基于雷達影像的船舶轉向角計算方法*
2016-12-30 01:46:07蔣仲廉初秀民
武漢理工大學學報(交通科學與工程版) 2016年6期
鐘 誠 蔣仲廉 初秀民 羅 翊
(武漢理工大學智能交通系統研究中心1) 武漢 430063) (國家水運安全工程技術研究中心2) 武漢 430063) (武漢理工大學物流工程學院3) 武漢 430063)
基于雷達影像的船舶轉向角計算方法*
鐘 誠1)蔣仲廉1, 2)初秀民1, 2)羅 翊3)
(武漢理工大學智能交通系統研究中心1)武漢 430063) (國家水運安全工程技術研究中心2)武漢 430063) (武漢理工大學物流工程學院3)武漢 430063)
航行狀態信息的實時、精確感知是實現船舶姿態控制與自主航行的基礎與前提.采用Otsu算法對船載雷達圖像進行預處理,通過霍夫變換獲取雷達圖像直線分量,求解連續圖像間的旋轉角度差值,提出了一種基于雷達影像的船舶轉角度計算新方法.經實驗數據驗證,由此獲得的船舶轉向角誤差不隨時間而疊加,且最大誤差在4%之內.基于雷達影像的船舶轉向角計算方法可為其航行制導控制、算法改進提供支撐.
雷達影像;轉向角;預處理;霍夫變換
0 引 言
實時精確感知航行姿態信息,包括航向角(yaw)、橫傾角(roll)和縱傾角(pitch)等,是實現船舶姿態控制與自主航行的前提.目前,國內外關于船舶航行姿態信息的感知主要通過磁傳感器、慣導系統、GPS系統或者視覺成像傳感器獲取[1-2].高精度慣性導航傳感器可實現船舶狀態信息的連續測量,但由微機電系統(MEMS)陀螺儀所獲取的載體角運動和線運動信息誤差存在隨時間累積發散的特點[3],非平穩隨機噪聲一定程度上制約了信息精度[4];GPS航行狀態感知精度受制于基線長度、天線布局和信號強度等因素,多用于大中型水面艦艇[5-7];基于視覺成像傳感器的工作原理是,解算連續拍攝圖像中標志點模板的姿態變化(如單/雙目視覺姿態判定方法[8-9]),獲取航行姿態信息.
船載雷達是船舶安全航行的常規設備之一,可在線實時獲取通航環境信息,輔助實現船舶的導航控制、定線航行、自主避碰等.基于高分辨率雷達回波影像的科學研究,已在海浪觀測、溢油監測、船舶目標檢測與跟蹤等領域廣泛開展[10-17].近年來,小波變換、霍夫變換、邊緣檢測等圖像處理技術在雷達影像上得到了廣泛應用.陳鷹等[18]將小波變換用于雷達影像的邊緣檢測,以實現圖像的匹配及校準;Liu等[19]通過霍夫變換方法,實現了雷達影像中岸線橋梁目標的自動提取,為雷達影像與電子航道圖的信息融合奠定了基礎;針對合成孔徑雷達(SAR)影像,符思濤等[20]利用投影面積歸一化和極化方位角移動補償技術對地形引起的輻射畸變進行糾正;程江華等[21]采用形態學變換結合多閾值Otsu算法,實現了各種外界干擾下的道路交叉口檢測和識別方法.
文中借助Lowrance 4GTM雷達影像(見圖1),采用Otsu算子、霍夫變換等圖像處理技術,提出了一種船舶偏向角計算方法.通過與船舶雷達數據對比,驗證了方法的可行性.船舶偏向角算法可與船舶其他傳感器信息融合,實現船舶航行狀態信息的精確控制與感知,具有較強的可拓展性.

圖1 船載雷達圖像
1 轉向角計算方法
船舶航行或轉向時,連續雷達回波圖像不僅包含航行角度上的旋轉差異,掃描內容也發生了變換.仿射變換、角點特征等常用的圖像旋轉角度計算方法,在連續雷達圖像分析中并不適用.文中采用形態學的方法對雷達影像進行預處理,對預處理后的圖像進行霍夫變換提取其直線分量,通過最大直線分量間的角度偏轉確定來得到船舶的轉向角.其流程圖見圖2.

圖2 船舶偏轉角計算流程圖
2 雷達影像預處理技術
考慮到中段截取的雷達影像中存在著大量的干擾信息,文中采用Otsu算法、圖像腐蝕和膨脹、連通區域提取,實現中段雷達圖像的預處理.
2.1 圖像二值化
采用自適應Otsu算法對圖像進行二值化操作.Otsu算法是一種基于自動確定閾值的圖像分割方法[22].該方法將圖像分為2個(前景、背景)圖像;根據灰度出現概率計算最佳的閾值,適用于圖像灰度多峰值的情況,且操作簡單.文中借助Otsu算法實現了雷達圖像的二值化,見圖3.

圖3 二值化處理前后雷達圖像對比
2.2 圖像的腐蝕和膨脹
腐蝕和膨脹是數學形態學中的基本操作,其目的是濾除噪聲,實現圖像分析和識別;而后進行開(open)、閉(close)、擊中擊不中運算(hit or miss transformation,HMT).在執行腐蝕和膨脹運算后,邊界直線更為平滑,同時圖像中的細小縫隙也會被填充滿,為后續連通區域的提取奠定基礎.
2.3 連通區域提取
連通域是指在一定數量的像素在特定的關聯度上可以劃歸為統一區域的像素[23].連通準則主要有3種:4鄰接、8鄰接及混合鄰接,具體方法為:分析每個前景像素,如果其四周有與之灰度相同的像素,則判定四周與檢測點相同的像素處于同一個鄰域,進行標記;之后,將統計的連通域進行排序,保留較大、刪除較小聯通域,見圖4.
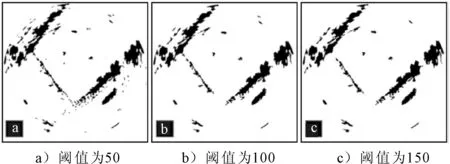
圖4 不同閾值雷達影像連通區域提取結果
基于形態學的雷達影響預處理方法具有算法簡單、易于實現等特點.對于雷達影像中的目標識別,設計不同的結構元素,開閉運算的選擇順序至關重要.趙松等[24]提出了結合小波變換和形態學的去噪方法,實現了雷達圖像的去噪處理;王海虹等[25]建立了基于形態學的圖像邊緣檢測方法,實現了對激光成像雷達圖像的邊緣提取.文中采用了4領域的開閉運算方法,在平滑區域邊界的同時有效剔除區域內空洞;在形態學處理的基礎上,提取圖像中的連通區域,并剔除結果中像素面積較小的噪聲區域.
3 雷達影像轉向角計算方法
在雷達影像預處理的基礎上,采用霍夫變換(Hough transform)進行直線提取;基于直線提取結果,對雷達影像進行方向標定;最后,由雷達影像序列的方向差異獲取船舶的轉向角.
3.1 Canny算子邊緣檢測
相對于其他邊緣檢測方法,Canny算子邊緣檢測的優越之處在于靈活的閥值選擇,允許采用不同的閾值對同一副圖像的明顯與非明顯邊緣進行檢測,進而自動判定明顯與非明顯邊緣相連才將弱邊緣包含于圖像之中[26].采用Canny算子進行檢測不致于丟失虛弱邊緣的信息,較易檢測出真正的弱邊緣,且具有較強的抑制噪聲能力.總體上,盡管部分邊緣被平滑造成了邊緣的部分丟失,但基于Canny算子的邊緣檢測方法能準確地提取出劣化圖像邊緣,實用性較強,見圖5.
3.2 霍夫變換
霍夫變換由于其良好的抗噪聲性能,以及對部分遮蓋現象的不敏感等特性,在模式識別領域中得到廣泛的應用.例如,直線檢測、圓或橢圓的檢測、任意形狀區域的邊緣提取、二維或三維運動參數的估計等[27].其基本原理是將直線從x-y坐標軸空間轉換為a-b坐標軸空間形成峰值,從而將檢測任意形狀的問題轉化為統計峰值問題.通過對參數的累加再進行反變換,以實現平面域線段及形狀區域的檢測.
3.3 方向標定
在雷達影像中,由于噪聲的影響、自然岸線的彎曲,一條線段會斷裂為多條不連續線段.因此,對提取到的相近短線段進行合并處理;當合并得到的線段長度較短(小于閥值)時,舍棄線段.圖6a)為直線合并的距離閥值10,直線長度閾值10時的提取結果.將直線長度閥值提升至20,30,40時,結果分別見圖6b)~d).對比上述結果可知:當長度閥值過大時,容易造成直線信息丟失,過小則會增添不必要的冗余直線信息.將合并距離閥值提升至20,30,40時,直線提取結果見圖6e)~h),6i)~l),6m)~p).
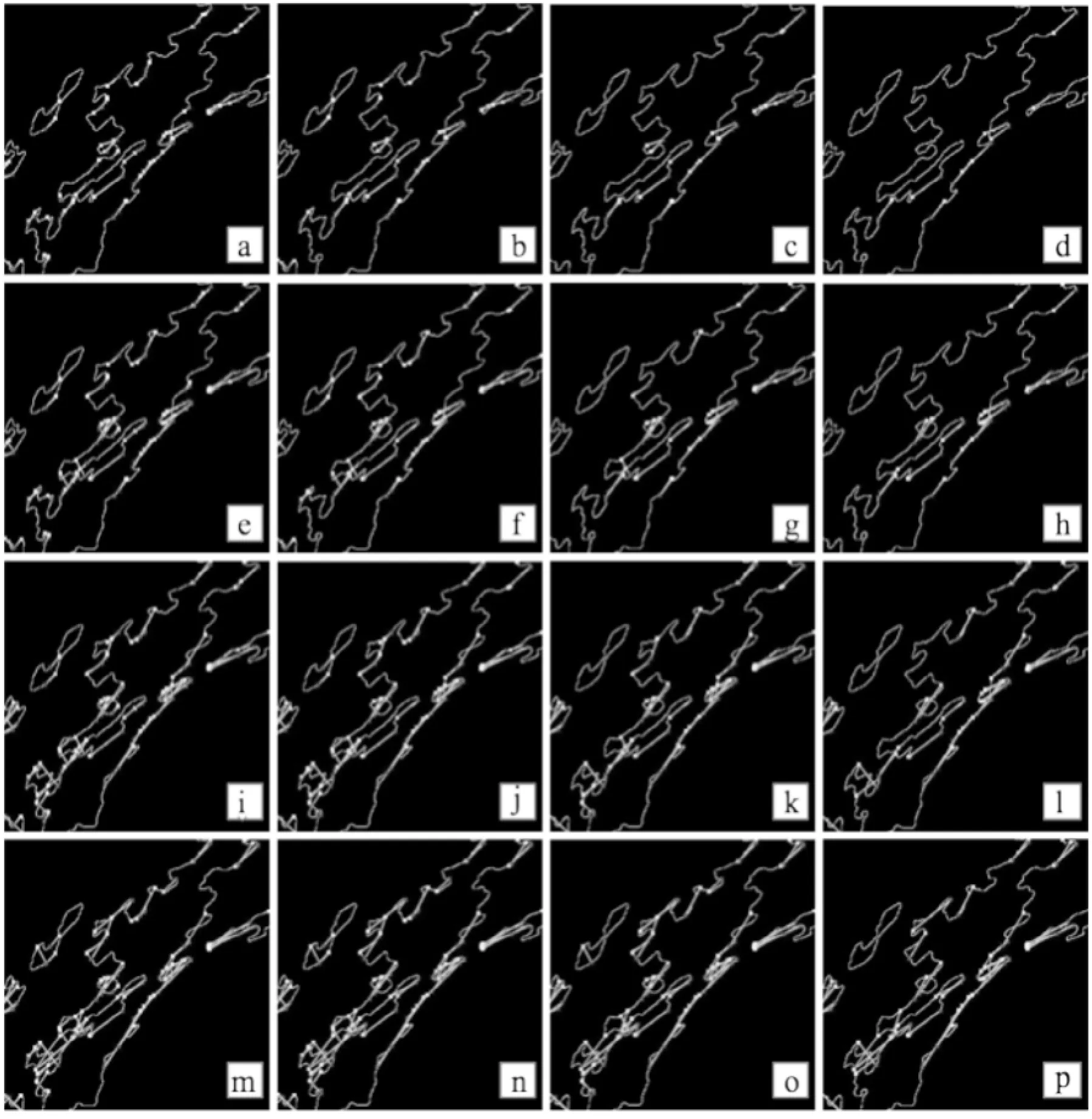
圖6 不同閥值下雷達圖像直線提取結果
對于已獲取的直線線段,統計線段方向信息及長度信息,將統計結果中的具有最長分量的方向標定為圖像方向,見圖7.實線①為最長直線分量,②為可能直線分量.
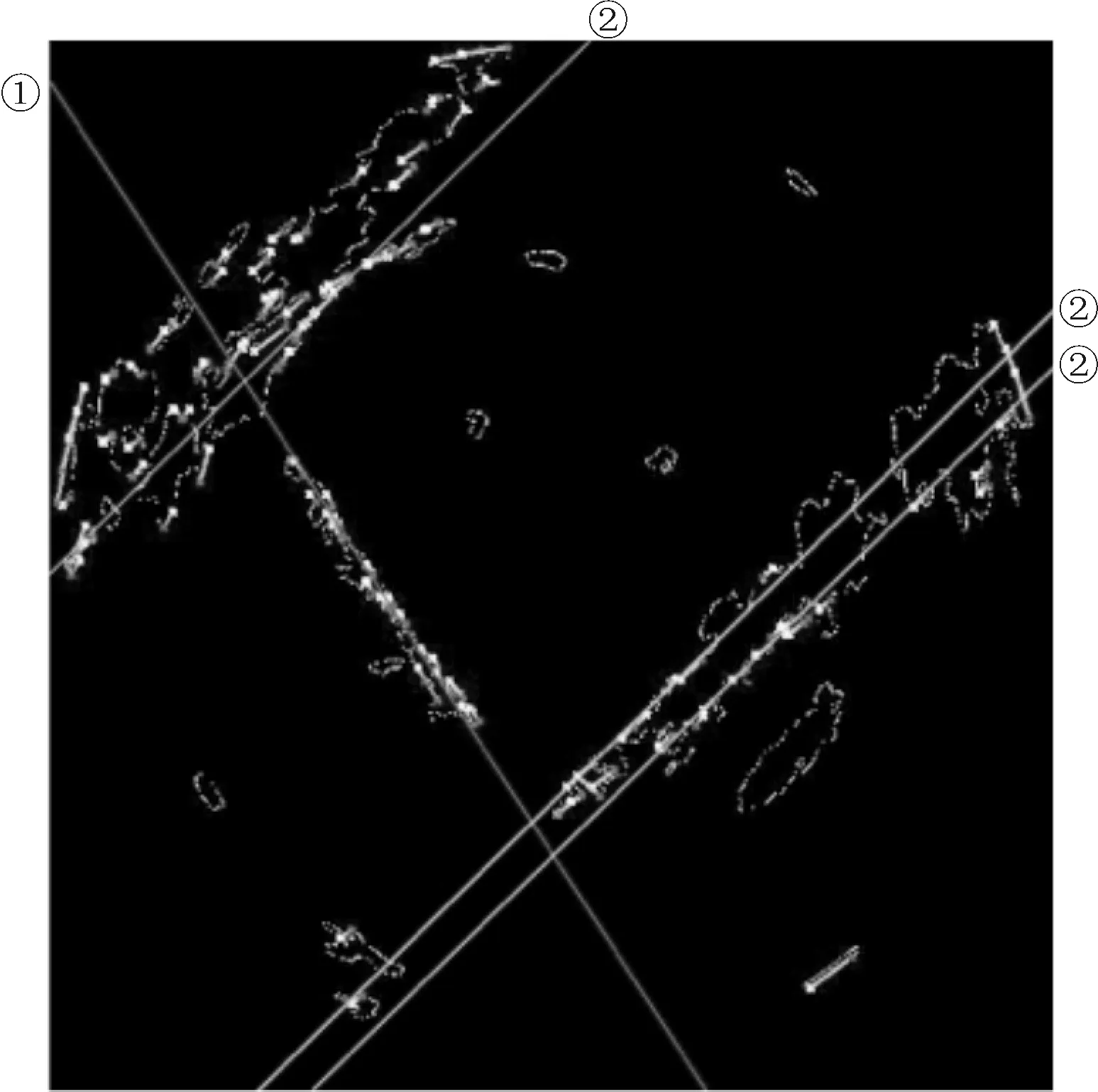
圖7 雷達圖像方向標定
4 實驗結果及分析
以武漢長江二橋處實測船載雷達所測(型號:Lowrance 4GTM)影像為驗證素材,采用上述方法計算船舶航行偏向角,并與實際雷達數據進行對比,分析誤差來源,驗證方法可行性.4個雷達圖像采集點分布于長江二橋上、下游,每個采集點選取18張圖像(共計72張雷達圖像)作為算法驗證素材;圖像采樣間隔為2 s,雷達轉向速率為5°/2 s.
合并相鄰直線、直線提取中長度閥值選定對于最終方向標定存在影響.表1列出了長度閾值30時的直線提取部分結果;圖8為不同閥值下船舶轉向角計算值隨時間的變化過程.實驗分析表明,當閥值取選取低于20時,雷達圖像中出現較多噪聲線段,試驗結果與真實轉向角差值過大;當閥值選取高于40時,圖像中形成的點簇較少,無法獲取足夠有效信息;當閥值選取為30左右時,效果較為理想,船舶轉向角計算結果與實際結果較為吻合,且最大誤差在0.2°(4%)之內.

圖8 不同閥值下船舶偏轉角計算值隨時間變化過程
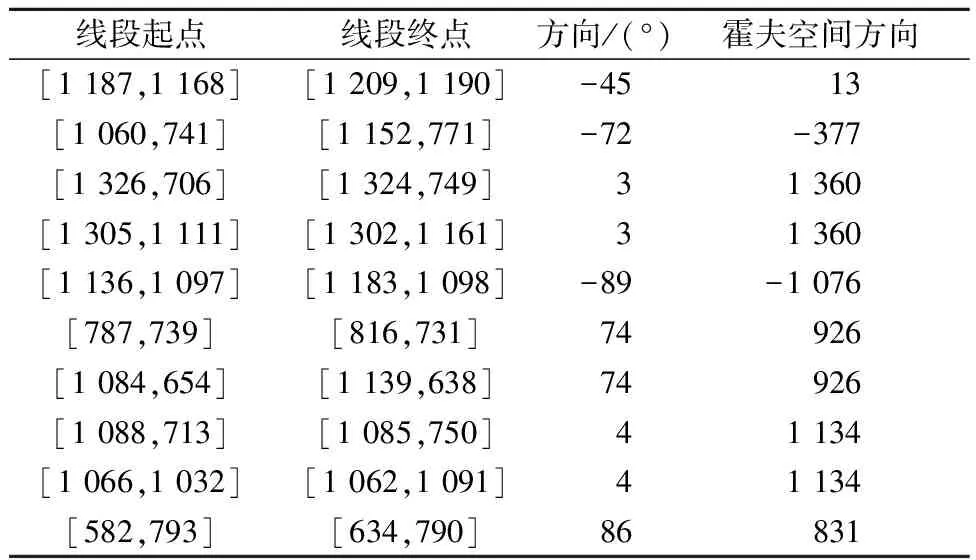
線段起點線段終點方向/(°)霍夫空間方向[1187,1168][1209,1190]-45 13[1060,741][1152,771]-72-377[1326,706][1324,749]31360[1305,1111][1302,1161]31360[1136,1097][1183,1098]-89-1076[787,739][816,731]74926[1084,654][1139,638]74926[1088,713][1085,750]41134[1066,1032][1062,1091]41134[582,793][634,790]86831
雷達影像采集過程受波、流擾動作用影響;其次,雷達圖像預處理、直線提取中引起的誤差也不可避免.由實驗結果分析可知:長度閾值等于30時,平均誤差值約0.04°(小于1%,標準差為0.18),船舶偏向角算法精度較高.
5 結 束 語
基于船舶船載雷達影像,采用圖像處理的方法,實現了雷達圖像的預處理、雷達方向標定,提出了一種船舶航行偏向角計算新方法,并與船舶實際轉向角進行了算法驗證和誤差分析.實驗結果表明,算法獲得的船舶偏轉角計算值與實際數據較為吻合;最大誤差為0.2°(4%范圍內),且不隨時間累積.針對Lowrance 4GTM雷達掃描圖像,通過選取不同霍夫變換閥值,分析了船舶轉向角計算值的差異;經過取值對比,將直線長度閥值取為30.對于不同類型的雷達影像,建議根據數據采集環境、具體研究目的,擇優選取圖像處理閥值.船舶航行狀態感知與其智能航行緊密相關.文中提出的船舶偏轉角計算新方法具有簡單易行的特點,可與船舶其他傳感器(慣導系統)進行信息融合,實現船舶航行狀態信息的精確感知與控制,具有較強的可拓展性和深入研究空間.
[1]柳晨光,初秀民,吳青,等.USV發展現狀及展望[J].中國造船,2014(4):194-205.
[2]張樹凱,劉正江,張顯庫,等.無人船艇的發展及展望[J].世界海運,2015,38(9):29-36.
[3]陳真義.小型水面無人船航行狀態感知系統研究[D].武漢:武漢理工大學,2014.
[4]陶浪舟,李凱,韓焱,等.基于磁傳感器組合的運動物體姿態解算[J].傳感器與微系統,2013,32(12):124-126.
[5]馬鯤.GPS船舶姿態測量技術研究[D].大連:大連海事大學,2004.
[6]張龍平.基于GPS的船舶實時姿態測量方法研究[D].青島:山東科技大學,2013.
[7]李矩海,李良雄,萬大斌.一種船舶姿態模型的確定方法[J].測繪通報,2001(6):22-24.
[8]劉柯.基于視覺圖像的船模運動姿態分析[D].無錫:江南大學,2015.
[9]李曉飛,宋亞男,徐榮華,等.基于雙目視覺的船舶跟蹤與定位[J].南京信息工程大學學報(自然科學版),2015(1):46-52.
[10]任福安,邵秘華,孫延維.船載雷達觀測海浪的研究[J].海洋學報,2006,28(5):152-156.
[11]楚曉亮,徐銘,王峰,等.利用X波段雷達提取海浪信息的分析[J].中國海洋大學學報(自然科學版),2011,41(5):110-113.
[12]IZQUIERDO P, SOARES C G, BORGE J C N, et al. A comparison of sea-state parameters from nautical radar images and buoy data[J]. Ocean Engineering,2004,31(17/18):2209-2225.
[13]馮海洋.基于航海雷達的海浪與溢油信息提取方法研究[D].大連:大連海事大學,2015.
[14]許海東,安偉,宋莎莎,等.船載溢油雷達監測技術研究[J].船海工程,2014,43(5):48-50.
[15]丁獻文,黃冬梅,鄒國良,等.面向船載雷達圖像的船只檢測方法[J].計算機工程,2011,37(3):161-162.
[16]JIANG Q S, AITNOURI E, WANG S R. Automatic detection for ship target in sar imagery using pnn model[J].Canadian Journal of Remote Sensing 2000,26(4):55-58.
[17]劉斌,黃韋艮,楊勁松,等.基于船載雷達圖像的海上船只檢測方法[J].海洋學研究,2009,27(4):33-38.
[18]陳鷹,葉勤,鐘志勇.基于小波變換的雷達與光學影像匹配算法研究[J].測繪學報,2000,29(3):245-249.
[19]LIU J, XIE L. Study of inland river maritime radar image gabor wavelet edge recognition based on direction adaptive[C].International Conference on Transportation Information and Safety,IEEE,2015.
[20]符思濤,李震,田幫森.全極化合成孔徑雷達影像地形糾正及其在雪冰制圖中的應用[J].中國圖象圖形學報,2014,19(1):150-157.
[21]程江華,高貴,庫錫樹,等.高分辨率SAR圖像道路交叉口檢測與識別新方法[J].雷達學報,2012(1):100-108.
[22]CHEN Q, ZHAO L, LU J, et al. Modified two-dimensional otsu image segmentation algorithm and fast realisation[J]. Iet Image Processing,2012,6(4):426-433.
[23]左文明.連通區域提取算法研究[J].計算機應用與軟件,2006,23(1):97-98.
[24]趙松,李慶,江漢紅,等.基于小波和形態學結合的雷達圖像降噪算法[J].船電技術,2012,32(7):1-3.
[25]王海虹,曾妮,陸威,等.基于小波變換和數學形態學的激光成像雷達圖像邊緣檢測[J].中國激光,2008,35(6):903-906.
[26]王小俊,劉旭敏,關永.基于改進Canny算子的圖像邊緣檢測算法[J].計算機工程,2012,38(14):196-198.
[27]邱桑敏,夏雨人.一種快速霍夫變換算法[J].計算機工程,2004,30(2):148-150.
Novel Calculation Method of Deviation Angle of Ship Based on Radar Images
ZHONG Cheng1)JIANG Zhonglian1,2)CHU Xiumin1,2)LUO Yi3)
(IntelligentTransportSystemsCenter,WuhanUniversityofTechnology,Wuhan430063,China)1)(NationalEngineeringResearchCenterforWaterTransportSafety,Wuhan430063,China)2)(SchoolofLogisticsEngineering,WuhanUniversityofTechnology,Wuhan430063,China)3)
It is of vital importance to obtain accurate and real-time navigation information for the attitude control and autonomous navigation of ship. A novel calculation method of deviation angle of ship based on radar images is proposed. Linear components are extracted from the radar images sequence, by which the angle of deviation can be deduced. The comparison of calculations and experimental data indicates that the error would not be accumulated with the time and its maximum falls in 4%. The present method provides a framework for the future advancement of attitude and navigation control algorithm of ship.
radar images; angle of deviation; pretreatment; Hough transform
2016-11-13
*國家自然科學基金項目(61273234)、武漢理工大學自主創新研究基金項目(2016IVA097)資助
U666.1
10.3963/j.issn.2095-3844.2016.06.009
鐘誠(1987—):男,博士生,主要研究領域為船舶控制與智能仿真技術
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09