNESE5.0軟件的PPP和雙差在動態(tài)定位中的可靠性是比較強的。從PPP和雙差動態(tài)的歷元坐標(biāo)收斂情況來看,2種定位模式具有一致的收斂趨勢,隨著數(shù)據(jù)質(zhì)量的差異,其表現(xiàn)出來的精度趨勢也一致;在數(shù)據(jù)質(zhì)量比較好的情況下,PPP動態(tài)精度可以達(dá)到平面2.8 cm、高程3.2 cm,雙差動態(tài)精度可以達(dá)到平面2.2 cm、高程2.7 cm。根據(jù)實驗情況可以得到結(jié)論:基于BERNESE5.0軟件的PPP、雙差動態(tài)定位可以達(dá)到優(yōu)于5 cm的精度。
[1] 付青.多衛(wèi)星導(dǎo)航系統(tǒng)精密單點定位精度分析[J].全球定位系統(tǒng),2014,39(6):42-46,55.
[2] Anonymous.Example of the usage of track[EB/OL].[2016-02-15].http://geoweb.mit.edu/~tah/track-example.
[3] BOCK H,DACH R,JGGI A,et al.High-rate GPS clock corrfections from CODE:support of 1 Hz applications[J].Journal of Geodesy,2009,83(11):1083-1094.DOI:10.1007/s00190-009-0326-1.
[4] Jet Propulsion Laboratory California Institute of Technology.GIPSY5.0 release note[EB/OL].(2008-06-02)[2016-02-15].http://gipsy-oasis.jpl.nasa.gov/gipsy/docs/Release-Note-5.0.pdf.
[5] 陳義.精密點定位的基本原理和應(yīng)用[J].同濟大學(xué)學(xué)報:自然科學(xué)版,2006,34 (7):919-923.
[6] 殷海濤,甘衛(wèi)軍,肖根如,等.利用高頻GPS技術(shù)進行強震地面運動監(jiān)測的研究進展[J].地球物理學(xué)進展,2009,24(6):2012-2019.
[7] 張小紅.動態(tài)精度單點定位( PPP)的精度分析[J].全球定位系統(tǒng),2006,31(1):7-11,22.
[8] 宋偉偉,施闖,姚宜斌,等.單頻精密單點定位電離層改正方法和定位精度研究[J].武漢大學(xué)學(xué)報·信息科學(xué)版,2009,34(7):778-790.
[9] DACH R,HUGENTOBLER U,F(xiàn)RIDEZ P,et al.Bernese GPS software version5.0[Z].Bern:Astronomical Institute,University of Bern,2007:35-40.
Precision analysis on precise point positioning and dynamic double-difference positioning
HAN Fei1,WANG Chenglong2
(1.Xi'an Sidamaier Surveying Engineering Co.,Ltd.,Xi’an,Shanxi 410054,China;2.Beijing Geo-Vision Tech Co.,Beijing 100070,China)
In order to further study on GPS data processing,combining with the BERNESE5.0,the paper discussed the data-processing models and the resolution used in the dynamic single-epoch positioning and dynamic double-difference processing.For checking the precision of the two models,a set of verification methods was proposed.Experimental result showed that the accuracy of the two dynamic data processing models of BERNESE5.0 could be better than 5 cm.
BERNESE5.0;precise point positioning;double difference;single-epoch dynamic positioning
2016-02-17
韓菲(1981—),男,河南滎陽人,碩士,工程師,研究方向為GPS數(shù)據(jù)處理及其理論研究。
韓菲,王成龍.精密單點定位與雙差單歷元動態(tài)定位的精度分析[J].導(dǎo)航定位學(xué)報,2016,4(4):108-111.(HAN Fei,WANG Chenglong.Precision analysis on precise point positioning and dynamic double-difference positioning[J].Journal of Navigation and Positioning,2016,4(4):108-111.)
10.16547/j.cnki.10-1096.20160421.
P228
A
2095-4999(2016)04-0108-04
猜你喜歡
中學(xué)生數(shù)理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學(xué)報(2022年4期)2022-04-12 07:38:02
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當(dāng)代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術(shù)學(xué)報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學(xué)學(xué)報(自然科學(xué)版)(2015年3期)2015-02-27 15:31:22
聯(lián)合國青年技術(shù)培訓(xùn)(2014年7期)2014-04-12 00:00:00
中國質(zhì)量與標(biāo)準(zhǔn)導(dǎo)報(2014年7期)2014-02-28 22:24:35
