精密星歷解算POS輔助下ADS80相機在1∶500測圖中的應用
2016-12-20 10:00:36桑奪坤王青山
測繪通報 2016年11期
關鍵詞:測量
于 澎,桑奪坤,王青山
(1. 遼寧省地理信息院,遼寧 沈陽 110034; 2. 徠卡測量系統貿易(北京)有限公司,湖北 武漢 430072)
?
徠卡測量新技術應用專欄
精密星歷解算POS輔助下ADS80相機在1∶500測圖中的應用
于 澎1,桑奪坤2,王青山1
(1. 遼寧省地理信息院,遼寧 沈陽 110034; 2. 徠卡測量系統貿易(北京)有限公司,湖北 武漢 430072)
介紹了ADS80推掃式數字航空攝影測量系統在生產過程中,使用精密單點定位技術解算GNSS+IMU數據的精度,同時通過項目試驗驗證了精密單點定位技術解算的GNSS+IMU數據,在后期的空中三角測量平差之后,能夠滿足1∶500地形圖的精度要求,為后續數據生產提供了技術依據。
ADS80相機;精密星歷;POS
ADS80推掃式相機由瑞士徠卡公司生產,是世界先進的航攝系統之一。該系統的定位技術支持地面基站、精密單點定位。隨著衛星定位技術的不斷發展,精密單點定位技術日趨完善。目前該技術已經可以應用于大比例尺航測作業。本文結合實際生產任務,闡述了ADS80航攝儀使用精密單點定位技術制作1∶500大比例尺地形圖測繪應用的可行性。
一、ADS80航攝儀系統介紹
ADS80航攝系統是一款推掃式航空相機,幅寬為12 000像元,具有彩色和全色波段,可同時獲得前視角、下視角、后視角影像。航向具有100%三度重疊,可獲取連續無縫的地面影像。ADS80航攝儀系統集成了高精度的GNSS+IMU設備,可以使用精密單點定位技術進行定位定向,能夠滿足大比例尺測圖規范,為成果的精度提供了有力的保障。其系統參數見表1。
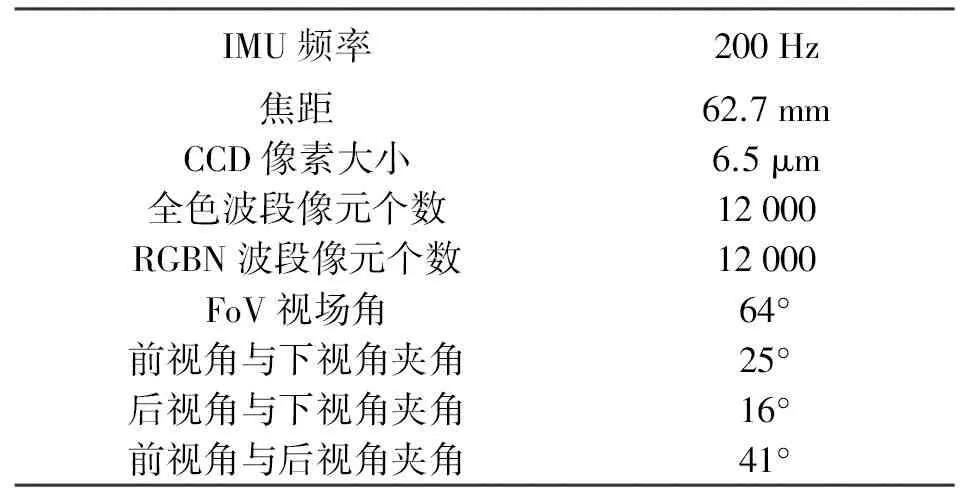
表1 ADS80主要技術參數
二、項目流程
圖1闡述了ADS80航測測圖項目的流程。
三、項目案例
1. 測區概況說明
攝區位于遼寧省北部,松遼平原中段,覆蓋了整個鐵嶺市市區及部分縣區。攝區航攝面積為360 km2,地面分辨率為0.07 m,最高點高度為337 m,最低點高度為60 m。共37條航線,總計飛行3個架次。圖2為本次航空攝影的范圍;圖3為本次航空攝影獲取的高分辨率影像。

圖1 項目流程
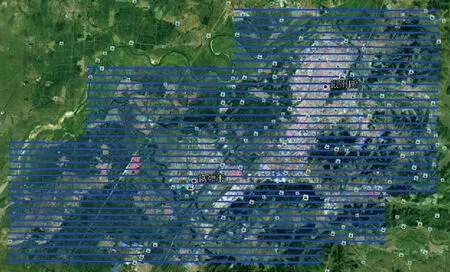
圖2 航空攝影范圍
2. 處理流程
1) 使用Leica Xpro軟件解壓原始數據。
2) 使用IPAS TC軟件,采用精密單點定位技術解算POS數據并檢查POS數據初始精度。
3) 使用Leica Xpro軟件執行預處理、空中三角測量,以及L1影像輸出、DSM輸出與正射影像輸出。
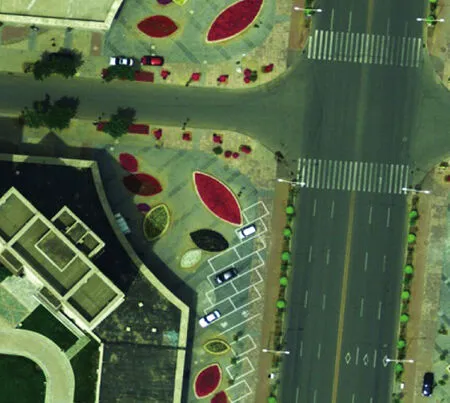
圖3 航攝成果
4) 使用MapMartix軟件,基于L1級影像進行地物采集,編輯DEM、DOM等。
3. 結論及分析
(1) 精密星歷解算GNSS+IMU精度控制
精密星歷解算 GNSS+IMU數據的原理:使用精密星歷進行GNSS數據的事后解算,在解算的同時,使用Kalman濾波算法進行IMU數據的融合。在解算過程中,由于無法對實際的航跡進行真實值的測量,因此軟件使用相對精度進行POS精度的評定。
Position Separation 指標:在GNSS+IMU數據解算時,執行前向和后向雙向解算,計算出2個飛行軌跡,由于起算點的不同,實際解算出的2個軌跡會略有差異,由于GNSS+IMU的高精度,這種差異不應太大。Position Separation參數代表2個軌跡之間的差值,本次使用的3個架次數據,Position Separation指標的數值都在5 cm以內,滿足徠卡所要求的初始POS精度。最終的飛行軌跡使用前向和后向軌跡的融合軌跡。
(2) 空中三角測量精度控制
航攝加密區內均勻布設了25個定向點和8個檢查點。空中三角測量加密報告分析見表2。

表2 空中三角測量精度統計 m
空中三角測量成果滿足國家《數字航空攝影測量空中三角測量規范》(GB/T 23236—2009)中1∶500定向點平面位置中誤差0.13 m、高程0.11 m,檢查點平面位置中誤差0.175 m、高程0.15 m,模型連接點平面中誤差0.175 m、高程0.15 m的規范要求[2]。
(3) 立體測圖精度檢查
將糾正后的L1級影像導入航天遠景MapMatrix,量測檢查點,對比檢查點實測值與立體測圖測量值的殘差X、Y、Z。其精度見表3。
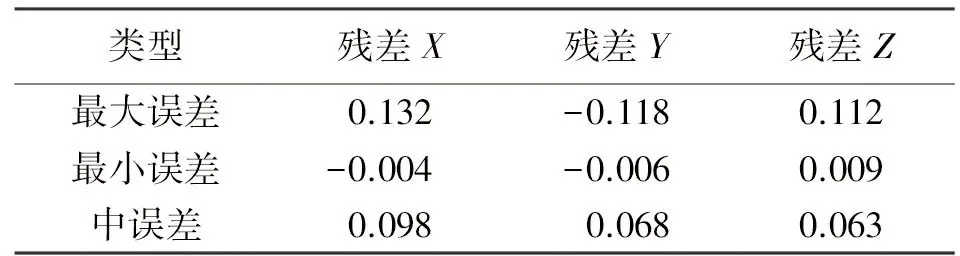
表3 MapMatrix中檢查點精度統計 m
四、結束語
通過精密單點定位技術解算ADS80相機的GNSS+IMU數據,在初始POS精度滿足徠卡公司要求指標的前提下,通過控制點進行了空中三角測量,通過立體測圖軟件對檢查點進行了評測,其平面中誤差、高程中誤差均滿足1∶500成圖規范要求,從而驗證了精密星歷解算的初始POS可應用于1∶500大比例尺測圖。

(本專欄由徠卡測量系統和本刊編輯部共同主辦)
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
