文化主題園區(qū)創(chuàng)意展示系統(tǒng)虛擬體驗動感平臺的結(jié)構(gòu)設計與仿真
2016-12-23 02:59:06熊禾根楊洪濤
制造業(yè)自動化 2016年7期
陶 永,高 彭,熊禾根,胡 磊,楊洪濤
(北京航空航天大學,北京 100091)
文化主題園區(qū)創(chuàng)意展示系統(tǒng)虛擬體驗動感平臺的結(jié)構(gòu)設計與仿真
陶 永,高 彭,熊禾根,胡 磊,楊洪濤
(北京航空航天大學,北京 100091)
針對文化主題園區(qū)創(chuàng)意展示系統(tǒng)的虛擬體驗和虛擬環(huán)境需求,設計了一種由Stewart平臺演變而來的6自由度虛擬體驗動感平臺,在其簡化后的并聯(lián)機構(gòu)平臺基礎上,添加顯示與操作裝置,進而通過ADAMS軟件對該動感平臺中心點進行了關鍵參數(shù)設置與運動仿真,實現(xiàn)了該虛擬體驗動感平臺在不同場景下的運動軌跡優(yōu)化,為其位置控制、速度控制奠定了基礎,驗證了該平臺結(jié)構(gòu)設計和運動控制的有效性。
動感平臺;并聯(lián)機構(gòu);ADAMS;運動軌跡
0 引言
隨著人類需求與技術的發(fā)展,虛擬體驗技術逐漸變成熱門,其可以使體驗者在安全環(huán)境下體驗更真實刺激的環(huán)境感受。而在虛擬體驗裝置的研究中,對于串并聯(lián)等運動機構(gòu)的學習更是越來越廣泛。
本文針對某文化主題園區(qū)創(chuàng)意展示系統(tǒng)的虛擬體驗和虛擬環(huán)境需求,研究設計了一種基于并聯(lián)機構(gòu)的虛擬體驗裝置-動感平臺。在動感平臺的相關研究中,其有二自由度、三自由度和六自由度。其中,二自由度和三自由度,其位姿變化較少,在空間上受到一定限制,而六自由度動感平臺,基于Stewart平臺,可以實現(xiàn)運動機構(gòu)的上下、左右、前后的位置變化。
在驅(qū)動形式上多為傳統(tǒng)液壓驅(qū)動,其液壓系統(tǒng)造價高,且對環(huán)境易產(chǎn)生污染,且其運動機構(gòu)上下平臺連接處采用胡克鉸,會導致一定的運動不平穩(wěn)等。在此基礎上,根據(jù)并聯(lián)結(jié)構(gòu)的特點,設計一種新型結(jié)構(gòu)的虛擬體驗動感平臺,并進行運動仿真。
1 動感平臺的總體方案
本文提出的六自由度并聯(lián)機構(gòu)動感平臺虛擬體驗裝置,其總體結(jié)構(gòu)如圖1所示:由顯示裝置、操作裝置、移動平臺(上平臺)、執(zhí)行機構(gòu)(驅(qū)動桿)、固定平臺、控制系統(tǒng)六部分組成。其中,通電模擬軟件運行后,經(jīng)過顯示裝置將虛擬體驗模擬畫面顯示出來,體驗者位于上平臺,體驗者根據(jù)不同虛擬場景(如汽車或過山車等場景)做出不同的控制動作,并通過對位于上平臺上的操作裝置進行操控。驅(qū)動桿會根據(jù)不同場景來改變其伸長的長度、速度、加速度等來改變上平臺位姿,使虛擬體驗達到更好的效果。
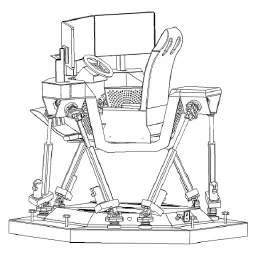
圖1 動感平臺并聯(lián)機構(gòu)整體設計
移動平臺結(jié)構(gòu)如圖2所示,動感平臺簡化為Stewart并聯(lián)機構(gòu)平臺后如圖3所示,由上下平臺和驅(qū)動桿組成。為了增強體驗者的模擬感受及機構(gòu)可靠性,設置上平臺為如圖2所示的結(jié)構(gòu),上平臺中間下凹,保證運動空間的前提下,有效的降低了上平臺重心,可以有效的降低位于體驗裝置上體驗者的重心。

圖2 并聯(lián)機構(gòu)上平臺
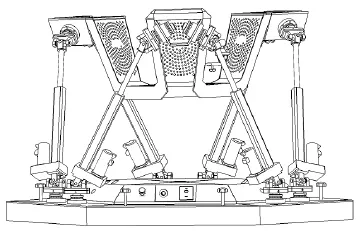
圖3 動感平臺總體方案
移動平臺和固定平臺由電動伸縮缸連接,在連接處由兩個虎克鉸,和轉(zhuǎn)動關節(jié)分別與移動平臺和固定平臺連接,其連接裝置如圖4所示。驅(qū)動桿(電動伺服缸)與移動平臺的連接由萬向鉸和由兩個深溝球軸承和兩個止推軸承、軸、軸套組成,形成球鉸,保證了運動的靈活性。其關節(jié)剖視圖如圖5所示。

圖4 轉(zhuǎn)動關節(jié)

圖5 轉(zhuǎn)動關節(jié)剖視圖
2 動感平臺的控制系統(tǒng)
對于并聯(lián)機構(gòu)控制系統(tǒng)的設計,采用電動缸的方式,采用伺服電動缸驅(qū)動上平臺運動,可以提高動感平臺的運動精度。單個伺服電動缸,如圖6所示,其中伺服電動缸是將伺服電機與絲杠一體化設計的模塊化產(chǎn)品,將伺服電機的旋轉(zhuǎn)運動轉(zhuǎn)換成直線運動,同時將伺服電機最佳優(yōu)點-精確轉(zhuǎn)速控制,精確轉(zhuǎn)數(shù)控制,精確扭矩控制轉(zhuǎn)變成-精確速度控制,精確位置控制等,且可以提供非常靈活的安裝配置。
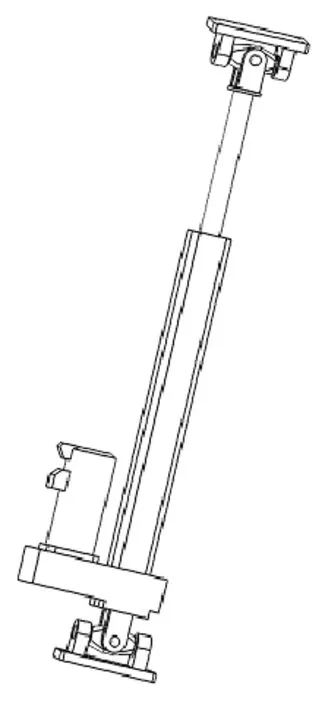
圖6 單個伺服電動缸
對于動感平臺自由度及機構(gòu)逆解的計算:
由自由度計算公式:

在式(1)中,q為機構(gòu)中每個構(gòu)件的全部自由度個數(shù),在空間機構(gòu)中q等于6。n為機構(gòu)構(gòu)件數(shù);Ni表示自由度為i的運動副的個數(shù)。在所設計虛擬體驗裝置動感平臺中,根據(jù)公式,計算可得:F=6。
對于動感平臺的運動逆解的計算,因為本動感平臺是基于Stewart平臺的機構(gòu)模型,其中,Stewart平臺一般是由負載平臺和固定平臺與鉸副連接六個伸縮桿移動副構(gòu)成。首先建立模型的坐標系,其運動逆解是已知移動平臺的位姿即三個線性坐標參量(x,y,z)和三個旋轉(zhuǎn)坐標參量求解平臺六個電動缸的長度q。
如圖6所示,在移動平臺和固定平臺上選擇OA和OB作為參考點,然后以這兩個參考點分別建立笛卡爾坐標系{A}和{B},移動平臺坐標系A的原點設為P,P點在固定平臺B中的坐標向量為P=[xp,yp,zp]T,所以,移動平臺的位姿用橫滾,俯仰,偏轉(zhuǎn)歐拉角表示為。移動平臺坐標系A相對于固定平臺坐標系B的旋轉(zhuǎn)矩陣為:

對于動感平臺設計中,移動平臺和固定平臺之間的驅(qū)動電動缸來說,作為驅(qū)動伸縮桿,對其建立一個閉環(huán)向量表達式如下:

其中,i=1,2,…,6。
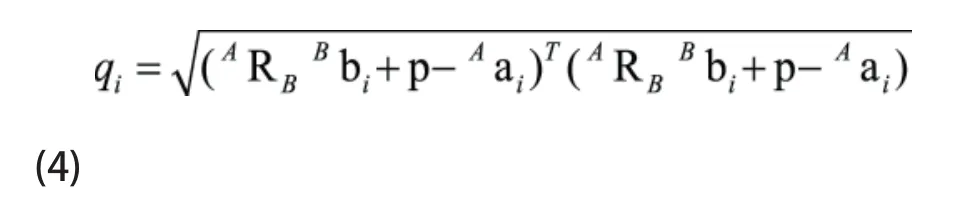
其中,i=1,2,…,6。
在公式中Bbi,Aai為已知量,所以根據(jù)相應參數(shù)可求得驅(qū)動伸縮桿即電動缸的長度,從而求得基于Stewart動感平臺的運動學反解。

圖7 動感平臺原理圖
3 仿真實驗驗證
通過對以上虛擬體驗裝置動感平臺的簡化,可得到其簡化模型為Stewart平臺,進而對Stewart并聯(lián)結(jié)構(gòu)平臺進行模擬仿真。將模型簡圖,如圖8所示,導入ADAMS中,設置上平臺中心點為原點。

圖8 動感體驗平臺的ADAMS模型簡圖
在虛擬體驗裝置動感平臺中,為了更真實的體驗模擬環(huán)境,我們可設置平臺的運動曲線,并在ADAMS軟件中進行仿真,在平臺的中心點處設置marker點,在空間中,其可以有x,y,z三個方向的平移運動,和分別繞x,y,z方向的轉(zhuǎn)動,在marker點處設置motion。
場景一:為其添加運動方程使平臺以正弦或者余弦的形式,(如:ABS(440×sin(2×pi×time)))上下運動,可以得到其中心marker點運動曲線,在仿真運動所設置的時間5s內(nèi),其沿z軸運動的位置,速度,加速度路線圖如圖9所示,以及其中的電動伺服缸驅(qū)動桿質(zhì)心處分別在x,y,z方向上以及其矢量和的運動曲線如圖10所示。

圖9 上平臺中心點沿z軸運動圖
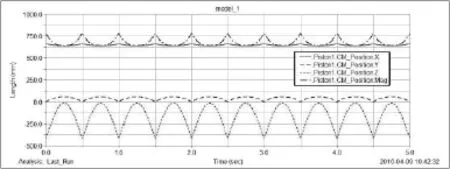
圖10 電動伺服缸驅(qū)動桿質(zhì)心位置變化
場景二:當上平臺以正弦函數(shù)運動形式:sin(2×pi×time)進行繞x軸的轉(zhuǎn)擺時,可在ADAMS仿真里得到各個電動伺服缸驅(qū)動桿質(zhì)心點的運動軌跡在坐標系下的矢量和,如圖11所示。
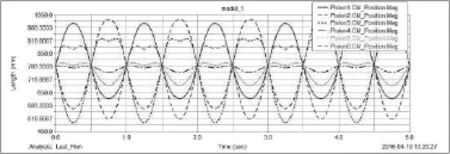
圖11 電動伺服缸各驅(qū)動桿質(zhì)心位置變化
場景三:進行兩個方向運動的融合,即上平臺以運動方程ABS( 440×sin(2×pi×time))的形式沿marker點的z軸向上運動,與此同時使上平臺以運動方程sin(2×pi×time)的形式繞x軸轉(zhuǎn)動,可以得到六個驅(qū)動桿的位移曲線如下圖所示:其中圖12為電動伺服缸驅(qū)動桿1,2的質(zhì)心運動曲線矢量圖,圖13為電動伺服缸驅(qū)動桿3,4的質(zhì)心運動曲線矢量圖,圖14為電動伺服缸驅(qū)動桿5,6的質(zhì)心運動曲線矢量圖。
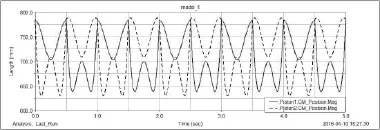
圖12 電動伺服缸驅(qū)動桿1,2的質(zhì)心運動曲線
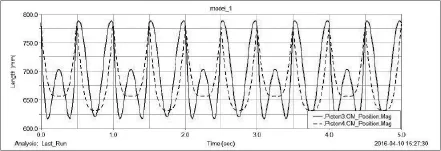
圖13 電動伺服缸驅(qū)動桿3,4的質(zhì)心運動曲線
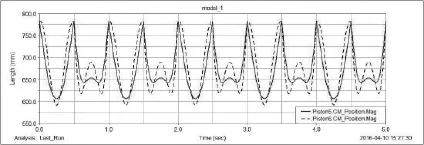
圖14 電動伺服缸驅(qū)動桿5,6的質(zhì)心運動曲線
4 結(jié)論
通過ADAMS/PostProcesser功能模塊,得到動感平臺的運動規(guī)律,從而對輸出數(shù)據(jù)結(jié)果進行統(tǒng)計分析,以及結(jié)合對動感平臺運動反解的求取,從而對動感平臺在不同場景下的運動模式進行更精確的控制,以便達到更真實的虛擬體驗效果。
[1] 楊建新,汪勁松,郁鼎文,等.空間并聯(lián)機構(gòu)運動學與動力學逆解的模塊化計算方法[J].機械工程學報,2005,41(5):104-107.
[2] 彭凱,王建平,李曉峰,等.6自由度3-PRPS并聯(lián)機器人運動規(guī)劃分析及仿真[J].機械研究與應用,2010,(5):25-28,33.
[3] 靳業(yè)奇,鄭海彤.空間機構(gòu)自由度計算公式的研究[J].科技資訊,2013,(4):133.
[4] 謝國慶,郭欣欣.Stewart平臺運動學仿真分析[J].流體傳動與控制,2014,(6):19-21.
[5] 郭衛(wèi)東.虛擬樣機技術與ADAMS應用實例教程[M].北京:北京航空航天大學出版社,2008.
[6] I. Davliakos and E. Papadopoulos.Model-based position tracking control for a 6-dof electrohydraulic Stewart platform[C].Control & Automation,2007.MED‘07. Mediterranean Conference on,Athens,2007:1-6.
[7] H. Hajimirzaalian, H.Moosavi and M. Massah.Dynamics analysis and simulation of parallel robot Stewart platform[J].
The structure design and simulation of the virtual experience dynamic platform for the creative display system of the cultural theme park
TAO Yong, GAO Peng, XIONG He-gen, HU Lei, YANG Hong-tao
TP241.3
A
1009-0134(2016)07-0030-04
2016-04-29
國家科技支撐計劃課題:大型文化主題園區(qū)創(chuàng)意展示系統(tǒng)技術集成與應用示范(2013BAH45F00)
陶永(1979 -),男,河北新樂人,工學博士,研究方向為工業(yè)機器人柔性機械臂技術、嵌入式機電控制技術與飛機柔性裝配制造技術。