大型薄壁件的多點支承/定位方法研究
2016-12-23 02:03:32王少鋒洪軍王建國李寶童楊朝暉
西安交通大學學報 2016年6期
王少鋒,洪軍,王建國,李寶童,楊朝暉
(1.內蒙古科技大學機械工程學院,014010,內蒙古包頭;2.西安交通大學機械制造系統工程國家重點實驗室,710049,西安;3.西北工業大學航空學院,710072,西安)
?
大型薄壁件的多點支承/定位方法研究
王少鋒1,2,洪軍2,王建國1,李寶童2,楊朝暉3
(1.內蒙古科技大學機械工程學院,014010,內蒙古包頭;2.西安交通大學機械制造系統工程國家重點實驗室,710049,西安;3.西北工業大學航空學院,710072,西安)
為了解析工件的加工變形與其多支承/定位點布局之間的內在關聯,提出了一種新穎的多點支承/定位布局優化方法。利用有限差分方法表征加工變形敏感度的思路,建立了工件加工變形對于支承/定位點布局的解析敏感度表達式,沿減小加工變形最敏感的方向調整支承/定位點分布,可以有效抑制工件加工變形、改善工藝系統剛度。以常見的大型薄壁件的多點支承/定位為研究案例,使用提出的方法對其多支承/定位點初始布局進行了搜索,以此作為全局優化初值,并對優化后的工件加工軌跡變形計算結果進行了比對,結果表明,工件最大加工變形被控制在0.669 4 mm內,相對優化前的1.022 mm減小了34.5%,由此驗證了該優化方法的正確性與合理性,并且為多支承/定位點布局優化的創新思維模式提供了理論指導。
薄壁件;多點定位;布局優化
大尺度合金或復合材料薄壁件常用作現代大型飛行器的外蒙皮,其制造過程一般采用先加工后成型工藝,但成型工序所引起的外輪廓大變形極易影響飛行器的氣動和隱身性能。
為克服上述問題,逐漸形成了先成型后加工的工藝,但成型后的半成品屬于弱剛度薄殼類零件,定位與支承難度增大,且面向剛性體的3-2-1的6點定位原理已不再適用。鑒于此,文獻[1]提出了N-2-1定位原理,削弱了薄壁工件在測量和化銑刻線等工藝過程中的變形;文獻[2-3]對上述研究進行了拓展,提出了X-2-1動態定位原理,旨在抑制切邊等工藝過程中部分定位點逐漸失效所導致的相應加工區域剛度減弱的狀況。從目前已查閱文獻的內容看,該理論對于如何尋找最優X的研究積累還不夠充分。
傳統的裝夾方案確定依賴于直觀判斷和經驗積累,或者有針對性地對工件弱剛度部位進行加固。其缺陷主要在于:弱剛度部位的針對性加固需長時間地嘗試和調整。為此,大量研究圍繞著工件裝夾定位布局的優化展開。文獻[4]以最小化加工位置處的結點變形總和為優化目標,實現了對工件靜態支承/定位點布局的優化。文獻[5]延伸了文獻[4]的研究,將優化目標修正為最小化工件法向變形的平方和。此外,文獻[6-7]提出了一種結合有限元計算迭代優化求解的遺傳算法,旨在解決工件多支承/定位點的布局優化及定位誤差與加工軌跡變形的最小化問題。類似地,文獻[8-9]通過遺傳算法實現了對工件已知支承/定位點布局的優化。由此可看出,上述研究不約而同地選定定位誤差與加工軌跡變形為工件支承/定位點布局優化的目標,但整個優化過程均在工件初始支承/定位點布局已知的條件下進行。然而,恰恰是獲取工件支承/定位點布局最優方案對其初始布局,即優化過程的初值異常敏感,因此上述方法往往只是一種改進,而不是全局最優方案。
本文依據課題組前期針對大型薄壁件多支承/定位點初始布局搜索算法的研究成果[10],確定薄壁工件支承/定位點的初始布局,將工件支承/定位點布局優化過程表達為旨在減小加工變形下的多支承/定位點調整問題。同時,設計了優化策略的數學表達,并研究分析了目標最優值與約束邊界之間的內在聯系,提出了工件多點支承/定位布局優化方法與流程,為裝配件的多點支承/定位布局優化提供了新的理論支持與依據。
1 多支承/定位點的初始布局方案
文獻[10]以滿足工件夾緊力和外形精度為目標,提出了跟隨加工區域布置支承/定位點策略,由此為大型薄壁件多支承/定位點布局的全局優化提供了一種可靠的支承/定位點初始布局方案。方案不僅實現了對工件不同加工區域定位誤差的針對性的重點防控,而且為進一步優化支承/定位點布局,以此控制工件加工變形、提高工藝系統剛度,為改善加工質量奠定了基礎。
本文4.1.1節給出了課題組前期研究案例中針對大型薄壁件定位的多支承/定位點初始布局方案搜索結果。
2 多支承/定位點布局優化策略設計
自然界植物的生長過程特性,如向重性、向水性和向氧性等,可被看作是一個具有功能目標自適應性的最優化過程。受此啟發,將大型薄壁件多支承/定位點布局的優化轉化為如何沿減小加工變形的最敏感方向調整支承/定位點分布的問題,由此實現工件加工路徑處的加工變形逐漸趨于最小。顯然,搜索減小加工變形的最敏感方向是該優化研究的關鍵。
2.1 優化策略設計
借鑒優化設計中的靈敏度概念,通過計算比較工件加工變形相對各支承/定位點單位量移動下的變化率,移動方向選為對應工裝各支承/定位柱的驅動方向,由此確定減小加工變形的最敏感支承/定位點及其移動方向,并以此作為裝配件多點支承/定位布局優化過程中應遵循的優化策略,即調整相應支承/定位點沿減小工件加工變形的最敏感方向移動。
為便于計算,使用中心差分對上述優化策略進行計算,以支承/定位點沿x軸移動的靈敏度為例
(1)
式中
Pi、Δpx分別表示第i號支承/定位點空間坐標與其沿x軸的單位移動增量。
支承/定位點沿y軸移動的靈敏度計算類似。
2.2 優化策略決策實例
基于式(1)所示工件多支承/定位點布局優化策略的數學內涵,構造如圖1所示的4支承/定位點的工件加工變形敏感度計算模型,以此分析相應支承/定位點沿x、y軸的移動對載荷受力處工件變形的影響,并實現對應靈敏度的計算。以#4支承/定位點的分析為例,分別將各支承/定位點沿x、y軸分別正、負偏置Δpx、Δpy時,分析對工件表面法向載荷受力處變形的影響,可得對應敏感度的計算結果,如表1所示。其他支承/定位點的計算類似。

材料:Al Alloy;彈性模量:70 GP;泊松比:0.3;單元:Shell[8]; 厚度:3 mm; ΔPx:20 mm; ΔPy:20 mm圖1 #4支承/定位點工件加工變形敏感度計算模型

定位/支承點SxSy1900×10-5900×10-52240×10-4535×10-43535×10-4240×10-44438×10-3438×10-3
由此可以看出,工件表面法向載荷受力處變形的波動相對#4支承/定位點沿y軸的單位增量移動最為敏感(Sy=4.38×10-3),而#1支承/定位點沿x、y軸的單位增量移動對于削弱載荷受力處變形幾乎無影響(Sx=Sy=0.9×10-5)。顯然,調整支承/定位點布局的決策為沿y軸正向移動#4支承/定位點。
3 多支承/定位點布局優化方法
多支承/定位點布局優化方法的研究關鍵在于:找出一個合適的多點支承/定位布局P,在滿足所有約束時,使工件加工載荷下的工件加工變形最小。顯然,數學簡化多點支承/定位工裝原型、構建優化模型(包括優化目標和約束條件)與優化算法是該研究的重點。
3.1 多點支承/定位陣列工裝的數學簡化
為了便于對文獻[10]所提出的多點柔性支承/定位陣列工裝原型進行數學描述,將其簡化為圖2所示的通用模型。

圖2 多點柔性支承/定位陣列工裝簡化模型
如圖2所示,假設該系統具有滑枕的總數為m,每個滑枕具有n個支承/定位單元,則工件的任意支承/定位點布局形式可表示為
P=(P1,P2,…,Pm)
(2)
式中:Pi=(pi,1,pi,2,…,pi,n)T(i=1,2,…,m)表示第i號滑枕上n個支承/定位單元末端定位點坐標;pi,j=(pi,j_x,pi,j_y,pi,j_z)T(j=1,2,…,n)為相應支承/定位單元末端定位點的空間坐標。顯然,同一滑枕上各支承/定位點具有相同的x軸坐標。為此,以pi_x表示對應同一滑枕上的支承/定位點x坐標,那么第i號滑枕上第j號滑座上定位/支承單元末端定位點的空間坐標可表示為
pi,j=(pi_x,pi,j_y,pi,j_z)T
(3)
3.2 構建優化模型
3.2.1 構建目標函數 為描述大型薄壁件裝夾定位后抗拒加工變形的能力,構建優化目標如下
(4)
式中:kD為加工路徑各離散點處的系統工藝剛度;δm為工件加工路徑上不同位置的加工變形;Fp為加工載荷;n為加工路徑上各受力點處的法向量。
由式(4)可以判斷支承/定位點布局的優劣:若對應加工位置周圍存在足夠合理的支承/定位點布局,則該處剛度趨于無窮大,說明該加工位置已被充分支承與定位,加工變形近似為0;若該剛度很小,表明對應加工位置處變形較大,加工質量擾動大,應調整支承/定位點布局。因此,該指標反映了工件在相應加工位置處對支承/定位點布局優化的需求程度。
基于文獻[10]得到的支承/定位單元初始布局P,在保證加工區域支撐剛度和裝夾精度的前提下,調整支承/定位點分布以減少實際加工變形,進而使式(4)所給優化目標取得極大值的優化過程可表述為如下優化目標函數
max(kD)=f(P1,P2,…,Pm)
(5)
3.2.2 構建約束條件 為了避免不當支承/定位點布局所引起的支承/定位夾持機構間的幾何運動干涉,對圖2所示支承/定位夾持機構各驅動組件的運動極限進行約束如下。
(1)滑枕移動約束。第i號滑枕沿x軸的移動范圍受第i-1、i+1號滑枕所在位置限制,即
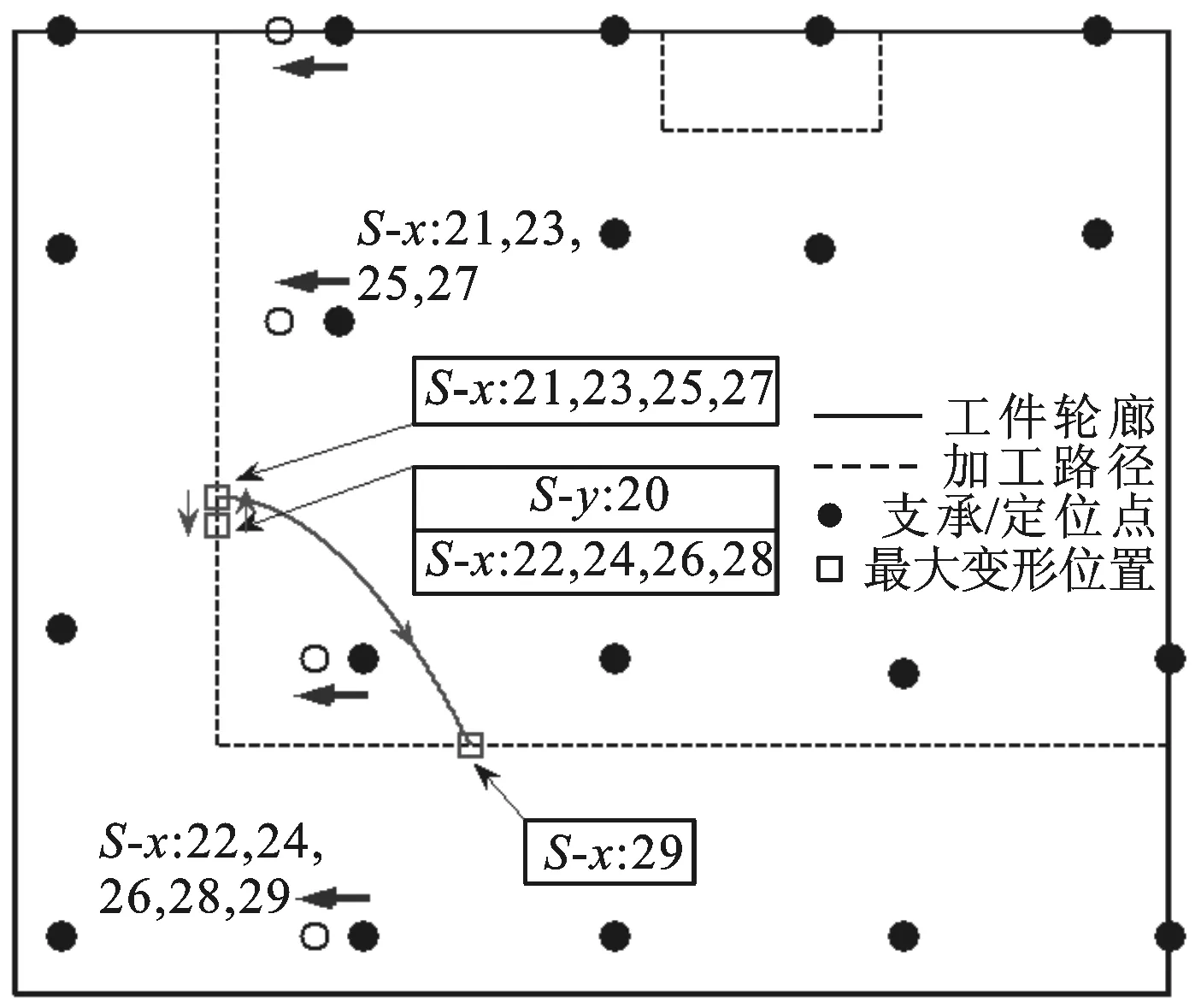
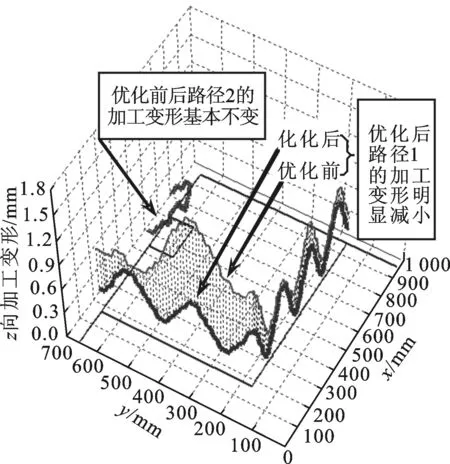
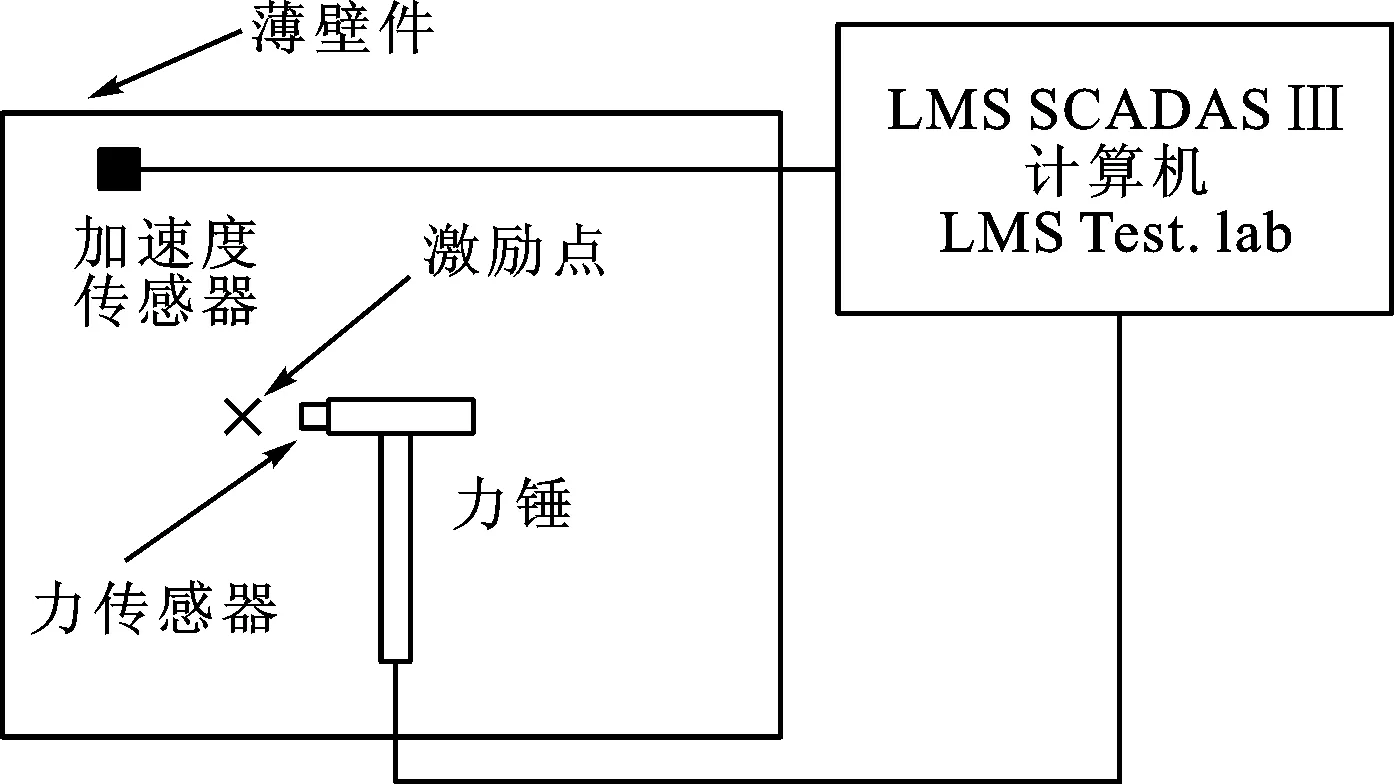
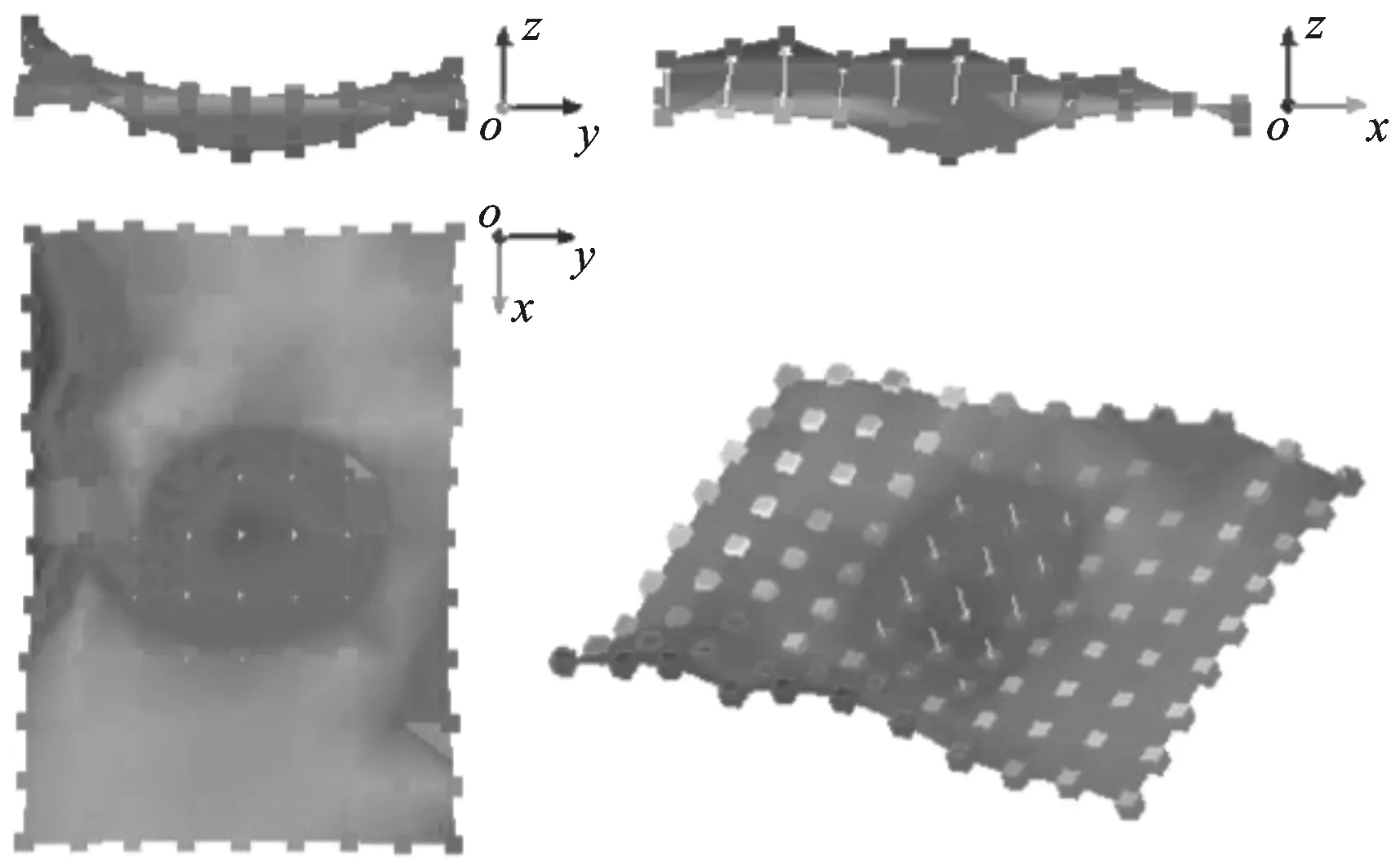
pi-1_x+umin i=2,3,…,m-1 (6) 式中:umin為相鄰滑枕接觸時相應支承/定位單元末端定位點間的最小x向間距。 最外側兩滑枕(i=1,m)的移動范圍受工裝系統基座外緣x向尺寸的限制,即 xmin (7) pm-1_x-umin (8) 式中:xmin、xmax分別為第1、第m號滑枕沿x軸正負向所能移動到的最遠處。 (2)滑座移動約束。第i號滑枕上的第j號滑座沿y軸的移動范圍受第j-1、第j+1號滑座上支承/定位單元所處位置的限制,即 pi,j-1_y+vmin i=1,2,…,m;j=2,3,…,n-1 (9) 式中:vmin為相鄰滑座接觸時相應支承/定位單元末端定位點間的最小y向間距。 最外側兩滑座(j=1,n)的移動范圍受工裝基座外緣y向尺寸的限制,即 ymin (10) pi,n-1_y-vmin (11) 式中:ymin、ymax分別為第i(i=1,2,…,m)號滑枕上第1、第n號滑座沿y軸正、負向所能移動到的最遠處。 3.3 構建優化算法 通過求解優化變量P1,P2,…,Pm,可確定支承/定位點分布,從而實現對工件加工變形及其動剛度的控制。需特別注意的是:支承/定位點的靈敏度計算通常只需考慮加工載荷附近區域,因距離較遠的支承/定位點對加工變形幾乎無任何影響,這樣可大大節省計算資源,提高優化效率。由此,該優化過程實現的具體步驟如下。 步驟1 初始化設置。設置支承/定位點初始布局P=(P1,P2,…,Pm),具體過程見文獻[10]。 步驟2 于支承/定位點布局P的工件有限元數值分析建模,求解工件的加工變形。 步驟3 求解工件加工路徑各離散加工位置處的系統工藝剛度。提取加工路徑各離散加工位置處最大變形,求解對應各離散加工位置處剛度kD,若kD>kD_max,表明該支承/定位單元分布P滿足工件加工質量需求,優化計算結束;否則,需對支承/定位點布局進行調整。 步驟5 沿x軸方向調整加工路徑上最大加工變形處周圍支承/定位點位置。利用式(1)計算各支承/定位點沿x方向移動的靈敏度Sy[f(P)],沿影響加工變形最敏感方向移動相應支承/定位點。若移動后支承/定位點滿足約束條件式(6)~式(8),則支承/定位點未觸界,重構支承/定位點布局P=(P″1,P″2,…,P″m),返回步驟2;否則,支承/定位點觸界,優化過程結束,布局P為最終優化結果。 上述多點支承/定位布局優化流程如圖3所示。 圖3 多點支承/定位布局優化流程 本節沿用文獻[10]所構建的有限元數值計算模型,并基于文獻[10]所得到的大型薄壁件多支承/定位初始布局方案,修正模型中支承/定位點的初始位置。沿工件加工路徑依次施加300 N法向加工載荷分量,利用2.1節所設計的優化策略,通過3.3節所構建的優化算法對相應支承/定位點進行調整,以此展示其逼近最大加工變形位置的整個過程。最終獲取對應加工位置的最優剛度,以此削弱加工變形,進一步驗證本文所提優化算法的正確性和合理性。 4.1 理論計算分析 4.1.1 多支承/定位點初始布局搜索 算例依據本課題組前期針對大型薄壁件多支承/定位點初始布局搜索算法的研究[10],在保證工件可靠夾持及對工件不同加工區域定位誤差有針對性重點防控的前提下,確定了工件支承/定位點的初始布局,其空間坐標如表2所示。 表2 支承/定位點空間坐標 mm 圖4 調整階段I 圖5 調整階段II 圖6 調整階段III 圖7 調整階段XII 圖8 優化前后加工路徑的加工變形對比 圖9 加工變形與工藝系統剛度變化歷程 4.1.3 工件加工路徑變形分析 工件加工路徑上各離散加工位置處的加工變形在優化前后的對比如圖8所示。由此可看出:加工路徑1的加工變形在優化后大大減小,而路徑2的加工變形基本不變。原因在于:相對加工路徑1,加工路徑2周圍的支承/定位點密度更大,最大加工變形未出現在路徑2上,優化過程未改變加工路徑2周圍的支承/定位點分布。同時,最大加工變形與工藝系統剛度的變化趨勢如圖9所示,可以發現,最大變形比優化前減小了34.5%,且大大提高了工件加工過程的剛度,保障了工件的加工質量。 4.2 模態實驗測試分析 4.2.1 模態實驗系統組成 如圖10所示,構建了模態測試系統,主要由薄壁件、多點柔性支承/定位陣列工裝、086D50型PCB力錘(208C03型力傳感器)、壓電式ICP三向加速度傳感器、LMS SCADAS III多通道數采、Test.Lab模態分析軟件和計算機組成。該測試系統主要用于獲取外界激振下薄壁件與多點柔性工裝系統在對應支承/定位點布局下的響應信號,以及完成信號的濾波、放大等功能。 圖10 模態測試系統示意框圖 4.2.2 模態實驗方法設計 采用單點激勵、多點拾取的方法對工件模型進行動態特性測試。選擇薄壁件上表面的中央位置作為激勵點,在工件模型上布置99個測點。在LMS分析軟件中,以薄壁件一個角點為原點建立坐標系,輸入所有測點的三維坐標,建立模型結構的點框圖。圖11顯示了模態實驗測試環境。 圖11 模態實驗測試環境 在建立測點點框模型之后,完成多通道動態信號采集系統的連接,測試中使用2個三向加速度傳感器獲取三維振型。對每個測量點進行5次敲擊測試,取平均值,確保每次數據采集準確可靠。在完成一組測試之后將傳感器移至下一組測量點,最終獲得整個模型99個測點的頻響函數。將頻率帶寬設置為0~200 Hz,利用LMS軟件中的Time MDOF模塊對測試結果進行分析。 4.2.3 模態參數識別、分析與系統修正 如圖12所示,提取對應本節所得到的支承/定位點布局下薄壁件的1、2階模態振型,特別顯示1階模態振型。由此可以看出:工件在寬度方向上的剛度較差,其下側邊緣較長的懸出部分產生了彎曲振動變形;工件的長度方向相對寬度方向剛度較弱,產生了彎曲振動變形,且中間無支撐區域產生了沿垂直方向的彎曲。表3對其前2階振型的特點進行了描述。 圖12 薄壁件1階模態振型 階數頻率/Hz振型描述特點140516左側邊緣、中間無支撐區域沿垂直方向彎曲垂直方向彎曲265203左下部邊緣沿寬度方向扭曲垂直方向微弱扭曲寬度方向扭曲 4.2.4 支承/定位點布局修正 鑒于本實驗室多點支承/定位系統工裝結構設計的約束,選擇整體向左移動最外側第2號滑枕上的p2,1和p2,2,以此修正支承/定位點布局。實驗結果表明,與未調整p2,1和p2,2時薄壁件固有頻率相比,其1階固有頻率由未修正時的40.516 Hz提高到修正后的43.782 Hz。圖13所示為模態振型實測結果,修正后,其變形演變為左下邊角的翹曲,且中間無支承/定位點部位振型明顯變小,較好地抑制了振動。 圖13 薄壁裝配件1階模態振型(修正后) 本文緊密結合薄壁件多點支承/定位布局優化的數學建模這一基礎理論問題,提出了多支承/定位點布局的優化策略——沿減小加工變形最敏感方向調整支承/定位點分布。在此基礎上,提出了抑制加工變形的多點定位布局優化方法。以常見的大型薄壁件的多點支承/定位為案例,并以本課題組前期研究中所提出的跟隨加工區域布置定位點的方法,對大型薄壁件的多支承/定位點初始布局進行搜索,以此作為優化初值,進而全程展示了多支承/定位點布局的優化流程。對優化后的工件加工軌跡變形計算結果進行了比對,發現最大加工變形被控制在0.669 4 mm內,相對優化前的1.022 mm減小了34.5%,由此驗證了該優化方法的正確性與合理性。此外,通過模態實驗進一步對相應支承/定位點布局下工件固有頻率以及振型等進行了測試,并以此提出了修正支承/定位點布局或添加輔助支承/定位點抑制振動變形的方法。 [1] CAI W, HU S J, YUAN J. Deformable sheet metal fixturing: principles, algorithms, and simulations [J]. J Manuf Sci Eng, 1996, 118: 318-324. [2] 胡福文, 李東升, 李小強, 等. 面向飛機蒙皮柔性夾持數控切邊的定位仿真系統及應用 [J]. 計算機集成制造系統, 2012(5): 993-998. HU Fuwen, LI Dongsheng, LI Xiaoqiang, et al. Locating simulation for aircraft skins NC trimming based on flexible holding fixture [J]. Computer Integrated Manufacturing Systems, 2012(5): 993-998. [3] 胡福文, 李東升, 李小強, 等. 蒙皮柔性夾持數控切邊的工藝設計方法 [J]. 北京航空航天大學學報, 2012, 38(5): 675-680. HU Fuwen, LI Dongsheng, LI Xiaoqiang, et al. Process planning of aircraft skins NC trimming based on reconfigurable fixture [J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(5): 675-680. [4] MENASSA R J, DEVRIES W R. Optimization methods applied to selecting support positions in fixture design [J]. Trans ASME J Eng for Ind, 1991, 113: 412-418. [5] CAI W, HU S J, YUAN J X. Deformable sheet metal fixturing: principles, algorithms and simulations [J]. Trans ASME J Manufact Science and Engng, 1996, 118: 318-324. [6] WU N H, CHAN K C. A genetic algorithm based approach to optimal fixture configuration [J]. Comput Ind Engng, 1996, 31(3/4): 919-924. [7] KULANKARA K, SATYANRAYANA S, MELKOTE S N. Iterative fixture layout and clamping force optimization using the genetic algorithm [J]. Transactions of the ASME Journal of Manufacturing Science and Engineering, 2002, 124: 119-125. [8] 秦國華, 張衛華, 周孝倫. 夾緊方案的數學建模及夾緊力的優化設計 [J]. 機械科學與技術, 2008, 24(4): 438-446. QIN Guohua, ZHANG Weihua, ZHOU Xiaolun. Modeling and optimal design of fixture clamping scheme [J]. Mechanical Science and Technology, 2008, 24(4): 438-446. [9] 陸俊百. 飛行器大型薄壁件柔性工藝裝備系統研究 [D]. 北京: 清華大學, 2010. [10]王少鋒, 洪軍, 王建國, 等. 大型薄壁件多點定位的初始布局優化算法研究 [J]. 西安交通大學學報, 2016, 50(5): 38-44. WANG Shaofeng, HONG Jun, WANG Jianguo, et al. Initial distribution optimization for multi-point location of large-scale thin-wall component [J]. Journal of Xi’an Jiaotong University, 2016, 50(5): 38-44. [本刊相關文獻鏈接] 王少鋒,洪軍,王建國,等.大型薄壁件多點定位的初始布局優化算法研究[J].2016,50(5):38-44.[doi:10.7652/xjtuxb 201605006] 吳繼琸,朱剛賢,陸斌,等.自愈合效應對光內送粉激光變斑熔覆成形薄壁件的影響[J].2016,50(1):145-150.[doi:10.7652/xjtuxb201601022] 周強,劉志剛,洪軍,等.卡爾曼濾波在精密機床裝配過程誤差狀態估計中的應用[J].2015,49(12):97-103.[doi:10.7652/xjtuxb201512016] 王少鋒,張進華,劉志剛,等.大型飛機機身壁板裝配位姿調整系統的運動規劃[J].2011,45(3):102-106.[doi:10.7652/xjtuxb201103019] 丁建軍,蔣莊德,李兵,等.線結構光掃描測頭誤差分析與補償方法[J].2008,42(3):286-290.[doi:10.7652/xjtuxb2008 03007] (編輯 杜秀杰) Multi-Point Location Method of Large-Scale Thin-Wall Component WANG Shaofeng1,2,HONG Jun2,WANG Jianguo1,LI Baotong2,YANG Zhaohui3 (1. School of Mechanical Engineering, Inner Mongolia University of Science and Technology, Baotou, Inner Mongolia 014010,China; 2. State Key Laboratory for Manufacturing Systems Engineering, Xi’an Jiaotong University, Xi’an 710049, China;3. School of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, China) To analyze the relationship between workpiece machining deformation and multi-point location/support distribution, a new optimization method is proposed to amend multi-point location/support distribution. Depending on the idea of representing the sensitivities of machining deformation with finite difference method, the analytic expressions for sensitivities of machining deformation with respect to location/support distribution are established. The location/support distribution is adjusted along the most sensitive direction to restrain machining deformation and improve process system stiffness. A multi-point location of large-scale thin-wall component is taken as an example, and the searched initial distribution of location/support point is regarded as the initial value for the global optimization of multi-point location/support distribution. A comparison with non-optimized workpiece machining path deformation shows the maximum machining deformation is reduced by 34.5%, which is limited below 0.669 4 mm far less than the non-optimized value of 1.022 mm. thin-wall component; multi-point location; distribution optimization 2015-12-16。 作者簡介:王少鋒(1980—),男,講師;洪軍(通信作者),男,教授,博士生導師。 基金項目:國家自然科學基金青年基金資助項目(51405377)。 時間:2016-03-11 10.7652/xjtuxb201606019 TH161 A 0253-987X(2016)06-0122-08 網絡出版地址:http:∥www.cnki.net/kcms/detail/61.1069.T.20160311.1711.002.html

4 算例研究










5 結 論
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14建材發展導向(2021年12期)2021-07-22 08:06:48建材發展導向(2021年7期)2021-07-16 07:07:52中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48中華詩詞(2020年1期)2020-09-21 09:24:52小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00數學大王·中高年級(2016年12期)2016-12-26 21:37:36湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07上海電機學院學報(2015年4期)2015-02-28 14:30:00