平面柔性鉸鏈機構自動建模方法
2016-12-20 06:18:18李佳杰劉小院陳貴敏
西安電子科技大學學報 2016年6期
關鍵詞:變形
李佳杰,劉小院,陳貴敏
(西安電子科技大學 機電工程學院,陜西 西安 710071)
?
平面柔性鉸鏈機構自動建模方法
李佳杰,劉小院,陳貴敏
(西安電子科技大學 機電工程學院,陜西 西安 710071)
從圖論的基本概念出發,得到了柔性鉸鏈機構有向圖表示,并針對平面柔性鉸鏈機構提出一種改進的雙色圖表示方法.通過十字鏈表的數據結構形式將柔性鉸鏈機構的雙色圖表示映射到計算機中,按照所需的運算順序遍歷雙色圖,依次調用相應的函數表達式,從而實現了柔性鉸鏈機構運動靜力學模型的自動生成.以差分微位移放大機構為例,將基于圖表示的平面柔性鉸鏈機構自動建模方法計算結果與有限元仿真分析結果對比,兩者的相對誤差為4.89%,表明該自動建模方法是可行的.
平面柔性鉸鏈機構;圖論;自動生成
柔性鉸鏈機構是用柔性鉸鏈替代傳統的運動副來連接剛性構件并利用其彈性變形實現運動的集中柔度式柔順機構[1].柔性鉸鏈機構具有無機械摩擦、無間隙、無需潤滑及分辨率高等優點,在現代傳動系統、光學系統、醫療設備、生物工程、集成電路制造和微細加工等宏觀及微觀領域中被廣泛應用[2].
柔性鉸鏈機構的建模是分析柔性鉸鏈機構性能的基礎.文獻[3]基于偽剛體模型對集中柔度式柔順機構進行了建模、分析與綜合.文獻[4]提出了一種擴展的偽剛體模型法,求解全柔性機構的位置解.文獻[5]結合虛功原理和偽剛體模型建立了柔性鉸鏈機構的靜力學模型,并基于所提出模型設計了一種新型位移放大/縮小柔性鉸鏈機構.文獻[6]考慮壓電疊堆產生的輸入力對柔性機構輸出位移的影響,建立了柔性鉸鏈機構的靜力學模型.文獻[7]提出了一種確定柔性鉸鏈機構位置的迭代方法,并進行了柔性鉸鏈機構的運動學分析和靜力學分析.偽剛體模型由于忽略柔性鉸鏈的線位移變形,精度不高,而文獻[7]提出的迭代算法主要用于分析簡單的連桿機構.因此筆者以平面柔性鉸鏈機構為研究對象,在圖表示法的基礎之上,提出一種平面柔性鉸鏈機構改進的雙色圖表示,更為清晰和準確地反映柔性鉸鏈機構的拓撲關系.按照所需的運算順序遍歷雙色圖的頂點和邊,即可依次調用相應的函數表達式,最終實現了柔性鉸鏈機構運動靜力學模型的自動生成.
1 柔性鉸鏈機構圖表示法
柔性鉸鏈機構由剛性桿通過柔性鉸鏈連接組成,而圖是由點通過邊連接組成[8].因此,剛性桿與點、柔性鉸鏈與邊之間形成對應關系.給定一個機構,必然可得到一個描述它的圖.將柔性鉸鏈機構的剛性桿用頂點表示,鉸鏈用有向邊(弧)表示,則得到柔性鉸鏈機構的有向圖.為便于描述,作以下約定: 輸入桿對應的頂點為根頂點并作為圖的第1層,輸入桿鄰接的剛性桿對應的頂點放置在第2層,當同一層有多個頂點時則依據實際連接位置排列; 與第2層頂點鄰接的頂點放置在第3層,依此規律確定所有頂點在圖中的相對位置.相鄰接的頂點之間用有向邊連接,箭頭由上層指向下層.因此,所得到的圖表示具有以下特性:
(1) 方向性: 柔性鉸鏈機構的有向圖表示從輸入端指向輸出端;
(2) 連通性: 柔性鉸鏈機構常常是一體化加工而成,因此其對應的圖中不存在孤立頂點,且存在一條或多條從根頂點到葉頂點的通路;
(3) 嚴格的層次關系: 柔性鉸鏈機構中各構件層次關系明顯,即在圖表示中不同構件所對應的點和邊應依據某些規律分層排列.
根據上述約定,圖1為差分微位移放大機構及其有向圖表示.
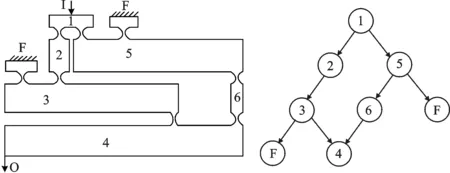
圖1 差分微位移放大機構及其有向圖表示
2 柔性鉸鏈機構尺寸特征定義
通常一個柔性鉸鏈只連接兩個剛性桿,因此,柔性鉸鏈可由4位組成的惟一標識符[9]表示: 第1位是字母“h”,表示柔性鉸鏈; 第2位是與鉸鏈連接的前一個桿號; 第3位是連接符“-”; 最后一位是與鉸鏈連接的后一個桿號.例如,連接桿2和桿3的鉸鏈命名為h2-3.柔性鉸鏈的長度用L表示,方向角由α表示(角度和角位移均以逆時針為正).
柔性鉸鏈機構中常見的剛性桿有二副桿、三副桿和多副桿.對于二副桿,桿長就是兩個鉸鏈之間的距離.一般情況下,三副桿會有兩條路徑通過,根據在剛性桿上且同路徑方向的兩個鉸鏈確定一個距離,由兩端柔性鉸鏈給其命名,也是惟一的.剛性桿標識符有6位: 第1位是字母“R”,表示剛性桿; 第2位~第4位是前一個鉸鏈的名字并省略首字母h; 第5位是連接符“-”; 第6位是后一個鉸鏈名字的末位.例如,在桿3上由鉸鏈h2-3到鉸鏈h3-4的這段路徑命名為R2-3-4.輸入桿由輸入端和其連接的鉸鏈編號命名.輸入端用字母“I”表示,輸入桿的標識符記為RI-1-×; 類似地,機架用字母“F”表示,輸出端用字母“O”表示.剛性桿長度用d表示,其在全局坐標系下的方向角用θ表示.
根據上述命名規則,圖2給出了差分微位移放大機構所有尺寸特征的定義.
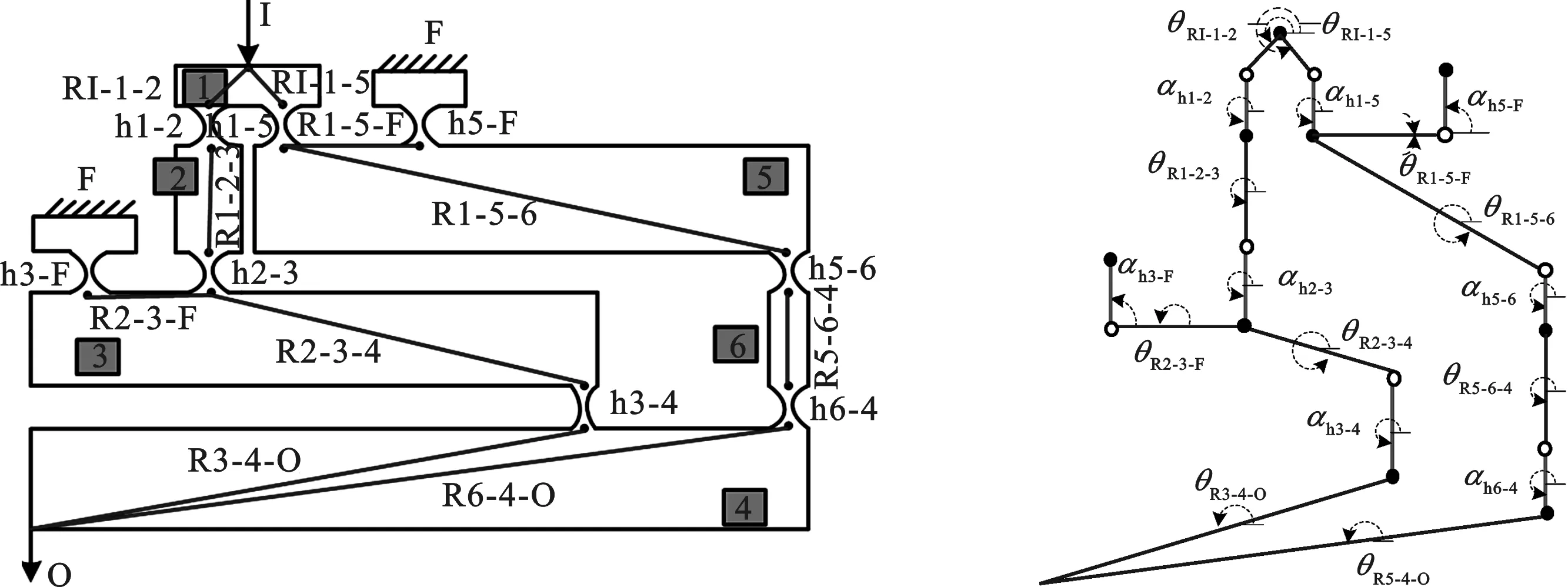
圖2 差分微位移放大機構各構件命名及其角度定義

圖3 差分微位移放大機構改進雙色圖表示
3 柔性鉸鏈機構的改進雙色圖表示
常規的雙色圖[10]以黑色頂點表示剛性桿,以白色頂點表示柔性鉸鏈,當一柔性鉸鏈與某剛性桿連接時,則用一條邊將它們各自對應的白色頂點和黑色頂點相連接.但是單色圖表示和常規雙色圖表示只是簡單地將桿與鉸鏈的連接關系表示出來,并沒有把柔性鉸鏈機構的尺寸特征(參與計算的剛性桿長度)通過圖表示加以區別.為此,筆者提出一種改進的雙色圖表示,其建立規則為: 以黑色實心頂點‘●’表示常規桿(入度和出度都不大于1的點),以左黑右白頂點‘’表示分歧桿或匯聚桿,當機構中有多副桿時,可將雙色頂點根據所需拓展到三色或多色; 以弧表示柔性鉸鏈,當兩剛性桿之間有柔性鉸鏈直接連接時,兩構件對應的兩頂點之間用一條弧連接.圖3為差分微位移放大機構的改進雙色圖表示.
4 柔性鉸鏈機構的運動靜力學模型
分析與求解柔性鉸鏈機構,需從3個方面考慮:靜力學,幾何學和柔性鉸鏈的載荷-變形[11].即綜合了靜力平衡方程、變形協調方程(幾何方程)和柔性鉸鏈的載荷-變形方程.
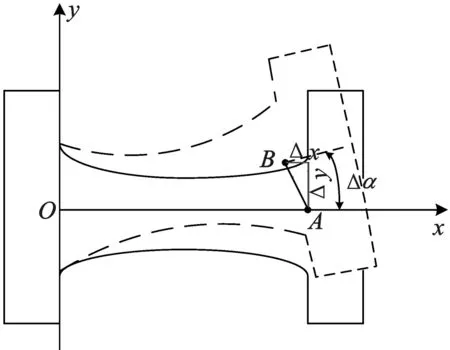
圖4 單個鉸鏈的受力分析
4.1 靜力平衡方程
柔性鉸鏈機構中除柔性鉸鏈外,其余部分都視為剛體.對單個柔性鉸鏈可視為一端固定、另一端自由的梁單元進行受力分析,如圖4所示(O點為固定端、A點為自由端).
設柔性鉸鏈在A點處受載荷F=[Fx,Fy,M]T作用,B點為變形后鉸鏈末端位置,鉸鏈的相應變形 X= [Δx,Δy,Δα]T,則在圖4所示總體坐標系xOy下,柔性鉸鏈末端B點位置坐標為
設剛性桿i末端與柔性鉸鏈j連接,當剛性桿i轉動一定角度后,其在總體坐標系下位置坐標為
其中,di為剛性桿i的長度,θi為初始角度,Δθi為角位移.柔性鉸鏈j變形后在總體坐標系下位置坐標為
其中,Lj為柔性鉸鏈j的長度,αj為初始角度,Δxj和Δyj為鉸鏈末端沿x軸和y軸方向的線位移.
設差分微位移放大機構中各個柔性鉸鏈所受載荷Fj=[Fxj,Fyj,Mj]T,給輸入端Y方向施加的載荷為FI,按層分布寫出其靜力平衡方程.因篇幅有限只列出第1層平衡方程.
4.2 幾何方程
柔性鉸鏈機構受力后輸出端位移應等于輸入端位移與各構件變形的矢量和.當給柔性鉸鏈機構施加載荷時,剛性桿i的位置坐標變化量為
而剛性桿i末端連接的柔性鉸鏈j的位置坐標變化量為
因此,各條路徑的幾何方程為輸入端位移、剛性桿位置變化和柔性鉸鏈變形的累加,最終得到整個柔性鉸鏈機構的幾何方程.差分微位移放大機構的第一條路徑幾何方程如下:
4.3 柔性鉸鏈的載荷變形方程
當柔性鉸鏈局部坐標系與機構的總體坐標系不平行時,局部坐標系下柔性鉸鏈的柔度矩陣需要通過旋轉變換矩陣R轉換到整體坐標系下,即
其中,
其中,K=C-1,是鉸鏈的剛度矩陣.

圖5 十字鏈表存儲結構:頂點結構和弧結點結構
5 自動建模的軟件實現
5.1 柔性鉸鏈機構數據存儲
為實現柔性鉸鏈機構運動靜力學模型的自動生成,首先要使柔性鉸鏈機構的雙色圖表示準確無誤地映射到計算機內存中.在數據結構中,十字鏈表是有向圖的一種鏈式存儲結構.在十字鏈表表示法中,頂點表的結點結構和邊表的弧結點結構分別如圖5所示.
頂點結點包含3個域: Vertex存儲與頂點相關的信息,用于描述剛性桿特征: 頂點的名稱、桿長、初始角度; Firstin指示該頂點的第1條射入弧; Firstout指示該頂點的第1條射出弧.
弧結點包含5個域: TailVertex和HeadVertex分別指示弧尾和弧頭兩個頂點在圖中的對應位置; HeadNext指向與之具有相同弧頭的下一條弧; TailNext指向與之具有相同弧尾的下一條弧; Info保存該弧的相關信息: 鉸鏈名稱和幾何參數.
5.2 遍 歷
就本質而言,遍歷是一種模式,可以直接應用圖已有的遍歷算法或根據要求定義新的遍歷算法.
廣度優先搜索是一個分層的搜索過程,從圖的第1層開始,從上至下逐層遍歷,在同一層中,則按從左至右的順序對頂點逐個訪問.圖的廣度優先搜索最終輸出一組頂點的連續序列,而機構的變形與柔性鉸鏈有密切關系,需將剛性桿和其連接的鉸鏈設為一組,對應于圖中就是頂點和其連接的邊,因此只需在廣度優先搜索的基礎上將弧的編號隨關聯頂點的編號一同并按層輸出,將此過程稱為“柔性鉸鏈機構的層遍歷”.
在有向圖中,從頂點v0到頂點vn的一條路徑是圖的一個點弧交替序列(v0e1v1e2…vn-1envn),其中vi-1和vi分別是弧ei的始點和終點,i=1,2,…,n.機構中輸入桿對應圖的根頂點,機架和輸出桿都對應葉頂點.一般根頂點為一個,葉頂點有多個,由根頂點到葉頂點的所有路徑記為基本路徑組P,從根頂點出發,只能沿著弧的正方向行走,如果遇到分岔的多條弧要選擇,則按從左至右的順序優先選擇最左邊的岔道,并做標記,然后繼續向下直至一個葉頂點.此時,第1條路徑搜索結束.如果圖中存在其他葉頂點沒有遍歷,則繼續從根頂點開始,遇到分岔路時,從未標記過的岔道向下搜索,當搜索至葉頂點時結束; 如果圖中還存在一條從根頂點到葉頂點的其他路徑未遍歷,則繼續從根頂點開始,直至圖中所有頂點和弧都查找過為止.

圖6 差分微位移放大機構變形圖
通過對圖進行層和基本路徑組的遍歷在計算機中實現機構函數表達式.將剛性桿和柔性鉸鏈相應的計算方程封裝在各自對應的結點內,用圖的遍歷結果調用各個函數表達式.柔性鉸鏈機構的靜力平衡方程是按層遍歷的順序依次調用對應的u和v函數,幾何方程是根據基本路徑組調用Δu和Δv函數.只要按照機構的圖表示正確遍歷各個結點,并按順序調用各個結點中對應的子函數完成各種分析的相關計算,從而實現柔性鉸鏈機構的自動建模.
6 建模結果
差分微位移放大機構中柔性鉸鏈為橢圓弧-倒角型柔性鉸鏈[12],材料選用45#鋼,其楊氏模量為 200 GPa,泊松比為0.3,輸入位移為 0.001 mm,其有限元分析得到的變形圖如圖6所示.基于圖表示的平面柔性鉸鏈機構自動建模方法計算結果和有限元方法計算結果見表1.

表1 自動建模法和有限元法結果對比
表1中的數據表明: 自動建模方法和有限元方法計算結果的相對誤差為4.89%.理論解與仿真解之間存在一定的偏差,這是由模型的簡化造成的.在建模過程中,忽略了柔性鉸鏈機構中除柔性鉸鏈外的其他部分的微小變形.
7 結 束 語
將圖論這一數學理論應用到平面柔性鉸鏈機構自動建立運動靜力學模型中,拓展了圖論在工程技術方面的應用范圍.筆者從圖論的基本概念出發,針對平面柔性鉸鏈機構提出一種改進的雙色圖表示方法.通過十字鏈表的數據結構形式將柔性鉸鏈機構的圖表示映射到計算機中,按照所需的運算順序遍歷雙色圖,即可依次調用相應的函數表達式,最終實現了柔性鉸鏈機構運動靜力學模型的自動建立.以差分微位移放大機構為例,基于圖表示的平面柔性鉸鏈機構自動建模方法計算結果與有限元仿真分析結果對比,兩者的相對誤差為4.89%,表明該自動建模方法是可行的.
[1] HOWELL L L. Compliant Mechanisms[M]. New York: John Wiley & Sons, 2001.
[2]勾燕潔, 陳貴敏, 賈建援. 柔順五桿三穩態機構的設計方法[J]. 西安電子科技大學學報, 2015, 42(4): 57-62.
GOU Yanjie, CHEN Guimin, JIA Jianyuan. Design Approach for a Compliant Five-bar Tristable Mechanism[J]. Journal of Xidian University, 2015, 42(4): 57-62.
[3]HOWELL L L, MIDHA A. Loop-Closure Theory for the Analysis and Synthesis of Compliant Mechanisms[J]. Journal of Mechanical Design, 1996, 118(1): 121-125.
[4]于靖軍, 畢樹生. 基于偽剛體模型法的全柔性機構位置分析[J]. 機械工程學報, 2002, 38(2): 75-78.
YU Jingjun, BI Shusheng. Kinematics Analysis of Compliant Mechanisms Using the Pseudo-rigid-body Model[J]. Journal of Mechanical Engineering, 2002, 38(2): 75-78.
[5]MENG Q L, LI Y M, XU J. A Novel Analytical Model for Flexure-based Proportion Compliant Mechanisms[J]. Precision Engineering, 2014, 38(3): 449-457.
[6]CHOI K B, LEE J J. Static Model for Flexure-based Compliant Mechanism Driven by Piezo Stacks[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2008, 222(4): 703-709.
[7]VENANZI S, GIESEN P. A Novel Technique for Position Analysis of Planar Compliant Mechanisms[J]. Mechanism & Machine Theory, 2005, 40(11): 1224-1239.
[8]王桂平, 王 衍, 任嘉辰. 圖論算法理論、實現及應用[M]. 北京: 北京大學出版社, 2011.
[9]PARRISH B E, MICHAEL MCCARTHY J, EPPSTEIN D. Automated Generation of Linkage Loop Equations for Planar One Degree-of-freedom Linkages, Demonstrated up to 8-Bar[J]. Journal of Mechanisms and Robotics, 2015, 7(1): 011006.
[10]楊廷力. 機械系統基本理論——結構學·運動學·動力學[M]. 北京: 機械工業出版社, 1996.
[11]徐芝綸. 彈性力學簡明教程[M]. 北京: 高等教育出版社, 2002.
[12]CHEN G M, LIU X Y, DU Y L. Elliptical-arc-fillet Flexure Hinges: Toward a Generalized Model for Commonly Used Flexure Hinges[J]. Journal of Mechanical Design, 2011, 133(8): 602-610.
(編輯:王 瑞)
Automatically generating kinetostatic model for planar flexure-based compliant mechanisms
LIJiajie,LIUXiaoyuan,CHENGuimin
(School of Mechano-electronic Engineering, Xidian Univ., Xi’an 710071, China)
Based on the concept of graph theory, a new two-colored digraph representation of planar flexure-based compliant mechanisms is presented, which is mapped to computers by the data structure of the orthogonal list. Then, the vertices and edges of the diagraph are traversed in the order of operations, to automatically generate kinetostatic models for planar flexure-based compliant mechanisms. The process of the automatically generating kinetostatic model for planar flexure-based compliant mechanisms based on graph theory is illustrated by applying it to the differential micro-displacement amplification mechanism. The results achieved by the automatically generating model and the finite element method are in good agreement, which validates the effectiveness of the proposed methods.
planar flexure-based compliant mechanisms;graph theory;automatic generation
2015-11-10
時間:2016-04-01
國家自然科學基金資助項目(51175396);中央高校基本科研業務費專項資金資助項目(K5051204021,xjs15041);陜西省科技統籌資助項目(2014KTCQ01-27)
李佳杰(1986-),女,西安電子科技大學博士研究生,E-mail:lijiajie1987@163.com.
陳貴敏(1978-),男,教授,E-mail:guimin.chen@gmail.com.
http://www.cnki.net/kcms/detail/61.1076.tn.20160401.1622.026.html
10.3969/j.issn.1001-2400.2016.06.013
TH122
A
1001-2400(2016)06-0074-06
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
