車載魚眼相機的間接法全景影像拼接
2016-12-28 06:13:12曹君,洪勇
地理空間信息 2016年10期
曹 君,洪 勇
(1.武漢城市職業學院,湖北 武漢 430064;2.立得空間信息技術股份有限公司,湖北 武漢 430070)
車載魚眼相機的間接法全景影像拼接
曹 君1,2,洪 勇2
(1.武漢城市職業學院,湖北 武漢 430064;2.立得空間信息技術股份有限公司,湖北 武漢 430070)

提出了一種車載魚眼相機的間接法全景影像拼接方法,由拼接后全景影像上的像點坐標出發反求其在原始圖像上的像點坐標,從而解決拼接所得全景影像像點非規則排列問題。通過實驗發現,采用該方法得到的全景影像畫面清晰、成像質量明顯提高,證實了該方法進行車載魚眼影像全景拼接的可靠性。
魚眼相機;間接法;全景影像拼接
近年來,街景地圖作為一種全新的實景地圖服務模式,能為用戶提供城市、街道或其他環境360°全景影像,給用戶帶來身臨其境的感受[1],從而得到國內多家圖商和互聯網企業的青睞。目前,考慮到地圖連續性、成像視場角、影像分辨率等因素,街景地圖采集主要是通過車載多視點組合式魚眼全景相機獲取。然而,受數據量大、成像模式等方面限制,如何通過序列魚眼相機數據實現全景影像快速無縫拼接,一直是困擾各大數據生產商的問題。
基于上述前提,本文對車載魚眼相機的全景影像拼接模型進行了推演,針對直接法全景影像拼接存在部分像元素內可能出現“空白”(無像點),而有的像元素可能出現重復(多個像點)問題提出了一種間接全景影像拼接方法[2],即由拼接后全景影像上像點坐標出發反求其在原始影像上的像點坐標,從而解決拼接影像像點非規則排列問題。
1 間接法全景影像拼接
由于現有全景相機由多個光心位置、不同焦距、不同獨立魚眼相機組合而成,直接從全景影像像素坐標獲取其對應原始魚眼影像上的像素坐標G(srcx,srcy)較為復雜,因此,本文對該轉換過程進行了細化,分如下幾步進行:
1)全景像素坐標系P(dstx, dsty) 到全景球面坐標系PO(θ,φ)。全景像素坐標系到全景球面坐標系間的投影關系如圖1所示。
對全景影像上任意一點P(dstx,dsty)在全景球上對應的坐標PO可通過球面上的點與X軸夾角φ、與XOY平面的夾角θ來表示,其轉換關系如下:

式中,imgW、imgH分別表示全景影像的寬度和高度。

圖1 全景像素坐標系到全景球面坐標系
2)全景球面坐標系PO(θ,φ)到單個相機平面坐標系 PC(u,v)。受魚眼影像失真和變形較大的影響,在獲得像點在全景球面坐標系上的坐標后,不能直接將其對應到單個魚眼相機坐標系中,要先將其轉化為理想的平面坐標系[3]。全景球面坐標系到單個相機平面坐標系之間的變換關系如圖2所示。

圖2 全景球面坐標系到單個相機平面坐標系
由于全景球面中心O與各相機攝影中心C并非嚴格位于同一幾何中心,因此,在解算全景球面坐標PO(θ,φ)與相機平面坐標 PC(u,v)之間變換關系時,往往先假定某一物方距離D來解算球面點對應物方點PG的坐標值:

式中,(XO,YO,ZO)為全景球中心坐標,全景球面坐標系往往以該中心為原點,且該坐標一般為(0,0,0)。依據共線條件方程求解該點在相機平面坐標系中的坐標值 :
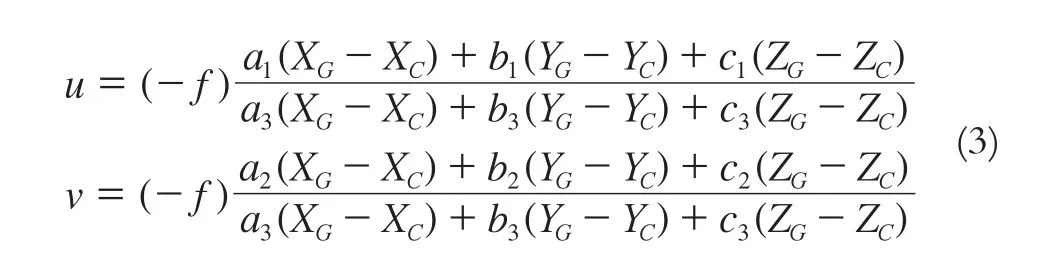
式中,(XC,YC,ZC)為事先通過高精度檢校得到的單個相機在全景球坐標系下的坐標;a1,a2,…c3為檢校得到的單個相機在全景球坐標系中的旋轉向量。
3)相機平面坐標系PC(u,v)到原始魚眼影像坐標系PF(xF,yF)。在事先獲得魚眼相機畸變系數前提下,可根據魚眼相機球面坐標解算其對應的相機平面坐標,但由于影像從球面轉為平面后,影像尺寸大幅度拉伸,因此,采用此方法獲得的平面影像往往存在大量“黑洞”。為彌補這一不足,可首先根據相機平面坐標值獲取其向徑值及切向角再對魚眼相機通用畸變校正模型的反函數進行多項式擬合[4],得到相機平面坐標向徑rC與魚眼相機球面坐標向徑rF的對應關系:

式中,p1,p2,…,pn+1為對檢校所得畸變函數進行反函數擬合得到的多項式系數。解算其對應的原始魚眼影像坐標系下的坐標值:

4)灰度內插與賦值。經過上述3個步驟計算后,即可獲得目標全景影像上各像點對應原始魚眼影像上的像點坐標,但由于求得的像點坐標不一定正好落在像元素中心,因此需要進行灰度內插,一般采用雙線性內插方法,求得像點PF的灰度值g(xF,yF)并將其賦值給全景影像上的像元素P的灰度G(dstx,dsty):

2 實驗結果及分析
為驗證算法的有效性,本文以立得空間公司生產的全景影像采集系統LeadorHD為實驗設備,進行了多組全景影像生產實驗。該設備由6個獨立相機組成,分別搭載焦距為8 mm的魚眼鏡頭,其中5個環繞一周水平安置,另一個朝上,用于拍攝天頂方向影像,如圖3所示。

圖3 LeadorHD全景影像采集系統示意圖
按本文算法流程對該設備采集的魚眼影像進行全景拼接處理,并與直接法拼接效果進行對比,結果分別如圖4和圖5所示。

圖4 直接法全景影像拼接效果

圖5 間接法全景影像拼接效果
從圖中可以看出,采用直接法進行拼接得到的全景影像成像模糊且存在大量“黑洞”;而采用間接法進行拼接則有效地避免了這一問題,全景影像畫面清晰、成像質量明顯提高,由此,證明了本文算法的有效性。
3 結 語
針對車載魚眼相機全景影像拼接的需求,對間接法魚眼相機的全景影像拼接模型進行了推演,該方法由拼接后全景影像上的像點坐標出發反求原始影像上的像點坐標,并進行灰度賦值,能夠有效地解決直接法全景影像拼接過程中因像幅大幅度拉伸變形而產生的像點“空白”等問題,并通過實驗驗證了該方法的有效性與優越性。參考文獻
[1] 周璞.街景地圖引領位置服務新方向[EB/OL].[2015-08-10]. http://soft.zol.com.cn/284/2841579_all.html
[2] 張劍清,潘勵,王樹根.攝影測量學[M].武漢:武漢大學出版社,2009
[3] 季順平,史云.車載全景相機的影像匹配和光束法平差[J].測繪學報,2013,42(1):94-100
[4] 馮文灝.近景攝影測量[M].武漢:武漢大學出版社,2002
[5] 崔漢國,陳軍,王大宇.魚眼圖像校正及拼接的研究與實現[J].計算機工程,2007,33(10):190-192
[6] 續園園,李曉明.一種通用的魚眼圖像全景拼接方法[J].太原師范大學學報,2011,10(1):20-23
[7] 楊恒.魚眼圖像拼接的研究與實現[D].武漢:武漢理工大學,2013
P235
B
1672-4623(2016)10-0073-02
10.3969/j.issn.1672-4623.2016.10.021
曹君,碩士研究生,主要研究方向為移動測量技術。
2015-08-14。
項目來源:國家高技術研究發展計劃資助項目(2015AA124001);測繪地理信息公益性行業科研專項資助項目(201512008)。
