半捷聯(lián)成像導(dǎo)引頭視線轉(zhuǎn)率的幾何提取算法*
2016-12-20 01:33:05敖志偉丁海山李亦君趙桂瑾
彈箭與制導(dǎo)學(xué)報(bào) 2016年3期
敖志偉,丁海山,李亦君,趙桂瑾,2
(1 中國(guó)空空導(dǎo)彈研究院,河南洛陽(yáng) 471009;2 航空制導(dǎo)武器航空科技重點(diǎn)實(shí)驗(yàn)室,河南洛陽(yáng) 471009)
?
半捷聯(lián)成像導(dǎo)引頭視線轉(zhuǎn)率的幾何提取算法*
敖志偉1,丁海山1,李亦君1,趙桂瑾1,2
(1 中國(guó)空空導(dǎo)彈研究院,河南洛陽(yáng) 471009;2 航空制導(dǎo)武器航空科技重點(diǎn)實(shí)驗(yàn)室,河南洛陽(yáng) 471009)
由于滾仰式半捷聯(lián)導(dǎo)引頭的特殊性,無(wú)法直接測(cè)量得到制導(dǎo)系統(tǒng)所需的視線轉(zhuǎn)率,因此文中提出一種新的視線轉(zhuǎn)率的幾何提取算法。通過(guò)坐標(biāo)變換獲取視線在慣性空間中的角位置,利用剛體定點(diǎn)轉(zhuǎn)動(dòng)理論在慣性空間中直接解算視線轉(zhuǎn)率。用反正切形式跟蹤微分器求取框架角速度,避免了直接微分帶來(lái)的噪聲放大效應(yīng),提高了視線轉(zhuǎn)率的精度。數(shù)值仿真驗(yàn)證了文中所提算法的有效性。
視線轉(zhuǎn)率;半捷聯(lián);跟蹤微分器
0 引言
半捷聯(lián)成像導(dǎo)引頭技術(shù)逐漸成為導(dǎo)引頭小型化以及降低成本的重要發(fā)展方向[1-2]。慣性視線轉(zhuǎn)率是導(dǎo)引頭最重要的輸出信息,利用視線轉(zhuǎn)率通過(guò)適當(dāng)?shù)膶?dǎo)引方法可以形成導(dǎo)彈制導(dǎo)指令。由于半捷聯(lián)成像導(dǎo)引頭實(shí)質(zhì)上采用的是數(shù)字穩(wěn)定平臺(tái),其結(jié)構(gòu)形式和工作方式與傳統(tǒng)的陀螺穩(wěn)定平臺(tái)有本質(zhì)區(qū)別,無(wú)法直接提取視線轉(zhuǎn)率。
文中提出了一種慣性視線轉(zhuǎn)率的幾何提取算法。利用半捷聯(lián)成像導(dǎo)引頭提供的可測(cè)信息,通過(guò)坐標(biāo)變換獲得視線在慣性空間中的角位置,根據(jù)剛體定點(diǎn)轉(zhuǎn)動(dòng)理論直接在慣性空間中解算視線轉(zhuǎn)率。該算法設(shè)計(jì)原理簡(jiǎn)單,易于實(shí)現(xiàn),具有一定的工程參考價(jià)值。
1 算法分析
以俯仰滾轉(zhuǎn)兩軸半捷聯(lián)成像導(dǎo)引頭為對(duì)象進(jìn)行分析。框架示意圖如圖1所示。框架上的角傳感器可以測(cè)出框架轉(zhuǎn)角,探測(cè)成像系統(tǒng)可以測(cè)出視線相對(duì)穩(wěn)定平臺(tái)的空間位置。
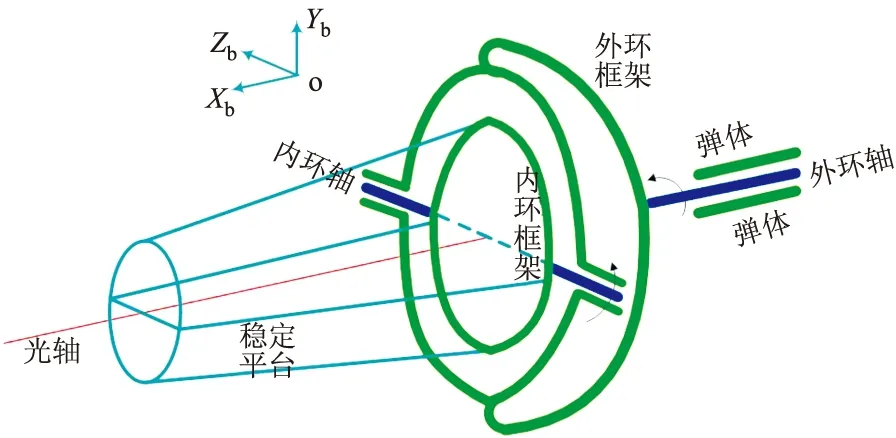
圖1 滾仰半捷聯(lián)位標(biāo)器框架示意圖
1.1 視線相對(duì)慣性系的空間指向
位標(biāo)器可以測(cè)出視線相對(duì)穩(wěn)定平臺(tái)的空間位置,位標(biāo)器框架角反映了穩(wěn)定平臺(tái)相對(duì)彈體的姿態(tài),彈體姿態(tài)角反映了彈體相對(duì)慣性系的空間角位置。綜合這些可測(cè)信息就可以確定視線相對(duì)慣性系的空間指向。

慣性系先繞Y軸轉(zhuǎn)α角,然后繞Z軸轉(zhuǎn)β角,最后繞X軸轉(zhuǎn)τ角就和彈體系重合。
內(nèi)、外框架的運(yùn)動(dòng)可以抽象為內(nèi)環(huán)系以外環(huán)系Z軸為定軸的定軸轉(zhuǎn)動(dòng)和外環(huán)系以彈體系X軸為定軸的定軸轉(zhuǎn)動(dòng)。彈體系繞X軸轉(zhuǎn)γs角就和外環(huán)系重合,外環(huán)系繞Z軸轉(zhuǎn)θs角就和內(nèi)環(huán)系重合。
各坐標(biāo)系之間的變換關(guān)系如圖2所示。

圖2 各坐標(biāo)系之間的變換關(guān)系

(1)
另一方面有:
(2)
上面兩式聯(lián)立解得:
(3)
1.2 視線相對(duì)慣性系的角運(yùn)動(dòng)


(4)
(5)
由式(5)就可以直接在慣性空間中解算半捷聯(lián)導(dǎo)引頭視線轉(zhuǎn)率。
2 基于跟蹤微分器的算法實(shí)現(xiàn)
當(dāng)缺少角速度傳感器時(shí),應(yīng)用式(5)計(jì)算需要首先求出角度的微分信號(hào)。文獻(xiàn)[7]中提出了一種適于工程應(yīng)用的跟蹤微分器。該微分器采用反正切形式的加速度函數(shù),兼顧跟蹤快速性與過(guò)渡過(guò)程平穩(wěn)性,并且具有很好的濾波效果,可以給出連續(xù)平滑的跟蹤信號(hào)和微分信號(hào)。設(shè)輸入信號(hào)為v(t),則設(shè)計(jì)如下跟蹤微分器[7]:
(6)
其中:R,a1>0,a2>0,f1>0,f2>0是可調(diào)的參數(shù)。當(dāng)參數(shù)選取合適時(shí),x2(t)可以作為輸入信號(hào)v(t)的近似微分。其離散形式為:
(7)
式中:δt為采樣時(shí)間。k=1,2,…。
3 數(shù)值仿真
3.1 仿真模型
由于視線相對(duì)慣性系的角運(yùn)動(dòng)可以抽象為視線系以慣性系原點(diǎn)O為固定點(diǎn)的定點(diǎn)轉(zhuǎn)動(dòng)。因此視線系相對(duì)慣性系的位置可以由3個(gè)歐拉角確定。這里引入一組新的歐拉角{γ,φ,η},這樣慣性系先繞X軸轉(zhuǎn)γ角,然后繞Y軸轉(zhuǎn)φ角,最后繞X軸轉(zhuǎn)η角就和視線系重合。
同前面的分析,利用新引入的歐拉角,視線相對(duì)慣性系運(yùn)動(dòng)形成的角速度中垂直于視線的分量在慣性系中的投影為:
(8)
仿真中設(shè)定視線相對(duì)慣性系轉(zhuǎn)動(dòng)的運(yùn)動(dòng)學(xué)方程為:
(9)
式中:ω1、ω2、ω3、γ0、φ0和η0為某常值。
設(shè)定彈體相對(duì)慣性系轉(zhuǎn)動(dòng)的運(yùn)動(dòng)學(xué)方程為:
(10)
式中:ω4、ω5、ω6、α0、β0和τ0為某常值。
設(shè)定穩(wěn)定平臺(tái)相對(duì)彈體系轉(zhuǎn)動(dòng)的運(yùn)動(dòng)學(xué)方程為:
(11)
式中:ω7、ω8、γs0和θs0為某常值。
在目標(biāo)處于導(dǎo)引頭視場(chǎng)內(nèi)的前提下利用式(8)和式(9)構(gòu)造理論視線轉(zhuǎn)率;通過(guò)式(10)、式(11)分別構(gòu)造彈體運(yùn)動(dòng)、位標(biāo)器框架運(yùn)動(dòng),并由彈目空間幾何關(guān)系解算出視線在內(nèi)環(huán)系中的方位角和高低角;再根據(jù)式(3)解算出視線相對(duì)慣性系的角位置;最后將式(5)解算的結(jié)果和構(gòu)造的理論視線轉(zhuǎn)率進(jìn)行比較。仿真中彈體姿態(tài)角引入幅值0.02°的高斯白噪聲,位標(biāo)器框架角引入幅值0.012°的高斯白噪聲,視線在內(nèi)環(huán)系中的方位角和高低角引入幅值1個(gè)像素的高斯白噪聲。跟蹤微分器的參數(shù)取為R=18,a1=5,a2=4,f1=1,f2=2。
3.2 仿真結(jié)果
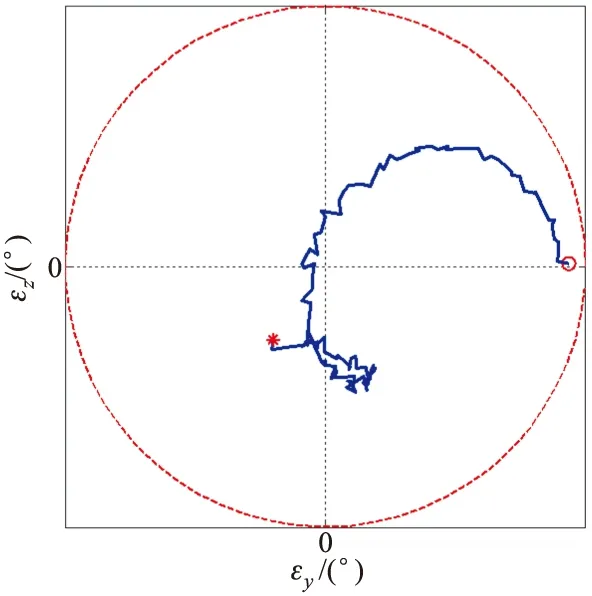
圖3 目標(biāo)像在視場(chǎng)中的運(yùn)動(dòng)軌跡
仿真時(shí)間設(shè)為1 s,采樣時(shí)間間隔為0.01 s。取ω1=300°/s,ω2=-2°/s,ω3=-20°/s,ω4=-1°/s,ω5=-30°/s,ω6=300°/s,ω7=-302°/s,ω8=31°/s,φ0=1.4°,γ0=η0=0,α0=β0=τ0=0,γs0=θs0=0。這種情形表示視線相對(duì)于慣性系的一般運(yùn)動(dòng),彈體姿態(tài)在3個(gè)方向上都有運(yùn)動(dòng),位標(biāo)器框架也相應(yīng)運(yùn)動(dòng)以抵消彈體姿態(tài)運(yùn)動(dòng)使目標(biāo)維持在視場(chǎng)內(nèi)。圖3給出了目標(biāo)像在視場(chǎng)中的運(yùn)動(dòng)軌跡,圖中紅色圓圈表示軌跡起點(diǎn),紅色星號(hào)表示軌跡終點(diǎn)。圖4給出了視線轉(zhuǎn)率在慣性系中的投影,其中紅色實(shí)線表示理論值,黑色虛線是采用文中算法得到的結(jié)果,藍(lán)色點(diǎn)劃線是直接差分得到角度微分后再用式(5)計(jì)算的結(jié)果。從仿真結(jié)果看,同樣的噪聲條件下,用文中提出的算法解算出的視線轉(zhuǎn)率比數(shù)值微分的方法有更高的精度。
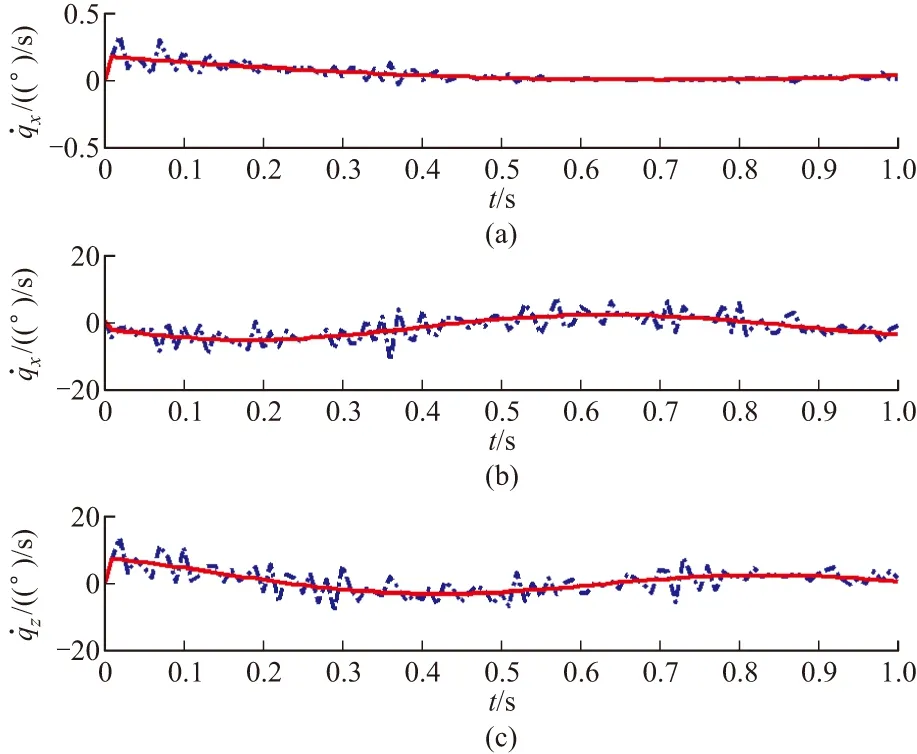
圖4 視線轉(zhuǎn)率在慣性系中的投影
4 結(jié)論
對(duì)于半捷聯(lián)成像導(dǎo)引頭視線轉(zhuǎn)率難以提取的問(wèn)題,文中提出了一種幾何提取算法。根據(jù)視線的空間位置,通過(guò)坐標(biāo)變換獲得視線在慣性空間中的角位置,直接在慣性空間中解算視線轉(zhuǎn)率。用反正切形式跟蹤微分器代替直接微分求取框架角速度,提高了視線轉(zhuǎn)率的重構(gòu)精度。所提算法設(shè)計(jì)簡(jiǎn)單,數(shù)值仿真試驗(yàn)表明了所提算法的有效性,具有一定的工程應(yīng)用參考價(jià)值。
[1] RUDIN R T. Strapdown stabilization for imaging seekers: AIAA, A93-42219 [R]. 1993
[2] 訚勝利, 賈宏光, 張躍, 等. 光學(xué)成像導(dǎo)引頭半捷聯(lián)穩(wěn)定 [J]. 紅外與激光工程, 2011, 40(1): 129-132.
[3] 賈筱媛, 趙超. 半捷聯(lián)穩(wěn)定控制方案與制導(dǎo)信息提取方法 [J]. 紅外與激光工程, 2011, 40(12): 2474-2479.
[4] 楊雅君, 徐勝利, 李曉東, 等. 彈載相控陣?yán)走_(dá)視線重構(gòu)研究 [J]. 彈箭與制導(dǎo)學(xué)報(bào), 2012, 32(5): 39-44.
[5] 王男, 張奕群. 提高視線轉(zhuǎn)率精度的一種改進(jìn)方法 [J]. 現(xiàn)代防御技術(shù), 2007, 35(4): 64-68.
[6] OCHI Y, ITOH K, KANAI K. Application of H-infinity control to missile guidance and control: AIAA 2000-4069 [R]. 2000.
[7] 董小萌, 張平. 反正切形式跟蹤微分器設(shè)計(jì)及相平面分析 [J]. 控制理論與應(yīng)用, 2010, 27(4): 533-537.
A Geometric Algorithm of Line-of-sight Rate Reconstruction for Semi-strapdown Imaging Seeker
AO Zhiwei1,DING Haishan1,LI Yijun1,ZHAO Guijin1,2
(1 China Airborne Missile Academy, Henan Luoyang 471009, China;2 Aviation Key Laboratory of Science and Technology on Airborne Guided Weapons, Henan Luoyang 471009, China)
In view of particularity of semi-strapdown imaging seeker, line-of-sight rate couldn’t be measured directly, so a new algorithm for the line-of-sight rate was provided in this paper. Angular positions of line-of-sight in inertial space were obtained by coordinate transformation. Then the line-of-sight rate was solved directly in the inertial space based on the theory of rigid body turning around a fixed point. Angular rates were obtained by an arctangent-based tracking differentiator, which could avoid noise amplification effect caused by numerical differentiation and improve accuracy of the line-of-sight rate. Numerical simulations show efficiency of the proposed algorithm in this paper.
line-of-sight rate; semi-strapdown; tracking differentiator
2015-06-28
航空科學(xué)基金(20120112006)資助
敖志偉(1980-),男,河南洛陽(yáng)人,工程師,碩士,研究方向:導(dǎo)引頭穩(wěn)定平臺(tái)控制技術(shù)。
TJ765.3
A
