基于改進(jìn)滑模策略永磁同步電機SVM-DTC控制*
2016-12-23 07:27:48孫運全羅青松劉恩杰
電子器件 2016年6期
關(guān)鍵詞:系統(tǒng)
孫運全,羅青松,劉恩杰
(江蘇大學(xué)電氣與信息工程學(xué)院,江蘇鎮(zhèn)江212013)
基于改進(jìn)滑模策略永磁同步電機SVM-DTC控制*
孫運全*,羅青松,劉恩杰
(江蘇大學(xué)電氣與信息工程學(xué)院,江蘇鎮(zhèn)江212013)
傳統(tǒng)的永磁同步電機直接轉(zhuǎn)矩控制采用雙滯環(huán)結(jié)構(gòu),因而電機轉(zhuǎn)矩和磁鏈脈動較大。SVM控制方法通過合成最合理的電壓矢量對轉(zhuǎn)矩和磁鏈作精確補償,能夠一定程度上降低二者的脈動,但傳統(tǒng)SVM控制方法包含了轉(zhuǎn)速和轉(zhuǎn)矩兩個PI調(diào)節(jié)器,兩個調(diào)節(jié)器的參數(shù)設(shè)計比較復(fù)雜,且直接影響了電機性能。提出用快速終端滑模(FTSM)控制器來代替?zhèn)鹘y(tǒng)PI轉(zhuǎn)速調(diào)節(jié)器,為了克服滑模帶來的抖振,設(shè)計負(fù)載轉(zhuǎn)矩觀測器,并將觀測值反饋至滑模控制器。仿真和實驗結(jié)果表明所提控制方法改善了系統(tǒng)的動靜態(tài)性能,抗干擾能力增強,同時SMC固有抖振現(xiàn)象得到有效抑制。
永磁同步電機;直接轉(zhuǎn)矩;快速終端滑模;負(fù)載轉(zhuǎn)矩觀測器;空間矢量脈寬調(diào)制
永磁同步電機PMSM(Permanent Magnet Synchro?nous Motor)以其體積小、結(jié)構(gòu)可靠、運行效率高等突出優(yōu)點受到了人們越來越多的關(guān)注,在航空航天、家用電器、數(shù)控機床等領(lǐng)域獲得了廣泛運用[1-2]。永磁同步電機的直接轉(zhuǎn)矩方案具有結(jié)構(gòu)簡單、轉(zhuǎn)矩響應(yīng)快、對電機參數(shù)魯棒性好等優(yōu)點,所以受到眾多學(xué)者的關(guān)注。傳統(tǒng)的直接轉(zhuǎn)矩控制雖然具有很多突出優(yōu)點,卻是以犧牲轉(zhuǎn)矩和磁鏈的控制精度為代價的。為了解決這些問題,眾多學(xué)者做了大量工作,提出了基于空間矢量調(diào)制技術(shù)的直接轉(zhuǎn)矩控制SVM-DTC(Direct Torque Control based on Space Vector Modulation)方案[3-5],該方案在一定程度上降低了轉(zhuǎn)矩和磁鏈脈動。
為了克服傳統(tǒng)SVM控制方法中PI調(diào)節(jié)器在控制方面的欠缺[6],國內(nèi)外學(xué)者將現(xiàn)代控制理論中的一些新方法引入了PMSM-DTC系統(tǒng)中,這些方法主要有滑模控制(SMC)、模糊控制、神經(jīng)網(wǎng)絡(luò)等等,它們?yōu)镈TC算法注入了新的活力,對提高系統(tǒng)靜、動態(tài)性能起到了一定作用[7-8]。由于滑模變結(jié)構(gòu)控制對系統(tǒng)的參數(shù)變化和外界擾動具有完全的自適應(yīng)性,適用于解決非線性系統(tǒng)運動跟蹤、不確定系統(tǒng)控制等問題,因此被人們引入PMSM-DTC系統(tǒng)來改善系統(tǒng)性能。
本文從實際應(yīng)用角度,根據(jù)PMSM直接轉(zhuǎn)矩調(diào)速系統(tǒng)的特點,設(shè)計了一種快速終端滑模控制器來代替?zhèn)鹘y(tǒng)的PI控制器。SMC系統(tǒng)抗干擾能力的增強是通過增大切換增益來實現(xiàn),而切換增益的增大會使系統(tǒng)的固有抖振增強[9]。為了解決二者矛盾,設(shè)計一種負(fù)載滑模觀測器,將觀測到的負(fù)載轉(zhuǎn)矩值融入滑模控制器中,降低切換增益的幅值,有效抑制了控制器的抖振。搭建永磁同步電機控制系統(tǒng),仿真和實驗結(jié)果表明,所提出的控制策略能快速精確跟蹤系統(tǒng)給定速度,改善了系統(tǒng)的動靜態(tài)性能,抗干擾能力增強,同時SMC固有抖振現(xiàn)象得到有效抑制。
1 永磁同步電機數(shù)學(xué)模型
以面貼式PMSM為例,為了盡可能降低電機結(jié)構(gòu)的復(fù)雜度,忽略鐵芯等因素影響,αβ軸系下,電壓方程為:
定義反電動勢為:
轉(zhuǎn)矩方程為:

電機的運動方程如下:

式中,uα、iα、ψα、eα和uβ、iβ、ψβ、eβ分別為α軸與β軸上定子電壓、電流、磁鏈及反電動勢的分量;Rs與Ls分別為定子電阻和電感;Te為電磁轉(zhuǎn)矩;ψf為轉(zhuǎn)子磁鏈;ω為轉(zhuǎn)子的電角速度;θr為α軸與d軸夾角,即轉(zhuǎn)子位置角;TL為負(fù)載轉(zhuǎn)矩;J為轉(zhuǎn)動慣量;np為極對數(shù)。
2 基于改進(jìn)滑模策略永磁同步電機SVM-DTC系統(tǒng)及預(yù)期電壓矢量原理
采用改進(jìn)滑模控制器的永磁同步電機SVMDTC系統(tǒng)如圖1所示。速度傳感器得到的電機實際速度與給定速度比較后其差值經(jīng)過滑模控制器得到給定轉(zhuǎn)矩,而負(fù)載轉(zhuǎn)矩滑模觀測器所觀測負(fù)載轉(zhuǎn)矩值反饋至滑模控制器,快速跟蹤負(fù)載轉(zhuǎn)矩變化,使抗干擾能力增強的同時抑制了滑模固有抖振。利用比較所得到的電磁轉(zhuǎn)矩誤差經(jīng)過PI調(diào)節(jié)器得出轉(zhuǎn)矩角變化量,計算預(yù)期電壓矢量[10]作為SVPWM的控制輸入來實現(xiàn)轉(zhuǎn)矩和磁鏈的控制。其中預(yù)期電壓矢量的生成、控制及抑制轉(zhuǎn)矩脈動原理分析如下。
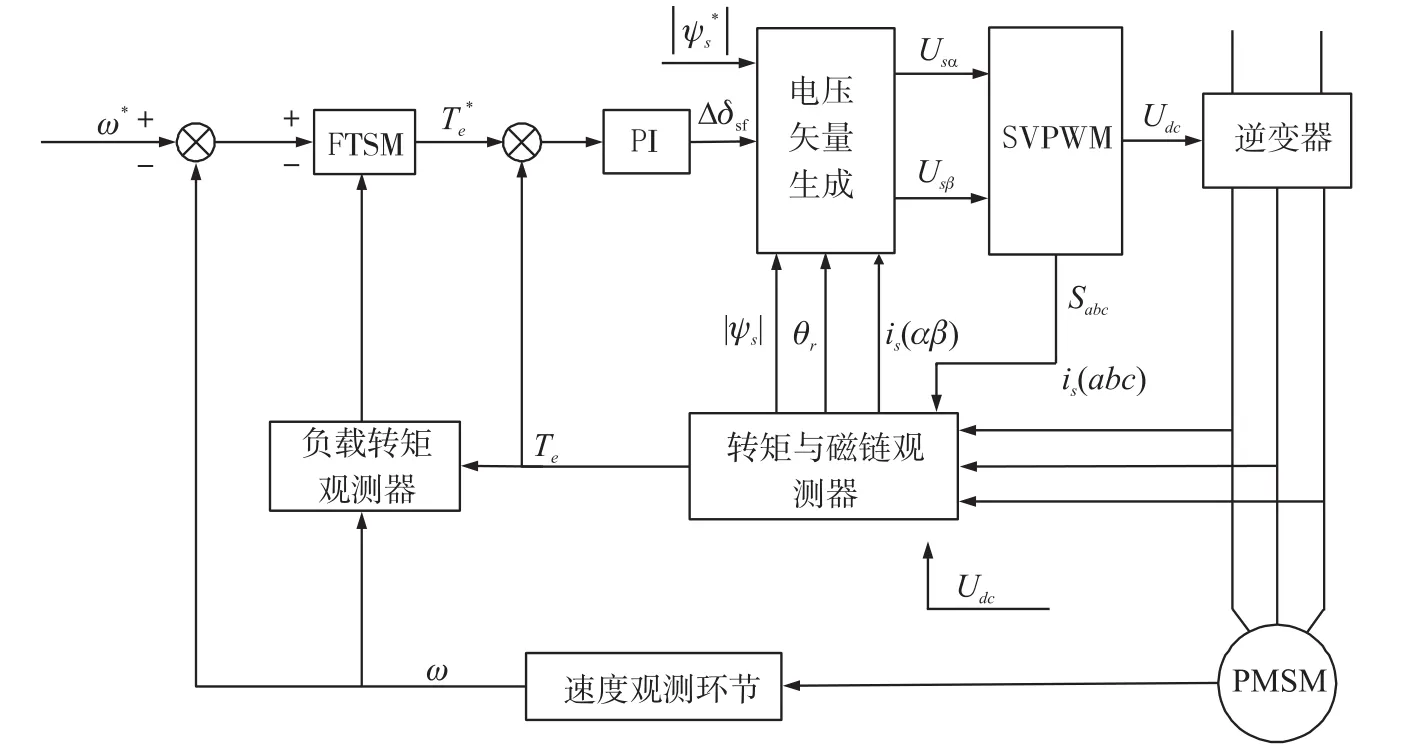
圖1 采用模糊滑模控制的永磁同步電機SVM-DTC系統(tǒng)
PMSM運行時的磁鏈?zhǔn)噶咳鐖D2所示,其中ψs為實時觀測所得到的定子磁鏈?zhǔn)噶俊6xψref為目標(biāo)磁鏈?zhǔn)噶浚拈L度由定子磁鏈給定大小決定,方向為ψs的方向角θs加功率角增量Δδsf。而Δδsf是由實時觀測的電磁轉(zhuǎn)矩Te與給定轉(zhuǎn)矩之誤差經(jīng)轉(zhuǎn)矩調(diào)節(jié)器而得,包含了轉(zhuǎn)矩的調(diào)節(jié)信息。因而目標(biāo)磁鏈?zhǔn)噶喀譺ef同時包含了磁鏈和轉(zhuǎn)矩的校正信息,故只要令觀測到的磁鏈?zhǔn)噶喀譻不斷跟蹤目標(biāo)磁鏈?zhǔn)噶喀譺ef即可達(dá)到實時控制轉(zhuǎn)矩和磁鏈的目的。
在圖2中,將ψs與ψref的關(guān)系ψref=ψs+Δψs寫成αβ軸的分量形式,得:

又在SVPWM的一個采樣周期Ts內(nèi),將定子磁鏈的電壓模型寫成αβ軸的分量形式,得:

聯(lián)立式(5)、式(6)即可根據(jù)誤差實時生成所需的連續(xù)可變的預(yù)期電壓矢量u→s作為SVPWM控制的輸入,從而達(dá)到磁鏈與轉(zhuǎn)矩的調(diào)節(jié)目標(biāo)。可以看出,與傳統(tǒng)DTC相比,這種SVM-DTC的控制方式不但可以使逆變器的開關(guān)頻率恒定,更可以實時根據(jù)轉(zhuǎn)矩與磁鏈誤差生成真正合適的電壓矢量,擴大了電壓矢量的選擇范圍。這從根本上克服了傳統(tǒng)方法只使用8個基本電壓矢量的選擇范圍,因而較好地解決了DTC轉(zhuǎn)矩與磁鏈的脈動問題。而改進(jìn)滑模控制器的應(yīng)用在抑制滑模抖振的前提下提高了傳統(tǒng)SVM存在的動靜態(tài)性能及抗干擾能力。
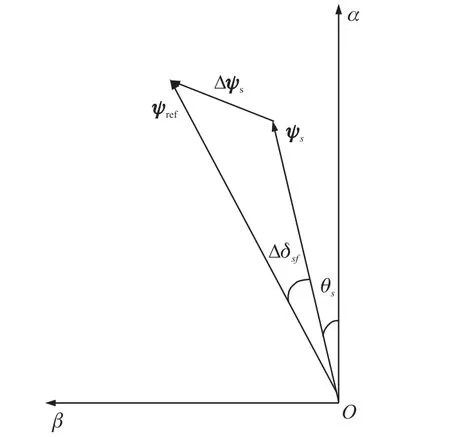
圖2 磁鏈在αβ軸的分量
3 改進(jìn)滑模控制器的設(shè)計
3.1 滑模控制器的設(shè)計[11]
滑模變結(jié)構(gòu)控制系統(tǒng)的運動包括趨近運動和滑模運動兩部分。趨近運動是系統(tǒng)在連續(xù)控制下的正常運動階段,它在狀態(tài)空間中的運動軌跡全部位于切換面以外,或者有限穿越切換面;滑模運動是系統(tǒng)在切換面附近,且沿切換面向穩(wěn)定點運動的階段。
設(shè)計滑模變結(jié)構(gòu)控制器的基本步驟包括個相對獨立的部分:
(1)設(shè)計切換函數(shù)是s(x),使它所確定的滑動模態(tài)漸進(jìn)穩(wěn)定且具有良好的動態(tài)品質(zhì);
(2)設(shè)計滑動模態(tài)控制律u±(x),使得到達(dá)條件得到滿足,從而在切換面上形成滑動模態(tài)區(qū)。一旦切換函數(shù)s(x)和滑動模態(tài)控制律都得到了,滑動模態(tài)控制系統(tǒng)就能完全建立起來。
本文通過采用快速終端滑模[12]的控制方法,選擇給定轉(zhuǎn)矩作為控制量,設(shè)計滑模面為:

式中,e=ω*-ω,其中ω*是轉(zhuǎn)速給定,?,γ是正數(shù),p和q是正奇數(shù),且有1<p/q<2,當(dāng)轉(zhuǎn)子轉(zhuǎn)速ω準(zhǔn)確跟蹤給定轉(zhuǎn)速ω*時可以得到e=0。
則該系統(tǒng)是穩(wěn)定的,其中k1>0,k2>0,k3>0。

由式(4)可得:

則有:

對式(12)兩邊求導(dǎo):

將式(12)~式(14)代入式(11)可得:

最后,將快速終端滑模控制律代入式(14)得:

根據(jù)Lyapunov穩(wěn)定性定理可知,系統(tǒng)穩(wěn)定的條件為k2>0,k3>0。
很顯然,采用以上控制律,本系統(tǒng)可以在有限時間內(nèi)到達(dá)穩(wěn)定狀態(tài),也就是說,e將會收斂到零,而速度ω也會準(zhǔn)確跟蹤到給定速度ω*。
3.2 負(fù)載轉(zhuǎn)矩滑模觀測器的設(shè)計
上面已經(jīng)進(jìn)行了滑模控制器的設(shè)計與驗證。當(dāng)存在外界擾動時,可以通過選取較大的k1,k2,k3以提供足夠的給定轉(zhuǎn)矩來抑制電機速度變化,這樣的結(jié)果會加劇固有滑模抖振現(xiàn)象,因此設(shè)計了一種負(fù)載轉(zhuǎn)矩滑模觀測器來實時監(jiān)測負(fù)載擾動,將其變化及時反饋至滑模控制器,抗外界擾動的同時抑制了滑模抖振。
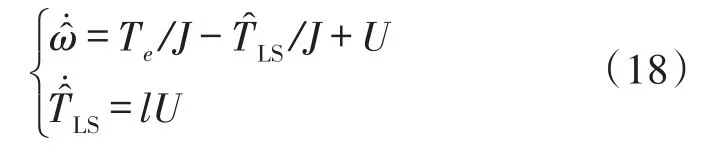
根據(jù)式(4)所示PMSM轉(zhuǎn)矩與運動方程,將負(fù)載轉(zhuǎn)矩和摩擦轉(zhuǎn)矩統(tǒng)為一個整體進(jìn)行觀測,得電機擴展?fàn)顟B(tài)方程為:

式中:TLS為負(fù)載轉(zhuǎn)矩和摩擦轉(zhuǎn)矩之和,稱為負(fù)載轉(zhuǎn)矩,由于控制器的頻率很高,所以認(rèn)為一個周期內(nèi)負(fù)載轉(zhuǎn)矩為恒定值,即=0。將電機轉(zhuǎn)速和負(fù)載轉(zhuǎn)矩作為狀態(tài)變量,在式(17)的基礎(chǔ)上建立擴展滑模觀測器為:
將式(18)與式(17)相減得到誤差方程為:

其中:e1=-ω為速度觀測誤差,且選它作為切換函數(shù),即有s=e1,滑模切換面為S(x)=0。e2=-TLS為負(fù)載轉(zhuǎn)矩觀測誤差。

簡化可得k的取值范圍為:

當(dāng)滑模觀測器進(jìn)入滑動模態(tài),即s=s?=0,代入式(19)可得:

由式(22)可得:

式中:c為常數(shù),可見誤差e2隨時間趨向于零,速度取決于l的大小。負(fù)載轉(zhuǎn)矩觀測器的結(jié)構(gòu)框圖如圖3所示。
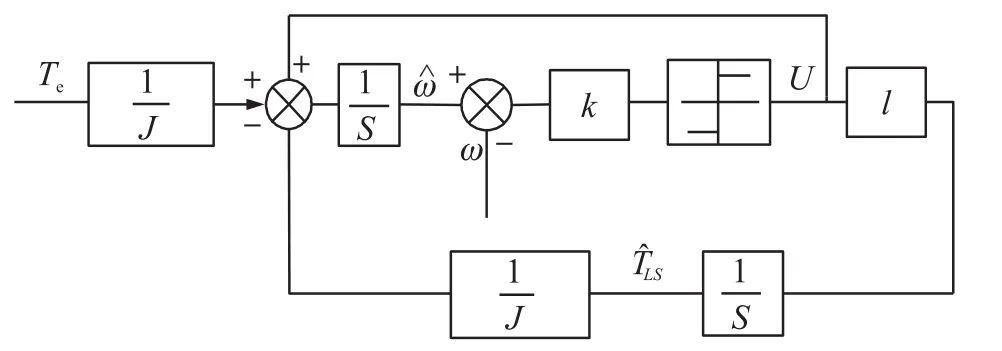
圖3 負(fù)載轉(zhuǎn)矩觀測器框圖
4 仿真與實驗結(jié)果分析
4.1 仿真結(jié)果分析
為了驗證本文所設(shè)計模糊滑模控制算法的正確性,對PMSM調(diào)速系統(tǒng)進(jìn)行了仿真,所采用的電機參數(shù)為:極對數(shù)np=4,定子電阻Rs=1.3 Ω,d軸電感Ld等于q軸電感Lq,即Ld=Lq=3.6 mH,永磁體磁鏈ψf=0.175Wb,轉(zhuǎn)動慣量J=0.000 8 kg·m2,摩擦系數(shù)Bm=0。快速終端滑模控制器的參數(shù)為:γ=150,p/q=1.2,k1=200,k2=80,k3=50。
比較各種情況下系統(tǒng)的仿真結(jié)果:
(1)當(dāng)電機在給定轉(zhuǎn)速下穩(wěn)定運行,突增負(fù)載到10 N·m時負(fù)載轉(zhuǎn)矩滑模觀測器的觀測值如圖4所示,由圖可知,負(fù)載滑模觀測器能快速、準(zhǔn)確地觀測到負(fù)載轉(zhuǎn)矩的變化。
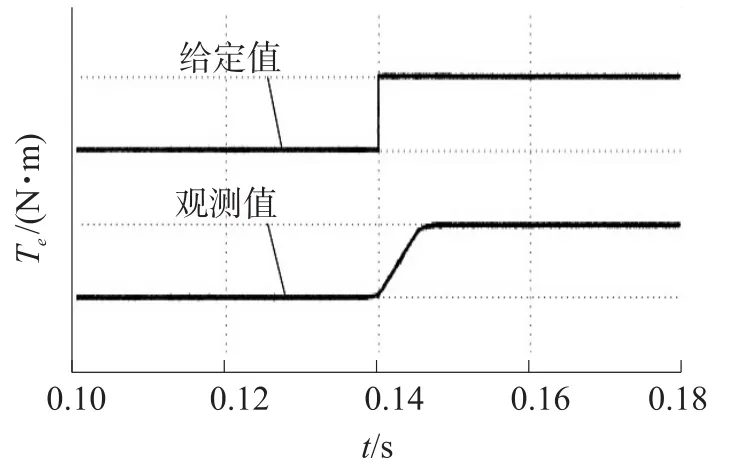
圖4 轉(zhuǎn)矩觀測值與實際值
(2)當(dāng)電機給定速度n=800 r/min,外加負(fù)載TL從10 N·m突變到15 N·m時基于模糊滑模的SVM-DTC與傳統(tǒng)的SVM-DTC調(diào)速系統(tǒng)的仿真結(jié)果如圖5、圖6所示,從結(jié)果可以看出,采用模糊滑模調(diào)速系統(tǒng)比傳統(tǒng)的動態(tài)響應(yīng)性能更優(yōu),轉(zhuǎn)速迅速上升且超調(diào)較小,當(dāng)負(fù)載突變時,系統(tǒng)恢復(fù)平衡穩(wěn)定所需時間更短。
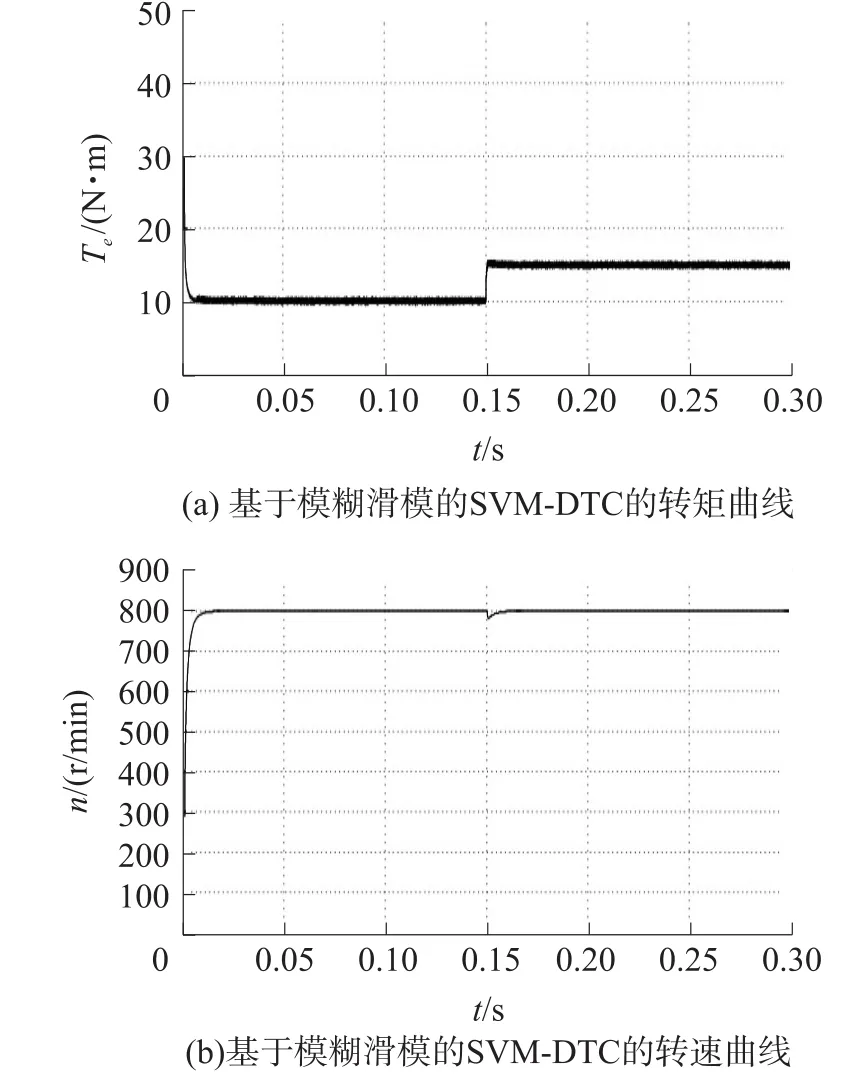
圖5 變載時基于模糊滑模的SVM-DTC的轉(zhuǎn)矩、轉(zhuǎn)速曲線
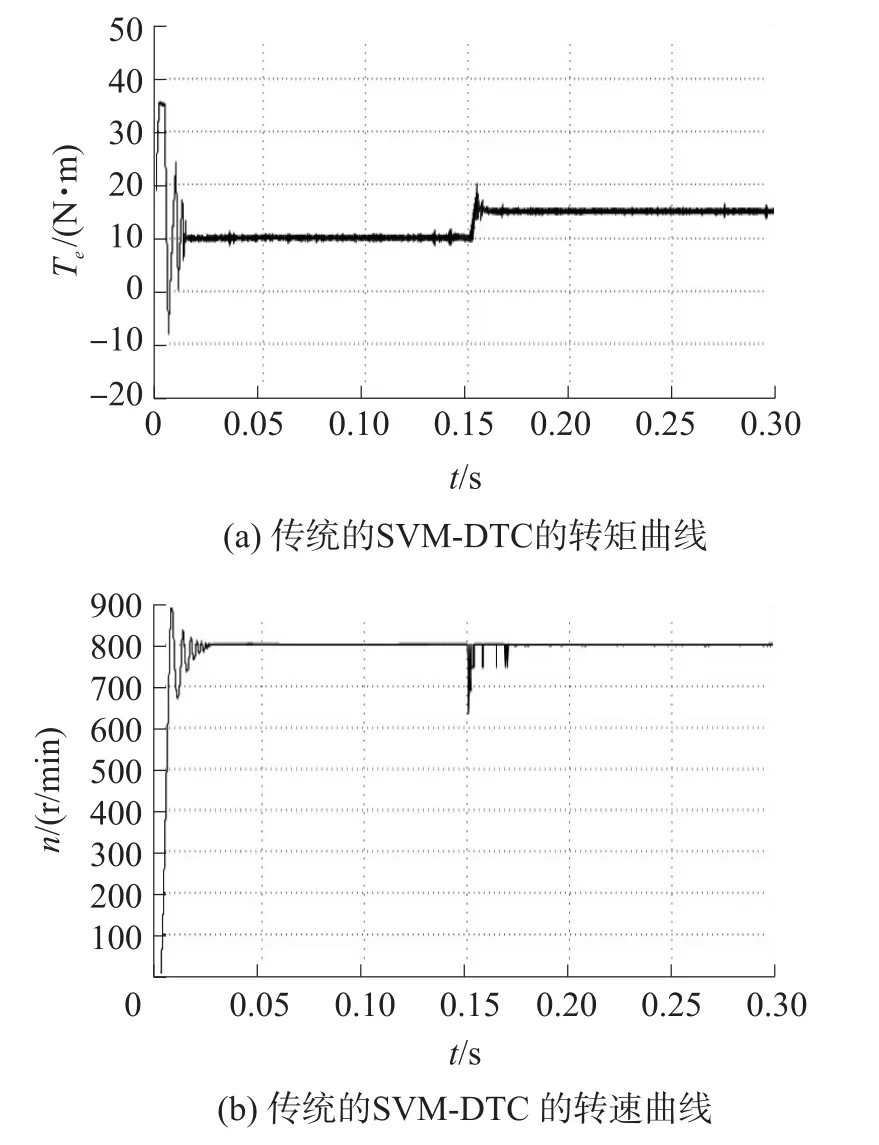
圖6 變載時傳統(tǒng)的SVM-DTC的轉(zhuǎn)矩、轉(zhuǎn)速曲線
(3)電機帶負(fù)載 TL=10 N,給定速度從n= 800 r/min突變到n=400 r/min時的仿真結(jié)果如圖7、圖8所示,從仿真結(jié)果可以看出,當(dāng)電機給定速度發(fā)生突變時,采用滑模控制器的調(diào)速系統(tǒng)更快重新達(dá)到穩(wěn)定狀態(tài),轉(zhuǎn)矩和速度振動的幅值較小。
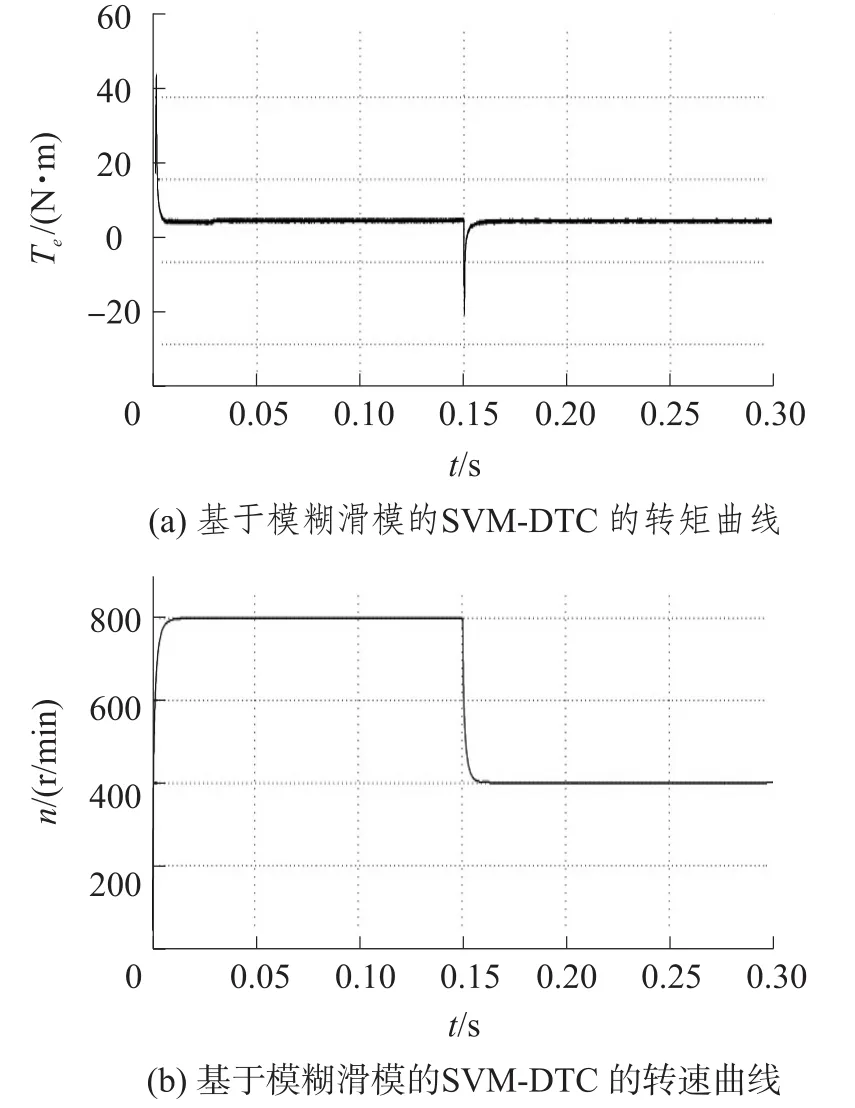
圖7 變速時基于模糊滑模的SVM-DTC的轉(zhuǎn)矩、轉(zhuǎn)速曲線
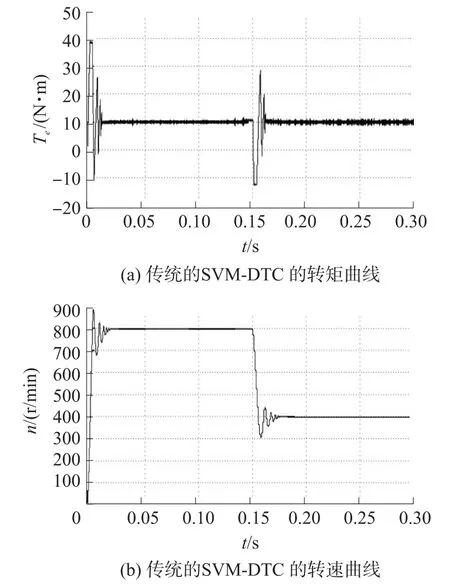
圖8 變速時傳統(tǒng)的SVM-DTC的轉(zhuǎn)矩、轉(zhuǎn)速曲線
4.2 實驗結(jié)果分析
根據(jù)圖1所示的控制策略構(gòu)建系統(tǒng),整個系統(tǒng)是采用基于TMS320F2812 DSP芯片的調(diào)速實驗平臺如圖9,對該控制策略進(jìn)行驗證實驗分析,永磁電機為2 kW,當(dāng)給定速度為500 r/min,負(fù)載轉(zhuǎn)矩為2 N·m的啟動波形如圖10,通道1為速度,通道2為轉(zhuǎn)矩,通道3為電流。速度控制系統(tǒng)啟動響應(yīng)快速且平穩(wěn),電機不到1 s后運行平穩(wěn)。

圖9 實驗平臺
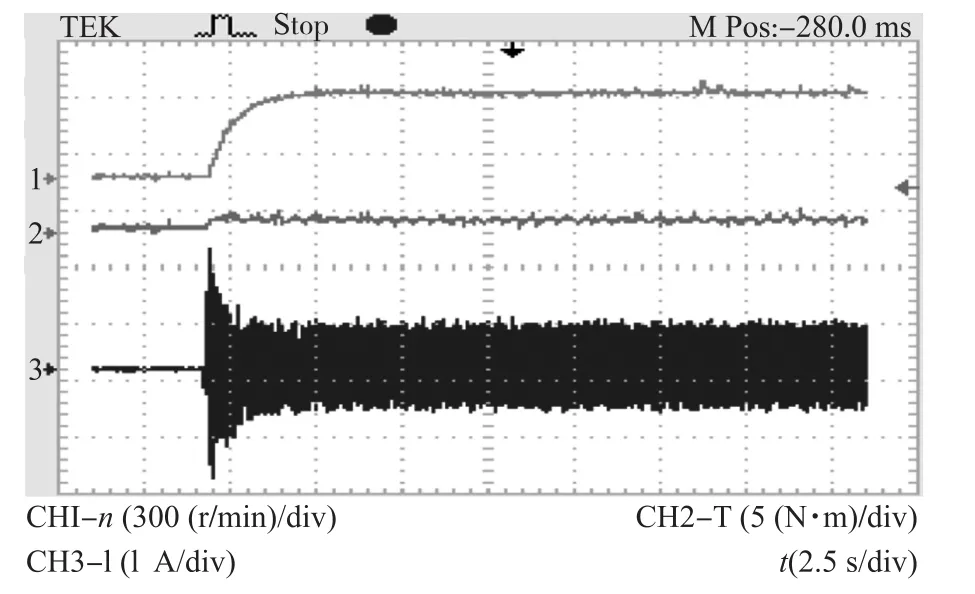
圖10 電機啟動曲線
系統(tǒng)穩(wěn)定運行在500 r/min過程中,突降負(fù)載實驗波形如圖11,可以看出,突降負(fù)載后,電機在經(jīng)過短時間調(diào)整后總能保持速度為原來的狀態(tài),速度波動不大,系統(tǒng)具有較強的抗負(fù)載沖擊能力。
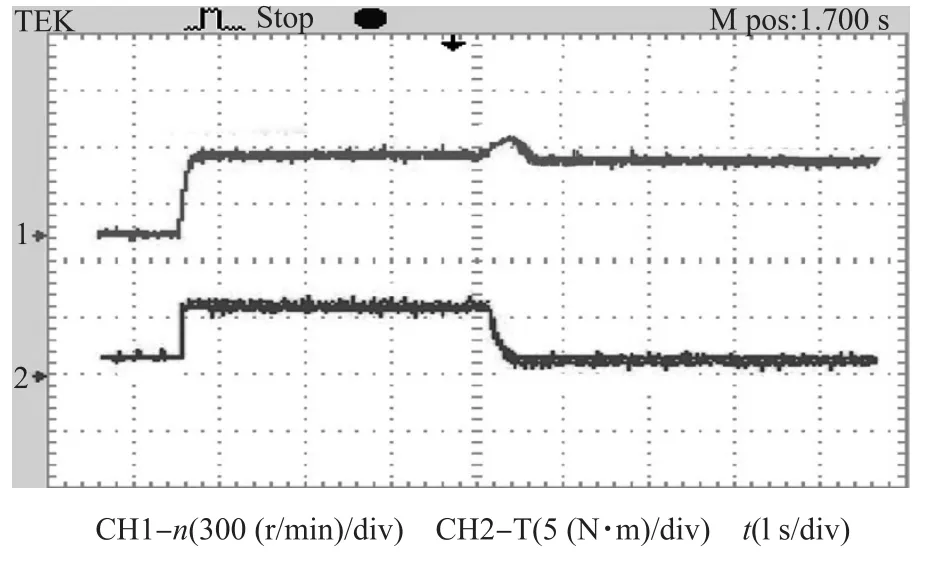
圖11 突降負(fù)載曲線
電機在600 r/min帶負(fù)載長時間穩(wěn)定運行一段時間,此時帶負(fù)載降速至200 r/min,圖12為對應(yīng)的波形,從圖中可以看出,電機的轉(zhuǎn)速過渡平穩(wěn),轉(zhuǎn)矩脈動較小,系統(tǒng)具有較強的抗干擾能力和魯棒性。
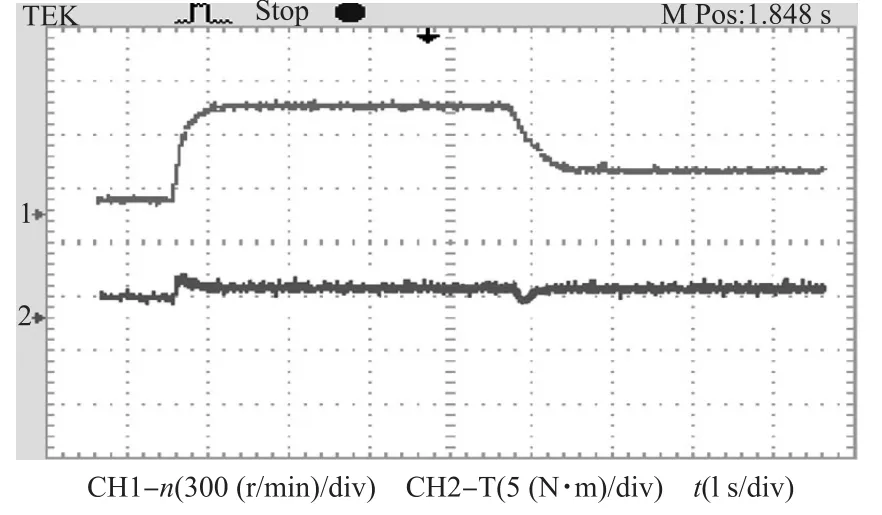
圖12 速度突變波形
5 結(jié)論
在深入分析永磁同步電機數(shù)學(xué)模型和控制方法的基礎(chǔ)上,提出了一種改進(jìn)方案的空間電壓矢量調(diào)制的永磁同步電機直接轉(zhuǎn)矩控制。采用快速終端滑模控制器來代替?zhèn)鹘y(tǒng)的PI控制器,解決了傳統(tǒng)的直接轉(zhuǎn)矩控制帶來的一系列問題,同時保證SVMDTC的優(yōu)良控制性能,提高了電機的動態(tài)響應(yīng)性能及靜態(tài)穩(wěn)定性,調(diào)速系統(tǒng)的抗外界干擾能力增強,魯棒性提高。結(jié)合負(fù)載滑模觀測器,將觀測到的負(fù)載轉(zhuǎn)矩值反饋到滑模控制器中,降低切換增益的幅值,在抗干擾能力增強的同時有效抑制了控制器的固有抖振。同時滑模控制器的使用避免了兩個PI調(diào)節(jié)器之間相互影響,參數(shù)整定復(fù)雜的問題。仿真和實驗結(jié)果證明了該控制策略的有效性。
[1]Rao J S,Sekhar S C,Raghu T.Speed Control of PMSM by Using DSVM-DTC Technique[J].International Journal of Engineering Trends and Technology,2012,3(3):281-285.
[2]韓建群,鄭萍.一種用于電動汽車的永磁同步電機直接轉(zhuǎn)矩控制的簡化方法[J].電工技術(shù)學(xué)報,2009,24(1):76-80.
[3]Zhong L,Rahman M F,Hu W Y,et al.A Direct Torque Controller for Permanent Magnet Synchronous Motor Drives[J].IEEE Trans?actions on Energy Conversion,1999,14(3):637-642.
[4]趙輝,魯超,馮金釗.基于SVPWM的永磁同步電機控制策略研究[J].電測與儀表,2009,46(7):13-16.
[5]Chunmei Z,Heping L,Shujin C,et al.Application of Neural Net?works for Permanent Magnet Synchronous Motor Direct Torque Control[J].Journal of Systems Engineering and Electronics,2008,19(3):555-561.
[6]孫強,程明,周鶚,等.新型雙凸極永磁電機調(diào)速系統(tǒng)的變參數(shù)PI控制[J].中國電機工程學(xué)報,2003,23(6):117-122.
[7]王華,鄒積浩.基于模糊邏輯的直線永磁同步電機直接推力控制[J].電子器件,2008,33(6):2280-2283.
[8]陳碩,林小武.基于非奇異終端滑模的永磁同步電機無速度傳感器直接轉(zhuǎn)矩控制[J].福州大學(xué)學(xué)報(自然科學(xué)版),2013,41(5):875-881.
[9]劉穎,周波,方斯琛.基于新型擾動觀測器的永磁同步電機滑模控制[J].中國電機工程學(xué)報,2010,30(9):80-85.
[10]Sun D,Zhu J G,He Y K.A Space Vector Modulation Direct Torque Control for Permanent Magnet Synchronous Motor Drive Systems[C]//Power Electronics and Drive Systems,2003.PEDS 2003.The Fifth International Conference on.IEEE,2003,1:692-697.
[11]劉金琨.滑模變結(jié)構(gòu)控制MATLAB仿真[M].北京:清華大學(xué)出版社有限公司,2005.
[12]齊亮.基于滑模變結(jié)構(gòu)方法的永磁同步電機控制問題研究及應(yīng)用[D].華東理工大學(xué),2013.
孫運全(1969-),男,漢族,山東莒南人,教授,博士,研究方向電力系統(tǒng)電能質(zhì)量控制,新能源電動車輛控制等領(lǐng)域,sunyunquan99@126.com;

羅青松(1990-),男,漢族,湖北黃石人,碩士研究生,研究方向為電力電子與電力傳動,791182694@qq.com。
SVM-DTC System for PMSM Based on a Novel Sliding Mode Controller*
SUN Yunquan*,LUO Qingsong,LIU Enjie
(College of Electrical and Information Engineering,Jiangsu University,Zhenjiang Jiangsu 212013,China)
The traditional direct torque control(DTC)of permanent magnet synchronous motor adopts double hyster?esis control,thus the motor torque and stator linkage flux ripple are large.SVM control method is based on the accu?rate compensation of stator flux linkage and torque by synthesizing the most reasonable voltage vector,so it can re?duce the ripple to a certain extent.However,two PI regulators are included in traditional SVM method,one is speed regulator and the other is torque regulator.Design of Parameters of the two PI regulators is complex and the motor performance is affected by these Parameters directly.The paper used fast terminal sliding mode(FTSM)controller to replace the speed PI regulator.In order to reduce the chattering of sliding mode,a load torque observer which the observation used in the sliding mode control is designed.The simulation and experiment results show that the pro?posed control method can improve the dynamic and static performance of the system,and the system has a great im?munity.In the same time,the inherent chattering phenomenon is effectively suppressed.
permanent magnet synchronous moto;direct torque control(DTC);fast terminal sliding mode(FTSM);load torque observer;space voltage vector PWM(SVM)

TM351
A
1005-9490(2016)06-1531-06
8380
10.3969/j.issn.1005-9490.2016.06.048
項目來源:江蘇大學(xué)高級人才項目(13DG054)
2015-12-20 修改日期:2016-01-20
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32