三維激光掃描技術在地質災害中的應用
2016-12-28 06:13:21馮彥磊馬秋禾薛意盟
地理空間信息 2016年10期
馮彥磊,馬秋禾,賁 進,雷 蓉,薛意盟
(1.信息工程大學,河南 鄭州 450001)
三維激光掃描技術在地質災害中的應用
馮彥磊1,馬秋禾1,賁 進1,雷 蓉1,薛意盟1
(1.信息工程大學,河南 鄭州 450001)

由于三維激光掃描技術具有高效、快速、高分辨率、非接觸、數據處理方便等優點,在地質災害監測領域得到了廣泛應用。此次作業過程中采用三維激光掃描技術對地質災害隱患點進行了2次掃描,獲取點云數據后使用Leica Cyclone進行數據處理,然后再利用Geomagic studio構建三維模型,通過對比獲得該地區的變化情況。
地質災害監測;三維激光掃描;點云數據;三維建模
激光測量技術萌芽于20世紀80年代,利用激光的單色性、方向性、相干性、高亮度等特點將激光引入測量裝置中,并表現出巨大的優勢。激光測量方法采用非接觸方式快速獲取海量地面點測量數據,為地質災害防治提供了有效的監測手段。
1 地質災害監測方法
現階段各行業使用的監測方法有多種,如控制網測量方法、航空攝影測量方法、物理化學場監測、核磁共振技術等[1]。
1)控制網監測方法。在地質災害點布設大地測量控制點或GPS點,通過測量點的位移情況來分析地質災害點地形變化。該方法操作簡單、直觀性強、技術成熟且精度較高[2],但是只能表達離散點的位移變化情況,不能全面、完整、連續地表達地形變化。
2)航空攝影測量方法。航空攝影測量技術是通過不同時期的地質災害隱患點的航片制作大比例尺地形圖、DEM、DOM來獲得地形變化情況,并以此為依據分析和預報災害。該方法受天氣影響較大,云層遮蓋、水汽折射以及地面非地形因素的干擾使拍攝的航片難以完全表達地表形態,而且圖像的處理難度較大、作業費用昂貴、作業周期長,影響災害的應急處理。航空攝影測量獲取的影像數據可作為基礎資料對測區周邊環境進行補充,以便日后監測。
3)車載移動測量設備。采用移動測量車以及相關設備對目標區域進行移動掃描拍攝,該方法集成了GPS定位技術、慣導裝置、激光掃描、攝影測量等技術,可快速獲取點云數據[3],但該方法受地域限制,不能快速到達山區等難以通行的地區。
4)其他監測方法。其他監測方法如物理化學場監測、地下水監測等,這些方法需要用到相應的專業儀器,且只針對較小區域的監測。
2 三維激光掃描監測
鑒于以往傳統監測方法存在的不足,本次作業采用三維激光掃描技術進行監測。三維激光掃描技術可以獲取海量地面點三維坐標,直觀表達掃描區域的三維景觀,并且精度高、掃描速度快、實時性強、使用方便、適用范圍廣、適用時間長,因此能夠更好地服務于地質災害監測。
2.1 三維激光掃描儀
三維激光掃描儀按照掃描距離可分為航空激光掃描系統、長距離激光掃描系統、中距離激光掃描系統、短距離激光掃描系統;按照搭載平臺可分為機載(星載)激光掃描系統、地面型激光掃描系統、便攜式激光掃描系統;按照工作原理可分為脈沖測距型、相位干涉型和三角法掃描系統。
本次作業采用Leica Scanstation C10型三維激光掃描儀,該掃描儀使用脈沖測距技術,由一臺高速激光測距儀和一組可以引導激光并以均勻角速度旋轉的反射棱鏡構成。掃描范圍為0.1 m~300 m,掃描速度最高50 000點/秒,單次測量點位精度6 mm,單次測距精度4 mm,標靶獲取精度2 mm,垂直方向角270°,水平方向角360°。
2.2 作業原理
三維激光掃描儀發射器發出一個激光脈沖信號,利用激光發射和傳回到接收器的時間差計算目標點P與掃描儀的距離S,控制編碼器同步測量每個激光脈沖橫向掃描角度α和縱向掃描角度β(如圖1)[4]。目標點P的坐標計算公式為:

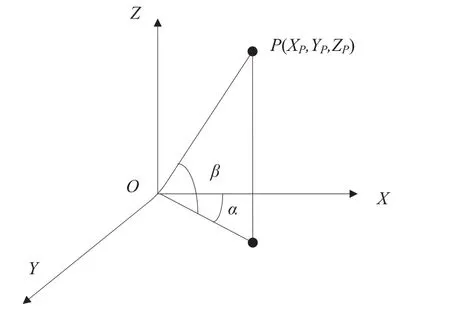
圖1 三維激光掃描儀作業原理
3 作業過程
河北省邢臺市西部地區多為丘陵地貌,較易發生崩塌、滑坡、泥石流和塌陷等自然災害,災害隱患點周邊環境復雜,受周邊居民建筑和植被覆蓋的影響,依靠車載移動測量裝備獲得的測量數據有限,不能滿足地質災害評估的需要。
為減少自然災害造成的損失,有關部門要求定期對地質災害隱患點進行監測。由于測區內植被折射的點云過多,到達地面的有效點云數量有限,影響地形數據的獲取,因此選擇在3月和5月進行掃描作業,并利用航空攝影技術獲取災害點周邊區域的基礎數據。作業流程圖如圖2所示。
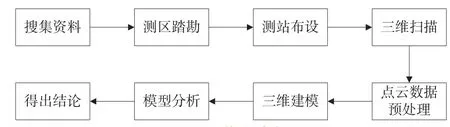
圖2 作業流程
3.1 準備工作
相關的準備工作有:
1)資料收集。收集測區相關資料,如交通圖、行政區劃圖和已有的影像圖、地形圖等。
2)測區踏勘。現場勘查地質災害隱患點的實際位置、面積、災害類型、植被覆蓋、交通路線等,確定作業方案并標繪于資料圖上。
3)測站布設。在被監測區域內均勻布設GPS監測點,個數不少于12個,間距不大于150 m,呈球形標靶分布,不處于一條直線上,以保證全面客觀地監測到整個區域。GPS監測點應埋設在相對穩定的地方,要能夠長期保存并且不易受到破壞。
3.2 掃描作業
作業前檢查儀器是否正常,是否帶齊配件,包括電池組、三腳架、球形標靶、數碼相機等輔助設備。
在測站位置做臨時標記,標明站點號;架設三維激光掃描儀,安置儀器并整平;測量儀器高,取兩次測量平均值。
記錄相關內容,如操作員、觀測時間、測站號、儀器高、標靶號等。在監測點上水平放置球形標靶,注意清除儀器與標靶之間的樹木等遮擋物,必要時可使用三腳架。一個測站內保證有至少3個標靶,但實際作業過程中為保證掃描精度,每個測站一般布設4個標靶,確保掃描數據的拼接。記錄員繪制簡圖,記錄測站和標靶之間的相對位置關系。
開始掃描之前,在掃描儀主菜單下建立測區目錄,設置相關參數,包括附屬相機曝光量和分辨率(1 920×1 920像元)、掃描分辨率(100 m內點間隔為5 cm)、掃描范圍。然后選擇全景三維掃描,掃描方式為“掃+照”。
掃描時,無關人員不得逗留在掃描區域內,且掃描區域內應盡量減少遮擋物。
“全景掃+照”結束后再單獨對該測站內的球形標靶進行二次掃描,這樣有利于點云數據處理時尋找標靶位置和坐標轉換。
3.3 數據處理
本次作業的坐標系統采用CGCS2000平面坐標系,高程基準為CGCS2000大地高,高斯-克呂格投影中央經線為114°。
3.3.1 數據質量檢查
把每天的工作數據導出,檢查點云數據的質量、數據完整性、連接點是否可用、是否滿足拼接要求等。
發現問題及時處理,必要時進行補測。
3.3.2 數據預處理
Cyclone軟件是Leica三維激光掃描儀配套的點云數據處理軟件,可以在該軟件中進行點云數據的瀏覽和相關操作。
1)拼接。依次將各測站的點云數據導入到Cyclone軟件中,擬合測站內標靶,以連接點在測站的坐標為基準,通過約束條件對坐標軸進行旋轉和平移,然后將不同測站的點云數據拼接在一起,形成一個統一的任意坐標系的整體區域。分站數據進行拼接時,最大誤差不得超過0.006 m,該過程也稱為配準。
2)點云統一化。將多塊點云合成一個單一有效的點云。
3)坐標系歸化。導入測區內,用控制點的大地坐標將控制點與點云數據作聯合平差,計算殘差應小于2 cm,然后將整個測區統一轉換到CGCS2000坐標系中。
4)點云賦色。通過軟件對相機拍攝的紋理影像和掃描的黑白點云匹配,生成具有色彩信息的點云數據。
5)過濾。在掃描時樹木、房屋、行人等非地形要素也會被掃描并構成點云,而這些點云數據并不參與地形變化分析,應使用Cyclone軟件的剖面切割、視角轉換等功能將其刪除[5]。
3.3.3 構建三維模型
三維建模是指對三維物體建立適合于計算機處理和表示的數學模型。本次作業采用Geomagic studio軟件進行建模。該軟件是通過掃描點云自動生成數字模型的逆向工程軟件,可創建一個最優化的擬合曲面外形。
首先將處理好的*.XYZ格式點云數據導入Geomagic studio(見圖3)軟件中,去除因折射或錯誤造成的飛點,然后統一采樣,降低點云密度,使平坦曲面上的點數目減少量一致,可以加快處理速度。采樣之后將離散的點云數據封裝建立TIN模型(見圖4),然后進行數據填充,填補因刪掉樹木、房屋等造成的數據漏洞(見圖5)。對該模型進行數據檢查,“網格醫生”功能可以自動修復多邊形網格內的缺陷,刪除被選中的有錯誤的三角形,多次重復進行,直到完全消除錯誤。此時三維模型即可真實顯示地表起伏狀況[6]。
圖3 導入的點云數據

圖4 封裝后的點云
圖5 填充后的點云
3.4 三維模型分析
將兩個監測時期獲取的地質災害隱患點的三維模型進行分析,計算兩個模型的體積偏差大小,在偏差分析圖中以不同顏色表示地形數據變化情況,并與給定限差相比較,分析地形變化情況。同時對兩個時期的GPS監測數據進行對比,分析監測點的沉降狀況,對該地區的穩定性進行評估。
圖6中兩個監測時期的三維模型的偏差分析結果和GPS監測點比較結果說明,該區域地形變化在允許范圍內,暫時沒有發生災害的跡象,目前較安全。

圖6 偏差分析圖
4 結 語
三維激光掃描技術可以高精度、高效率、高密度地獲取監測區域的點云數據[7],能更準確、快速、高效、低成本地完成地質災害監測任務,該技術以其良好的監測效果在相關部門得到了很好的應用。隨著軟件國產化進程的加快、功能的升級、硬件費用下降以及深入的研究,三維激光掃描技術將會有更廣泛的應用[8-9]。
[1] 韓子夜,薛星橋.地質災害監測方法技術現狀與發展趨勢[J].中國地質災害與防治學報,2005,16(3):138-141
[2] 李全寶.GPS技術在地質災害預警中的應用研究:以新沂市馬陵山為例[J].城市勘測,2007(6):69-70
[3] 王輝.車載激光測量系統誤差分析及控制[J].測繪地理信息,2015,40(4):70-72
[4] 宋宏.地面三維激光掃描測量技術及其應用分析[J].測繪技術裝備,2008(2):40-43
[5] Leica Geosystems HDS Cyclone培訓手冊[Z].徠卡測量系統股份有限公司,2009
[6] Leica Scanstation C10使用手冊[Z].徠卡測量系統股份有限公司,2011
[7] 習曉環,駱社周,王方建,等.地面三維激光掃描系統現狀及發展評述[J].地理空間信息,2012,10(6):13-15
[8] 謝宏全,侯坤.地面三維激光掃描技術與工程應用[M].武漢:武漢大學出版社,2013
[9] 張啟福,孫現申.三維激光掃描儀測量方法與前景展望[J].北京測繪,2011(1):39-42
P225
B
1672-4623(2016)10-0098-03
10.3969/j.issn.1672-4623.2016.10.031
馮彥磊,碩士研究生,研究方向為攝影測量。
2015-11-27。
項目來源:國家自然科學基金資助項目(41271391)。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
兒童故事畫報(2013年3期)2013-06-24 05:40:30
