基于BELBIC和FNN的球磨機解耦控制研究
2016-12-29 03:39:05楊國亮朱松偉
東北師大學報(自然科學版) 2016年4期
楊國亮,錢 亮,朱松偉
(江西理工大學電氣工程與自動化學院,江西 贛州 341000)
基于BELBIC和FNN的球磨機解耦控制研究
楊國亮,錢 亮,朱松偉
(江西理工大學電氣工程與自動化學院,江西 贛州 341000)
針對球磨機系統控制過程中存在的多變量、強耦合、模型時變性的特點,提出了基于大腦情感智能控制器(BELBIC)和模糊神經網絡(FNN)解耦的復合控制方案.利用模糊神經網絡的自適應學習能力設計了球磨機系統解耦器,有效地消除了球磨機系統耦合現象,在此基礎上,設計了大腦情感學習智能控制模型.仿真實驗表明,本文提出的控制方案優于傳統的解耦控制方法,能較好地解決球磨機強耦合問題,且具有較好的魯棒性.
大腦情感學習智能控制;球磨機;模糊神經網絡;解耦控制
0 引言
鋼球磨煤機是火電廠等用煤企業常用的大型輔助設備,其耗電量大且是一個非線性、大滯后、大慣性、強耦合和具有多種不確定性擾動的多變量對象,難以使用常規的控制方法實現其自動控制.若長時間采用人工經驗的方法、手動調整相關變量的方法控制球磨機系統的運行,則容易出現鋼筒內載煤量異常、原煤煤粉泄漏和鋼筒出入口溫度超標等事故.并且不能夠使球磨機處于最佳狀態下運行,致使球磨機電能消耗大大增加,造成不必要的經濟損失.
1995年Harry Nyquest提出了逆奈奎斯特陣列法,文獻[1]將此法用于球磨機控制系統中是把軸瓦振動的垂直分量表征磨煤機內存煤量,這樣將給煤回路近似為一個單回路系統,因而可用單變量的方法設計,對磨煤機出口溫度和入口負壓進行解耦設計,用熱風門控制出口溫度、由溫風控制入口負壓.Takagi和Surgeons提出基于標準模型的模糊神經網絡,文獻[2]將模糊神經網絡在應用與球磨機的控制上也有很大的成效,能夠適應球磨機的運行工況的變化而引起的動態特性的變化,因為神經網絡具備強大的學習能力及對外界環境優秀的適應能力,并且能夠對非線性函數進行逼近且不依賴準確的數學模型.所以神經網絡控制能夠在球磨機的控制中起到一定的作用和效果.
1 大腦情感學習智能控制模型
大腦情感學習模型(BEL)是在模擬了杏仁體和眶額皮質的情感信息交互方式的基礎上建立的[3],主要分為杏仁核和眶額皮質兩大主要組成部分.杏仁體是大腦對于情感進行加工記憶處理的重要部位,而眶額皮質重要部分主要處理來自丘腦的刺激,負責加工感官皮層和杏仁核提供的刺激.對每一組情感信號,BEL模型內部都會設立相對應的節點來處理.感官輸入信號SI(Sensory Input)作為BEL模型輸入信號是由感官輸入函數計算得出,而另一則獎勵(Reward)輸入信號由情感暗示函數計算得出.杏仁體的輸入信號主要來自感官輸入信號SI、獎勵信號REW以及來自丘腦(Thalamus)的信號Ath,眶額皮質所接收的刺激信號主要是感官皮質輸入信號SI和來自杏仁體的信號,而不會受到丘腦的信號刺激,BEL模型結構如圖1所示[3-4].

圖1 BEL大腦情感學習模型


(1)
杏仁體的輸出值Ai和眶額皮質的輸出值Oi分別為:
Ai=SIi·Vi,i=1,2,…,m,
Am+1=Ath·Vm+1;
(2)
Oi=SIi·Wi,i=1,2,…,m.
(3)
其中:Vi是對應節點Ai的權值,Wi是對應節點Oi的權值.
同時BEL模型以特殊的仿生學權值學習調整杏仁體和眶額皮質的連接權值,具體公式為:


(4)

(5)
其中:λv和λw分別為杏仁體和眶額皮質內的學習率;E′為不受丘腦組織刺激信號時的杏仁體部分的BEL模型輸出,表示為

(6)
由(4)式和(5)式可以看出,杏仁體內的權值調節律ΔVi的正負始終與SIi保持一致,說明杏仁體內的情感刺激信號只要經過學習之后,將被永久記憶、狀態始終被保持.然后眶額皮質內的權值調節步長ΔWi可取正負,表明眶額皮質在學習過程中起到了對杏仁體抑制和修正的功能,通過獎勵信號REW的指引作用減小了誤差,指引杏仁體向所預定的期望值進行學習[3].BEL模型的輸出為
(7)
C.Lucas等人于2004年將大腦情感學習模型引入智能控制領域[4],提出了基于大腦情感學習模型的智能控制器(Brain Emotional Learning Based Intelligent Controller,BELBIC).基于BELBIC已經被證明具有較強的魯棒性,并且能夠應用在多輸入、多輸出系統中,還具備簡單、快速響應和得到比較良好的控制品質的特點[4].使用BELBIC作為控制器的控制系統結構如圖2所示.圖中:y為系統的輸出;r為系統的輸入;REW為大腦情感學習智能控制器的情感獎勵輸入;SI為情感輸入;u為大腦情感學習智能控制器的輸出;e為系統控制誤差.
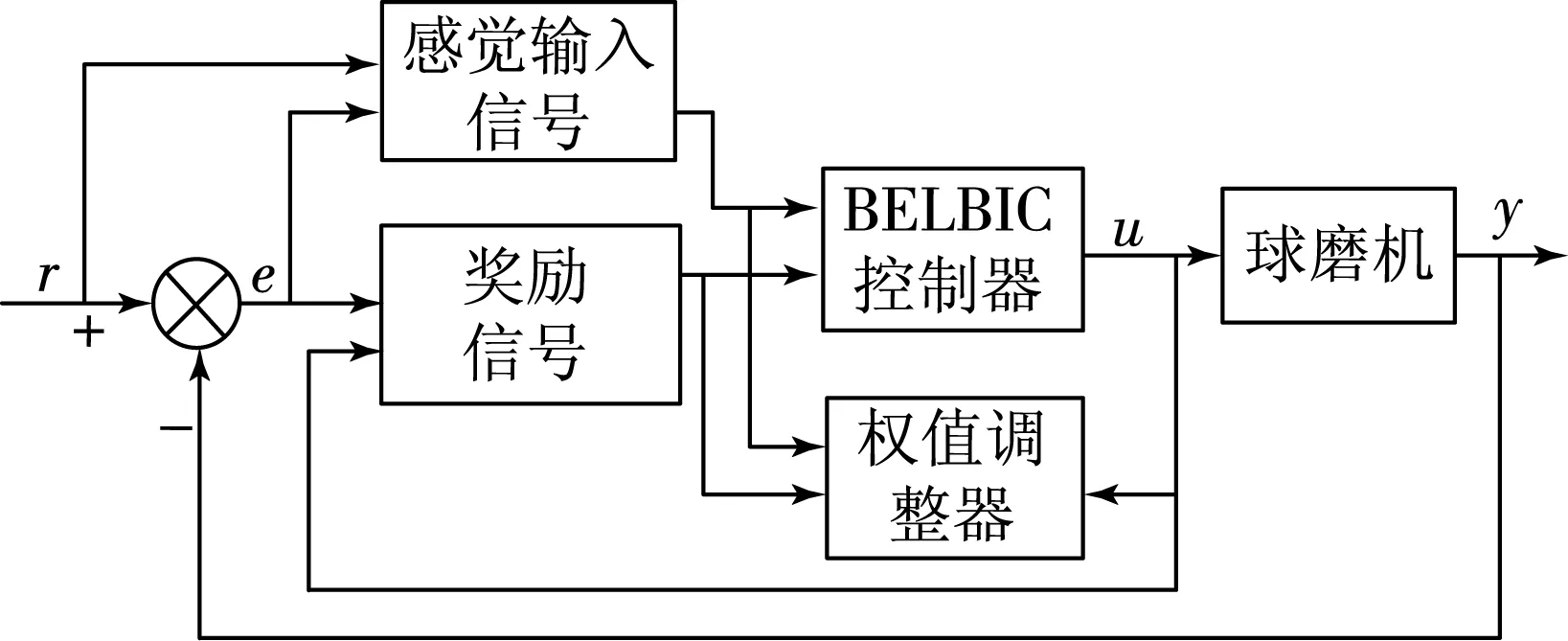
圖2 基于BELBIC的控制系統結構示意圖
獎勵信號REW可以設置為關于BEL模型輸出E、系統誤差e和系統輸出y的函數,表示為
REW=J(e,E,y).
(8)
同時感官輸入信號通過情感輸入函數得出,一般設置為關于系統輸入r、系統輸出y、系統控制誤差e的函數,即

(9)
為了簡單起見,本文選擇REW和SI信號為:
(10)

(11)
其中k1,k2,k3,k4,k5和k6為常數,可以事先設定.
2 基于BELBIC和模糊神經網絡的球磨機控制解耦系統設計

為了最大限度消除球磨機系統耦合現象,本文先利用模糊神經網絡(FNN)設計了球磨機控制系統解耦環節,然后設計了BELBIC球磨機控制器,系統結構如圖3所示.圖中:RM1和RM2為系統參考模型,t和p分別為球磨機出口溫度和入口負壓.在此解耦模型中每個FNN解耦器都是單輸出的,它只負責一個通道的解耦,因此它的結構比較簡單,另外,它的指標函數也非常簡單,因為總的目標函數已經被分解為單一的目標函數,而且不必再考慮解耦器本身各通道之間的交連問題[6-7].因此,采用分散解耦可以實現對多變量非線性系統的解耦.如圖3所示,球磨機控制系統只需要2個解耦補償器N1,2和N2,1,從而更加簡單的解決了強耦合的問題.
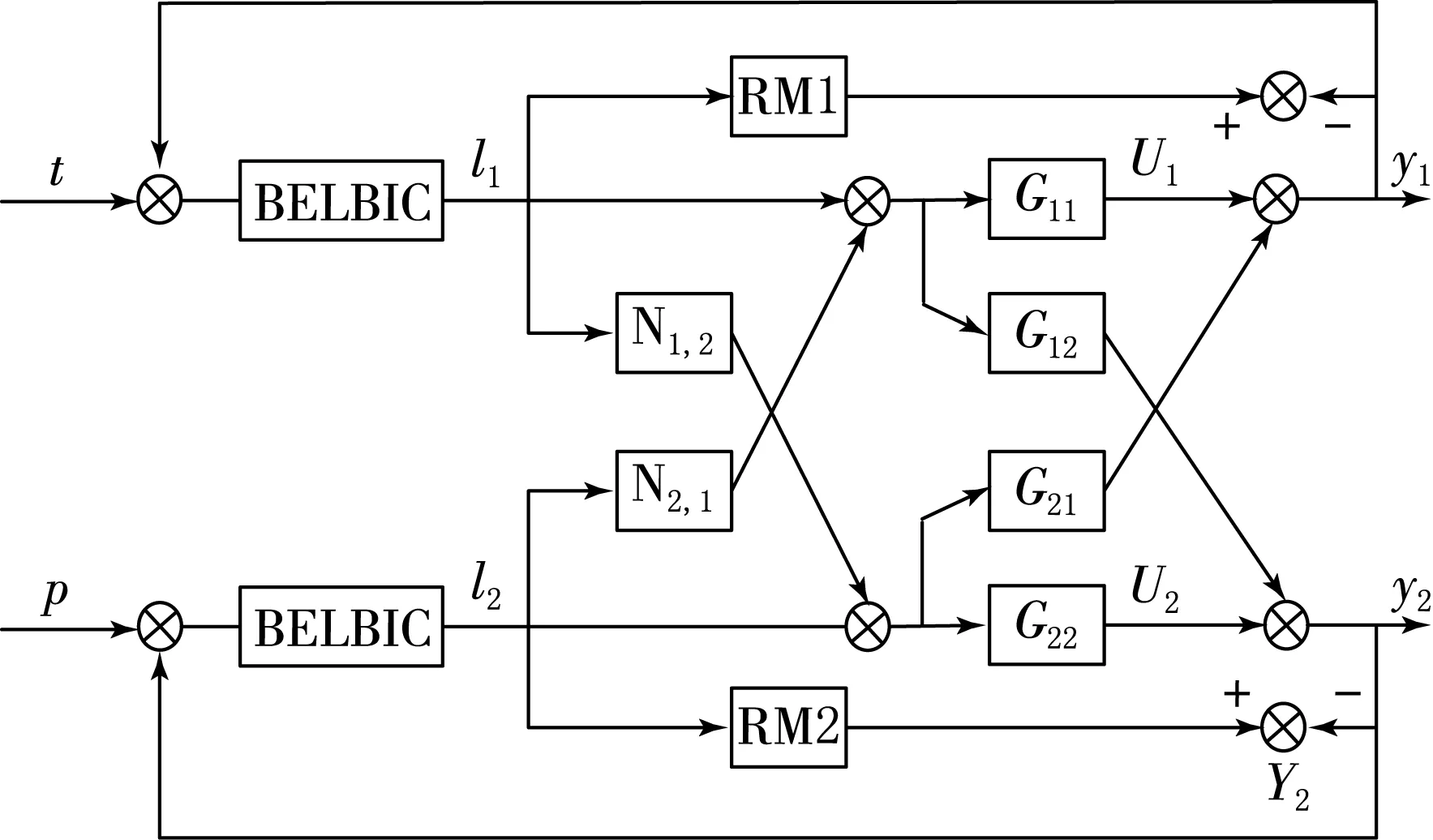
圖3 BELBIC和FNN的球磨機控制解耦模型
以FNN模型為例,來推導其用于解耦的具體算法.圖4為解耦器N1,2的結構圖.圖中:k1,k2為解耦器N1,2的輸入及其變化率的量化因子;k3為比例因子,圖中線框內為FNN.
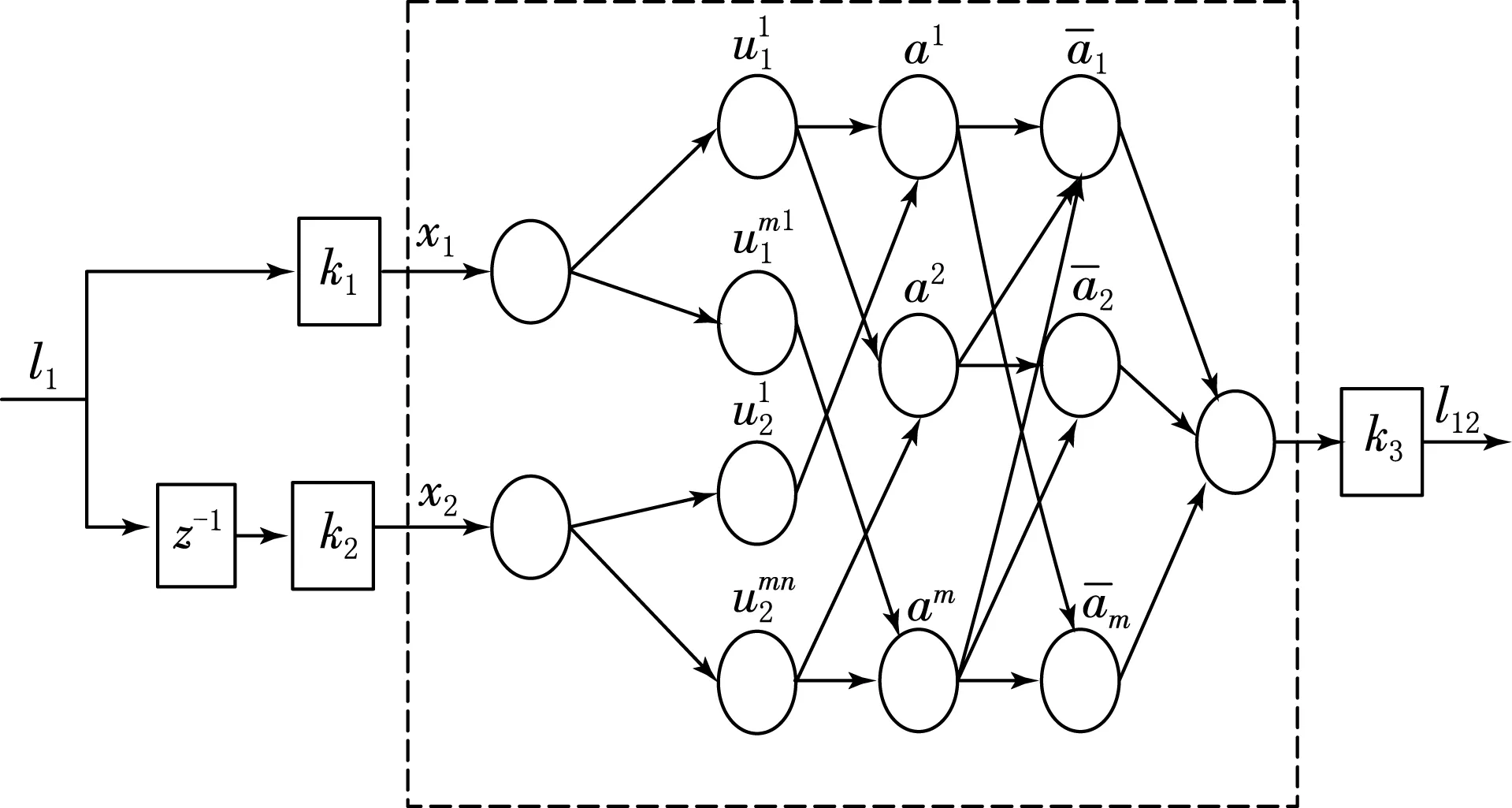
圖4 FNN解耦器N1,2的結構
根據上面的分析和FNN的特點可以得到FNN輸入層神經元數為2,輸出層神經元數為1.設每個輸入變量均被分為5個模糊子集,則第2層模糊層有10個節點,第3層的初始節點數為25個,第4層規則合并層的初始節點也為25個.
以FNN中N1,2和N2,1為例,根據FNN的運算過程并結合解耦過程可以得到:
因此有:
(12)
(13)
FNN中的規則數以及隸屬度函數中心(寬度)、權值等可通過梯度下降法或GA進行優化[8].整理以上推導的結果,可以得出求分散式FNN解耦器的步驟:
(1) 將FNN解耦器與球磨機出口溫度t和入口負壓p(被控對象)串聯;
(2) 去掉球磨機解耦系統的反饋和BELBIC控制器,使系統處于開環狀態;
(3) 設定FNN解耦器規則數及參數的初始值;
(4) 將球磨機出口溫度作為系統輸入且加入階躍響應信號,其他通道的輸入為0;
(5) 通過遺傳算法優化獲得通道1對于通道2的FNN解耦器的規則數及參數值,構建FNN解耦器N1,2,使通道2球磨機入口負壓p輸出y2等于期望輸出Y2;
(6) 將通道2的輸入加入球磨機入口負壓p作為階躍響應信號,通道1的輸入為0;
(7) 仿照(5)通過遺傳算法優化獲得通道2對于通道1的FNN解耦器的規則數及參數值,構建出FNN解耦器N2,1.
本文設計控制方案具體計算步驟如下:
(1) 設定BELBIC模型參數,并對其權值進行初始化;
(2) 根據(7)式計算BELBIC輸出;
(3) 計算解耦環節FNN輸出;
(4) 計算參考模型與球磨機系統模型輸出;
(5) 根據(4)和(5)式更新BELBIC權值;
(6) 重復(2)—(5)直至設定時間為止.
3 結果與分析
為了驗證基于大腦情感學習和模糊神經網絡的球磨機解耦控制系統的有效性,為了便于比較,同時采用了PID和FNN相結合的控制方案并進行了仿真實驗(文中簡稱PID+FNN解耦控制).利用文獻[5]給出的球磨機模型得到相應的傳遞函數進行仿真.
球磨機系統數學模型為
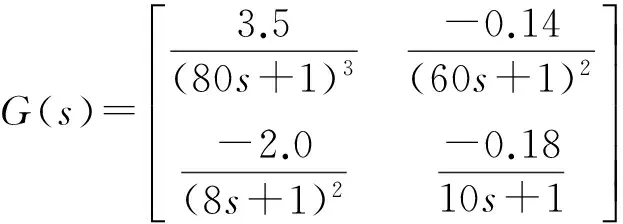

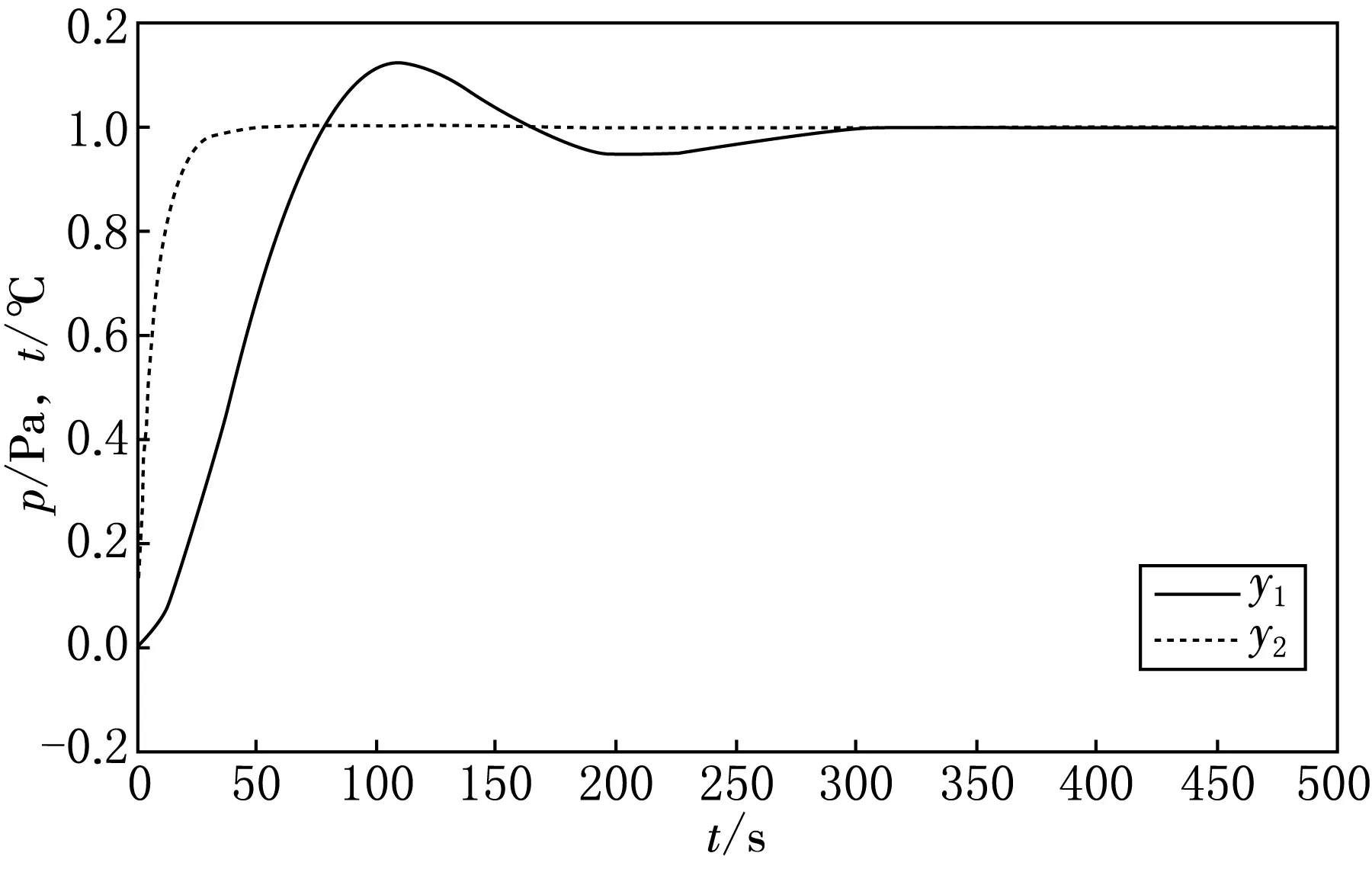
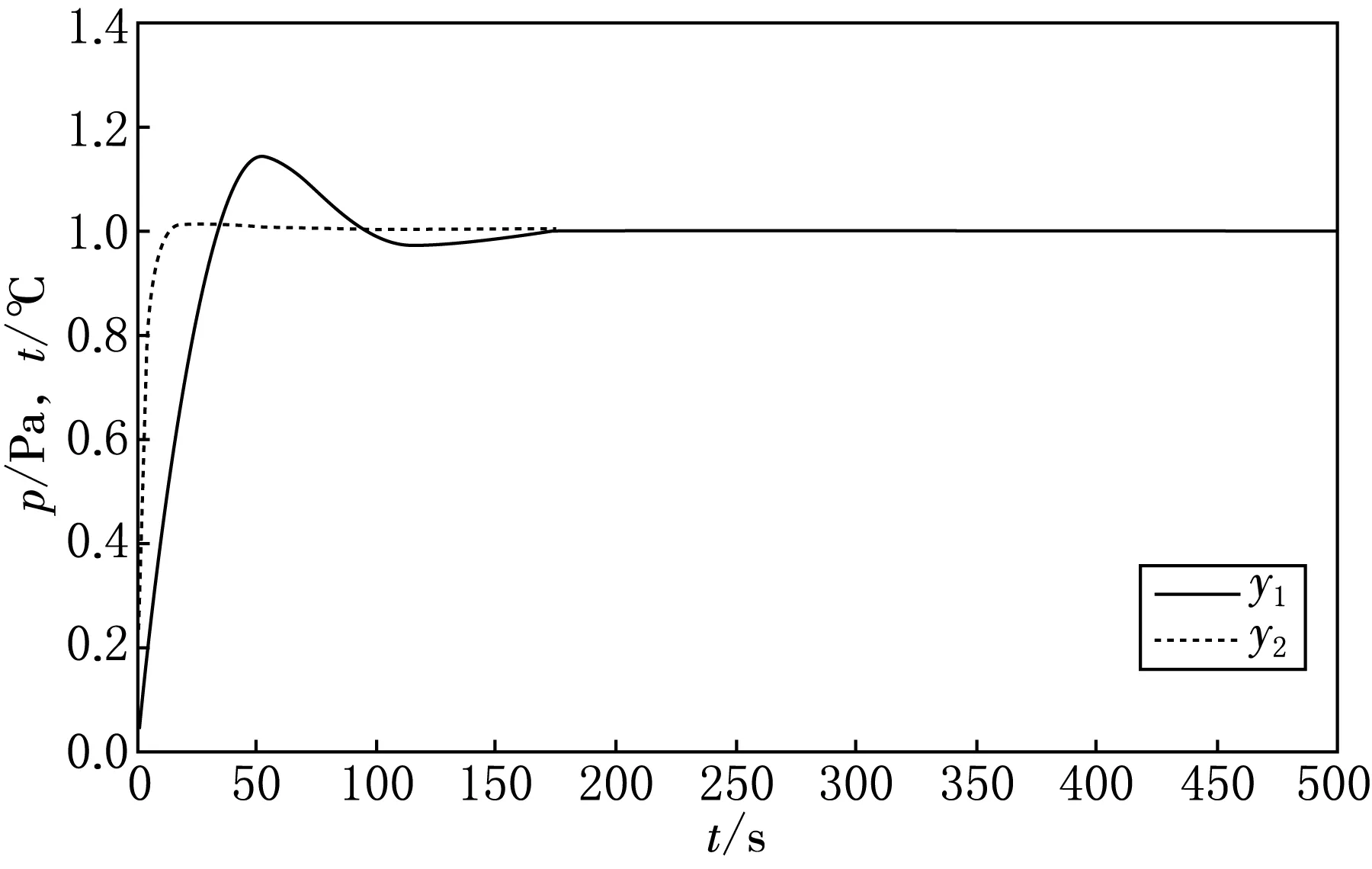
圖5可以看出模糊神經網絡(FNN)解耦控制器大大削弱了球磨機出口溫度t和入口負壓p2個回路之間的相互影響,在此基礎上,可近似將雙輸入雙輸出的球磨機系統等同于2個簡單單閉環系統.
圖5 球磨機系統解耦響應曲線

在圖6中,y1代表球磨機出口溫度,y2代表球磨機入口負壓.由2個圖對比可知BELBIC+FNN的解耦控制方法的超調量、調節時間明顯優于PID+FNN解耦控制方案.
為測試本文設計球磨機控制系統抗干擾性,在球磨機控制系統趨于穩定(500 s)后,在系統內加入幅值為0.1的單位沖激擾動信號,響應曲線如圖7所示.由圖7可以看出,基于BEL模型的控制方法在有干擾的情況下相比于PID控制器能夠較快地恢復穩定并且無震蕩.
(a)PID+FNN解耦控制 (b)BELBIC+FNN解耦控制
圖6 球磨機控制階躍響應曲線
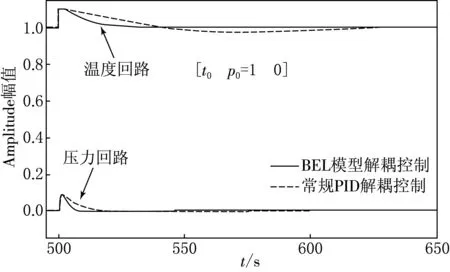
圖7 單位脈沖干擾信號下的響應曲線
4 結論
在傳統球磨機系統控制過程中存在的多變量、強耦合的特點,本文引入了基于大腦情感學習模型,構建了大腦情感學習控制器,該控制方法具有簡單、響應速度快、抗干擾能力強等特點,并且優于其他傳統類型的控制器,同時加入模糊神經網絡(FNN)更好的解決了球磨機控制變量存在的強耦合的問題.
[1] 程啟明,程尹曼,汪明媚,等.球磨機混合優化前向神經網絡PID解耦控制系統[J].電力系統及其自動化學報,2010(2):54-59.
[2] 吳杰康,陳明華,陳國通.基于PSO的模糊神經網絡短期負荷預測[J].電力系統及其自動化學報,2010(2):54-59.
[3] 王帥夫,劉景林.基于大腦情感學習模型的步進電機控制系統[J].吉林大學學報(工學版),2014(3):765-770.
[4] LUCAS C,SHAHMIRZADI D,SHEIKHOLESLAMI N.Introducing BELBIC:brain emotional learning based intelligent controller[J].Intelligent Automation & Soft Computing,2004,10(1):11-21.
[5] 楊國亮,余佳偉,魯海榮.情感智能的球磨機系統內模控制研究[J].2015(9):1071-1074.
[6] 劉長良,梁偉平,李長青.火電廠球磨機制粉系統的自調整模糊控制[J].中國電機工程學報,2001(12):93-96.
[7] 吳杰康,陳明華,陳國通.基于PSO的模糊神經網絡短期負荷預測[J].電力系統及其自動化學報,2007(1):63-67.
[8] 白江斌,金慰剛,張建華.電廠球磨機的模糊神經網絡控制[J].儀器儀表用戶,2007,14(1):43-45.
(責任編輯:石紹慶)
BELBIC and FNN for ball mill decoupling control system research
YANG Guo-liang, QIAN Liang,ZHU Song-wei
(School of Electrical Engineering and Automation,Jiangxi University of Science and Technology,Ganzhou 341000,China)
In view of the multi variable,strong coupling and time-varying characteristics of the ball mill system,a compound control scheme based on brain emotional learning intelligent controller (BELBIC) and fuzzy neural network (FNN) is proposed.Using the adaptive learning ability of the fuzzy neural network,the decoupling device of the ball mill is designed,which effectively eliminates the coupling phenomenon.Through the simulation experiments,the control scheme proposed in this paper is better than the traditional decoupling control method,which can solve the problem of strong coupling of ball mill and has good robustness.
brain emotional learning based intelligent controller;ball mill system;fuzzy neural network;decoupling control
1000-1832(2016)04-0078-05
10.16163/j.cnki.22-1123/n.2016.04.017
2015-11-25
國家自然科學基金資助項目(51365017,61305019);江西省青年科學基金資助項目(20132bab211032).
楊國亮(1973—),男,博士,教授,主要從事智能控制、模式識別與圖像處理研究;通信作者:錢亮(1990—),男,碩士,主要從事智能控制研究.
TP 273 [學科代碼] 510·80
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中國生殖健康(2020年5期)2021-01-18 02:59:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
北極光(2019年12期)2020-01-18 06:22:10
小太陽畫報(2019年10期)2019-11-04 02:57:59
中國生殖健康(2018年5期)2018-11-06 07:15:40
電子制作(2018年11期)2018-08-04 03:25:42
