圖像制導(dǎo)導(dǎo)彈操控手柄特性優(yōu)化設(shè)計(jì)及驗(yàn)證技術(shù)*
2016-12-20 01:33:06趙軍民楊云剛段辰璐
彈箭與制導(dǎo)學(xué)報(bào) 2016年3期
關(guān)鍵詞:指令
趙軍民,楊云剛,段辰璐,牛 冰
(中國(guó)兵器工業(yè)第203研究所,西安 710065)
?
圖像制導(dǎo)導(dǎo)彈操控手柄特性優(yōu)化設(shè)計(jì)及驗(yàn)證技術(shù)*
趙軍民,楊云剛,段辰璐,牛 冰
(中國(guó)兵器工業(yè)第203研究所,西安 710065)
為了有效提高射手操控圖像制導(dǎo)導(dǎo)彈穩(wěn)定跟蹤目標(biāo)的能力,對(duì)某型圖像制導(dǎo)導(dǎo)彈操控手柄特性進(jìn)行分析研究,在不改變手柄硬件關(guān)系的情況下,對(duì)其輸入輸出特性進(jìn)行優(yōu)化設(shè)計(jì)。通過(guò)構(gòu)建虛擬樣機(jī)系統(tǒng),對(duì)設(shè)計(jì)的操控手柄特性進(jìn)行試驗(yàn)驗(yàn)證,確定了一種相對(duì)最優(yōu)的操控手柄輸入輸出特性,提高了射手操控導(dǎo)彈的能力及導(dǎo)彈系統(tǒng)的作戰(zhàn)效能。
圖像制導(dǎo)導(dǎo)彈;手柄;特性
0 引言
圖像制導(dǎo)導(dǎo)彈如采用“人在回路”的制導(dǎo)方式,戰(zhàn)斗模式從單一的“發(fā)射后不管”發(fā)展到“發(fā)射并全程操控”[1],可以有效解決目標(biāo)的識(shí)別、跟蹤及攻擊點(diǎn)選擇問(wèn)題,對(duì)敵實(shí)施精確打擊。射手和導(dǎo)彈系統(tǒng)的合理配合是提高導(dǎo)彈系統(tǒng)作戰(zhàn)效能的關(guān)鍵因素之一,導(dǎo)彈的操控手柄作為重要的人機(jī)結(jié)合面,除了反應(yīng)自身手柄特性外,同時(shí)將射手的動(dòng)態(tài)特性引入導(dǎo)彈跟蹤制導(dǎo)回路[2-3],其性能對(duì)于整個(gè)導(dǎo)彈系統(tǒng)至關(guān)重要[4]。
1 操控手柄特性分析
在圖像制導(dǎo)導(dǎo)彈末制導(dǎo)飛行段,射手根據(jù)操控監(jiān)視器上顯示的目標(biāo)及背景圖像,操縱操控手柄使跟蹤器的“+”字瞄準(zhǔn)目標(biāo)中心,跟蹤器輸出的跟蹤指令通過(guò)數(shù)據(jù)鏈上傳到彈上,彈上接收后送給導(dǎo)引頭跟蹤回路控制導(dǎo)引頭光軸瞄準(zhǔn)目標(biāo),導(dǎo)引頭產(chǎn)生視線角速度,由彈上計(jì)算機(jī)按比例導(dǎo)引律形成指令控制導(dǎo)彈飛行,直至命中目標(biāo)。
射手操控手柄輸入輸出特性可以根據(jù)需求進(jìn)行定制,不僅研制成本較高,同時(shí)不利于后期操控特性的優(yōu)化設(shè)計(jì),一般手柄輸入力F與輸出電壓V固有關(guān)系為線性關(guān)系V=k×F,k為比例系數(shù),典型操控手柄如圖1所示。在導(dǎo)彈系統(tǒng)中,操控采集手柄輸出電壓,經(jīng)跟蹤器編碼對(duì)應(yīng)導(dǎo)引頭像素偏差,像素偏差的變化又決定了導(dǎo)引頭輸出視線角速度。在不改變手柄硬件關(guān)系的情況下,對(duì)手柄特性進(jìn)行A/D信號(hào)處理,在地面操控或跟蹤器上加上優(yōu)化算法,可以實(shí)現(xiàn)

圖1 操控手柄圖
期望的操控手柄輸入輸出特性,由于處理后的數(shù)字電壓信號(hào)與導(dǎo)引頭像素的對(duì)應(yīng)關(guān)系并沒(méi)改變,只是改變了手柄用力與電壓的力敏特性。圖2為操控手柄信號(hào)傳輸示意圖,虛線框中為原手柄力敏特性,實(shí)線框中為優(yōu)化后的手柄力敏特性。
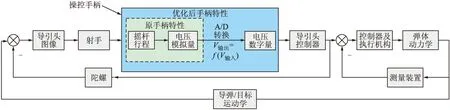
圖2 操控手柄信號(hào)傳輸示意圖
2 操控手柄特性優(yōu)化設(shè)計(jì)
圖像制導(dǎo)導(dǎo)彈系統(tǒng)射手在末制導(dǎo)段通過(guò)操控手柄控制導(dǎo)彈飛行時(shí)屬于誤差補(bǔ)償控制[5],人體用力在一定范圍內(nèi)容易控制,但當(dāng)用力越大時(shí),手抖動(dòng)的誤差越大,對(duì)應(yīng)的跟蹤誤差也越大。通過(guò)改善操控手柄斜率,達(dá)到改善導(dǎo)彈末段射手的操控性能。以下采用三段法、三角函數(shù)法、指數(shù)法三種數(shù)學(xué)方法實(shí)現(xiàn)操控手柄輸入輸出斜率的變化,對(duì)其進(jìn)行分析研究,其他數(shù)學(xué)方法不再贅述。
三段法采用兩種固定的斜率,在手柄輸入力較小時(shí),輸出電壓信號(hào)斜率為k1,手柄輸入力較大時(shí),輸出電壓信號(hào)斜率為k2,輸入輸出數(shù)學(xué)關(guān)系如式(1)所示,V輸入為操控采集手柄電壓(輸入電壓),V輸出為改善后的輸出電壓,V1為斜率變化時(shí)對(duì)應(yīng)的輸入電壓,三段法手柄特性曲線如圖3粉色虛線所示。
(1)
三角函數(shù)法采用變斜率的方法,實(shí)現(xiàn)手柄輸入力與輸出電壓斜率的變化,同時(shí)引入手柄力敏特性參數(shù),輸入輸出數(shù)學(xué)關(guān)系如式(2)所示,F為手柄輸入力,Fmax為手柄最大輸入力,Vmax為手柄最大輸入力對(duì)應(yīng)的電壓,k為手柄力敏特性系數(shù),n為手柄靈敏度指數(shù)。根據(jù)操控手柄固有特性,同時(shí)對(duì)手柄輸入力F做歸一化處理見(jiàn)式(3)。將式(2)代入式(3)得到三角函數(shù)法優(yōu)化后手柄特性輸入輸出數(shù)學(xué)關(guān)系式(4),手柄特性曲線如圖3紅色點(diǎn)劃線所示。
(2)
指數(shù)法采用變斜率的方法,實(shí)現(xiàn)手柄輸入力與輸出電壓斜率的變化,k1、k2為設(shè)計(jì)的斜率參數(shù),輸入輸出數(shù)學(xué)關(guān)系如式(5)所示,三角函數(shù)法手柄特性曲線如圖3藍(lán)色虛線所示。
(5)
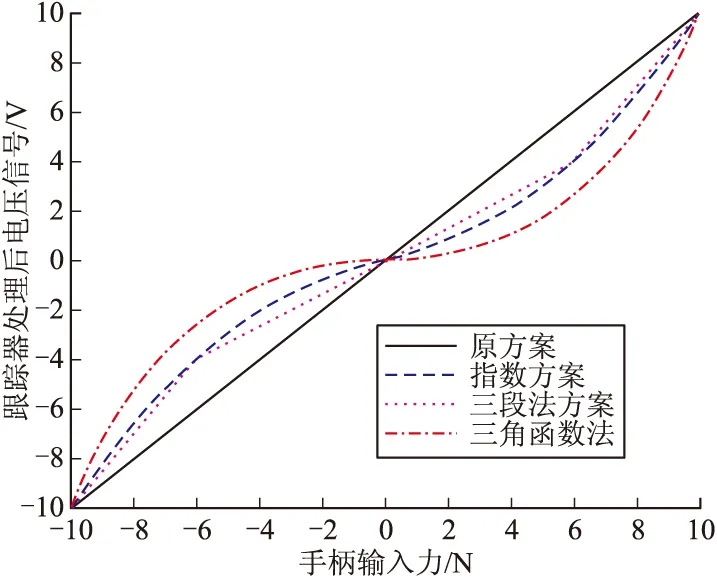
圖3 操控手柄特性曲線
3 試驗(yàn)驗(yàn)證
3.1 構(gòu)建試驗(yàn)系統(tǒng)
在仿真實(shí)驗(yàn)室內(nèi)構(gòu)建圖像制導(dǎo)導(dǎo)彈系統(tǒng)虛擬樣機(jī)[6-7],該虛擬樣機(jī)系統(tǒng)由彈道仿真計(jì)算機(jī)、圖像導(dǎo)引頭場(chǎng)景虛擬樣機(jī)、導(dǎo)引頭穩(wěn)定與跟蹤系統(tǒng)虛擬樣機(jī)、戰(zhàn)場(chǎng)環(huán)境虛擬樣機(jī)、網(wǎng)絡(luò)設(shè)備、操控裝置等幾部分組成,虛擬樣機(jī)系統(tǒng)工作原理如圖4所示。在該虛擬樣機(jī)系統(tǒng)完成目標(biāo)的跟蹤試驗(yàn),通過(guò)分析導(dǎo)彈跟蹤指令、脫靶量及導(dǎo)彈落角,驗(yàn)證射手操控手柄特性優(yōu)化效果,確定操控手柄特性及最優(yōu)控制參數(shù)。
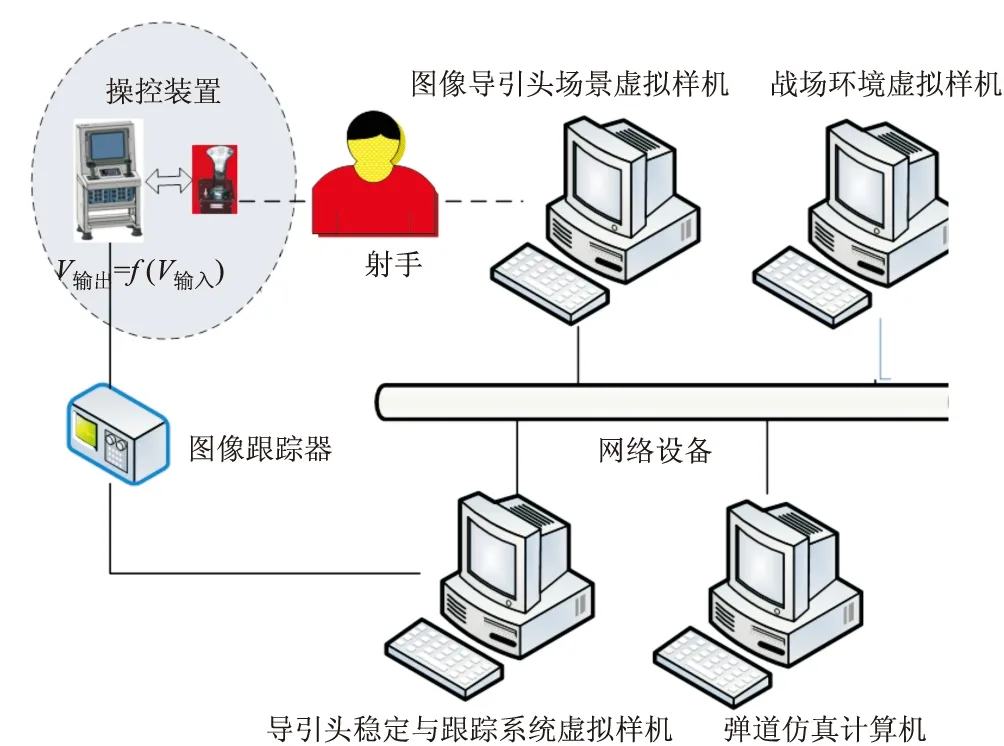
圖4 圖像制導(dǎo)導(dǎo)彈系統(tǒng)虛擬樣機(jī)
3.2 操控手柄特性驗(yàn)證
設(shè)置直升飛機(jī)在斜距7 km、高度100 m、以30 m/s速度橫向運(yùn)動(dòng),通過(guò)蒙特卡洛法隨機(jī)生成50組導(dǎo)彈飛行過(guò)程中誤差及擾動(dòng)數(shù)據(jù)加入彈道仿真計(jì)算機(jī)。分別采用三段法、三角函數(shù)法、指數(shù)法對(duì)操控手柄特性進(jìn)行改善,分析射手通過(guò)操控手柄控制導(dǎo)彈跟蹤直升機(jī)的能力,統(tǒng)計(jì)結(jié)果見(jiàn)表1。圖5~圖7為各選取的三組俯仰方向視線角速度與跟蹤指令對(duì)比(偏航方向與俯仰方向相似,文中不在贅述),黑線為跟蹤指令,綠線為俯仰視線角速度。
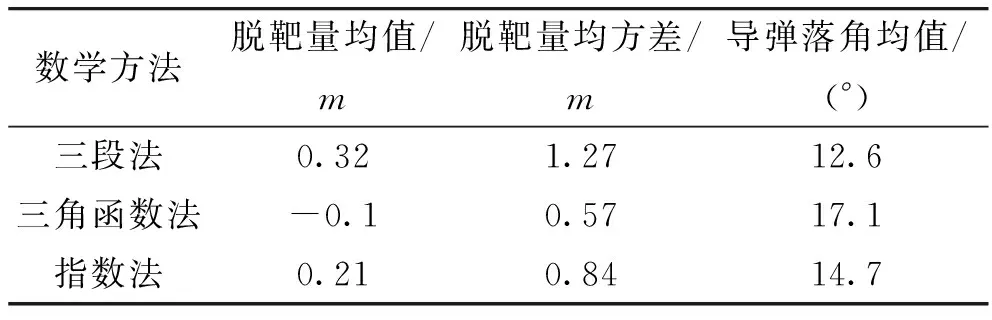
表1 目標(biāo)命中結(jié)果統(tǒng)計(jì)
圖5 三段法跟蹤指令與視線角速度對(duì)比
圖6 三角函數(shù)法跟蹤指令與視線角速度對(duì)比
圖7 指數(shù)法跟蹤指令與視線角速度對(duì)比
結(jié)果表明,彈目距離較遠(yuǎn)時(shí),三種方法優(yōu)化后的跟蹤系統(tǒng),目標(biāo)視線角速度變化較小,射手手柄控制力較小,跟蹤指令無(wú)明顯區(qū)別;隨著彈目距離變小,目標(biāo)視線角速度變化變大,射手手柄控制力變大,三角函數(shù)法比三段法、指數(shù)法增加了末段目標(biāo)跟蹤阻尼特性,射手末段跟蹤指令更加平穩(wěn),導(dǎo)彈姿態(tài)穩(wěn)定。經(jīng)過(guò)統(tǒng)計(jì)三角函數(shù)法的仿真脫靶量最小,導(dǎo)彈落角最大,操控特性改善效果比三段法、指數(shù)法更優(yōu)。
3.3 手柄特性參數(shù)優(yōu)化
經(jīng)過(guò)虛擬樣機(jī)系統(tǒng)驗(yàn)證,采用三角函數(shù)法優(yōu)化的操控手柄特性最有利于圖像制導(dǎo)導(dǎo)彈射手操控導(dǎo)彈跟蹤目標(biāo)。根據(jù)操控手柄固有特性取k≈1,Fmax=10N,Vmax=10V,選擇合適的靈敏度指數(shù)n,也可以改善手柄的操作特性。表2為三角函數(shù)法優(yōu)化后手柄靈敏度對(duì)照表,圖8為手柄靈敏度對(duì)應(yīng)的操控手柄特性曲線。射手施力在一定范圍(2~6N)容易控制。根據(jù)半實(shí)物仿真試驗(yàn)結(jié)果,穩(wěn)定跟蹤情況下導(dǎo)彈飛行末段跟蹤指令在4°/s以內(nèi),為改善手柄的操縱性,使人的施力范圍覆蓋末段跟蹤特性,即從4N手柄輸入力對(duì)應(yīng)的4°/s跟蹤指令,擴(kuò)展為6N手柄輸入力對(duì)應(yīng)的4°/s跟蹤指令,通過(guò)表2對(duì)照分析,對(duì)于該圖像制導(dǎo)導(dǎo)彈系統(tǒng)選取靈敏度指數(shù)n=1.2~1.3時(shí),最有利于射手穩(wěn)定跟蹤目標(biāo)。

表2 手柄靈敏度對(duì)照表
圖8 靈敏度對(duì)應(yīng)的操控手柄特性曲線
4 結(jié)論
文中通過(guò)分析某型圖像制導(dǎo)導(dǎo)彈射手操控手柄特性,在不改變手柄硬件關(guān)系的情況下,對(duì)其輸入輸出特性進(jìn)行優(yōu)化設(shè)計(jì),設(shè)計(jì)了多種手柄特性曲線,通過(guò)構(gòu)建圖像制導(dǎo)導(dǎo)彈虛擬樣機(jī)系統(tǒng),對(duì)設(shè)計(jì)的操控手柄特性進(jìn)行試驗(yàn)驗(yàn)證,確定了一種相對(duì)最優(yōu)的手柄輸入輸出特性,有效的提高了射手操控導(dǎo)彈的能力及導(dǎo)彈系統(tǒng)的作戰(zhàn)效能。該方法也可應(yīng)用在同類(lèi)導(dǎo)彈操控手柄優(yōu)化設(shè)計(jì)過(guò)程中。
[1] 何亞娟. 圖像制導(dǎo)導(dǎo)彈火控系統(tǒng)設(shè)計(jì) [J]. 火力與指揮控制, 2014, 39(9): 160-163.
[2] 趙軍民, 胡國(guó)懷, 段辰璐, 等. “人在回路”圖像制導(dǎo)導(dǎo)彈射手建模技術(shù)研究 [J]. 彈箭與制導(dǎo)學(xué)報(bào), 2012, 32(4): 74-76.
[3] 劉興堂, 趙紅言, 雷虎民. 飛行員數(shù)學(xué)模型與新機(jī)飛行品質(zhì)預(yù)測(cè) [J]. 飛行力學(xué), 1997, 15(1): 30-36.
[4] 薛瀛, 姚振強(qiáng), 張沖, 等. 基于人機(jī)工效的民機(jī)駕駛盤(pán)機(jī)構(gòu)設(shè)計(jì)研究 [J]. 機(jī)械科學(xué)與技術(shù), 2015, 34(8): 1308-1312.
[5] 萬(wàn)春熙. 反坦克導(dǎo)彈設(shè)計(jì)原理 [M]. 北京: 國(guó)防工業(yè)出版社, 1981: 95-110.
[6] 何亞娟. 人在回路中的末制導(dǎo)系統(tǒng)性能測(cè)試與評(píng)估 [J]. 彈箭與制導(dǎo)學(xué)報(bào), 2012, 32(2): 29-31.
[7] 費(fèi)錦東, 劉鵬. 凝視紅外成像末制導(dǎo)系統(tǒng)應(yīng)用研究 [J]. 紅外與激光工程, 2006, 35(3): 253-257.
Optimization Design and Verification of Characteristic of Image-guided Missile Control Handle
ZHAO Junmin,YANG Yungang,DUAN Chenlu,NIU Bing
(No.203 Research Institute of China Ordanance Industries, Xi’an 710065, China)
In order to improve shooter’s capability of controlling image-guided missile tracking target stably, the characteristic of an image-guided missile control handle was analyzed and researched, the in-out characteristic was optimally designed without changing hardware relationship of the handle. The virtual prototype system was constructed to verify the optimized characteristic of control handle, an optimal in-out characteristic was developed which can improve the shooter’s capability of controlling missile and effectiveness of weapon system.
image-guided missile; handle; characteristic
2015-11-06
趙軍民(1980-),男,陜西合陽(yáng)人,高級(jí)工程師,碩士,研究方向:導(dǎo)彈系統(tǒng)總體設(shè)計(jì)及性能分析。
TJ765.3
A
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
時(shí)代農(nóng)機(jī)(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學(xué)院學(xué)報(bào)(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車(chē)零部件(2014年2期)2014-03-11 17:46:27
