低成本三維激光掃描儀的設計與實現
2016-12-20 09:59:57宗文鵬李廣云
測繪通報 2016年11期
宗文鵬,李廣云,王 力
(信息工程大學,河南 鄭州 450001)
?
低成本三維激光掃描儀的設計與實現
宗文鵬,李廣云,王 力
(信息工程大學,河南 鄭州 450001)
三維激光掃描儀是目前三維空間信息獲取中最先進的儀器,但商業三維激光掃描儀價格昂貴,限制了其廣泛應用。本文利用二維激光掃描儀、角度編碼器與精密轉臺設計了一款低成本中距離三維激光掃描儀,系統介紹了其掃描原理、硬件組成及軟件實現,并對室內場景的掃描和平面特征識別進行了定性分析,還通過平面擬合與點位精度測試進行了定量分析,結果顯示所得激光掃描點云數據質量較好。
低成本三維激光掃描儀;角度編碼器;精密轉臺;點云
三維激光掃描技術是一門新興的空間三維信息獲取技術,是測繪領域繼GPS技術后的又一次技術革命[1],是當前該領域研究的熱點之一。它突破了傳統的單點測量模式,可以快速、準確、無接觸地獲取目標表面的海量三維信息,實現了實物的數字化,因而又被稱為實景復制技術。目前,三維激光掃描技術已被廣泛應用于數字城市、虛擬現實、數字測圖、逆向工程、考古與文物保護、游戲及電影制作等領域[2-4]。國外在該方面的研究起步較早,技術相對先進,產品相對成熟,并且已可為用戶提供完整高效的解決方案。生產三維激光掃描儀的廠商主要有奧地利的Riegl公司、瑞士的Leica公司、加拿大的Optech公司、美國的Trimble、Faro和Metris公司,以及日本的Topcon公司等;國內幾家公司也推出了自主研發的幾款產品,但是目前三維激光掃描儀仍主要依賴進口。
進口的三維激光掃描儀雖然性能優良,但是其動輒上百萬的昂貴價格限制了其廣泛應用,并且在某些精度要求較低的應用中顯得性能過剩。為此,國內外一些學者開始試圖探索開發低成本或專門用途的三維激光掃描儀。Surmann[5]、H?hnel[6]、Morales[7]等采用伺服裝置驅動二維掃描儀俯仰運動實現了三維掃描(原理如圖1(a)所示),成功用于機器人避障防撞及地形測量。Oliver[8]同樣利用伺服電機驅動使二維掃描儀繞其掃描線中線滾動實現三維掃描(原理如圖1(b)所示),可以快速、高密度地獲取前方感興趣區域的信息。Paulo[9]利用步進電機與二維掃描儀成功開發了一款可用于三維重建的低成本三維激光掃描儀。Julian等[10]在二維掃描儀上加裝旋轉反射鏡,實現了用于室內機器人導航的三維掃描。逄永濤[11]用二維位移臺和激光測距儀構建了一個自由曲面三維激光掃描儀,可用于小型物體的逆向工程。本文將二維激光掃描儀側倒安置在電控轉臺上并結合高精度角度編碼器實現了對場景的360°三維掃描(原理如圖1(c)所示)。

圖1 二維激光掃描儀實現三維掃描的方案
一、三維掃描測量原理
實現三維掃描的一種常用方案是利用標準二維掃描儀加一個機械執行機構,執行機構可以是步進電機或伺服電機,甚至是更加直接可用的精密電控轉臺。二維激光掃描儀和執行機構結合時,掃描平面和旋轉軸的不同安排會導致不同的掃描視場及點云分布,其共同點是繞某個軸旋轉會導致靠近該軸的區域點云密度高。由于該密度分布可能集中在非感興趣區域或導致測量性能無法被充分利用,因而應根據實際需要來確定掃描方式。本文所要設計的是一款室內外均可用的大視場中距離三維激光掃描儀,因此采用如圖1(c)所示的組合方式。
本文所用二維激光掃描儀基于時間飛行法原理進行測距,其內部由一個激光發射器發射激光,激光經由分光器分成兩路:一路由反射鏡反射到被測目標表面;另一路直接進入接收器觸發計時器開始計時。而后返回激光被光電接收器接收,計時器停止計時,由該段發射到接收的時間差及光速可以獲得激光測距原點(反射鏡旋轉中心)到目標表面的距離;掃描儀內部的反射棱鏡不斷勻速旋轉,使得激光以一個固定角度增量不斷偏轉,從而可以得到一系列距離值和角度值,即一條掃描儀線。在此基礎上,要實現三維掃描,只需將二維掃描儀側倒垂直安裝在一個旋轉平臺上。二維掃描儀的測量結果是一個距離值和一個垂直角,要得到三維點坐標還需要一個水平角,即轉臺轉過的角度。為此,本文給電控轉臺加裝一個增量式角度編碼器來測量轉臺轉過的角度。所用SICK二維掃描儀可直接與該編碼器連接,得到對應每條掃描線轉臺的位置和速度。以二維掃描儀光學中心為原點,反射鏡旋轉軸為Y軸,二維掃描中線為X軸,Z軸垂直于XOY平面向上,建立如圖2所示的坐標系。
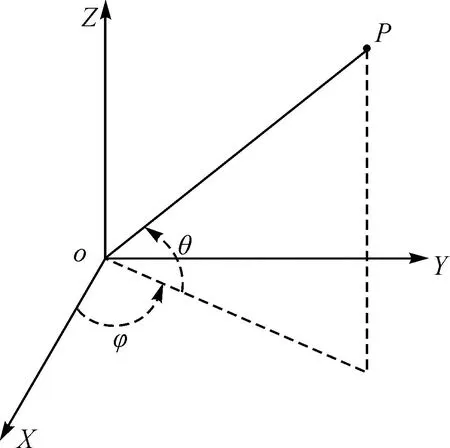
圖2 三維掃描坐標系
據此可得到目標點的三維坐標
(1)
二、掃描儀的設計與實現
1. 硬件系統設計
所設計的低成本三維激光掃描儀硬件系統主要由測距模塊、測角模塊、掃描驅動模塊、運動控制模塊及電源模塊組成,分別對應二維激光掃描儀、角度編碼器、高精度電控轉臺、運動控制器和交直流轉換開關電源。
設計目標為:垂直分辨率最高可達0.166 7°,水平分辨率0.01°~1°可調,掃描視場范圍為150°×360°,測量范圍為1~60 m,單次完整掃描有效點數大于150萬,點云數據中包含目標表面反射回來的強度值,并且具有多次回波功能。
(1) 硬件選型
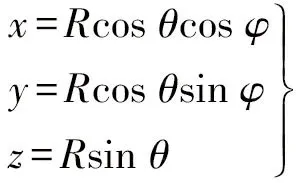
二維激光掃描儀選用SICK公司的LMS511-20100Pro,能夠在提供較遠測量距離的同時保證較高的測量精度。LMS511系列是SICK公司新推出的高性能室外型二維激光掃描儀,主要用于室外的物體測量及防撞,而其中的LMS511-20100采用小光點的激光,能夠較準確地測量物體的尺寸及距離,主要用于測量精度要求較高的應用場合。表1為其主要技術參數[12]。
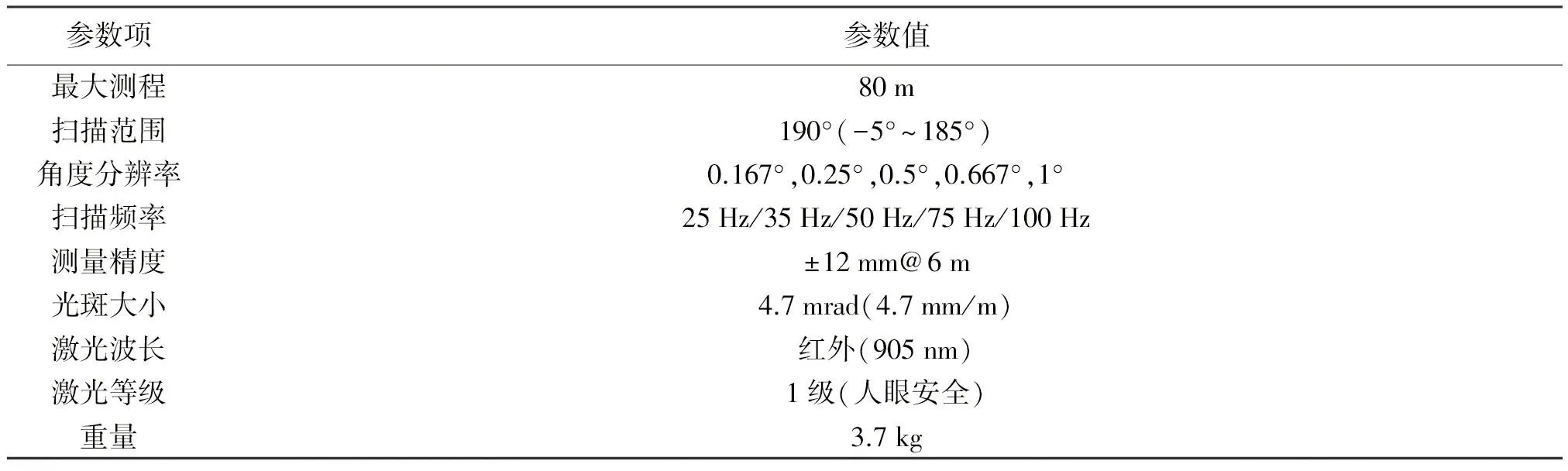
表1 二維激光掃描儀主要技術參數
角度編碼器選用SICK公司新一代高分辨率的增量型旋轉編碼器DFS60,分辨率高達65 536(即0.005 5°),且可通過標準的輸出線纜或插頭自由設定分辨率。考慮到與轉臺的連接,選用夾緊法蘭型結構的該型編碼器,其軸徑尺寸為10 mm×19 mm;同時為方便與二維激光掃描儀輸入端的連接,編碼器的出線方式采用電纜出線式。
電控轉臺選用武漢華天科遠公司的MRSA100,其由步進電機驅動,采用精密蝸輪蝸桿傳動和轉軸系設計,調整精度高、空回小,可以任意正向和反向旋轉。步進電機和蝸桿通過進口高品質彈性聯軸節連接,傳動同步,消偏性能好,排除空回和形位誤差。轉臺中心通孔與旋轉中心嚴格同軸度要求,中心孔徑嚴格配合公差限制,方便精密定位運動。該轉臺經細分后分辨率可達0.000 156°,重復定位精度小于0.005°,最大中心承載50 kg。通過RS232接口,配合SC系列運動控制器可對其實現自動化控制。
運動控制器采用與上述轉臺配套定制的精密運動控制箱,其采用USB通信端口,即插即用,利用G代碼編程,便于開發。
SICK二維激光掃描儀LMS511-20100Pro和角度編碼器DFS60的工作電壓均為24 V DC±20%,故在室內時采用220 V交流轉直流開關電源來供電,在室外時采用24 V蓄電池供電。
(2) 硬件連接
角度編碼器通過安裝法蘭從底面與轉臺連接固定,通過輸出線纜將其輸出的AB兩相分別與二維激光掃描儀輸入端的IN3和IN4兩線相連(如圖3所示);通過專用編程工具設置編碼器的輸出信號為HTL。二維激光掃描儀通過一個承載連接件采用螺栓結構與轉臺固連在一起,使掃描儀光學中心位于轉臺旋轉軸上。轉臺通過RS232與運動控制箱連接,運動控制箱通過USB端口與筆記本連接,二維激光掃描儀通過以太網端口與筆記本連接,由開關電源同時給二維激光掃描儀和角度編碼器供電。系統實物如圖4所示。
圖3 角度編碼器接線圖
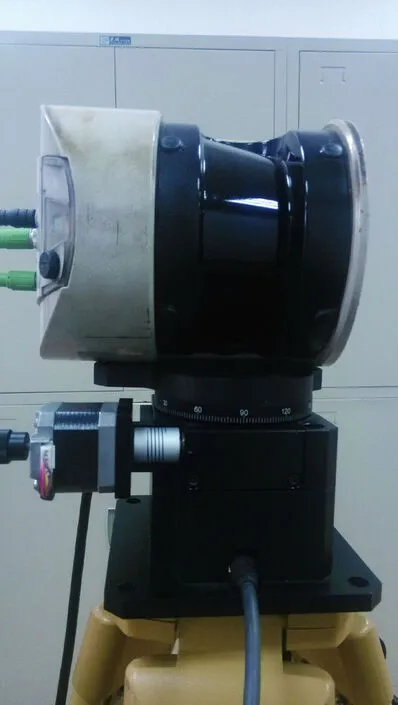
圖4 系統實物
2. 軟件系統設計
二維掃描儀通過以太網與上位機通信,利用MFC封裝的CSocket類編程實現設備連接、參數設置、指令發送和數據接收;利用廠家提供的SkytAX控件編程實現對轉臺的控制。數據獲取部分需要完成的功能主要有掃描儀連接、掃描參數設置、數據接收解算及保存等,軟件設計流程如圖5所示。

圖5 數據采集流程
每一幀掃描數據中只包含一個轉臺位置即掃描儀水平轉過的角度,該角度是在二維掃描過程中185°時進行采樣的,因而對應每個二維掃描角度時刻的水平旋轉角度需要內插得到(線掃描過程視為勻速運動),根據距離、水平和垂直角度即可得到笛卡爾坐標。
為了保證掃描過程中的軟件界面交互,提高數據解算效率,采用多線程技術,設置好二維激光掃描儀與轉臺的參數后,開啟數據接收線程,等待掃描數據。當掃描儀獲取的數據超過一定大小時,數據會分包發送,因此需要根據數據幀結構來判斷是否接收到一幀完整數據,是則開啟工作線程進行數據解碼和坐標解算,否則將該次數據保存在緩存中,等待組包解算。當判斷水平轉過的角度到達所設置的掃描范圍時,發送命令停止掃描,并將數據存入文件中。
三、試驗分析
1. 定性分析
為測試所設計三維激光掃描儀的性能,對實驗室進行了掃描。掃描時垂直和水平分辨率均設為1/6°,轉臺速度為4.167°,進行了360°掃描,掃描時間為87.4 s,經去噪[13]后共獲得1 525 438個有效點。圖6為室內場景掃描局部圖,從圖中可以清晰地看到室內擺放的物品;圖7為按灰度顯示的360°掃描結果,可以看到掃描起止位置無錯位現象,整體掃描效果較好。

圖6 室內場景三維掃描局部圖
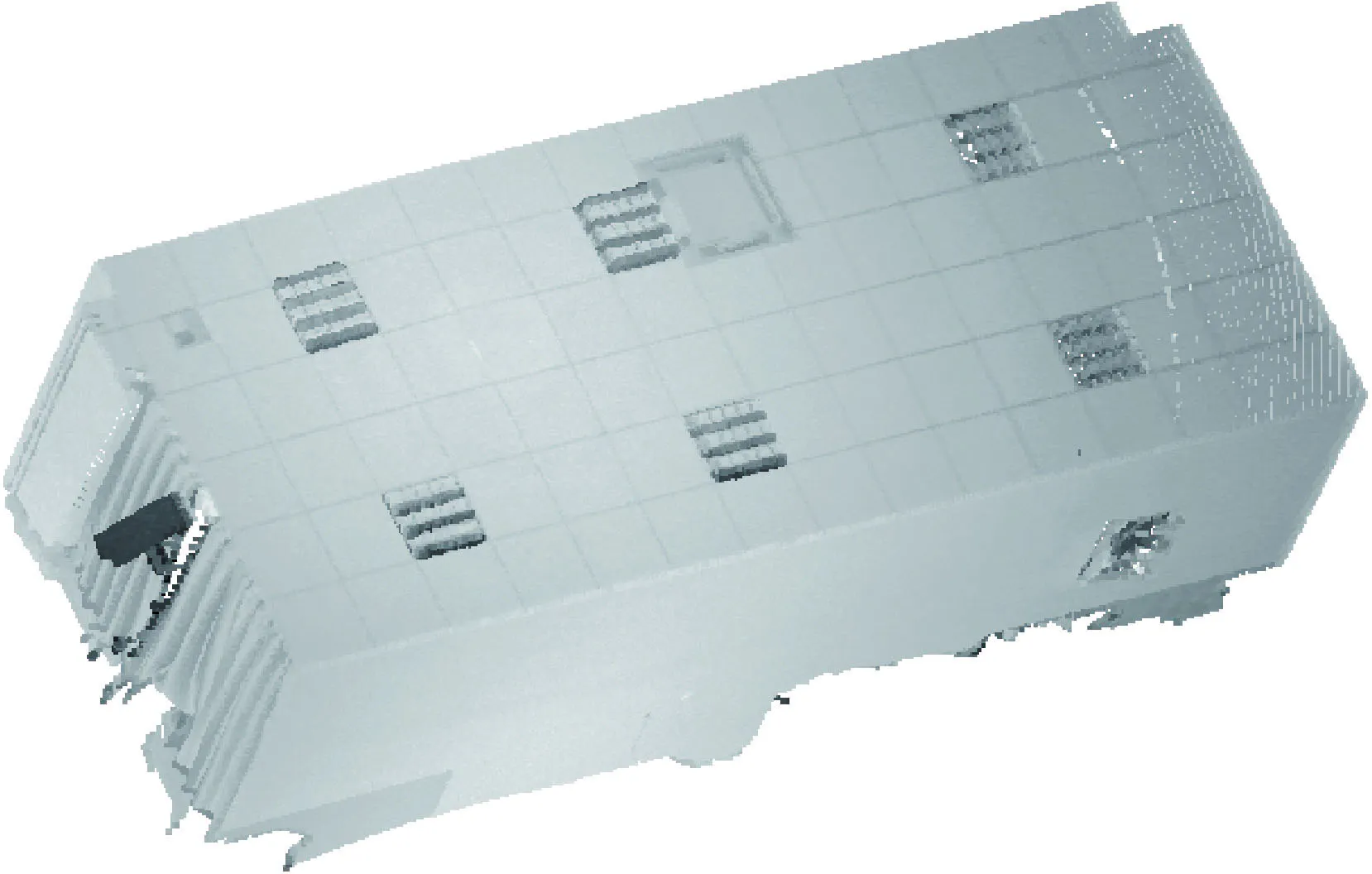
圖7 按灰度顯示的360°掃描結果
對所獲取的點云數據進行平面特征識別,采用生長算法,選取種子點根據生長條件向鄰域點傳遞直到平面邊界,該方法能有效識別和區分點云數據中不同的平面,效果如圖8所示。
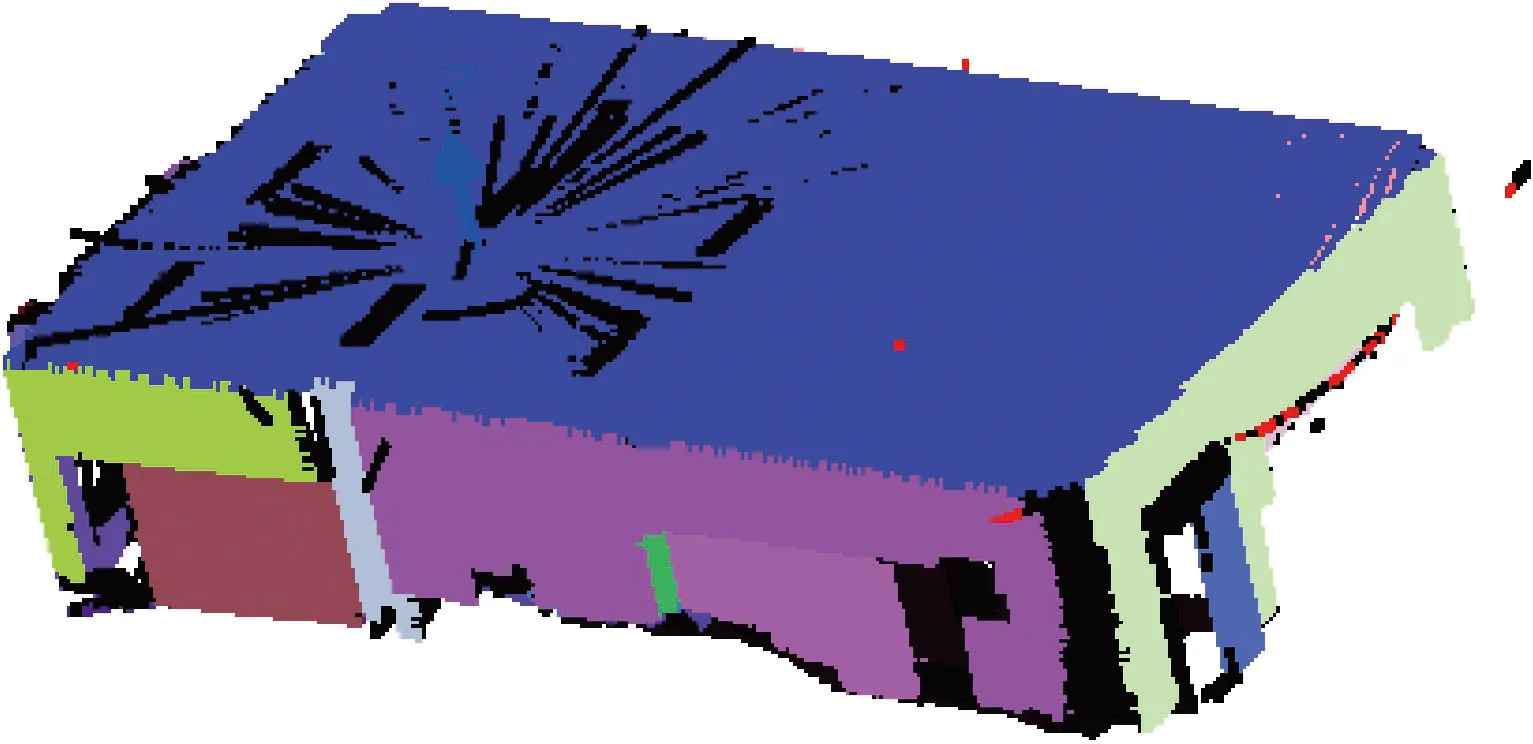
圖8 平面識別效果
2. 定量分析
為了檢驗所獲取的點云數據的質量,選取掃描點云中墻面上一塊區域(共5578個點)進行最小二乘平面擬合,并將下式作為平面度評價指標,即
(2)
式中,ax+by+cz+d=0為擬合得到的平面方程;(xi,yi,zi)為包含n個點的點集中第i個點的坐標,求得平面度為±3.6 mm,最大偏差為7 mm,考慮到二維激光掃描儀厘米級的測距精度,所得點云數據質量較好。
球形靶標是三維激光掃描中常用的人工標志[14],其中心坐標可作為同名點進行多站點云數據的拼接及儀器精度的測試[15]。空間中布設5個FARO球形標志(半徑為72.5 mm),與所設計三維激光掃描儀距離約4 m,水平和垂直分辨率均設為1/6°,進行掃描后提取球面點云,利用RANSAC方法進行球面擬合得到5個球形標志的中心坐標;在相同距離處架設FARO Focus3D X130三維激光掃描儀(25 m處測距精度2 mm),掃描并提取球形標志中心坐標作為基準,將本文所設計低成本掃描儀測得的標志中心坐標轉換到該基準坐標系下,計算與基準值的各坐標分量差值Δxi、Δyi、Δzi,用如下公式評價點位精度,即

(3)
求得的點位精度為±2.75 mm,因而所設計的三維激光掃描儀測得的點云數據能以較高精度識別球形標志,可用于進一步的點云數據拼接及性能測試。
四、結束語
三維激光掃描是當前三維空間信息獲取中最先進的技術之一,三維激光掃描儀正向著小型化、專業化的方向發展。本文基于二維激光掃描儀設計了一款低成本三維激光掃描儀,介紹了其基本原理及軟硬件設計,并通過定性和定量試驗證明所得點云數據質量較好。為獲得更精確的點云數據,下一步需要對測距結果和系統內參數進行標定。
[1] 馬立廣.地面三維激光掃描儀的分類與應用[J].地理空間信息,2005,3(3):60-62.
[2] 李杰, 周興華, 唐秋華, 等. 三維激光掃描技術在數字城市中的應用[J]. 海岸工程, 2011, 30(3): 28-33.
[3] 張序, 李兆堃, 羅小華, 等. 應用三維激光掃描測量進行文物逆向工程恢復[J]. 測繪科學, 2013, 38(6): 169-171.
[4] 彭維吉, 李孝雁, 黃颯. 基于地面三維激光掃描技術的快速地形圖測繪[J].測繪通報, 2013 (3): 70-72.
[5] SURMANN H, LINGEMANN K, NüCHTER A, et al. A 3D Laser Range Finder for Autonomous Mobile Robots[C]∥Proceedings of the 32nd ISR (International Symposium on Robotics). [S.l.]:ISR,2001.
[7] MORALES J, MARTINEZ J L, MANDOW A, et al. Boresight Calibration of Construction Misalignments for 3D Scanners Built with a 2D Laser Rangefinder Rotating on Its Optical Center[J]. SENSORS, 2014; 14 (11): 20025.
[8] WULF O, WAGNER B. Fast 3D Scanning Methods for Laser Measurement Systems[C]∥International Conference on Control Systems and Computer Science (CSCS14). [S.l.]:CSCS,2003: 2-5.
[9] DIAS P, MATOS M, SANTOS V. 3D Reconstruction of Real World Scenes Using a Low-cost 3D Range Scanner[J]. Computer-aided Civil and Infrastructure Engineering, 2006, 21(7): 486-497.
[10] RYDE J, HU H. 3D Laser Range Scanner with Hemispherical Field of View for Robot Navigation[C]∥IEEE/ASME International Conference on Advanced Intelligent Mechatronics. [S.l.]:IEEE, 2008: 891-896.
[11] 逄永濤, 張愛武. 自由曲面三維激光測量系統設計與開發[J]. 系統仿真學報, 2008, 20(9): 341-343.
[12] SICK A G. Data Sheet: Laser Measurement Sensors of the LMS5xx Product Family[EB/OL].[2013-03-15]. www.sick.com.
[13] 李廣云, 李明磊, 王力, 等. 地面激光掃描點云數據預處理綜述[J].測繪通報,2015(11) : 1-3.
[14] 姚吉利, 馬寧, 賈象陽,等. 球形標靶的固定式掃描大點云自動定向方法[J].測繪學報, 2015, 44(4):431-437.
[15] 王瑞鵬, 王力, 李廣云, 等. 基于球形靶標的三維激光掃描儀加乘常數測定方法[J].測繪通報, 2014 (S2): 133-134.
Design and Implement of Low-cost 3D Laser Scanner
ZONG Wenpeng,LI Guangyun,WANG Li
2016-01-13 基金項目: 國家自然科學基金(41274014;41501491);現代城市測繪國家測繪地理信息局重點實驗室開放基金(20141201WY)
宗文鵬(1990—),男,碩士生,研究方向為多傳感器組合測量系統與應用。E-mail: la9881275@163.com
宗文鵬,李廣云,王力.低成本三維激光掃描儀的設計與實現[J].測繪通報,2016(11):31-34.
10.13474/j.cnki.11-2246.2016.0359.
P24
B
0494-0911(2016)11-0031-04
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
