SINS/GPS組合導航系統的研究
2016-12-23 02:59:14朱龍永趙艷霞
制造業自動化 2016年7期
關鍵詞:系統
王 玲,劉 義,朱龍永,趙艷霞
(沈陽理工大學 自動化與電氣工程學院,沈陽 110159)
SINS/GPS組合導航系統的研究
王 玲,劉 義,朱龍永,趙艷霞
(沈陽理工大學 自動化與電氣工程學院,沈陽 110159)
為了應對導航系統小型化、高精度的要求,提出了基于DSP的捷聯慣性導航系統(SINS)/全球定位系統(GPS)組合導航系統。介紹了系統的基本原理、系統的硬件設計,采用無跡卡爾曼濾波(UKF)算法完成了信息融合,對導航樣機進行試驗。實驗結果表明,該組合導航系統降低了成本、提高了精度、具有較高的穩定性。
DSP;SINS/GPS;低成本;UKF;組合導航
0 引言
隨著現代科學技術的不斷發展,人們對動態載體運動目標(導彈、飛機、衛星、坦克、車輛、艦船等)的跟蹤精度和可靠性要求越來越高,多傳感器的組合導航在實際需要的導航與跟蹤及控制上比單一傳感器的性能方面優越的多,其應用領域更廣泛。捷聯慣性導航系統具有結構簡單、體積小、可靠性較好、重量輕、成本低、易于維修等特點,發展迅速,而且在一些武器中得到了實際的應用[1,2]。20世紀80年代末期,我國開始MEMS慣性器件研制,經過20多年的發展,在理論研究、原理樣機開發等方面取得了一定的成果,初步具備工業生產的能力,但與工業發達國家相比在微型化、高精度、可靠性等各方面有很大差距[3]。由于MIMU的精度不是很高,其定位的誤差是隨著時間而變化的,因此單個的MIMU導航系統難以完成高精度、長時間的導航任務[2]。MIMU的缺點是自主性差,抗干擾能力弱,接收機的數據更新時間長,難以滿足導航系統的實時性。全球定位系統(GPS)是高精度實時衛星導航系統,定位的誤差與時間無關。MIMU和GPS兩者構成的組合導航系統的優點是克服了兩者單獨工作時的缺點,兩者相互取長補短,能夠完成較高精度、長時間的導航任務。
基于此,本文提出了一種易于工程實現的SINS/GPS組合導航系統結構,并設計出了該組合導航的樣機,最后對樣機進行的實驗來驗證該組合導航系統的實用性。
1 系統的基本原理
該組合導航系統分為以下三個部分:GPS、SINS和無跡卡爾曼濾波器(UKF)[4]。組合導航原理框圖如圖1所示。
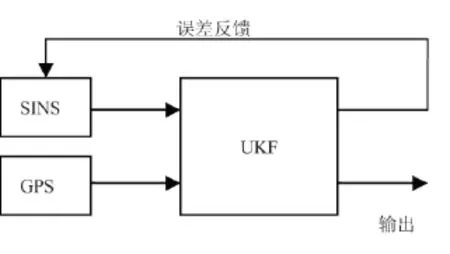
圖1 組合導航原理框圖
2 系統硬件設計
SINS/GPS組合導航系統原理樣機的硬件結構和實物圖如圖2、圖3所示,包括以下五個部分:串口、MIMU、GPS接收機、AD轉換模塊和導航計算機[5]。

圖2 系統的硬件結構

圖3 硬件實物圖
由于TMS320C6713BGDP內部沒有異步串口,本文利用DSP多通道緩沖串行接口(McBSP)和全功能異步收發器(MAX3111)實現了由同步串口到異步串口的轉換。硬件電路圖如圖4所示。

圖4 McBSP與MAX3111的硬件電路圖
MIMU采用ADI公司的單軸微慣性測量單元陀螺(ADXR620)和加速度(AD22279),其精度可以滿足低速飛行器的要求。GPS接收機選用的是B1/B3/GPS/ GLONASS三模四頻衛星導航接收模塊;AD7606采用ANALOG DEVICES公司的產品,它的功能是16位、8個通道的同步采樣模擬信號轉換為數字信號的數據采集系統。硬件的尺寸直徑80mm,高度為30mm,體現了系統的小型化。
3 UKF濾波算法
3.1UKF算法流程
若離散的非線性系統如下所示:
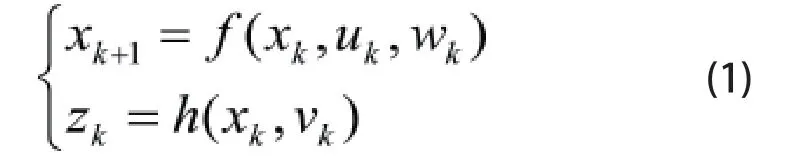
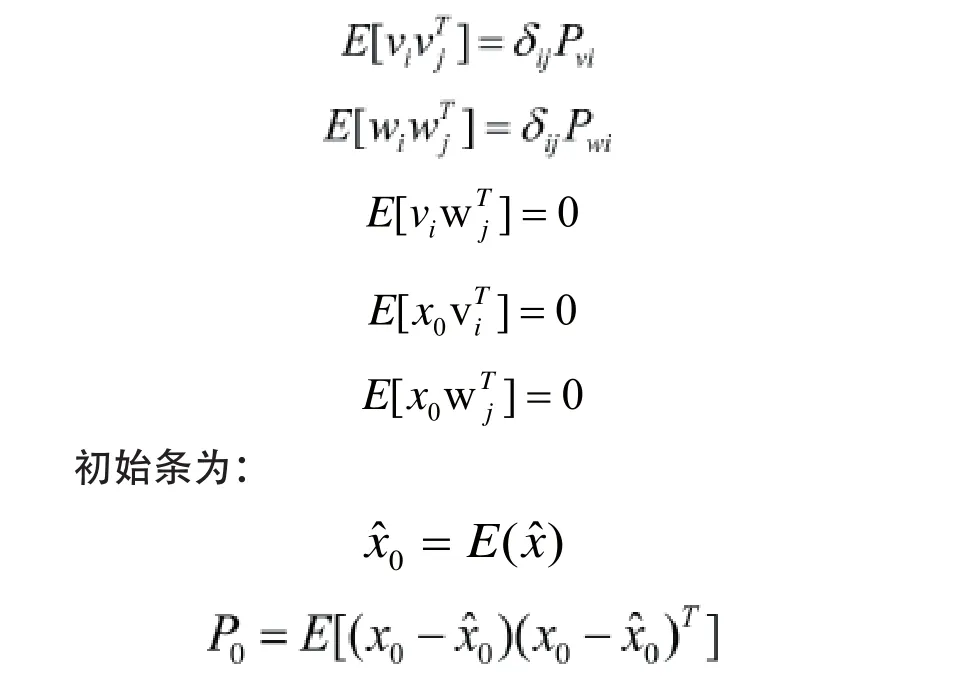
式中:xk為k時刻的狀態向量,wk為狀態噪聲,uk為系統控制量,zk為觀測向量,vk為觀測噪聲,它們的維數分別為n、q、p、m。假設噪聲v和w都是均值為零的白噪聲。且滿足:
其濾波的具體步驟為,通過蒙特卡洛模擬法對σ進行采樣,得到k時刻狀態估計的σ點集合{kki/,χ},并賦予對應的采樣點的權值。
3.2預測方程
狀態量的一步預測:

狀態量的一步預測誤差:

觀測量的一步預測:

觀測量的一步預測誤差:

3.3更新方程
濾波增益矩陣:

濾波估計值:

濾波誤差方差矩陣:

UKF是一定范圍內的具有權重的點構成的集合,這些點在帶入到非線性系統方程中就能夠得到另外一群點的集合,后的到的這些點的集合用來反映下一時刻系統狀態的預測值,其在傳遞函數關系上為非線性的數學模型,而實際處理的為一一對應的線性化,不再考慮面對一個具體系統模型的傳遞函數的具體表達式。算法不依賴于其他條件,應用范圍廣泛。利用此算法可以很好地完成對組合導航信息的融合。
4 實驗仿真及結果
將樣機進行車載試驗,跑車線路如圖5所示。

圖5 跑車線路圖
將收集到的數據同過MATLAB來仿真,得到位置曲線如圖6所示。

圖6 位置曲線
圖7、圖8是整個車載實驗過程中解算出來的SINS/ GPS組合導航系統測量運載體的姿態和誤差曲線。
通過車載試驗證明了該樣機具有較高的精度和穩定性。
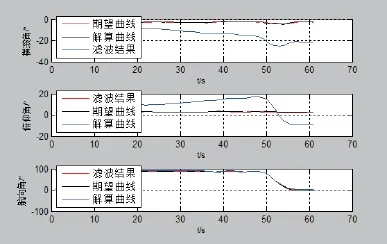
圖7 姿態曲線

圖8 誤差曲線
5 結論
通過試驗,驗證了SINS/GPS組合導航系統的可行性及UKF算法的正確性。本系統結構簡單,對導航信息能夠實時處理,能夠提供穩定、高質量的導航信息,具有一定的應用價值。
[1] 李傳軍,彭鐘鋒,李興城.慣性導航系統自適應輔助GNSS矢量跟蹤方法[J].探測與控制學報,2014,05:74-79.
[2] 袁克非.組合導航系統多源信息融合關鍵技術研究[D].哈爾濱工程大學,2012.
[3] 王菲.SINS/GPS組合導航系統研究[D].北京:北京理工大學,2015.
[4] 秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導航系統[M].西安:西北工業大學出版社,1998:44-56.
[5] 劉向宇.DSP嵌入式常用模塊與綜合系統設計實例精講[M].北京:電子工業出版社,2009:63-90.
Research on SINS/GPS integrated navigation system
WANG Ling, LIU Yi, ZHU Long-yong, ZHAO Yan-xia
V249.3
A
1009-0134(2016)07-0093-03
2016-03-28
王玲(1960 -),男,教授,研究方向為嵌入式計算機應用及非線性控制系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32