渦旋壓縮機轉(zhuǎn)子動力特性測試裝置*
2016-12-25 02:04:22牛洪濤任燕玲
化工機械 2016年4期
關(guān)鍵詞:信號
李 超 牛洪濤 雷 杰 任燕玲
(蘭州理工大學石油化工學院)
渦旋壓縮機轉(zhuǎn)子動力特性測試裝置*
李 超**牛洪濤 雷 杰 任燕玲
(蘭州理工大學石油化工學院)
為研究渦旋壓縮機轉(zhuǎn)子的動力特性,以曲軸為研究對象,分別建立了渦旋壓縮機曲軸力學模型和試驗裝置,并運用ANSYS 軟件得出樣機和試驗裝置轉(zhuǎn)子受力和位移變化量;再根據(jù)渦旋壓縮機的工作原理,搭建基于電渦流傳感器的試驗、測試平臺,并應(yīng)用LabVIEW分別對試驗裝置轉(zhuǎn)子振動位移信號進行采集、分析和存儲。該試驗裝置能及時反饋渦旋壓縮機轉(zhuǎn)子的運動特性,實時顯示轉(zhuǎn)子的軸心軌跡、相互垂直位移信號的波形及功率譜等;并通過軸心軌跡形狀來判別轉(zhuǎn)子的故障類型,對預(yù)防機器故障和故障診斷有著重要的理論意義和實際意義。
渦旋壓縮機 轉(zhuǎn)子振動 傳感器 LabVIEW
渦旋壓縮機具有結(jié)構(gòu)簡單緊湊、容積效率高、噪聲低及運行平穩(wěn)等優(yōu)點,被廣泛應(yīng)用在制冷及空調(diào)等領(lǐng)域[1,2]。曲軸轉(zhuǎn)子是渦旋壓縮機的重要部件之一,曲軸轉(zhuǎn)子運行的平穩(wěn)性直接影響渦旋壓縮機的工作性能。為研究曲軸轉(zhuǎn)子傳動系統(tǒng)的動力特性問題,文獻[3]對渦旋壓縮機曲軸建立了機構(gòu)模型和力學模型,利用ANSYS軟件分析了曲軸轉(zhuǎn)子在不同工況下的應(yīng)力和應(yīng)變,并給出了曲軸的最大應(yīng)力和應(yīng)變發(fā)生部位。文獻[4]利用試驗?zāi)B(tài)方法和有限元方法分別對渦旋壓縮機曲軸轉(zhuǎn)子固有特性進行了分析,給出了各自前5階固有頻率的分析結(jié)果,并對兩種方法進行了比較。文獻[5]利用有限元方法和多體動力學理論,對渦旋壓縮機轉(zhuǎn)子進行了有限元模態(tài)分析,獲得了渦旋壓縮機轉(zhuǎn)子的固有頻率和振型。文獻[6]從有限元仿真角度分析,建立了渦旋壓縮機曲軸轉(zhuǎn)子軸系數(shù)學模型,分別對曲軸動力載荷、施加軸系邊界條件和約束條件進行了討論與動力分析。筆者以具有曲柄銷防自轉(zhuǎn)機構(gòu)的渦旋壓縮機為研究對象,通過理論建模和分析,設(shè)計了一種由電渦流傳感器和虛擬儀器構(gòu)成的轉(zhuǎn)子動力特性測試系統(tǒng)。
1 轉(zhuǎn)子力學模型
渦旋壓縮機的工作原理是在曲軸銷防自轉(zhuǎn)機構(gòu)的約束下,使動渦旋盤做公轉(zhuǎn)平動,從而使動靜渦旋之間形成的封閉容積呈周期性變化,完成對氣體的吸入、壓縮和排氣過程[7]。x坐標方向曲軸受力簡圖如圖1所示。在實際工況下曲軸轉(zhuǎn)子受到的力主要有主軸承、副軸承的支反力Fb,upp、Fb,low,主平衡鐵、副平衡鐵產(chǎn)生的離心慣性力Fc,upp、Fc,low,曲柄銷與曲軸軸心偏心而產(chǎn)生的離心慣性力Fc,csh以及動渦旋盤對曲柄銷的反作用力Fb,cr。
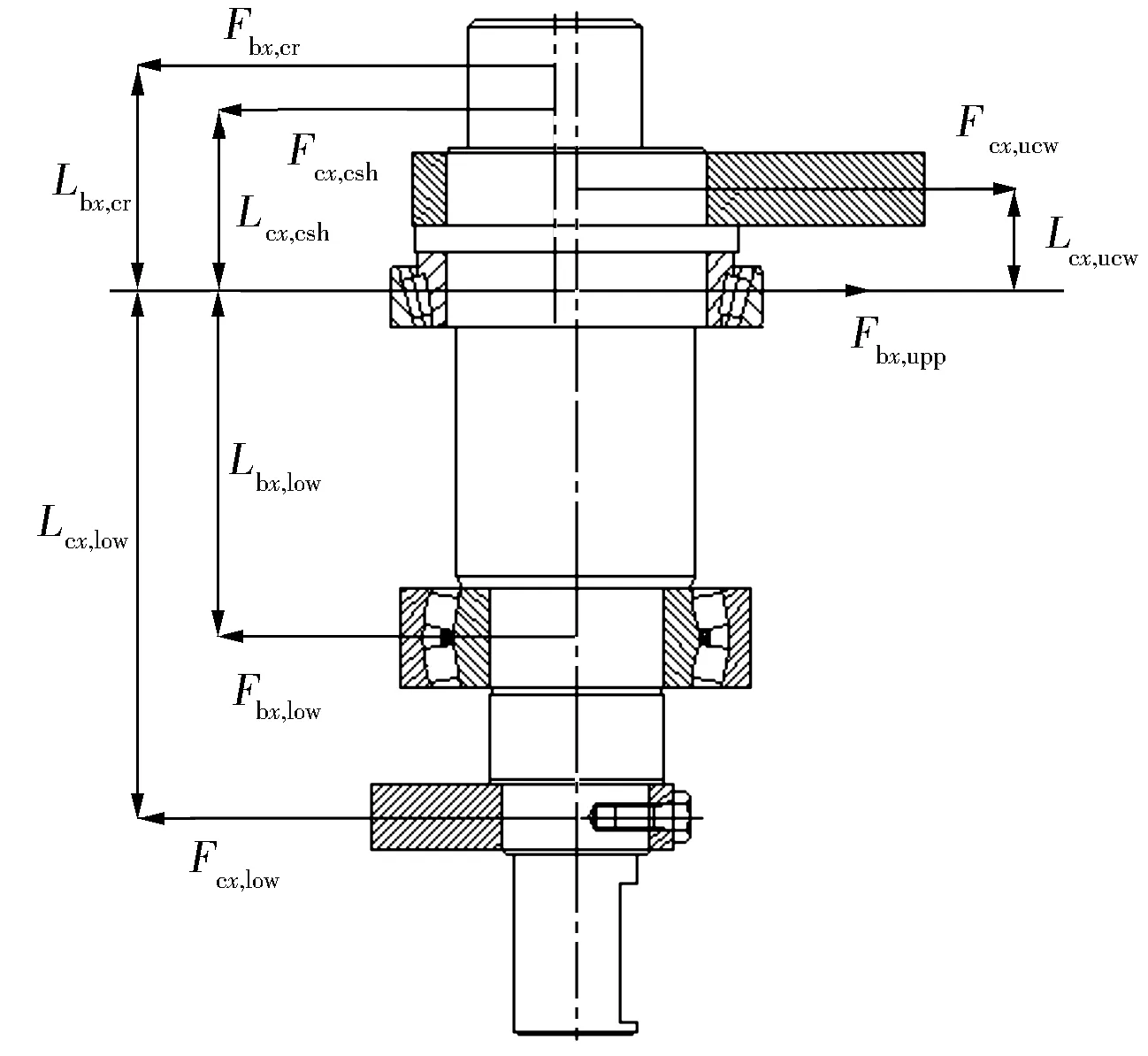
圖1 曲軸x方向受力分析
在x方向列力平衡式得:
Fbx,upp+Fcx,ucw-Fbx,cr-Fcx,csh-Fbx,low-Fcx,low=0
x方向分別對主軸承和副軸承取矩得:
Fbx,cr·Lbx,cr+Fcx,csh·Lcx,csh-Fcx,ucw·Lcx,ucw-Fbx,low·Lbx,low-Fcx,low·Lcx,low=0
Fbx,cr·(Lbx,cr+Lbx,low)+Fcx,csh·(Lcx,csh+Lbx,low)-Fcx,ucw·(Lcx,ucw+Lbx,low)-Fbx,upp·Lbx,low-Fcx,low·(Lcx,low-Lbx,low)=0
同理對y方向分別列力平衡式,主軸承、副軸承取矩得:
Fby,upp+Fcy,ucw-Fby,cr-Fcy,csh-Fby,low-Fcy,low=0
Fby,cr·Lby,cr+Fcy,csh·Lcy,csh-Fcy,ucw·Lcy,ucw-Fby,low·Lby,low-Fcy,low·Lcy,low=0
Fby,cr·(Lby,cr+Lby,low)+Fcy,csh·(Lcy,csh+Lby,low)-Fcy,ucw·(Lcy,ucw+Lby,low)-Fby,upp·Lby,low-Fcy,low·(Lcy,low-Lby,low)=0
已知:






2 轉(zhuǎn)子的有限元分析
根據(jù)曲柄銷防自轉(zhuǎn)機構(gòu)的渦旋壓縮機,試驗裝置中設(shè)計的動渦旋盤、曲柄銷和主軸承質(zhì)量之和md=7.03kg,主平衡鐵質(zhì)量mb1=1.54kg,副平衡鐵質(zhì)量mb2=0.51kg,主軸偏心量r=5mm,主平衡鐵質(zhì)心至主軸中心線的距離r1=50.71mm,副平衡鐵質(zhì)心至主軸中心線的距離r2=29.84mm,將不同轉(zhuǎn)速下md、mb1、mb2作用在偏心主軸上的離心力作為載荷導入ANSYS中,計算出不同轉(zhuǎn)速下曲軸軸肩的最大應(yīng)力和變形量,則最大應(yīng)力值和位移變形量隨轉(zhuǎn)速變化關(guān)系如圖2所示。
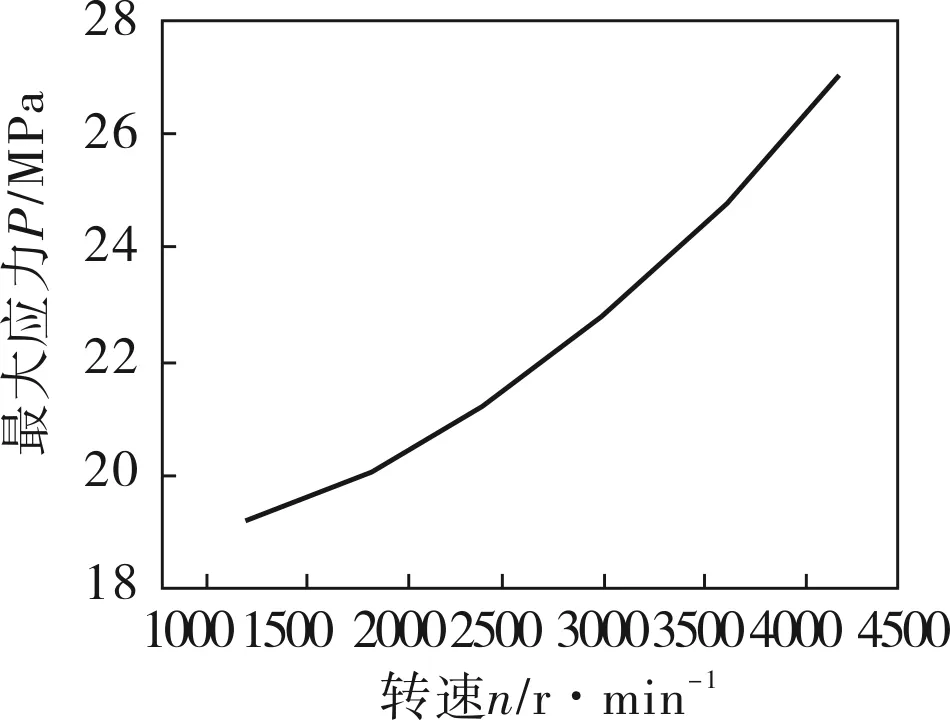
a. 最大應(yīng)力

b. 位移變形量
由圖2可以看出,整個曲軸轉(zhuǎn)子承受的最大應(yīng)力和由載荷引起的軸變形量均隨轉(zhuǎn)速的增大而不斷增加。為了探究轉(zhuǎn)子動力特性隨轉(zhuǎn)速的變化規(guī)律和曲柄銷防自轉(zhuǎn)機構(gòu)與曲軸的協(xié)同性,通過實時監(jiān)測曲軸轉(zhuǎn)子的運動狀態(tài),研究曲軸轉(zhuǎn)子的軸心軌跡及曲柄銷軸心運行狀態(tài),獲取影響轉(zhuǎn)軸動力特性的影響因素,為渦旋壓縮機的設(shè)計優(yōu)化提供理論參考。
為了能夠準確地反映出實際渦旋壓縮機的轉(zhuǎn)子動力特性,對試驗裝置轉(zhuǎn)子和壓縮機轉(zhuǎn)子進行受力分析和有限元計算,并將兩者的計算結(jié)果進行對比分析。
通過Pro/E軟件對轉(zhuǎn)子進行實體建模,三維模型如圖3所示,應(yīng)用ANSYS Workbench軟件對渦旋壓縮機轉(zhuǎn)子進行受力分析,分別如圖4、5所示。
由圖4a和圖5a可知:轉(zhuǎn)子發(fā)生變形的最大部位分別在動渦旋盤連接部位和電機連接部位。由圖4b、c和圖5b、c可知:曲軸上發(fā)生應(yīng)力集中現(xiàn)象的部位分別在退刀槽和軸肩處,最大應(yīng)力集中在曲軸的曲拐部位,該部位可為本試驗裝置中電渦流傳感器的安裝位置提供參考。

圖3 曲軸三維模型



圖4 樣機轉(zhuǎn)子位移、應(yīng)力、應(yīng)變圖



圖5 試驗裝置轉(zhuǎn)子位移、應(yīng)力、應(yīng)變圖
由筆者所選的渦旋壓縮機樣機和本試驗裝置的轉(zhuǎn)子動力特性分析可知,兩轉(zhuǎn)子最大變形部位和最大應(yīng)力集中處較為一致,因此該試驗裝置可以準確地反映實際轉(zhuǎn)子的動力特性。
3 試驗裝置的構(gòu)建
對渦旋壓縮機曲軸轉(zhuǎn)子和曲柄銷的監(jiān)測,需從硬件和軟件兩個方面進行研究。圖6為試驗臺整體構(gòu)造簡圖。試驗裝置主要由電機、曲軸、支架、電渦流傳感器、曲柄銷、動渦旋盤、靜渦旋盤及砝碼等組成。在試驗工況下通過調(diào)節(jié)變頻器來控制電機轉(zhuǎn)速,固定在支架上同一平面且相互垂直的兩個電渦流傳感器分別把曲軸轉(zhuǎn)子和曲柄銷的機械量轉(zhuǎn)換成電量,并將渦流信號送入前置器中,進行信號的放大、濾波及隔離等過程,處理過的渦流信號通過數(shù)據(jù)采集卡進行A/D(模擬信號/數(shù)字信號)轉(zhuǎn)換并進入計算機,供LabVIEW程序分析和處理,其軸心軌跡測試系統(tǒng)如圖7所示,該系統(tǒng)可通過調(diào)節(jié)變頻器來實現(xiàn)不同轉(zhuǎn)速下曲軸轉(zhuǎn)子和曲柄銷軸心軌跡的特性研究。

圖6 試驗臺整體構(gòu)造簡圖

圖7 軸心軌跡測試系統(tǒng)示意圖
對于互成90°安裝的兩個電渦流傳感器,設(shè)其檢測的轉(zhuǎn)子振動信號分別為X(t)、Y(t),在復(fù)數(shù)平面內(nèi)對這兩個信號進行組合,得Z(t)=X(t)+jY(t),則Z(t)即為轉(zhuǎn)子的軸心軌跡[8],由于Z(t)有機地綜合了X(t)和Y(t)信號中的內(nèi)在聯(lián)系,故Z(t)更能真實地刻畫轉(zhuǎn)子的振動行為。
3.1 硬件
3.1.1電渦流傳感器
電渦流傳感器是一種根據(jù)渦流效應(yīng)制成的傳感器,其最大特點就是能對位移、厚度及表面溫度等進行非接觸式測量[9]。選用的某電渦流傳感器主要參數(shù)為:
工作溫度 -50~175℃
最大工作壓力 12MPa
探頭直徑 5mm
線性范圍 0.25~1.25mm
線性量程 1mm
響應(yīng)頻率 0~10kHz
平均靈敏度 8V/mm
最小被測面 15mm(直徑)
安裝形式 M8螺紋連接
靈敏度誤差 ±5%
3.1.2信號調(diào)理
信號調(diào)理是為了分離噪聲等干擾信號,以便準確提取出有關(guān)被測對象的有用信息。在本系統(tǒng)曲軸轉(zhuǎn)子和曲柄銷振動信號采集過程中,采集的信號強度通常很微弱并伴有噪聲等干擾信號,故在A/D轉(zhuǎn)換前須經(jīng)信號調(diào)理,信號調(diào)理包括對信號的放大、隔離、濾波及線性化等。本系統(tǒng)采用NI公司的SCXI調(diào)理模塊,該模塊有4個均帶有激勵源的輸入通道,并為測量系統(tǒng)提供0.1mA恒定電流。
3.1.3數(shù)據(jù)采集卡
數(shù)據(jù)采集卡是外界信號進入計算機的橋梁,在這個橋梁中要完成A/D轉(zhuǎn)換以及信號放大等功能[10]。本系統(tǒng)采用NI公司的PCI-6221數(shù)據(jù)采集卡。該卡具有差分模擬輸入和兩路模擬輸出,輸入電壓范圍±10V,采樣率250kS/s,通道數(shù)單端16路,雙端8路,數(shù)字觸發(fā)。
3.2 軟件
LabVIEW是一種用圖標代替文本創(chuàng)建應(yīng)用程序的圖形化編程語言,它用圖標表示函數(shù),連線表示數(shù)據(jù)流向,一個LabVIEW的VI由前面板、程序框圖和連線板組成[11]。本試驗編程采用模塊化編程方法,將該系統(tǒng)的各個功能進行分解,然后逐一編程,LabVIEW的主要功能模塊有:曲軸轉(zhuǎn)子和曲柄銷軸心軌跡的信號采集,數(shù)據(jù)讀寫及軸心軌跡信號的顯示、分析和存儲等(圖8)。

圖8 軸心軌跡信號采集系統(tǒng)流程
軸心軌跡信號采集部分可對各項參數(shù)進行設(shè)定,如對x軸和y軸兩路信號采用雙通道進行采集,使用DAQmx模塊下的相關(guān)VI編程采集電渦流傳感器傳入的數(shù)據(jù),兩路信號采用Index Array函數(shù)分別進行索引。由于周期信號之間存在譜泄漏,為解決這一現(xiàn)象對采集信號采用加窗處理,本試驗裝置設(shè)計了Hanning窗、Hamming窗、Blackman窗、Triangle窗及Flap Top窗等19種窗函數(shù)類型可供不同工況的測試。本試驗裝置還設(shè)計了Bandstop、Bandpass、Lowpass、Highpass 4種濾波器類型,可分別對外界不同干擾信號進行濾波等設(shè)定。設(shè)定完后點擊LabVIEW中的運行按鈕進行測量采集,在整個軟件界面中可實時采集曲軸轉(zhuǎn)子和曲柄銷的軸心軌跡信號及x方向、y方向振動信號等。數(shù)據(jù)讀寫部分用Graph控件分別顯示x、y方向的信號,同時采用XY Graph控件顯示x、y方向的疊加信號,并采用TDMS文件對波形圖中顯示的軸心軌跡信號進行讀寫和存儲。信號分析則通過前面板上顯示的波形圖(x、y兩路信號的功率譜圖、自相關(guān)圖及互相關(guān)圖等)對曲軸轉(zhuǎn)子和曲柄銷軸心軌跡進行分析,并利用express VI函數(shù)呈現(xiàn)出已采集軸心軌跡信號的x、y向正峰值、反峰值以及峰峰值。圖9為曲軸軸心軌跡測試系統(tǒng)的前面板圖,該程序可通過設(shè)置前面板上的參數(shù)來實現(xiàn)不同轉(zhuǎn)速下的曲軸軸心軌跡位移信號的采集與分析。

圖9 曲軸轉(zhuǎn)子測試系統(tǒng)前面板
由圖9可知:渦旋壓縮機曲軸轉(zhuǎn)子的軸心軌跡包含了豐富的轉(zhuǎn)子運動信息,通過改變模擬試驗條件,可以分別獲得曲軸轉(zhuǎn)子在不同運動狀態(tài)下的軸心軌跡圖、曲軸轉(zhuǎn)子的振動幅值及其方向、低通截止頻率和高通截止頻率等,從而可以定性以及定量地判斷曲柄銷防自轉(zhuǎn)機構(gòu)與曲軸轉(zhuǎn)子運動的協(xié)同性和渦旋壓縮機曲軸轉(zhuǎn)子的平衡與非平衡狀態(tài)及其故障類型。如由x、y方向功率譜圖形關(guān)系知,x、y方向振動信號的主要頻率分別為19.1、19.7Hz,接近轉(zhuǎn)子轉(zhuǎn)頻20.0Hz,說明這是由于電機周期性激發(fā)所引起的振動。由x、y方向自相關(guān)、互相關(guān)圖形關(guān)系知,x、y方向上的振動信號存在較大的相關(guān)性并且兩信號都含有周期成分。
4 結(jié)束語
根據(jù)渦旋壓縮機的轉(zhuǎn)子動力特性和工作原理,通過理論建模和分析,設(shè)計了一種由電渦流傳感器和虛擬儀器構(gòu)成的轉(zhuǎn)子動力特性試驗測試平臺。該平臺可判斷曲柄銷防自轉(zhuǎn)機構(gòu)與曲軸轉(zhuǎn)子運動的協(xié)同性并分析引起渦旋壓縮機曲軸轉(zhuǎn)子振動的原因,對預(yù)防機器故障和故障診斷有著重要的理論意義和實際意義。相比于傳統(tǒng)的信號采集系統(tǒng),由電渦流傳感器和虛擬儀器構(gòu)成的轉(zhuǎn)子動力特性測試系統(tǒng)具有測量精度高、自動化程度高、成本低廉及便于維護等優(yōu)點。
[1] 李超,李崢,劉興旺,等.低壓腔型渦旋壓縮機潤滑系統(tǒng)研究[J].化工機械,2013,40(5):612~616.
[2] 李超,鄭尚書,趙嫚,等.渦旋壓縮機小曲拐防自轉(zhuǎn)機構(gòu)動力特性分析[J].中國機械工程,2014, 25(2): 236~241.
[3] 宋天虹,鄭尚書.渦旋壓縮機曲軸動力特性研究[J].石油化工設(shè)備,2013,42(1):18~21.
[4] 胡萍,王珍,趙之海,等.基于模態(tài)分析的渦旋壓縮機曲軸固有特性研究[J].壓縮機技術(shù),2007,(6):5~7.
[5] 余洋,李超,趙嫚.渦旋壓縮機曲軸轉(zhuǎn)子殼體耦合動力學研究[J].振動、測試與診斷,2013,33(z1):23~27,216.
[6] 嚴黎堅,黃志剛,張京.渦旋壓縮機曲軸有限元分析[J].電器,2011,(z1):342~348.
[7] 李超,孫照嵐,趙嫚.無油潤滑渦旋壓縮機動靜渦旋端面摩擦測試裝置[J].化工機械,2014,41(2):180~183.
[8] 程珩,杜嵐松.旋轉(zhuǎn)機械軸心軌跡故障診斷[J].太原理工大學學報,2003,34(5):552~554.
[9] 楊啟超,李連生,趙遠揚,等.電渦流法測量渦旋壓縮機軸向間隙的可行性試驗研究[J].中國機械工程,2007,18(17):2017~2020.
[10] 方琪.基于LabVIEW的無油潤滑渦旋壓縮機動力特性參數(shù)測試系統(tǒng)的研究[D].蘭州:蘭州理工大學,2012.
[11] 陳錫輝,張銀鴻.LabVIEW 8.20程序設(shè)計從入門到精通[M].北京:清華大學出版社,2007.
TestingDeviceforRotorDynamicCharacteristicsofScrollCompressors
LI Chao, NIU Hong-tao, LEI Jie, REN Yan-ling
(SchoolofPetrochemicalEngineering,LanzhouUniversityofTechnology,Lanzhou730050,China)
For purpose of investigating rotor’s dynamic property of scroll compressors, the crankshaft was taken as the object of study and the crankshaft’s mechanical model and the test device were established for scroll compressors; and ANSYS software was adopted to have force and displacement variation of the prototype and the test device’s rotor obtained; and according to scroll compressor’s working principle and based on the eddy current sensor, the test platform was built and LabVIEW programming was applied to collect, analyze and store the test device rotor’s vibration displacement signals. The test device can timely reflect rotor’s motion characteristics of the scroll compressor and display rotor’s locus and waveforms and power spectrum of the vertical displacement signals as well as determine rotor’s fault type upon the orbit of shaft center. This has theoretical and practical significance to the prevention of machine fault and fault diagnosis.
scroll compressor, rotor vibration, sensor, LabVIEW
*國家自然科學基金項目(51265026)。
**李 超,男,1958年3月生,教授。甘肅省蘭州市,730050。
TQ051.21
A
0254-6094(2016)04-0446-06
2015-09-17)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06