GNSS/UWB高精度室內(nèi)外組合定位方法
2017-01-05 01:33:25郝雨時徐愛功
導航定位學報 2016年4期
關鍵詞:系統(tǒng)
郝雨時,徐愛功,隋 心,2
(1.遼寧工程技術大學 測繪與地理科學學院,遼寧 阜新 123000;2.武漢大學 衛(wèi)星導航定位技術研究中心,湖北 武漢 430079)
?
GNSS/UWB高精度室內(nèi)外組合定位方法
郝雨時1,徐愛功1,隋 心1,2
(1.遼寧工程技術大學 測繪與地理科學學院,遼寧 阜新 123000;2.武漢大學 衛(wèi)星導航定位技術研究中心,湖北 武漢 430079)
為了提高無縫定位中室內(nèi)外接合處的定位能力及精度,采用GNSS和UWB 2類傳感器進行組合,在對GNSS和UWB時空基準統(tǒng)一進行處理的基礎上,組建GNSS和UWB緊組合定位模型,并采用赫爾默特方差估計方法對2類傳感器進行定權。最后利用室內(nèi)外接合處靜態(tài)和動態(tài)定位實驗對組合定位模型進行驗證,結果表明基于GNSS/UWB定位系統(tǒng),室內(nèi)外靜態(tài)定位平面精度可達到cm級,室內(nèi)外實時動態(tài)平面定位精度達到亞dm級。
GNSS;UWB;組合定位;高精度
0 引言
無縫定位技術是指在人類活動的地上、地下空間和外層空間范圍內(nèi),能夠聯(lián)合采用不同定位技術以達到對各種定位應用的無縫覆蓋,同時保證各種場景下定位技術、定位算法、定位精度和覆蓋范圍的平滑過渡和無縫連接[1]。全球衛(wèi)星導航系統(tǒng)(global navigation satellite system,GNSS)可以在室外良好觀測環(huán)境下取得良好的定位結果,超寬帶(ultra wide-band,UWB)定位技術在室內(nèi)環(huán)境下可進行高精度室內(nèi)定位;但在室內(nèi)外交接處等復雜環(huán)境下,GNSS和UWB的定位能力和精度均受到較大影響。由于GNSS衛(wèi)星信號易受到建筑物的遮擋和折射,導致觀測衛(wèi)星個數(shù)變少或產(chǎn)生多路徑效應,在室內(nèi)外結合處UWB信號也會遭受折射、多徑或非視距誤差(non light of sight,NLOS)等影響[4];因此有必要對室內(nèi)外交接處的高精度無縫定位方法進行研究。
目前,世界上已經(jīng)建成的全球導航衛(wèi)星系統(tǒng)包括美國全球定位系統(tǒng)(global positioning system,GPS)系統(tǒng)、俄羅斯全球衛(wèi)星導航系統(tǒng)(global navigation satellite system,GLONASS)系統(tǒng)。處于建設階段的系統(tǒng)包括中國的北斗衛(wèi)星導航系統(tǒng)(BeiDou navigation satellite system,BDS)以及歐洲的伽利略衛(wèi)星導航系統(tǒng)(Galileo satellite navigation system,Galileo)系統(tǒng)[1]。采用多GNSS系統(tǒng)組合定位在一定程度上可以改善惡劣觀測環(huán)境下定位的可用性、可靠性及精度;但當觀測衛(wèi)星的總個數(shù)低于4顆或衛(wèi)星星座構成較差情況下,單獨采用多GNSS組合定位算法仍不能完全解決室內(nèi)外接合處的定位問題:因此需要考慮采用其他傳感器對GNSS定位進行增強。
UWB信號具有傳輸速率高、功率低、分辨率高、抗干擾能力強、定位精度高(理論上定位精度可達到cm級)等優(yōu)點,這些特點可以很好地彌補GNSS在惡劣環(huán)境下可視衛(wèi)星少、信號質(zhì)量差的不足。利用UWB的測距信息來增強GNSS定位,這樣不僅可以增加觀測值個數(shù),而且可以很好地改善位置精度因子(position dilution of precision,PDOP)值;利用GNSS信息也可以對UWB非視距誤差進行消除:因此本文對GNSS/UWB組合定位方法進行研究,以解決室內(nèi)外接合處的高精度定位問題[4]。
1 GNSS/UWB時空統(tǒng)一
GNSS和UWB作為2種定位技術,具有不同的時間、坐標系統(tǒng);因此在GNSS/UWB組合定位之前,應首先將GNSS、UWB傳感器進行時空基準統(tǒng)一。主要包括天線相位中心統(tǒng)一和時間系統(tǒng)統(tǒng)一。
1.1 GNSS/UWB天線相位中心統(tǒng)一方法
硬件連接方式如圖1所示。通過調(diào)節(jié)腳架使得圓水準氣泡居中,使GNSS接收機天線相位中心、UWB天線相位中心和基座的幾何中心位于同一條鉛垂線上。

圖1 GNSS/UWB天線相位中心統(tǒng)一
GNSS與UWB天線相位中心高差采用量取斜高的方式間接獲取。首先從GNSS天線橡膠護圈3次量取至UWB相位中心的距離,取平均值作為斜高,則GPS相位中心距UWB相位中心的高差

(1)
其中:hslant為測量的斜高;R0為天線半徑;h0為GPS天線的相位中心與幾何中心的高差。則
GNSS/UWB觀測值天線項改正計算公式為

(2)
式中:dant為觀測值的天線項改正;d為輸入的天線改正向量(包括3個分量);e為接收機概略位置到衛(wèi)星天線的單位方向向量(包括3個分量);el、A分別為衛(wèi)星的高度角和方位角。
1.2 GNSS/UWB時間同步方法
GNSS/UWB組合定位過程中要求GNSS時間系統(tǒng)與UWB時間系統(tǒng)高度統(tǒng)一[4]。利用NovAtel ProPak-V3型接收機進行實時觀測,通過實時偽距單點定位解算的接收機鐘差改正數(shù)獲得高精度接收機鐘時間。利用程序對電腦進行授時,即保證電腦的系統(tǒng)時間與GPS時同步;因此基于電腦時間系統(tǒng)的UWB時間系統(tǒng)也同GPS時保持一致。由于GNSS和UWB采樣率不同,則通過插值方式實現(xiàn)GNSS觀測時刻與UWB觀測時刻相對應。下文中靜態(tài)實驗和動態(tài)試驗對GNSS/UWB組合的時間同步要求不高,通過搜索與GNSS歷元最近的UWB歷元的方式進行時間上的匹配,這種近似算法造成的時間同步誤差值得日后深入研究。
本文GNSS觀測選用GPS、BDS雙系統(tǒng),而GPS、BDS擁有各自的時空基準;因此在解算時也應保證GPS、BDS時空基準統(tǒng)一[3]。對于空間基準,BDS采用的CGCS2000國家大地坐標系(China geodetic coordinate system 2000,CGCS2000),與GPS采用的WGS84坐標系最大差異為0.1 mm,在短基線相對定位來說可以忽略不計。對于時間基準,北斗時(BDS time,BDT)以國際單位制(Le Système international d’unités,SI)秒為基本單位,與GPS時(GPS time,GPST)一樣同屬于原子時(international atomic time,IAT),皆無閏秒,以GPS周和GPS周內(nèi)秒通過BDS導航電文播發(fā)。但BDT的起算歷元是2006-01-01T00∶00∶00(星期日)的協(xié)調(diào)世界時(coordinated universal time,UTC),BDT通過中國維持的協(xié)調(diào)世界UTC(NTSC)與國際UTC(NTSC)建立聯(lián)系,由于閏秒的影響,從1980-01-06—2006-01-01間共有正閏秒+ 14 s,所以BDT與GPST間相差14 s。則GPST與BDT的關系式為
GPST=BDT+UTC(USNO)-UTC(NTSC)+14 s。
(3)
2 GNSS/UWB組合定位模型
在多GNSS系統(tǒng)間以及GNSS與UWB時空基準統(tǒng)一的條件下可以對GNSS與UWB進行組合定位。在GNSS系統(tǒng)方面,由于本文采用GPS和BDS 2個系統(tǒng)的觀測數(shù)據(jù);因此應首先建立GPS/BDS組合相對定位模型。在此基礎上再結合UWB定位原理建立GNSS/UWB組合定位模型。由于GNSS與UWB屬于2類不同的傳感器,因此需要采用一定的方法對它們的觀測值進行定權[1]。
2.1 GNSS相對定位
測站i、j對GPS衛(wèi)星p線性化后的相位觀測方程[6]為


(4)
i、j 2站之間的站間相位單差方程為

(5)
當2測站同時對衛(wèi)星q進行觀測時,星間相位雙差方程為

(6)
同理,基于偽距的雙差方程可表示為

(7)
相對定位過程中,衛(wèi)星鐘差在單差過程中被消除,接收機鐘差在雙差過程中被消除。由于本文研究內(nèi)容針對短基線,則對流層和電離層影響可以忽略。
需要注意的是,因為GPS和BDS之間存在的時間系統(tǒng)偏差會在雙差過程中被消除,所以雙差后的觀測方程GPS與BDS是一致的[8];但由于GPS和BDS存在系統(tǒng)偏差,所以須在GPS、BDS中各選1顆參考衛(wèi)星做雙差解算。
2.2 UWB定位原理
脈沖超寬帶(impulse radio UWB,IR-UWB)在無線電通信、測距、定位等領域引起廣泛關注。IR-UWB定位方式一般有3種:基于到達角度的估計 (angle of arrival,AOA)、基于信號強度的估計(received signal strength,RSS)和基于到達時間的估計 (time of arrival/time difference of arrival,TOA/TDOA),而TOA/TDOA正是利用了IR-UWB極強的時間分辨率優(yōu)勢。本文利用這種方式實現(xiàn)IR-UWB定位[4]。基于TOA的定位原理也與GPS的偽距定位原理相近,即以各UWB基準站為圓心、以測距值為半徑畫圓,各圓的交點就是所要求取的未知點位置,如圖2所示。

圖2 TOA定位原理
UWB定位的非線性觀測方程[3]為

(8)
則

(9)
(10)
參數(shù)估計可采用擴展卡爾曼濾波法(extended Kalman filter,EKF)。
需要注意的是,受多徑效應、非視距傳播和多址接入等因素影響,UWB測距過程中會出現(xiàn)粗差[8];所以要通過的一定數(shù)學方法對異常值進行剔除。本文采用基于自回歸的卡爾曼濾波法對異常值進行剔除。這部分內(nèi)容并不是本文的主要關注點,在這里不再展開說明。
2.3 GNSS/UWB組合定位模型
在GNSS/UWB組合定位的過程中,移動站概略坐標由GNSS偽距單點定位獲取。若可見衛(wèi)星數(shù)過少將導致概略坐標困難。若能夠將UWB的觀測方程加入到GNSS觀測方程中,并將將UWB基準站看做偽衛(wèi)星,可以增加有效觀測值個數(shù),同時也可以改善3位位置精度因子(PDOP)。由于UWB定位系統(tǒng)僅有一個接收端,所以在相對定位過程中不存在站間差分的問題[2];而且UWB采用雙向測距的方式來消除對時鐘同步的要求,因此也無需進行類似于衛(wèi)星導航系統(tǒng)的星間差分的UWB基站間差分。根據(jù)前面公式可反演得到GNSS/UWB線性化后的觀測模型為

(11)
參數(shù)解算方法可選擇最小二乘法,選擇p號GPS衛(wèi)星和s號BDS衛(wèi)星為參考衛(wèi)星,根據(jù)最小二乘原理得X=(BTPB)-1BTPL,求得坐標改正數(shù)及單差模糊度浮點解。其中:

(12)
P為權陣,由赫爾默特方差估計方法獲得。
此時模糊度為單差模糊度,通過投影矩陣投影成雙差模糊度,再用LAMBDA方法進行模糊度固定。這不是本文的研究重點,在這里不進行討論。
2.4 GNSS/UWB觀測值定權方法
由于2種設備觀測精度不同,需要對來自不同傳感器的觀測值進行定權。隨機模型驗后估計方法主要包括:赫爾默特估計(方差估計法)、方差協(xié)方差估計法、最小范數(shù)二次無偏估計法、最優(yōu)不變二次無偏估計法[8]。這里采用赫爾默特方差估計方法進行定權,其簡要公式為:
1)采用經(jīng)驗值對GNSS/UWB組合定位系統(tǒng)的
各個觀測量的權重賦初值P1、P2。
3)按赫爾默特估算公式進行第1次分量估計為

(13)
式中:

(14)


其中,N=N1+N2,N1、N2分別為2系統(tǒng)觀測方程形成的方法方程系數(shù)矩陣。

(15)
3 實驗結果與分析
為了驗證GNSS/UWB在無縫定位應用中的定位性能,分別設計了室內(nèi)外結合處靜態(tài)定位實驗和室內(nèi)外接合處動態(tài)定位實驗。
3.1 靜態(tài)定位實驗
2014年5月23日,在遼寧工程技術大學測繪樓西側雨搭下利用TrimbleR8型GPS接收機和UWB設備進行靜態(tài)定位,觀測時長約為40min。GNSS單系統(tǒng)、UWB單系統(tǒng)和GNSS/UWB組合系統(tǒng)的觀測值數(shù)量及GNSS單系統(tǒng)、GNSS/UWB組合系統(tǒng)的相對位置精度因子(relativeDOP,RDOP)值如圖3所示,其中GNSS/UWB組合系統(tǒng)的權重采用赫爾默特方差估計方法進行確定,且每一歷元均重新進行確定。設置低截止高度角(20°)。隨著衛(wèi)星數(shù)的增加,GNSS單系統(tǒng)的高程相對位置精度因子VRDOP(verticalrelativeDOP)值和平面相對位置精度因子HRDOP(horizontalrelativeDOP)值減小;但對于GNSS/UWB組合系統(tǒng)卻沒有較大變化。3個UWB基準站與移動站幾乎位于同一水平面上,因此UWB的加入使HRDOP值較VRDOP值有更加顯著的提高。

圖3 觀測值數(shù)量和RDOP值
解算結果如圖4、圖5所示,縱坐標為誤差,單位為m,橫坐標為歷元個數(shù)。GNSS平面精度0.3m左右。采用組合定位,RMS分別達到2mm和6mm。其中坐標真值由徠卡TS06高精度全站儀(測距精度1.5mm)測得。由于3個UWB基準站基本在同一水平面上,因此高程精度沒有提高;在這里只比較平面精度。
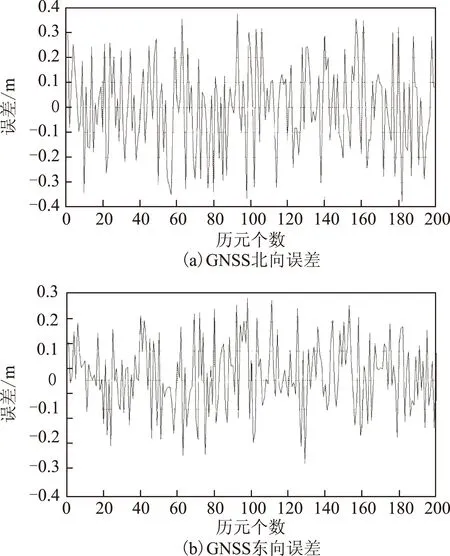
圖4 靜態(tài)GNSS解算結果
3.2 動態(tài)定位實驗
利用SOUTHS86型衛(wèi)星接收機和UWB設備進行室內(nèi)外動態(tài)定位實驗,如圖6、圖7所示。

圖5 靜態(tài)GNSS/UWB解算結果

圖6 實驗場景與軌跡

圖7 動態(tài)定位實驗結果
由圖中可知,3個UWB基準值位于一樓大廳,樓西側80m處設立GNSS基準站。移動站設有衛(wèi)星接收機和UWB設備,移動站移動真實軌跡轉點由徠卡TS06高精度全站儀測得。利用程序計算點到軌跡的垂直距離,經(jīng)統(tǒng)計分析可知:在室外部分GNSS定位的成功率為88%,平均偏移量為7.8cm,最大偏移量為20cm;在室內(nèi)部分UWB定位的成功率為99.4%,平均偏移量為5.7cm,最大偏移量為17cm。放大部分為結合處區(qū)域,其中規(guī)則直線為真實軌跡,曲折直線為實際軌跡。該區(qū)域GNSS信號受到嚴重遮擋,有效歷元數(shù)為10,后期6個歷元僅接收4顆衛(wèi)星(2顆GPS、2顆BDS)。由于模糊度固定暫時局限于系統(tǒng)內(nèi)部,只形成2個雙差方程。此外UWB信號也受到玻璃門折射或反射影響。經(jīng)分析,GNSS/UWB組合能夠進行有效定位的歷元數(shù)為10,成功率為62.5%,平均偏移量為17.7cm,最大偏移量為0.4m。
由于實驗條件有限,實驗小車在行進過程中并沒有嚴格按照規(guī)定線路推進,存在3cm左右的粗差,因此定位結果偏差并沒有呈現(xiàn)較好的變化趨勢,組合系統(tǒng)的精度不僅局限于此。
4 結束語
為有效提高室內(nèi)外接合處復雜環(huán)境下的定位精度,本文設計了GNSS/UWB緊組合定位系統(tǒng),分析了GNSS接收機和UWB的時空統(tǒng)一方法、GNSS/UWB組合定位模型,并采用赫爾默特方差估計分類法對觀測值定權。實驗結果表明,采用GNSS/UWB組合定位方法可有效提高室內(nèi)外無縫定位精度。其中室內(nèi)外靜態(tài)無縫定位精度可達cm級,動態(tài)定位精度可達亞dm級。
[1] 雷鳴.GNSS組合定位算法研究及實現(xiàn)[D].成都:電子科技大學,2009:15-64.
[2] 高星偉,過靜珺,程鵬飛.基于時空系統(tǒng)統(tǒng)一的北斗與GPS融合定位[J].測繪學報,2012,41(05):743-748.
[3] 劉季,張小紅.GPS/BD組合導航定位試驗和精度分析[J].測繪信息與工程,2012,37(4):1-3.
[4] 肖竹.脈沖超寬帶定位技術綜述[J].中國科學,2009,39(10):1112-1114.
[5]MAHFOUZMR,ZHANGC,MERKLBC,etal.Investigationofhigh-accuracyindoor3-DpositioningusingUWBtechnology[J].IEEETransactionsonMicrowaveTheoryandTechniques,2008,56(6):1316-1330.
[6] 李征航.GPS測量與數(shù)據(jù)處理[M].武漢:武漢大學出版社,2005:165-169.
[7] 王潛心,陳正陽,唐利民.基于相對定位模型的GPS-Galileo組合定位研究[J].測繪科學,2009,34(1):63-65.
[8]LIUJ,GEM.PANDAsoftwareanditspreliminaryresultofpositioningandorbitdetermination[J].WuhanUniversityJournalofNaturalSciences2003,2B(8):603-609.
[9]CHEHRIA,F(xiàn)ORTIERP,TARDIFPM.UWB-basedsensornetworksforlocalizationinminingenvironments[J].AdHocNetworks,2009,7(5):987-1000.
[10]KHAWAJAW,SASAOKAK,,GUVENCI.UWBradarforindoordetectionandrangingofmovingobjects:anexperimentalstudy[J].InternationalWorkshoponAntennaTechnology(iWAT),2016,7(5):102-105.
Method of indoor and outdoor integrated precise positioning based on GNSS/UWB
HAO Yushi1,XU Aigong1,SUI Xin1,2
(1.School of Geomatics,Liaoning Technical University,F(xiàn)uxin,Liaoning 123000,China;2.Research Center of GNSS,Wuhan University,Wuhan,Hubei 430079,China)
In order to improve the positioning capability and precision of the indoor and outdoor junction in seamless positioning,the paper combined the sensors of GNSS and UWB,used GNSS and UWB spatio-temporal reference reunification process on the formation of tightly integrated GNSS and UWB positioning model,and adopted Helmert variance estimation method to determine the weight of the two sensors.Finally,the combined positioning model was verified by a dynamic and static positioning experiment of the junction between indoor and outdoor.Result showed that the planar accuracy of the indoor and outdoor static positioning could reach centimeter level,and the planar accuracy of the indoor and outdoor real-time dynamic positioning could reach sub-decimeter level based on GNSS/UWB positioning system.
GNSS;UWB;integrated positioning;high-precision
2016-02-18
國家863計劃項目(2014AA123101);國家自然科學基金項目(41501504);遼寧省教育廳創(chuàng)新團隊項目(LT2015013);遼寧省教育廳科學研究一般項目(L2013141);地理空間信息工程國家測繪地理信息局重點實驗室經(jīng)費資助項目(201522)。
郝雨時(1990—),男,遼寧錦州人,博士研究生,研究方向為室內(nèi)外高精度無縫定位。
徐愛功(1963—),男,山東日照人,博士,教授,研究方向為全球衛(wèi)星定位系統(tǒng)與地理信息系統(tǒng)及智能交通系統(tǒng)的集成與應用。
郝雨時,徐愛功,隋心.GNSS/UWB高精度室內(nèi)外組合定位方法[J].導航定位學報,2016,4(4):17-23.(HAO Yushi,XU Aigong,SUI Xin.Method of indoor and outdoor integrated precise positioning based on GNSS/UWB[J].Journal of Navigation and Positioning,2016,4(4):17-13.)
10.16547/j.cnki.10-1096.20160404.
P228
A
2095-4999(2016)04-0017-07
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
