空間對接機構技術綜述
2016-12-21 08:37:06張崇峰
上海航天 2016年5期
張崇峰,劉 志
(1.上海航天技術研究院,上海 201109; 2.上海宇航系統工程研究所,上海 201109)
?
空間對接機構技術綜述
張崇峰1,劉 志2
(1.上海航天技術研究院,上海 201109; 2.上海宇航系統工程研究所,上海 201109)
對空間對接機構及其技術進行了綜述。將空間對接機構分為載人大型對接機構和非密封小型對接機構兩大類,闡述了空間對接機構的物資補給與人員輪換、大型航天器或平臺在軌裝配、航天器在軌服務,以及探測器飛行過程構型優化等主要用途。將空間對接技術劃為早期探索、實用、發展成熟和深入發展4個階段。歸納了主要空間對接機構的特點。分析了空間對接技術中的總體設計、關鍵部件研制、對接力學仿真、對接機構試驗等難點。回顧了我國空間對接技術的發展歷程,以及突破的總體技術方案、捕獲與緩沖設計、連接設計,以及其它設計要素等關鍵技術。給出了我國空間對接機構應用取得的重大成就。介紹了國外載人弱撞擊式對接機構、停靠性對接機構和衛星對接機構等新型空間對接機構的研究背景、進展和涉及的關鍵技術。提出了未來我國空間對接技術發展路線,建議開展弱撞擊對接系統、衛星對接機構的研究,并將合作目標對接技術向非合作目標捕獲方向拓展。
空間對接; 空間對接機構; 捕獲; 緩沖; 異體同構對接機構; 周邊式對接機構; 弱撞式對接機構; 通用停靠機構; 衛星對接機構
0 引言
空間對接使兩個航天器在空間軌道上結合,并在結構上連接成一個整體。空間對接技術的作用主要體現在三個方面:一是為長期運行的空間設施提供服務,包括物資補給、設備回收、燃料加注和人員輪換;二是大型空間建筑的在軌建造和運行服務,如組裝空間站等;三是航天器在軌重構,實現系統優化以降低對運載能力的要求[1]。航天器對接機構作為復雜也是關鍵的空間機構,一直是航天技術發展的重要標志,是各航天大國爭相發展的核心技術。空間對接需解決航天器的捕獲,緩沖碰撞能量,避免發生硬碰撞,減少對接的沖擊力,形成航天器間的剛性連接以及安全分離。空間對接機構涉及動力學、機構、控制等多個方面,同時要適應復雜空間環境的苛刻要求,導致對該項技術的掌握困難重重,目前僅有美、俄完全掌握了該項技術,歐空局和日本等則通過國際合作完成空間對接。2011~2013年,中國的神舟八號、九號、十號3艘飛船與天宮一號目標飛行器完成了3次空間對接任務,是中國在航天器空間對接技術領域中取得的重要成就,也為今后建造和運營空間站打下了良好的基礎,為實現更深遠的太空探索邁出了堅實的一步。本文對空間對接機構技術進行了綜述。
1 空間對接機構簡介
1.1 空間對接機構用途與分類
空間對接機構是實現空間飛行器間在軌的機械連接,建立航天器聯合飛行的組合體和安全分離的系統。空間對接機構的任務是在對接初始條件范圍內,實現兩航天器的對接、保持對接和分離。空間對接是現代復雜航天器長期在軌運行期間不可缺少的操作,是載人航天活動必須掌握的一項基本技術。
根據載人與否,空間對接機構可分為兩大類:載人大型對接機構和非密封小型對接機構。其中:載人大型對接機構主要實現大型航天器對接,并建立密封通道,用于人員和貨物的通行;非密封小型對接機構一般多用于衛星在軌服務、在軌捕獲等領域。空間對接機構分類如圖1所示。
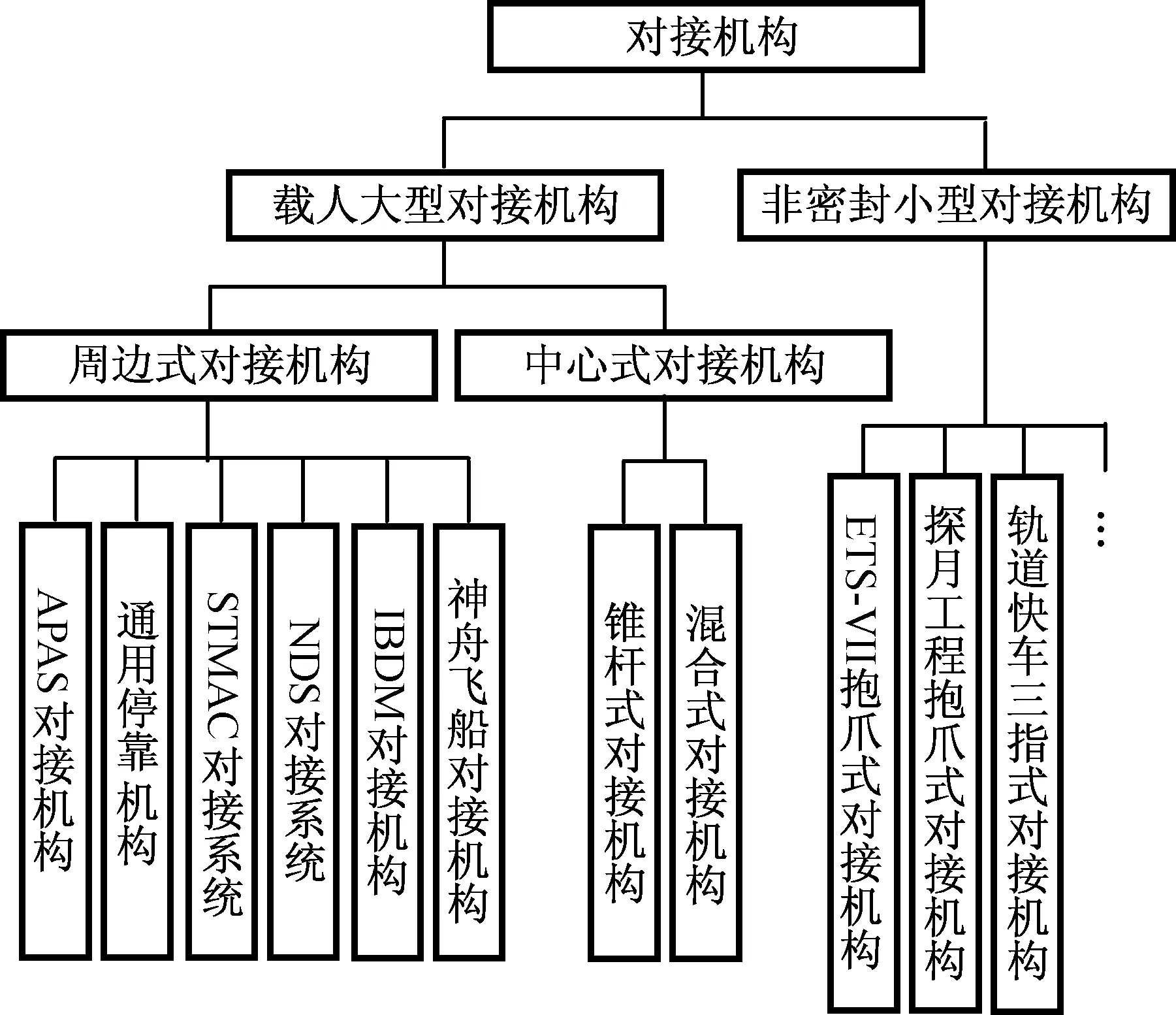
圖1 空間對接機構分類Fig.1 Space docking mechanism
空間對接機構的用途可歸納為以下4個方面[2]。
a)物資補給與人員輪換
通過交會對接,為長期運行的載人空間站提供物資補給和人員運輸服務,這是空間交會對接最主要和最頻繁的任務應用,也是空間站建造和持續運行的基礎。通過載人飛船、貨運飛船和航天飛機與空間站的交會對接,可完成對空間站的給養補充、人員輪換、設備維修、部件更換、燃料加注,以及應急救援等任務。如歐空局自動轉移飛行器(ATV),日本希望號轉移飛行器(HTV)以及龍飛船與國際空間站的對接等。
b)大型航天器或平臺在軌裝配
大型航天器或平臺包括大型空間站和大型深空探測器等。因結構復雜,尺寸大,其重量已超過目前的運載火箭能提供的運載能力,采用一次發射的方式已不能滿足大型航天器入軌的任務需求。通過空間交會對接技術進行在軌裝配,能將多次發射的航天器連接裝配為一個整體,并可持續擴展或進行構型重組和構型優化,實現大型軌道復合體,如國際空間站(ISS)和我國空間站的建造。
c)航天器在軌服務
通過空間交會對接,可對航天器進行在軌監測、燃料補加、部件替換維修和載荷升級等操作,有效地延長航天器在軌壽命,提高工作性能,降低任務綜合成本。如2007年,美國軌道快車(OE)項目開展了自動交會對接技術支持下的在軌服務試驗,用SRC研究公司研制的軌道快車捕獲系統(OECS)成功進行了電源等在軌可更換單元(ORU)的在軌更換[3]。
d)探測器飛行過程構型優化
利用空間交會對接技術可進行載人登月和深空探測任務中的航天器在軌組建及構型優化,最終實現系統優化并保證任務的可行性。通過多次發射和交會對接技術,在地球、行星、月球軌道上或拉格朗日點完成航天器的組裝,可降低對單發運載火箭能力的需求,特別是對如火星以及更遠的載人登陸任務來說,這是在目前技術水平上保證工程可實現的最佳甚至是唯一途徑[4]。
1.2 空間對接技術發展歷程
空間對接技術起步于20世紀60年代。根據空間對接技術發展和應用情況,大致可分為4個階段。
a)早期探索階段
美國和前蘇聯關于空間對接技術的研究與探索起步于20世紀60年代初期。1966年3月美國雙子星座載人飛船與阿金納火箭艙體,在航天員的參與下完成了人類歷史上首次空間對接作業。1967年10月30日,前蘇聯宇宙-188和宇宙-186飛行器首次實現了無人對接。早期的空間對接機構的對接成功率不高,機構較簡單,不能實現兩航天器內部通道的連通。但早期的探索工作為后續的發展積累了大量經驗[5]。
b)實用階段
20世紀60年代末至70年代中期,是空間對接機構技術在載人航天活動中的實用階段。該階段以美國阿波羅登月計劃的栓-錐式對接機構、聯盟-禮炮號飛船的錐桿式對接機構和APAS-75周邊式對接機構的成功應用為代表[5]。
APAS-75對接機構采用異體同構構型,具有自然的過渡通道,它的出現是航天器空間對接技術的一個重大進步。美國和前蘇聯兩國在阿波羅-聯盟計劃中分別研制了APAS-75對接機構,雖然傳動工作原理各異,但具有通用的接口。
c)發展成熟階段
20世紀70年代末至90年代是空間對接技術逐漸發展成熟的階段。在該階段,空間對接機構產品大量用于載人航天活動,形成了APAS-89對接機構、聯盟錐桿式對接機構、混合式對接機構和通用停靠機構(CBM)等產品系列[6]。
為適應大型航天器(航天飛機、空間站等)對接,該階段出現了兩個發展方向。一是繼承已有的技術基礎,改進和提高機構的性能與功能,如APAS-89對接機構等;另一是利用先進導航控制和空間機械臂技術,降低對接機構的研制難度,出現了空間停靠機構,如CBM、空間站有效載荷對接機構等。這兩個方向成為目前應用最廣的空間對接機構技術。
d)深入發展階段
20世紀90年代末至今,隨著新技術的運用,新型空間對接技術獲得了發展。在總結已有的空間對接機構的研制、飛行經驗與教訓基礎上,美國和歐洲提出并開發了載人弱撞擊對接機構,但目前還未進行飛行試驗。新型空間對接機構具弱撞擊對接、較好的任務適應性和兼容國際標準對接接口等特征,同時融合了現代的先進自動控制技術,是未來空間對接機構的發展方向之一[7]。
空間對接技術的應用范疇逐漸拓展,空間對接機構的任務類型越來越多樣化,為適應衛星在軌維護和空間安全等任務需求,出現了質量小、體積小、功能簡單的輕小型空間對接機構和捕獲機構,一方面用于衛星在軌服務領域,如美國軌道快車對接機構、日本ETS-VII接機構等,另一方面用于空間非合作目標抓捕,如故障衛星維修和空間碎片捕獲等,是空間對接技術應用拓展出現的方向之一。
迄今為止,全世界共進行了近400次空間對接活動。主要空間對接機構的特點見表1[2]。
1.3 空間對接研制技術難點
空間對接機構涉及動力學、機構、控制等多個學科,同時要適應復雜空間環境的苛刻要求,滿足高可靠工程要求,為此需解決多個技術難題。以載人周邊式對接機構為例,其主要技術難點如下[8]。
a)空間對接機構總體設計
空間對接機構是集機、電、熱、控制等多學科為一體的復雜空間機構產品。由于對接過程是碰撞和機構運動的復合過程,設計中必須綜合考慮并攻克對接機構的力學參數、結構布局等總體參數設計,保證對接動力學和機構動力學的要求。同時,在滿足對接要求的前提下,還必須考慮高低溫、熱真空等空間環境、加工精度等因素對空間對接機構的精度設計、分配和保證的影響。
b)關鍵部件研制
空間對接機構包括大量的部件,具體有捕獲鎖、對接鎖、摩擦制動器、電磁阻尼器和電路浮動斷接器等,這些部件在不同工作過程中的功能各異,性能要求甚至相互矛盾。如摩擦制動器,在對接環推出時要求其打滑力矩較大,以保證有足夠的能力驅動傳動鏈的阻力,而在緩沖時則需要其打滑力矩較小,以保證對接環有更好的適應能力。因此,必須通過合理設計和充分試驗驗證,保證產品在不同過程的性能,保證空間對接機構工作可靠。
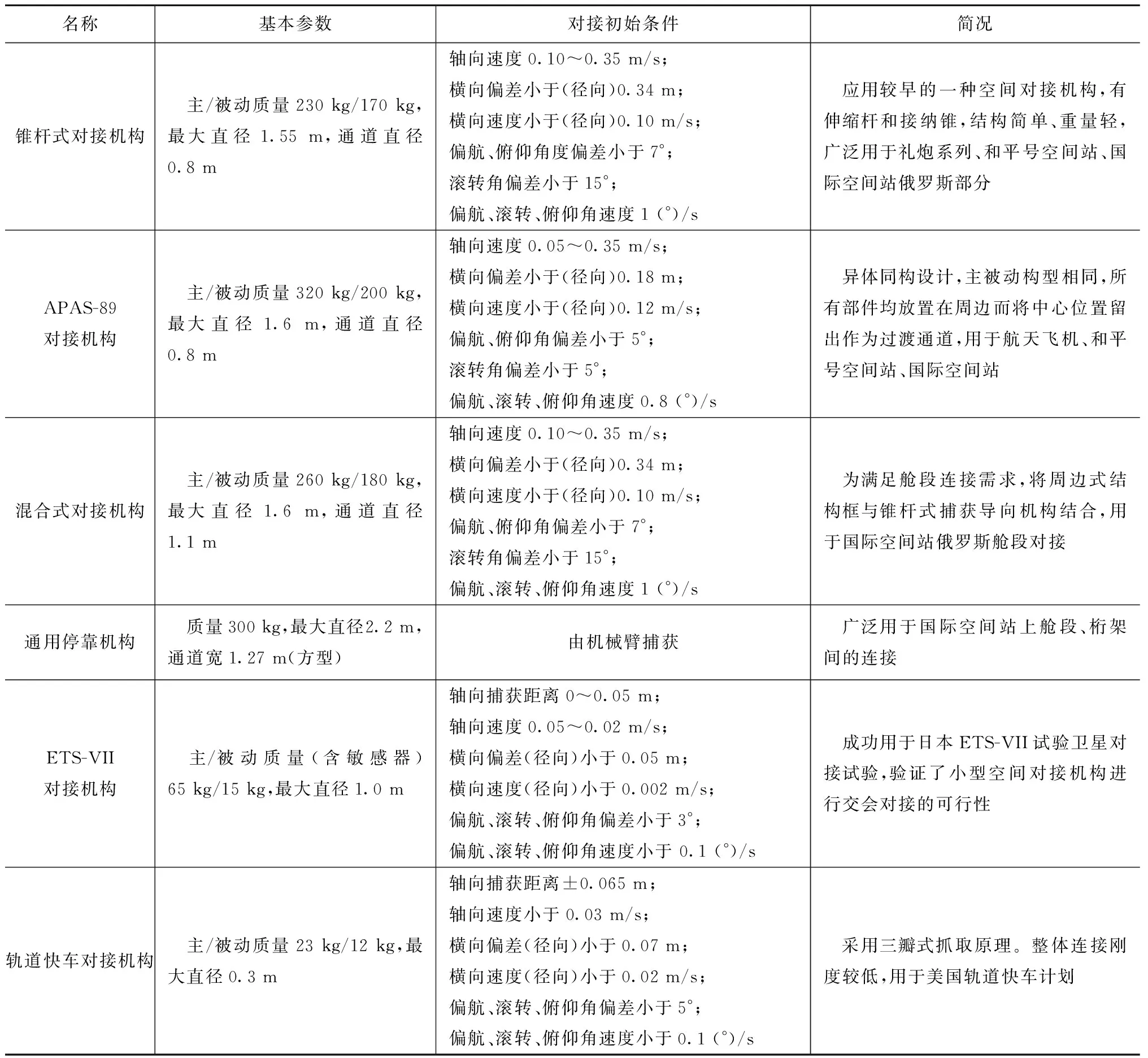
表1 主要空間對接機構特點
c)對接動力學仿真
空間對接過程首先是兩飛行器間的接觸和碰撞,但剛體碰撞問題的精確求解還處于理論研究階段,無法直接用于工程。由于機構的摩擦、潤滑、間隙、溫度的影響,傳動鏈的局部接觸和碰撞等難以建模,復雜機構動力學模型的精度難以保證、數值計算結果誤差較大,這給空間對接機構的動力學仿真造成了一定的難度。利用地面試驗對仿真模型進行修正和驗證成為一項重要而關鍵的研究內容。
d)對接機構試驗
空間對接機構有大量的活動部件同步協調工作,以保證兩飛行器在對接初始條件范圍內可靠對接。由于航天產品的地面試驗子樣少、可靠性安全性要求高等特殊要求,真實模擬在軌工作狀態,并通過有限的產品與試驗充分驗證空間對接機構在各種環境中的性能和功能成為技術難點。
空間對接機構需通過地面對接緩沖、連接密封、熱真空和對接能力試驗等考核,以驗證設計的正確性和合理性、生產工藝的穩定性,以及空間對接機構在空間環境條件下的功能和性能。地面模擬試驗設備復雜,制造難度大,其中以緩沖試驗臺和六自由度綜合試驗臺為代表。
2 我國空間對接技術實踐
2.1 發展歷程
我國從1994年起開展載人空間對接機構的論證,1996年完成周邊式對接機構緩沖系統試驗樣機研制。1997年4月,我國確定將異體同構周邊式(內翻式)方案作為工程實施方案,該方案既實現技術跨越,又能與國際兼容。1998年,完成空間對接機構原理樣機研制,2000年完成空間對接機構原理樣機改裝和試驗。2001年,開展了攻關樣機設計、攻關樣機研制、動力學仿真和試驗等關鍵技術,以及捕獲鎖、對接鎖、摩擦制動器、電磁阻尼器、電路浮動斷接器等8個部件和潤滑、密封兩項技術的攻關。初步確定了空間對接機構的基本參數和結構尺寸,掌握了空間對接機構總體設計技術和對接動力學仿真方法,并通過試驗驗證初步掌握了空間對接機構地面試驗的方法,突破了關鍵部件的研制技術和潤滑、密封技術[9]。
從2005年3月開始,我國空間對接機構的研制經歷方案、初樣、正樣等工程研制階段,先后研制出原理樣機、攻關樣機、方案產品和初樣產品等多套地面產品。2011年11月3日,成功實現了神舟八號飛船與天宮一號目標飛行器的首次在軌對接。
2.2 關鍵技術研究
2.2.1 總體技術方案
我國空間對接機構采用導向板內翻的異體同構周邊式構型(如圖2所示)。對接時成對使用,分別安裝在載人運輸飛船的軌道艙前端(主動對接機構)和目標航天器的實驗艙前端(被動對接機構)。捕獲子系統包括捕獲鎖、對接環和卡板器等,實現兩航天器間的導向、捕獲和初始柔性連接。傳動緩沖子系統包括絲杠聯系組合、主驅動組合、絲杠安裝組合和差動組合等,實現主動對接機構對接環的推出、相對碰撞能量的緩沖、兩航天器間位置姿態的校正和相互拉近。連接密封分離子系統包括對接鎖系、對接框、分離推桿、浮動斷接器和對接面密封圈等,實現飛行期間的剛性連接、密封、電路連通和分離。其中,電、氣、液路浮動斷接器可根據飛行任務需求確定是否安裝[2、10]。
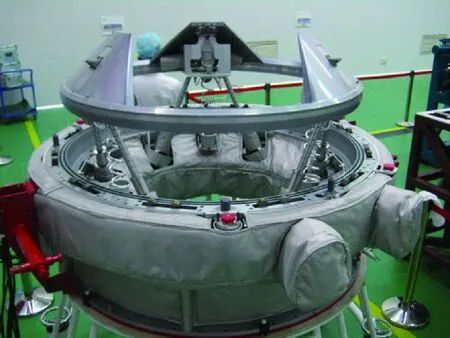
圖2 主動對接機構產品Fig.2 Engineering prototype of active docking mechanism
2.2.2 捕獲和緩沖設計
空間對接機構在對接接觸時,航天器在相對位置和姿態的6個自由度,以及速度、角速度存在偏差(對接機構的工作條件,定義為對接初始條件)。對接機構需克服初始偏差,完成兩航天器的相互捕獲。捕獲過程中,航天器通過空間對接機構互相碰撞,設計對接機構的動力學特性,可保證航天器在碰撞中相互接近,不會彈開,同時緩沖碰撞的能量,降低碰撞力,不會對航天器造成破壞。
為使兩個對接航天器的碰撞后相互靠近,通過設計恢復系數,確定捕獲的性能設計準則。定義碰撞前后的速度比為恢復系數S=|vk/v0|。此處:v0,vk分別為碰撞前后的速度。純滾轉正向碰撞較難捕獲,該狀態下在對接撞擊結束時刻總沖量為

緩沖性能的設計要求是:即使在最高對接速度下,也能消耗掉兩航天器間相互碰撞的動能,減小對接過程中的沖擊載荷,不會造成航天器太陽帆板等設備的損壞。空間對接機構需具有緩沖對接撞擊動能的能力,對接機構的緩沖能力(能容)需大于主、被動航天器相對運動和對接時發動機工作的能量之和,即
式中:Wengine為對接時發動機工作的能量;meq1為航天器的各向等效質量;vq2為捕獲后兩航天器相對運動速度;q1為捕獲后對接機構各方向緩沖器運動行程;q,qmax分別為對接機構各向緩沖器運動行程及其最大值;f為對接機構緩沖器的力。
空間對接機構的捕獲緩沖性能的設計,需同時滿足捕獲和緩沖兩個矛盾的條件。分析對接初始條件,發現各自由度上需緩沖的能量相差很大(如圖3所示)。因此對對接過程進行細化:對接過程中x向需緩沖消耗的能量最大,包括航天器相對接近的動能和發動機做的功,主要解決緩沖問題;其他方向需要緩沖的能量較小,但要求對接機構有良好的靈活性,以便完成捕獲操作。空間對接機構采用差動式緩沖系統(如圖4所示),利用差動器將對接過程的能量分解,運動分開,并由阻尼器和彈簧機構進行能量消耗和運動恢復。

圖3 對接時六自由度上碰撞能量Fig.3 Docking contact energy in six directions

圖4 空間對接機構差動原理Fig.4 Principle of mechanical differential for space docking mechanism
2.2.3 連接設計
空間對接機構的連接過程需要將兩個航天器連接成一個剛體,并保證連接面的剛度、密封性和連接的安全可靠,同時連接系統還能多次使用。為保證連接面的剛度和施力均勻,在對接面布置了兩組對接鎖共12套,保證密封可靠。每組對接鎖采用1套驅動機構驅動,這樣減輕了重量。連接狀態下對接面一直存在通道內的氣壓和振動等內外部載荷的作用。每組對接鎖的鋼索傳動原理如圖5所示。通過鋼索傳動,驅動機構動力傳遞至對接鎖繩輪,在繩輪帶動下對接鎖實現鎖定動作,并在此過程中形成鎖緊力。鎖緊時,靠近驅動機構一端的鋼絲繩所承受的力最大,然后逐漸遞減,直至靠近驅動機構另一端的鋼絲繩受力最小,圖5中鋼索張力沿鋼絲繩運動方向遞增。解鎖時,鋼絲繩受力大小順序與鎖緊過程相反[11]。
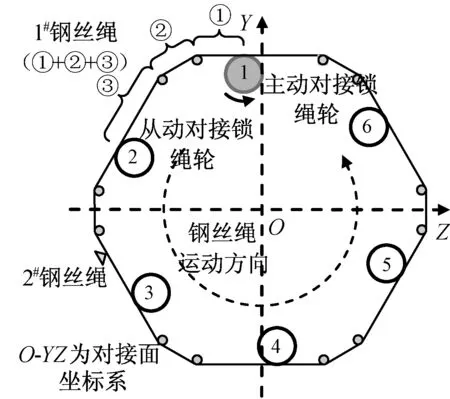
圖5 鋼索傳動原理Fig.5 Principle of tightwire transmision
為防止在連接過程中出現松弛,6段鋼索需在裝配時施加一定的預緊力,鋼索的平均預緊力
式中:R為對接鎖繩輪的半徑;Mh為每把對接鎖主動鎖鉤鎖緊時所需的最大驅動力矩;η為傳動系數,取決于傳動摩擦等,取值大于1。
為保證6把對接鎖運動的同步性,需控制主、被動鎖鉤嚙合量的一致性和鎖鉤間的摩擦[12]。鋼索導向傳動滑輪采取軸承支撐,降低了鋼索導向傳動摩擦,提高了運動的同步性。
主動對接鎖的結構如圖6所示。為防止對接鎖意外解鎖,鎖緊機構設計中采用鎖鉤自鎖形式,利用對偶的鎖鉤相互越過對方的最高點進入自鎖區。同時鎖鉤旋轉結構采用偏心設計,使外力造成鎖鉤進一步鎖緊的運動趨勢,保證連接可靠。對接鎖的驅動機構采用防逆傳動設計,只有在指令作用下通過電機驅動,對接鎖才會運動,保證對接連接的安全。

圖6 主動對接鎖Fig.6 Active structural hook assembly
2.2.4 空間對接機構其它設計要素
空間對接機構的機構產品需考慮在空間高低溫、真空條件下仍保持需要的動力學特性、運動靈活性和高精度高可靠。在設計過程中,綜合考慮動力學參數的協調,同時實現捕獲的柔順性和緩沖的大能容要求;對動力學參數進行優化,保證彈簧機構、阻尼器、緩沖傳動機構可實現;保證連接可靠的同時,滿足分離可靠的要求(如圖7所示)。

圖7 空間對接機構系統設計要素Fig.7 Desgin factors of space docking mechanism system
空間對接機構應在高低溫下穩定工作,傳動鏈設計考慮溫度影響,保證低溫下不能卡滯。彈性材料的剛度隨溫度發生變化,彈簧機構的性能在不同溫度下特性各異;電磁阻尼器由于材料電導率隨溫度變化,性能發生改變,因此需在大溫度范圍內進行系統設計和試驗驗證。
真空對空間機構運動的影響較大,主要體現在摩擦性能有較大變化。空間對接機構的摩擦主要分為對接環的碰撞滑動、鎖鉤在大載荷下相對滑動、彈簧機構內的滑動摩擦,以及捕獲緩沖過程中轉動部件的滾動摩擦。需根據不同載荷、速度和運動形式,設計固體潤滑、油脂潤滑等方式。
2.3 我國空間對接機構應用
2011年11月,神舟八號飛船與天宮一號目標飛行器成功完成了我國首次空間交會對接任務,并實現了2次在軌對接。
2012年6月,神舟九號飛船載有3名航天員與天宮一號目標飛行器成功完成我國首次載人交會對接任務,并進行了2次在軌對接。
2013年6月,神舟十號飛船載有3名航天員,與天宮一號目標飛行器成功完成對接任務,也進行了2次對接。
在上述所有對接與分離工作過程中,空間對接機構的捕獲、緩沖、校正、推出/拉近、剛性連接、密封、分離等功能均得到驗證,各項功能實現均滿足要求,整個對接過程約7 min 30 s,整個分離過程約3 min 30 s,遙測顯示各項工作狀態均正常。
我國正在實施的空間站工程中,其核心艙上將會布置多個被動對接機構,通過與各艙段的對接,實現我國空間站的在軌組建。
3 國外新型空間對接機構
3.1 載人弱撞擊式對接機構
3.1.1 背景需求
歐美在國際空間站項目中采用了俄羅斯的空間對接機構,如航天飛機采用APAS-95對接機構,而歐洲ATV貨運飛船安裝了俄羅斯的錐桿式對接機構[13]。為擺脫對俄羅斯空間對接機構的依賴,歐美早在20世紀90年代即對新型弱撞擊對接技術進行了研發。
新型弱撞擊對接技術是在總結已有空間對接系統的研制、使用經驗和教訓基礎上提出的。已有的空間對接機構需要采用較大的碰撞能量以克服捕獲緩沖系統的變形,補償對接偏差,實現捕獲,而弱撞擊對接技術可很大程度降低甚至消除碰撞能量需求。
針對大型航天器,特別是下一代深空航天器等的對接需求,美國和歐洲的研究者提出了新一代智能型的空間對接機構方案。與現有APAS對接機構相比,其主要特點如下[14-16]。
a)降低對接過程中的相對速度和碰撞力,適應抗沖擊能力較低的航天器,如大型低剛度的衛星等,減小對航天器的影響。
b)采用周邊式構型,具有完全異體同構,可實現兩兩相互對接。
c)有良好的適應能力,同一套空間對接機構可適應質量從2 t至數百噸航天器的對接任務。
由于目前的對接飛行任務都是經事先周密策劃并安排執行的,APAS等空間對接機構產品性能是在地面制造時確定的,對接任務是針對確定的目標。新一代空間對接機構則考慮可在軌調整緩沖能力,具良好的任務適應性,在國際合作和空間救援等方面有優勢。
3.1.2 基于力反饋閉環控制的弱撞擊對接系統
基于力反饋閉環控制的弱撞擊對接系統(LIDS),在早期由美國與歐空局合作開發,2001年后,分別進行獨立開發。美國的研發更領先,約翰遜航天中心(JSC)在2012年完成了工程樣機鑒定試驗[14、17]。
LIDS對接系統采用周邊式構型,去掉了差動式緩沖系統,增加了碰撞力測量,以及由電機絲杠組成的作動器。為實現弱撞擊的對接過程,其采用了力反饋閉環的主動控制方案,由傳感器測出對接碰撞力,實時計算需要的阻尼和緩沖力,并轉為對作動器的運動控制,使主動對接機構的對接環適應被動對接機構的位置和姿態,并阻尼和緩沖對接碰撞過程,實現捕獲。通過對控制參數的優化,降低碰撞力對航天器的作用。LIDS的工作原理如圖8所示。
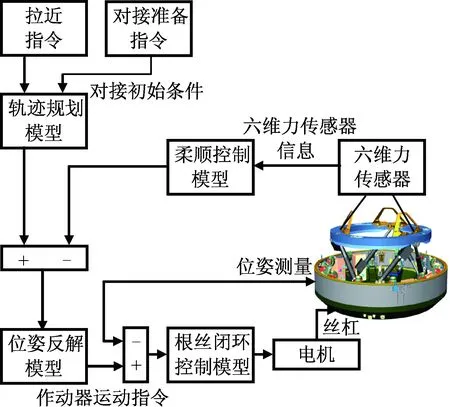
圖8 弱撞式對接機構工作原理Fig.8 Working principle of LIDS
這種空間對接機構能實現對接撞擊力的柔順適應,且緩沖性能調整靈活、任務適應性強。它將原機械式差動、緩沖改由控制算法和電機作動器完成,簡化了機械系統,增加了對傳感器的依賴,但導致控制模型與算法變得復雜,作動器響應頻率要求高,也增加了對航天器系統能源的負擔[17]。
3.1.3 半主動控制式對接系統
軟碰撞匹配衰減方案(SIMAC)對接系統方案由波音公司提出,在2012年4月獲得了NASA國際空間站項目管理部門資金支持[18]。該方案未采用力閉環柔順控制方式,本文稱之為半主動控制。SIMAC采用了與APAS對接機構兼容的窄環設計方案,由6個直線驅動裝置構成Stewart平臺。直線驅動裝置的內部傳動設置了離合器(如圖9所示),這樣直線驅動裝置可限定所施加的載荷。通過調節離合器力矩,也就能調節直線驅動裝置的載荷限值。在對接過程各階段中,每個直線驅動裝置均各自獨立工作而實現目標。6個直線驅動裝置相互獨立,它們之間無需機械連接及復雜的閉環控制。
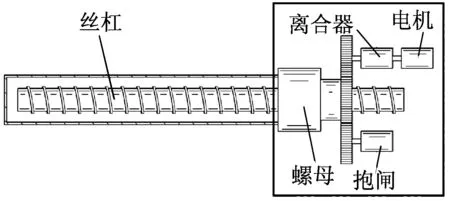
圖9 直線驅動機構Fig.9 Linear actuator assembly
在對接接口方面,SIMAC方案容易實現與APAS對接機構的兼容,SIMAC既可適應電磁捕獲方式,也可采用APAS-89機械式捕獲鎖。相對LIDS方案,SIMAC方案取消了復雜的力反饋閉環控制系統,6個直線驅動機構獨立驅動,其系統簡單、魯棒,既無笨重的機械系統,又規避了高精度傳感器和復雜控制電路的應用。
3.1.4 LIDS關鍵技術
弱撞擊對接機構的主要特點是能實現對接撞擊力的柔順適應,且緩沖性能調整靈活、任務適應性強,可在軌完成與大范圍變特性飛行器的多次對接。其涉及的關鍵技術如下[2]。
a)對接過程的控制算法設計
自適應控制是LIDS的核心技術。LIDS完成對接過程涵括了多個任務階段,控制算法需完成初始條件準備的路徑規劃、柔順對接捕獲、緩沖校正柔順動力學控制、拉近的路徑規劃。控制算法既要適應各種對接目標的對接任務的差異,還需考慮空間環境對系統參數的影響。這些導致控制算法的適應性設計難度很大。
b)空間高精度六維力傳感器設計
六維力傳感器的力測量信息是LIDS柔順控制過程的輸入量,其測量精度直接影響機構的緩沖效果。受空間高低溫環境的影響,傳感器可能會出現較嚴重零漂現象,影響力的測量精度。此外,六維力傳感器的解耦和標定也是研制中的關鍵。
c)直線驅動機構設計
直線驅動機構是自適應式對接機構柔順控制過程的執行機構,其運動精度及響應性能直接影響力柔順控制的效果。直線驅動機構的任務需求為負載大、響應快、運動偏差小,其控制器的控制策略、實時性和魯棒性對弱撞式對接機構的總體性能也有很大影響。
d)并聯機構的運動學與動力學求解
六自由度并聯機構的運動學逆解相對簡單,但正解較難,是機構運動學分析的難點之一。在半主動控制式對接機構設計中,空間對接機構在6個自由度方向上力-位移等效性能的需求各不相同。為實現在6個自由度方向緩沖耗能需求,需進行六自由度并聯機構的運動學和動力學求解,解決6根絲杠運動與載荷的協調。
3.2 停靠式對接機構
停靠式對接由空間機械臂和對接機構(或稱為停靠機構)共同參與完成[13]。空間機械臂作為捕獲裝置,實現航天器的捕獲操作,兩航天器后續的結構連接和密封等操作則由對接機構完成,如圖10所示。因此,停靠式對接屬于機械臂與對接機構協同工作的一種對接操作[13]。

圖10 停靠式對接Fig.10 Berthing
由于沒有捕獲要求,碰撞過程和緩沖由機械臂完成,簡化了對停靠機構的設計要求,但需要主動航天器在空間站附近進行位置和姿態的保持,并增加了機械臂的研制和控制難度,同時簡化了對接機構。
CBM是美國于90年代研制,主要為滿足空間站裝配的任務需求,內部直徑達1.8 m,支持空間站標準貨架的通過和轉移。CBM要求主動件和被動件兩個部分配合使用,部件主要包括捕獲鎖、導向板、螺栓式對接鎖等。CBM所有功能部件均安裝在周邊位置,中間讓出作為通道(如圖11所示);為增加機構工作的可靠性,將所有機構均安裝在對接框內側。一方面,對接框內側的空間環境相對較好,對接完成后,還能形成更優越的艙內環境;另一方面,該安裝方式便于航天員進行艙內維修[19]。
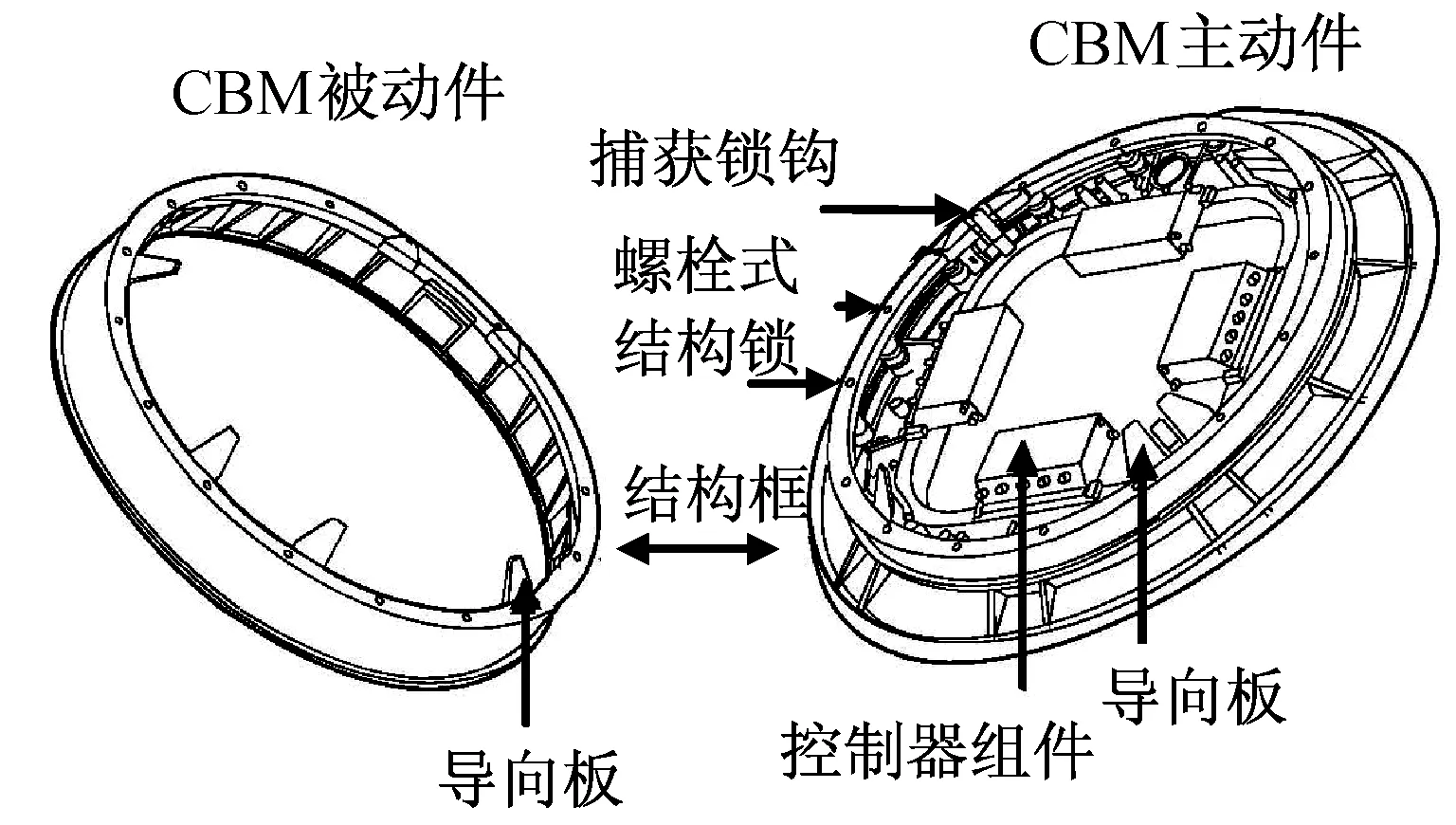
圖11 通用停靠機構Fig.11 Common berthing mechanism
空間停靠式對接主要采用停靠機構和空間機械臂完成連接任務。在國際空間站停靠中,直接參與操作的有空間機械臂、通用停靠機構和GNC系統,還需要飛行指控中心、航天員系統等的支持與配合。這是一個較復雜的空間任務,需多個系統共同協作完成[20]。
3.3 衛星對接機構
衛星對接是以實現在軌服務為目的而發展的,此類空間對接機構一般為輕小型對接裝置。1997年,日本用卡抓式對接機構實現了ETS-VII的軌道對接;2007年,美國采用三指式對接機構完成了軌道快車計劃的衛星對接演示驗證[21-22]。與載人航天任務的空間對接機構相比,該類空間對接機構的新特點如下。
a)衛星在軌服務操作主要任務包括燃料補給、在軌維護和數據傳輸等,無需實現大型航天器貨物傳輸和人員交換,其空間對接機構不要求有較大的通道,無保證密封的任務,因此不必進行剛性連接。
b)航天器的質量小,同時交會精度高,故對接碰撞能量小,緩沖系統設計較簡單,一般可采用捕獲-鎖緊一體式設計。該類空間對接機構功能集成,體積小、重量輕,也稱為輕小型對接機構。
這類空間對接機構的捕獲方式分為兩種。一種是捕獲后接觸,即在捕獲時主動對接機構形成閉合捕獲區域,捕獲被動對接機構,之后在閉合區域內,主、被動對接機構發生機械接觸碰撞,如日本的ETS-VII對接機構在捕獲前抱爪與鎖柄未發生機械接觸。另一種是接觸后捕獲,即在機械接觸后對接機構通過導向裝置進入鎖合位置實現捕獲,如美國的軟軸式對接機構[23]。
三指式對接機構的捕獲及連接功能采用三指的展開、收攏和拉回等動作實現。主動對接機構三指展開時,形成一定的捕獲包絡,可適應一定的對接初始條件。當三指收攏時,主動對接機構捕獲被動端結構。最后,通過將三指的拉回動作,實現兩航天器間的校正與結構連接。三指式對接機構的典型工作步驟如圖12所示[22]。
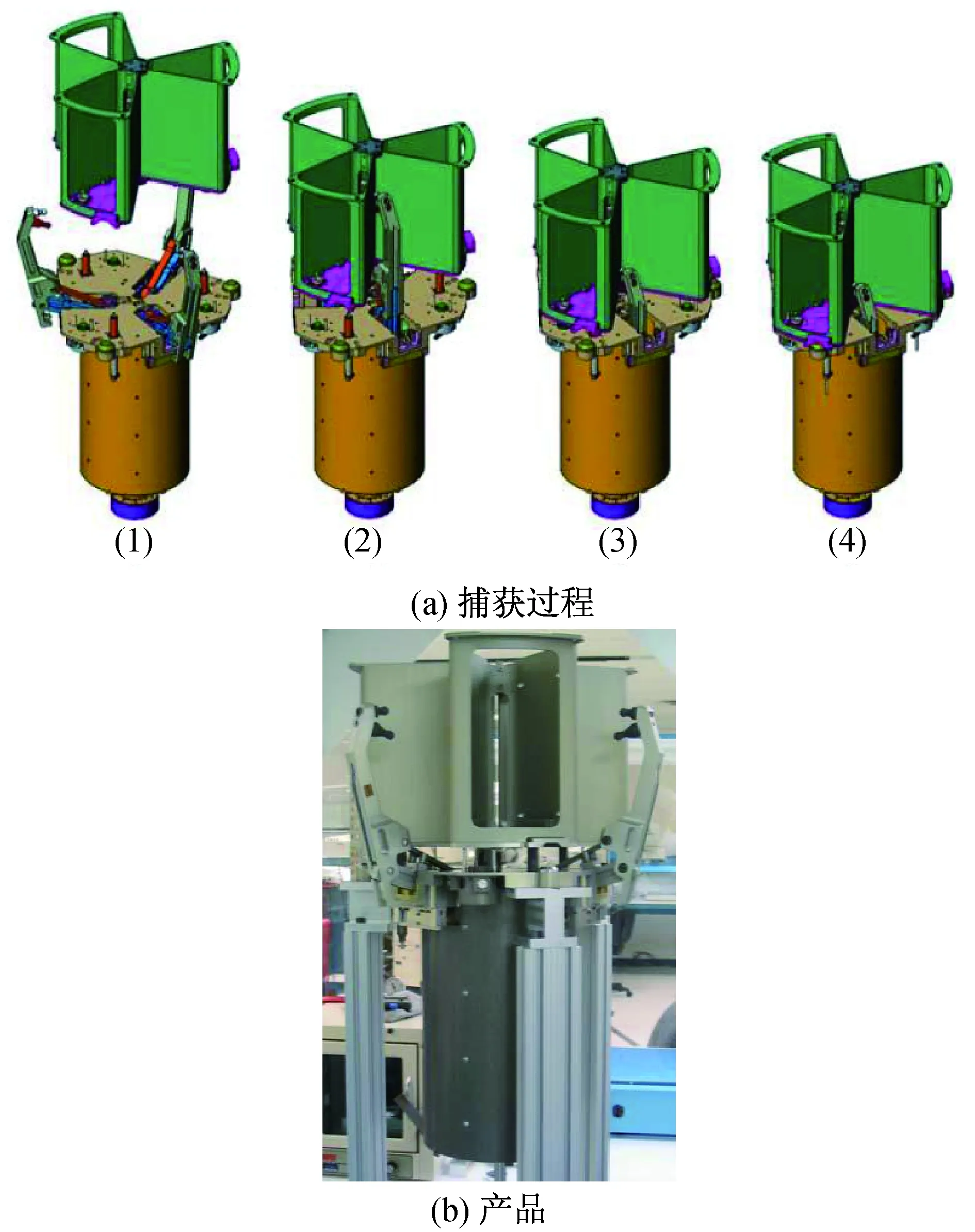
圖12 三指式對接機構工作過程和產品Fig.12 Working process and prototype of three-finger docking mechanism
4 我國空間對接技術發展路線
我國空間對接技術的發展路線應基于國內需求和相應的技術基礎制定。我國空間對接技術發展應考慮以下幾個方面。
a)開展弱撞擊對接系統研究,結合國內需求,提出適合我國國情的新型空間對接機構方案。一方面,在選擇新型空間對接技術途徑時,需多方面權衡利弊,吸取已有的空間對接機構的研制經驗與教訓,并能在此基礎上進行技術創新。半主動控制式對接系統更適于我國未來空間對接機構的需求。另一方面,新型空間對接機構還應滿足我國空間站的對接需求,可實現較大的對接通道要求。國際空間站的美國艙段采用CBM滿足大型設備對轉運通道的需求,而俄羅斯則采用混合式對接機構實現大直徑的對接通道。我國的空間站上僅有APAS對接機構,其對接通道為Φ800 mm,較大的貨物轉運則需從出艙通道進出空間站。因此,我國未來的新型空間對接系統應能滿足大對接通道的需求。
b)針對衛星在軌組裝、在軌補加、模塊更換和功能重構等在軌服務需求,開展可重復、自適應連接與分離技術研究,實現衛星用對接機構的模塊化和標準化。
c)將合作目標對接技術向非合作目標捕獲方向拓展,以適應未來空間碎片清理的需求。
5 結束語
本文對空間對接機構的技術進行了綜述。從空間對接技術發展歷程看,錐桿式對接機構和APAS對接機構的綜合性能最全面,目前國際空間站上仍在應用。這類對接機構仍是未來一段時期內主流。但未來空間對接機構技術的發展有其新特點:第一,載人航天用的大型空間對接機構,為降低對接碰撞力對大型柔性結構的影響,提高對接過程安全性,提高任務適應能力,正在向弱撞擊式的發展方向發展。同時為適應國際合作和空間救援等需求,也逐步向國際標準化靠攏。第二,隨著在軌服務任務需求的出現,輕小型對接機構是未來在軌服務技術發展的核心。輕小型對接機構向小型、集成、輕量化設計方向發展,為空間模塊裝配、暴露載荷安裝、衛星補給、裝配、空間安全領域等提供了有效的技術支撐。由于任務需求不斷變化,操作種類繁多,輕小型對接機構的發展趨勢呈現多樣化。第三,隨著智能機構技術的應用,基于機械臂技術的對接會不斷出現,這為空間對接提供了新的技術方向。
[1] 周建平. 空間交會對接技術[M]. 北京: 國防工業出版社, 2013: 1-19, 214-282.
[2] 張崇峰, 陳寶東, 鄭云青, 等. 航天器對接機構[M]. 北京: 科學出版社, 2016.
[3] OGILVIE A, ALLPORT J, HANNAH M, et al. Autonomous robotic operations for on-orbit satellite servicing[J]. Proc of SPIE, 2008, 6958: 695809.
[4] 周建平. 載人航天交會對接技術[J]. 載人航天, 2011, 17(2): 1-8.
[5] 婁漢文, 曲廣吉, 劉濟生. 空間對接機構[M]. 北京: 航空工業出版社, 1992.
[6] URGLITI E, BELIKOV E M. Docking berthing systems for international space station: aproposal for CRV docking and berthing system[R]. IAF-99-T.2.03, 1999.
[7] 劉志, 崔宇新, 張崇峰. 國際對接系統標準探究[J]. 載人航天, 2014, 20(2): 152-158.
[8] 陳寶東, 唐平. 空間對接機構技術及其研制[J]. 上海航天, 2005, 22(5): 6-8.
[9] 陳寶東, 鄭云青, 邵濟明, 等. 對接機構分系統研制[J]. 上海航天, 2011, 28(6): 1-6.
[10] 張崇峰, 柏合民. 飛船空間對接機構技術[J]. 中國科學: 技術科學, 2014, 44(1): 22-26.
[11] 鄭云青, 柏合民, 劉志. 鋼絲繩的彈性變形對鎖系機構運動同步性的影響分析[J]. 載人航天, 2009, 15(3): 59-64.
[12] 鄭云青, 邵濟民, 程芳華, 等. 結構鎖解鎖同步性影響因素分析[J]. 上海航天, 2015, 32(2): 50-53.
[13] CAPORICCI M. IBDM: the international berthing docking mechanism for human missions to low earth orbit and exploration[C]// 61stInternational Astronautical Congress. Prague: NASA, 2010: 10, 8569-8576.
[14] CLSLAGHI M, SANTINI C. The Russian docking system and the Automated Transfer Vehicle: a safe integrated concept: 3rdIAASS Conference “Building a Safer Space together”[C]// Rome: IAASS, 2008.
[15] HATFIELD S. NASA Docking System (NDS) technical integration meeting[C/OL]. [2010-11-17]. http://docking standard. nasa. gov/Documents/NDS_TIM_presentation. pdf.
[16] NASA. Meet the international docking adapter[EB/OL]. [2015-11-23]. http://www.nasa.gov/feature/meet_the-international-docking-adapter.
[17] Johson Space Center. NASA decides to adopt Boeing SIMAC design for docking and its retiring the LIDS design[EB/OL]. [2012-11-13]. http://www. Sapceref.com/news/viewsr.html?pid=42614.
[18] MOTAGHEDI P, GHOFRANIAN S. Feasibility of the soft impact mating attenuation concept for the NASA docking system[J]. Reports on Progress in Physics, 2013, 63(62): 1573-1659.
[19] MCLAUGHLIN R J, WARR W H. The common berthing mechanism (CBM) for International Space Station: 31stInternational Conference on Environmental Systems[C]// SAE Paper, 2001-01-2435.
[20] FESHE W. Automated rendezvous and docking of spacecraft[M]. Oxford: Cambridge University Press, 2003: 283-335.
[21] KAWANO I, MOKUNO M, KASAI T, et al. Result of autonomous rendezvous docking Experiment of Engineering Test Satellite-VII[J]. Journal of Spacecraft and Rockets, 2001, 38(1): 105-111.
[22] CHRISTIANSEN S, NILSON T. Docking system mechanism utilized on Orbital Express Program[C]// Proceedings of the 39th Aerospace Mechanisms Symposium. Huntsville: NASA, 2008: 207-220.
[23] PAVLICH J, TCHORVK P, HAYS A, et al. KC-135 zero G testing of a micro satellite docking mechanism[J]. Proceedings of SPIE, 2003, 5088: 31-42.
Review of Space Docking Mechanism and Its Technology
ZHANG Chong-feng1, LIU Zhi2
(1. Shanghai Academy of Spaceflight Technology, Shanghai 201109, China;2. Aerospace System Engineering Shanghai, Shanghai 201109, China)
The space docking mechanism and its technology were reviewed in this paper. The space docking mechanism was divided into manned large docking mechanism and non-sealing small docking mechanism. The main applications of space docking mechanism were described, which were materials supply and astronaut rotation, on-orbit assembly of large spacecraft or platform, on-orbit servicing of spacecraft, and structure optimization of spacecraft during flying. The development history was divided into four phases which were early exploration, application, maturity and further development. The characteristics of main space docking mechanisms were inducted. The key points of overall design, docking mechanical simulation, docking mechanism experiment and development of critical parts in docking were analyzed. The development history of space docking mechanism in China was recalled, and so were the key technologies of overall technical project, design of capture and buffering, design of connection and other design factors. The important achievement of space docking mechanism application in domestic was introduced briefly. The research background, progress and relative key technologies of new types of space docking mechanisms in abroad were introduced, which were manned low impact docking system, berthing mechanism and satellite docking mechanism. The development road of space docking technology in future for China was put forward. It suggests that China shall develop low impact docking system and satellite docking mechanism and progress space docking technology for extending from cooperative space object to non-cooperative space object.
Space docking; Space docking mechanism; Capture; Buffering; Androgynous peripheral assembly system; Peripheral docking mechanism; Low impact docking system; Common berthing mechanism; Satellite docking mechanism
1006-1630(2016)05-0001-11
2016-09-05;
2016-09-28
張崇峰(1968—),男,博士,研究員,神舟飛船和天宮空間實驗室副總設計師,獲國家科技進步特等獎1項,省部級科技進步獎多項;全國優秀科技工作者、國防科技工業“511人才工程”學術技術帶頭人,主要研究方向為航天器對接技術和航天器機構設計。
V526
A
10.19328/j.cnki.1006-1630.2016.05.001
