加權變異粒子群BP神經網絡在遙感影像分類中的應用
2016-12-28 08:48:39胡永森吳良才付建東
地理空間信息 2016年12期
胡永森,王 力,吳良才,黃 妮,付建東,3
(1.東華理工大學 測繪工程學院,江西 南昌 330013;2.中國科學院遙感與數字地球研究所 遙感科學國家重點實驗室,北京100101;3.流域生態與地理環境監測國家測繪地理信息局重點實驗室,江西 南昌 330013)
加權變異粒子群BP神經網絡在遙感影像分類中的應用
胡永森1,2,3,王 力2,吳良才1,黃 妮2,付建東1,3
(1.東華理工大學 測繪工程學院,江西 南昌 330013;2.中國科學院遙感與數字地球研究所 遙感科學國家重點實驗室,北京100101;3.流域生態與地理環境監測國家測繪地理信息局重點實驗室,江西 南昌 330013)

在經典的BP神經網絡框架支撐下,利用加權變異粒子群算法使神經網絡的訓練更加科學,同時也更好地發揮了粒子群算法的優點,使其分類效果更加精準。實驗后的分類結果表明,與改進之前的BP神經網絡相比,總體精度和Kappa系數分別提高了0.108 3和0.138 3;與支持向量機、最大似然及最小距離等分類方法進行了對比,分類效果均優于以上方法。加權變異粒子群BP神經網絡不僅可以實現遙感影像的高精度分類,對解決“同譜異物”和“異物同譜”現象也具有一定的作用。
粒子群算法;混合神經網絡;加權;變異;分類
遙感圖像分類是遙感圖像信息處理研究中最基本也是最重要的問題之一,遙感圖像分類方法精度的提高直接影響著遙感技術的應用和發展[1-2]。遙感影像的分類技術主要是根據地物反射的電磁波輻射信息在影像上的特征來識別地物的類屬及其分布情況[3],而能否快速精確地實現計算機自動分類依靠的是分類算法[4]。在遙感影像分類的算法中,人工神經網絡(artificial neural network. ANN)便是其中一種。作為新興的邊緣交叉學科,由于其在處理非線性信息上的優勢,以及大規模并行和分布式存儲、處理,自組織和自學習的能力而受到越來越多研究人員的青睞[5-12]。在前人研究的基礎上,本研究進一步探討了加權變異粒子群BP神經網絡在遙感影像分類中的可行性和精度,該研究為遙感影像的自動分類提供了一種新的思路和方法。
1 加權變異粒子群BP神經網絡算法
1.1 加權變異粒子群算法
粒子群的算法主要是針對全局,每一個粒子有自己的位置,粒子越多全局性越強[12-14]。模型的結合主要以神經網絡模型為主,在模型參數確定的過程中,首先用粒子群算法去找到全局的最優解,再利用BP神經網絡中帶有動量因子的梯度下降算法去尋找局部最優解。粒子群發揮的作用主要體現在:粒子群中每個粒子的空間位置數據為神經網絡結構中的權值和閾值,粒子群算法計算適應值的過程用神經網絡計算誤差能量的過程代替,根據誤差能量的多少來確定粒子位置的個體最優和全體最優,然后再計算粒子的更新速度。
算法的改進過程為:假設搜索空間是X維的,整個群體中有m個粒子,這些粒子都有自己的位置和速度,例如第k個粒子的位置向量為lk=(lk1,lk2,lk3,…,lkx),k=1,2,3,…,m;速度向量為vk=(vk1,vk2,vk3,…,vkx),k=1,2,3,…,m。假設第k個粒子迭代次數到第t次為止,搜索到的最優位置為pk=(pk1,pk2,pk3,…,pkx),k=1,2,3,…,m。整個群體在第t次搜索到的最優位置為pg=(pg1,pg2,pg3,…,pgx)。在第t次計算后粒子根據公式更新自己的速度,從而來完成位置的更新。則第(t+1)次速度更新公式為:

式中, k=1,2,3,…,m。vk(t+1)表示第k個粒子在t+1次迭代后的速度。
但是,根據對文獻的閱讀、資料的整理以及不斷的實驗發現,如果對粒子的初速度加上一個權值,會使粒子的訓練結果更加科學,同時為初始速度后面的兩個改進量加上一個隨機數,使其產生變異,以達到粒子群在龐大的數量優勢基礎之上增加和維持群體的多樣性,使其全局搜索能力更強,產生更優解的概率更大,同時減少早熟收斂的概率。所以在本文的粒子群模型中將速度的更新公式改為:

式中,c0為[0,1]之間的常數;r1、r2為[0,1]上均勻分布的隨機數[15],對公式進行加權和變異修正后通過實驗發現,訓練結果雖然科學和精確了很多,但為了防止搜索過程中產生收斂震蕩,對公式再加上一個非負加速常數來改善其收斂速度,即

式中,c1、c2即為非負加速常數為[0,1]上均勻分布的隨機數。粒子位置更新公式則為:

式中,xk(t+1)表示第k個粒子在t+1次迭代后的位置。
算法中的速度在更新后有可能會出現不合理的速度量,把速度控制在一個有效的范圍內,計算過程中根據經驗值規定一個最小、最大速度-vmax、vmax。速度控制的公式為:

1.2 BP神經網絡
BP神經網絡是多層的感知器神經網絡,采用的是誤差反向傳播學習算法。BP神經網絡的結構包括輸入層、隱含層、輸出層,其中隱含層可以是多個[16]。
BP算法的模型是數據通過輸入層輸入,與權值和閾值計算,在各個隱含層通過激勵函數計算輸出,隱含層輸出結果再與權值、閾值進行計算,再到輸出層激勵函數計算,輸出計算結果。但是,輸出層計算輸出的結果要與真值進行比較計算誤差,得到的誤差根據梯度下降算法進行反向傳播,改正各個權值及閾值,最終輸出結果在滿足最大迭代次數后停止計算或者誤差能量小于設定的閾值時停止計算[17]。
1.3 加權變異粒子群算法與BP神經網絡的結合
先用加權變異粒子群算法對神經網絡模型的參數進行全局優化,使其迅速搜索到局部最優解的位置,再用BP神經網絡的梯度下降算法在局部區域搜索解的優勢,對全局參數進行局部最優化。
結合的關鍵是加權變異粒子群算法與BP神經網絡的結合。具體的結合方法是首先依據實驗選擇合適的粒子個數,而每個粒子的初始位置和速度可以隨機生成。每個粒子的維度要根據神經網絡模型的輸入層、輸出層和隱含層的神經元個數來確定。每個粒子有且僅有一組神經網絡模型計算過程中的權值和閾值參數,然后對每一個粒子進行一次神經網絡模型的計算,根據計算結果從中選出最優的粒子作為群體最優,并對結果進行保存。計算出最優粒子后,根據公式(3)初更新每個粒子的速度,再根據公式(4)完成位置的初更新,最終的更新都要根據粒子的速度、位置的最大最小值來完成。首次更新前,粒子個體的初始位置可以看成是個體的最優位置。更新結束后再代入神經網絡模型進行計算,重新更新群體最優粒子、個體最優粒子、個體位置和個體速度。對更新后的粒子進行誤差能量計算時,誤差能量小則適應值大,將此時粒子的位置標記為個體最優,如果誤差能量大,則不更新粒子的個體最優位置。循環迭代,直到達到目的為止。具體的流程如圖1所示。

圖1 模型流程圖
2 基于加權變異粒子群BP神經網絡的遙感影像分類
2.1 數據源及分析方法
本文采用Landsat TM5多光譜影像作為源數據,該影像共有6個波段,空間分辨率為30 m。影像包含了豐富的地物類型,如林地、草地、耕地、沙地、裸地等。研究中分別采用BP神經網絡、加權變異粒子群BP神經網絡、最小距離、最大似然、支持向量機等方法對遙感影像進行分類,并通過計算混淆矩陣、總體分類精度和Kappa系數,定量對比分析了各方法的分類精度。影像數據分析采用ArcGIS10.1和ENVI5.1版本的軟件,并借助IDL5.3對ENVI5.1進行了二次開發,以滿足文中加權變異粒子群算法與神經網絡結合后分類的要求,最后利用Excle2013進行精度統計分析。
2.2 不同方法分類結果分析
在原圖中可以發現林地和草地之間存在很多“同譜異物”現象,而山谷和山坡陰面的林地由于位置原因在原圖中顯示為“黑色”,與其他位置的林地存在著明顯的“同物異譜”現象(圖2a)。分析各分類圖結果可以發現(圖2b-f),有的分類結果中很多草地被錯分成了林地,有的林地則被分成了草地。而加權變異粒子群BP神經網絡(圖2c)在處理林地和草地之間的“同譜異物”現象時相對于其他方法有著明顯的優勢。
在“同物異譜”現象中,雖然這些方法都對林地進行了很好的分類,“黑色”林地也被正確分類(圖2b~f),為了處理這種情況,使得除了加權變異粒子群BP神經網絡之外的方法產生了紊亂,導致誤將附近的草地也認為是林地,從而產生錯分現象。由于對粒子群算法中的粒子進行了變異,產生了更多更優的解,進一步強化了其處理非線性問題的優勢,在處理“同物異譜”和“同譜異物”現象時表現出了較好的效果。

圖2 不同分類結果對比圖
在其他地物的分類中,從全局來看加權變異粒子群BP神經網絡分出的影像孤立點較少,各地物空間上的連續性強、破碎度低。相對于改進前的BP神經網絡,在裸地的錯分中可以證實這一點,說明改進后的方法對神經網絡在尋找最優解時的早熟收斂現象有了很大的改善。而最小距離、最大似然和支持向量機等方法由于地物類別的錯分,比如支持向量機在裸地和草地之間的誤分(圖2f),最大似然在耕地和林地之間的誤分(圖2e)等雖然是小地塊的錯分,但導致了影像的最終分類結果破碎度高。
2.3 不同方法分類精度的對比分析
對影像進行分類后,在對應的高分影像上選取一定驗證樣本對分類結果進行驗證,得到各分類方法驗證樣本的混淆矩陣,如表1~表5所示。

表1 BP神經網絡分類混淆矩陣

表2 加權變異粒子群BP神經網絡分類混淆矩陣
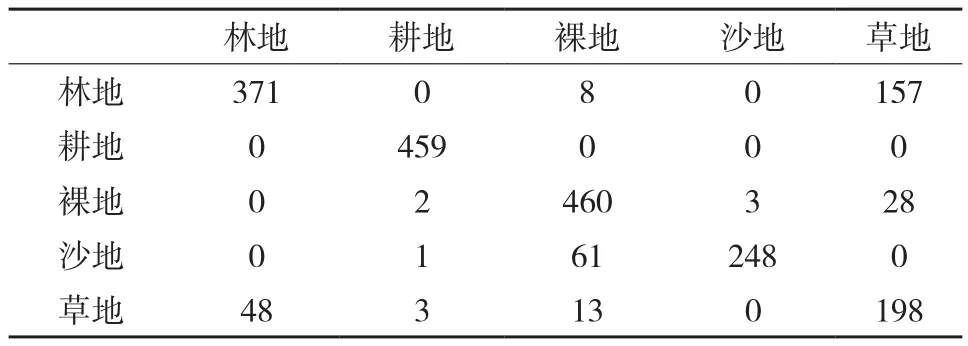
表3 最小距離分類混淆矩陣

表4 最大似然分類混淆矩陣

表 5 支持向量機分類混淆矩陣
采用總體分類精度和Kappa系數作為分類結果精度的評價標準[18,19],由混淆矩陣可以得出各分類方法的總體精度和Kappa系數,如表6所示。

表6 總體分類精度和Kappa系數
觀察各個分類方法的混淆矩陣,加權變異粒子群BP神經網絡(表2)中有297個草地驗證像元被正確分類,僅有25個像元被錯分到了林地;林地驗證像元中,415個被正確分類,只有26個其他地物被錯分到林地,在各分類方法中均處于最優,再次驗證了該方法在處理“同譜異物”和“同物異譜”問題中的優勢。
在裸地的分類中,BP神經網絡有400個像元被正確分類,剩余142個像元被錯分到其他類別;而改進后的加權變異粒子群BP神經網絡只有22個像元被錯分,其余520個像元均為正確分類,改進效果明顯。對比其他幾種分類方法在裸地中的分類效果可以發現,最小距離有460個像元被正確分類,最大似然法有500 個像元被正確分類,支持向量機有492個像元被正確分類,雖然效果都不錯,但均不如加權變異粒子群BP神經網絡精準。
在沙地的分類中,由于沙地的反射率較其他地物有明顯差異,故沙地的解譯標志明顯,光譜特征突出。這種特征提高了加權變異粒子群BP神經網絡的學習和分類效率,使得沙地的251個驗證像元全部被正確分類,其他地物錯分到沙地的像元也較少,僅有5個。BP神經網絡、最小距離、最大似然、支持向量機等方法的分類中,不僅沙地驗證像元有錯分現象,其他地物錯分為沙地的像元也較多,分類結果的破碎度也較高。在耕地分類中,加權變異粒子群BP神經網絡的混淆矩陣中被錯分的像元數目以及其他地物錯分到耕地的像元都是較少的,說明該方法的自組織學習能力強于其他方法。
總體來看,改進后的加權變異粒子群BP神經網絡模型相比改進前的BP神經網絡模型的總體精度和Kappa系數分別高出0.108 3和0.138 3,同時對比最小距離、最大似然、支持向量機等分類方法也具有一定優勢。
3 結 語
根據分類的數理統計結果和分類后圖像的對比結果可以看出,加權變異粒子群BP神經網絡相比其他方法都具有先進性和優勢,從對比中可以看出加權變異粒子群BP模型在圖像分類中優于最小距離、最大似然及支持向量機等監督分類算法。雖然本文提出的方法總體精度和Kappa系數都很高,但圖上仍然有很多錯分的現象,如何避免錯分并進一步提高分類精度仍需要后續研究[12];同時模型中的參數較多且都為經驗值,不能自動化進行,對如何減少人工干預、實現自動化參數設置還需要進一步探討。
[1] 金亞秋.空間微波遙感數據驗證理論與方法[M].北京:科學出版社,2005
[2] 楊紅磊.EM算法研究及其遙感分類應用[D].北京:中國地質大學,2009
[3] 羅小波.遙感圖像智能分類及其應用[M].北京:電子工業出版社,2011
[4] 楊希.基于神經網絡的高分辨率遙感影像分類研究[D].成都:西南交通大學,2009
[5] CARPENTER G A,GROSSBERG S. A Massively Parallel Architecture for a Self-organizing NeuralPattern Recognition Machine [J]. Computer Vision Graphics and Image Processing.1987,37(1):54-115
[6] BAGAN H.Dimension Reduction of Self-organized Neural NetWork Classification for Multi-Band Satellite Data[J].Editorial Board of Geomatics and Information Science of Wuhan University,2004,29(5):461-465
[7] 盧柳葉,張青峰,李光錄.基于BP神經網絡的遙感影像分類研究[J].測繪科學,2012,37(6):140-143
[8] 劉旭升,張曉麗.基于BP神經網絡的森林植被遙感分類研究[J].林業資源管理,2005(1):51-54
[9] 毛健,趙紅東,姚婧婧.人工神經網絡的發展及應用[J].電子設計工程,2011,19(24):62-65
[10] 卜曉波,龔珍,黎華,等.基于遺傳算法改進BP神經網絡的遙感影像分類研究[J].安徽農業科學,2013,41(33):13 056-13 058
[11] 徐小慧,張安,端木京順,等.基于粒子群分類器的遙感圖像目標識別[J].紅外激光工程,2007,36(4):551-554
[12] KRINK T,VESTERSTROM JS,RIGET J.Particle Swarm Optimization with Spatial Extension[C]//Procccdings of the 2002 Congress on Evolutionary Computation.Piscataway:NJ IEEE Press ,2002
[13] 劉衍民.粒子群算法的研究及應用[D].濟南:山東師范大學,2011
[14] 尹淑玲,舒寧,劉新華.基于自適應遺傳算法和改進BP算法的遙感影像分類[J]. 武漢大學學報(信息科學版),2007,32(3):201-204
[15] 盧柳葉,張青峰,李光錄.基于BP神經網絡的遙感影像分類研究[J].測繪科學,2012,37(6):140-143
[16] 劉天舒. BP神經網絡的改進研究及應用[D].哈爾濱:東北農業大學,2011
[17] 劉旭攏,何春陽,潘耀忠,等.遙感圖像分類精度的點、群樣本檢驗與評估[J].遙感學報,2006,10(3):366-372
[18] 鄭明國,蔡強國,秦明周,等.一種遙感分類精度檢驗的新方法[J].遙感學報,2006,10(1):39-48
[19] 董元,王勇,易克初.粒子群優化算法發展綜述[J].商洛學院學報,2006,20(4):28-33
P237
B
1672-4623(2016)12-0037-04
10.3969/j.issn.1672-4623.2016.12.013
胡永森,碩士研究生,主要是從事資源遙感研究。
2016-09-08。
項目來源:國家科技重大專項資助項目(14CNIC-032079-32-02);國家高技術研究發展計劃資助項目(2014AA06A511);國家自然科學基金資助項目(41371358)。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
少兒科學周刊·少年版(2015年3期)2015-07-07 21:00:00