基于激光測距和慣導(dǎo)的非合作目標遠程交會相對導(dǎo)航算法研究
2016-12-20 10:58:58楊東春趙春慧顧冬晴
上海航天 2016年4期
關(guān)鍵詞:卡爾曼濾波
楊東春,趙春慧,顧冬晴
(1.上海航天技術(shù)研究院,上海 201109; 2.上海宇航系統(tǒng)工程研究所,上海 201109)
?
基于激光測距和慣導(dǎo)的非合作目標遠程交會相對導(dǎo)航算法研究
楊東春1,趙春慧2,顧冬晴2
(1.上海航天技術(shù)研究院,上海 201109; 2.上海宇航系統(tǒng)工程研究所,上海 201109)
對非合作目標的遠程交會,研究了一種基于激光測距和慣導(dǎo)的相對導(dǎo)航方法。給出了由激光測距儀和慣性傳感器組成的相對導(dǎo)航系統(tǒng)。設(shè)計了相對導(dǎo)航算法:用激光測距獲得的相對距離和相對方位、俯仰角度與慣導(dǎo)獲得的姿態(tài)和位置信息,確定目標飛行器與追蹤飛行器相對軌道動力學(xué)方程并進行遞推,輸出相對位置與速度;用激光測距輸出的相對距離和相對方位、俯仰角度與慣導(dǎo)獲得的姿態(tài)、位置信息,由卡爾曼濾波得到相對位置與速度的誤差并對遞推結(jié)果進行修正,修正的結(jié)果作為相對導(dǎo)航最終的輸出。算例表明:該相對導(dǎo)航方法適于非合作目標遠程交會,在遠程交會結(jié)束時刻,相對位置誤差小于1 m,相對速度誤差小于0.05 m/s;相對導(dǎo)航濾波器的加速度計常值偏差估計誤差明顯小于絕對導(dǎo)航濾波器。
非合作目標; 遠程交會; 相對導(dǎo)航; 激光測距; 慣導(dǎo); 相對軌道動力學(xué); 相對距離; 相對姿態(tài); 卡爾曼濾波
0 引言
相對導(dǎo)航是空間飛行器交會對接中的關(guān)鍵技術(shù),與非合作目標進行交會時因不能與目標進行通信而無法獲取目標精確的導(dǎo)航定位信息,故非合作目標交會對接中的相對導(dǎo)航更具挑戰(zhàn)性[1]。對自主相對導(dǎo)航已進行了大量研究:文獻[2]解釋了自主交會和對接的各方面,包括交會的不同階段及所需的傳感器,傳感器的配置基于目標飛行器為被動、無動力和非合作的狀態(tài);文獻[3]對遠程導(dǎo)引脈沖變軌方案的有限推力修正進行了研究,可消除轉(zhuǎn)換誤差和攝動模型誤差;文獻[4]給出了差分GPS和激光雷達導(dǎo)航在自主交會的相對接近段(10 km~500 m)和最后逼近段(550~2 m)直至兩飛行器完成交會對接中的應(yīng)用,該法已在ETS-Ⅶ驗衛(wèi)星上已得到了驗證;文獻[5]改進了一種相對導(dǎo)航濾波器用于航天飛機與尾跡屏罩設(shè)備的交會對接,兩個飛行器均配置了GPS接收機,交會時尾跡屏罩設(shè)備將GPS接收機輸出的數(shù)據(jù)傳給航天飛機;文獻[6]闡釋了兩個飛行器處于百米以內(nèi)距離時基于激光測距的相對導(dǎo)航卡爾曼濾波器的優(yōu)勢,由于距離較近對傳感器指向精度的要求不高,且導(dǎo)航算法建立在當?shù)厮疆數(shù)卮怪?LVLH)坐標系中的簡潔線性相對動力學(xué)關(guān)系的基礎(chǔ)上;文獻[7]仿效空間綜合全球定位系統(tǒng)/慣性導(dǎo)航系統(tǒng)(SIGI)卡爾曼濾波器解決了與國際空間站接近的問題,但未對相對導(dǎo)航或電子-視覺傳感器及姿態(tài)指向進行研究;文獻[8]提出了僅利用角度信息進行相對導(dǎo)航的方法,由于追蹤飛行器與目標飛行器相對距離較近(25 m以內(nèi)),目標圖像幾乎充滿了傳感器的整個焦平面,對接時相對姿態(tài)估計顯得尤其重要;文獻[9]探討了一種利用慣性導(dǎo)航系統(tǒng)配合擴展卡爾曼濾波實現(xiàn)相對導(dǎo)航的方法,進行相對位置、速度,相對姿態(tài)和姿態(tài)變化率的估計,適合中等距離的非合作目標交會問題。文獻[10]介紹了基于光學(xué)的相對導(dǎo)航方式,光學(xué)測量方法的測姿精度較高,同時具有相對定位和定姿的功能。激光測距儀可測得相對距離、相對俯仰角和方位角,經(jīng)過濾波得到相對位置、速度誤差,對相對導(dǎo)航中的相對位置與速度進行修正,可獲得相對導(dǎo)航所需的精度。基于激光測距儀和慣性器件測量,本文對非合作目標遠程交會(與目標距離大于數(shù)公里)的相對導(dǎo)航算法進行了研究。
1 非合作目標遠程交會相對導(dǎo)航系統(tǒng)
本文設(shè)計的非合作目標遠程交會相對導(dǎo)航系統(tǒng)如圖1所示。
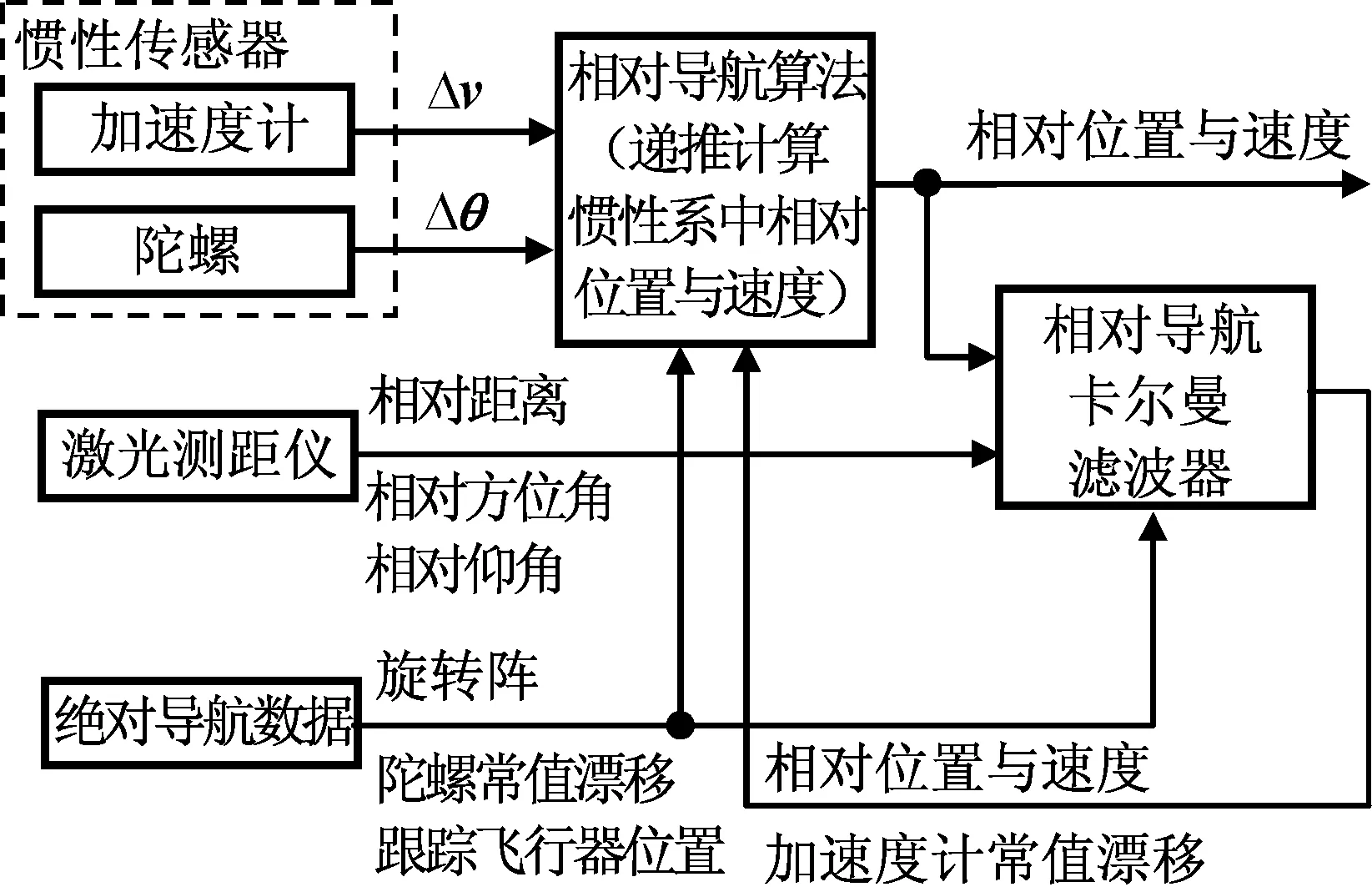
圖1 非合作目標遠程交會相對導(dǎo)航系統(tǒng)Fig.1 Non-coorperative target long-distance rendezvous relative navigation system

2 相對導(dǎo)航算法
對非合作目標遠程相對導(dǎo)航,將i系中的相對位置與速度作為導(dǎo)航參數(shù)。一般合作目標的相對導(dǎo)航的導(dǎo)航參數(shù)為目標軌道系中的相對位置與速度,但計算目標軌道系中的相對位置與速度需獲知較精確的目標飛行器在i系中的位置和速度。對非合作目標來說,雖然目標飛行器在i系中的位置和速度可預(yù)報,但如降低對目標飛行器在i系中的位置和速度預(yù)報精度的要求,可使非合作目標交會的實施更靈活。采用i系中的相對位置與速度作為相對導(dǎo)航參數(shù),則無需對目標飛行器在i系中的位置和速度進行精確預(yù)報,僅確定目標飛行器在i系中的大致位置,使激光測距儀能捕獲目標即可。因絕對導(dǎo)航系統(tǒng)可輸出跟蹤飛行器在慣性系中的位置和速度,若相對導(dǎo)航能輸出i系中的相對位置與速度,則目標飛行器在i系中的位置和速度也能獲得,故亦可得到目標軌道系中的相對位置與速度。
跟蹤飛行器和目標飛行器的軌道動力學(xué)方程分別為
(1)
(2)

定義i系中的相對位置為i系中跟蹤飛行器和目標飛行器位置的差,即

(3)
將式(3)代入式(2)并與(1)相減,可得

(4)
式(4)即為i系中的相對動力學(xué)方程。
在時間區(qū)間[tk-1,tk]中,用捷聯(lián)慣導(dǎo)速度更新的數(shù)值積分方法對式(4)進行積分,可得

(5)


(6)

(7)


(8)
式(5)~(8)即為i系中相對位置和速度遞推計算的算式。
3 相對導(dǎo)航卡爾曼濾波器
定義i系中相對位置和速度的誤差為

(9)

(10)
基于式(4)、(9)、(10),可得相對位置與速度誤差方程為
(11)

(12)
式中:bb為加速度計常值偏差,且

(13)
相對導(dǎo)航的卡爾曼濾波器估計相對位置與速度誤差,以及加速度計常值偏差。用反饋校正,修正計算得到的相對位置與速度,以及加速度輸出的速度增量。相對導(dǎo)航卡爾曼濾波器的狀態(tài)向量
(14)
卡爾曼濾波的系統(tǒng)狀態(tài)方程為

(15)
式中:w為系統(tǒng)狀態(tài)噪聲;F為系統(tǒng)狀態(tài)陣,其具體形式可由式(11)~(13)確定。
(16)
(17)

z=HX+v;
(18)

(19)

(20)
式中:v為由激光測距儀量測噪聲確定的系統(tǒng)量測噪聲;H為量測矩陣;



此處:rix,riy,riz為ri的三軸分量;ρ為相對距離。
獲得系統(tǒng)方程和觀測量后,用卡爾曼濾波基本方程可得系統(tǒng)狀態(tài)的最優(yōu)估計。
4 仿真
由于非合作目標遠程交會相對導(dǎo)航中需使用來自絕對導(dǎo)航系統(tǒng)的數(shù)據(jù),仿真中加入絕對導(dǎo)航系統(tǒng),絕對導(dǎo)航系統(tǒng)為慣性/GPS/天文組合導(dǎo)航系統(tǒng)。仿真中:
a)產(chǎn)生激光測距儀量測時,數(shù)據(jù)更新周期1 s。考慮目標視線方向的方位角和仰角測量誤差為均值0、標準差0.02°的白噪聲;相對距離測量誤差為均值0的白噪聲,其標準差由兩項之和構(gòu)成,一項為固定值5 m,另一項為相對距離的0.000 6倍。
b)產(chǎn)生加速度計量測時,數(shù)據(jù)更新周期0.02 s。考慮加速度計量測誤差由常值偏差、一階高斯馬爾可夫慢變漂移(系統(tǒng)建模時未加入模型,該慢變漂移在仿真中視為不可建模誤差),以及白噪聲(速度隨機游走)構(gòu)成。其中常值偏置誤差1×10-3m/s2;一階高斯馬爾可夫過程相關(guān)時間1 200 s、均方根1×10-4m/s2;白噪聲均值0、(隨機游走系數(shù))標準差5×10-4m/s0.5。
c)產(chǎn)生陀螺量測時,數(shù)據(jù)更新周期0.02 s。考慮陀螺量測誤差由常值偏差、一階高斯馬爾可夫慢變漂移(系統(tǒng)建模時未加入模型,該慢變漂移在仿真中視為不可建模誤差),以及白噪聲(角隨機游走)構(gòu)成。其中常值偏差3.5 (°)/h;一階高斯馬爾可夫過程相關(guān)時間600 s、均方根0.15 (°)/h;白噪聲均值0(隨機游走系數(shù))、標準差0.025 (°)/h0.5。
d)產(chǎn)生星敏感器量測時,數(shù)據(jù)更新周期1 s。考慮星敏感器量測誤差為均值0、標準差7.5″的白噪聲。
e)產(chǎn)生紅外地球敏感器量測時,數(shù)據(jù)更新周期1.5 s。考慮紅外地球敏感器量測誤差由常值偏差、一階高斯馬爾可夫慢變漂移(系統(tǒng)建模時未加入模型,該慢變漂移在仿真中視為不可建模誤差),以及白噪聲構(gòu)成,其中常值偏差為0.05°,一階高斯馬爾可夫過程相關(guān)時間3 600 s、均方根0.005°;白噪聲均值0、標準差0.02°。
f)仿真產(chǎn)生GPS偽距時,數(shù)據(jù)更新周期1 s。考慮偽距量測為均值0、標準差30 m的白噪聲;GPS接收機初始鐘差等效距離誤差10 km,鐘漂等效速度誤差0.1 m/s,且仿真中設(shè)鐘漂等效速度誤差為均值0、標準差0.001 m/s的白噪聲。
設(shè)仿真時間3 h,仿真產(chǎn)生真實運動軌跡時考慮地球非球形攝動的J2,J3,J4項,并加入相關(guān)時間3 600 s,均方根1×10-7m/s2的一階高斯馬爾可夫過程作為擾動加速度項。采用LQR閉環(huán)反饋控制實現(xiàn)遠程交會,遠程交會過程為從距目標50 km處機動至距目標2 km處,遠程交會的單向推力由2臺25 N發(fā)動機(共計50 N)提供。令跟蹤飛行器總質(zhì)量為1.5 t。仿真中,在目標飛行器軌道系中跟蹤飛行器相對目標飛行器的相對位置如圖2所示,相對距離如圖3所示。
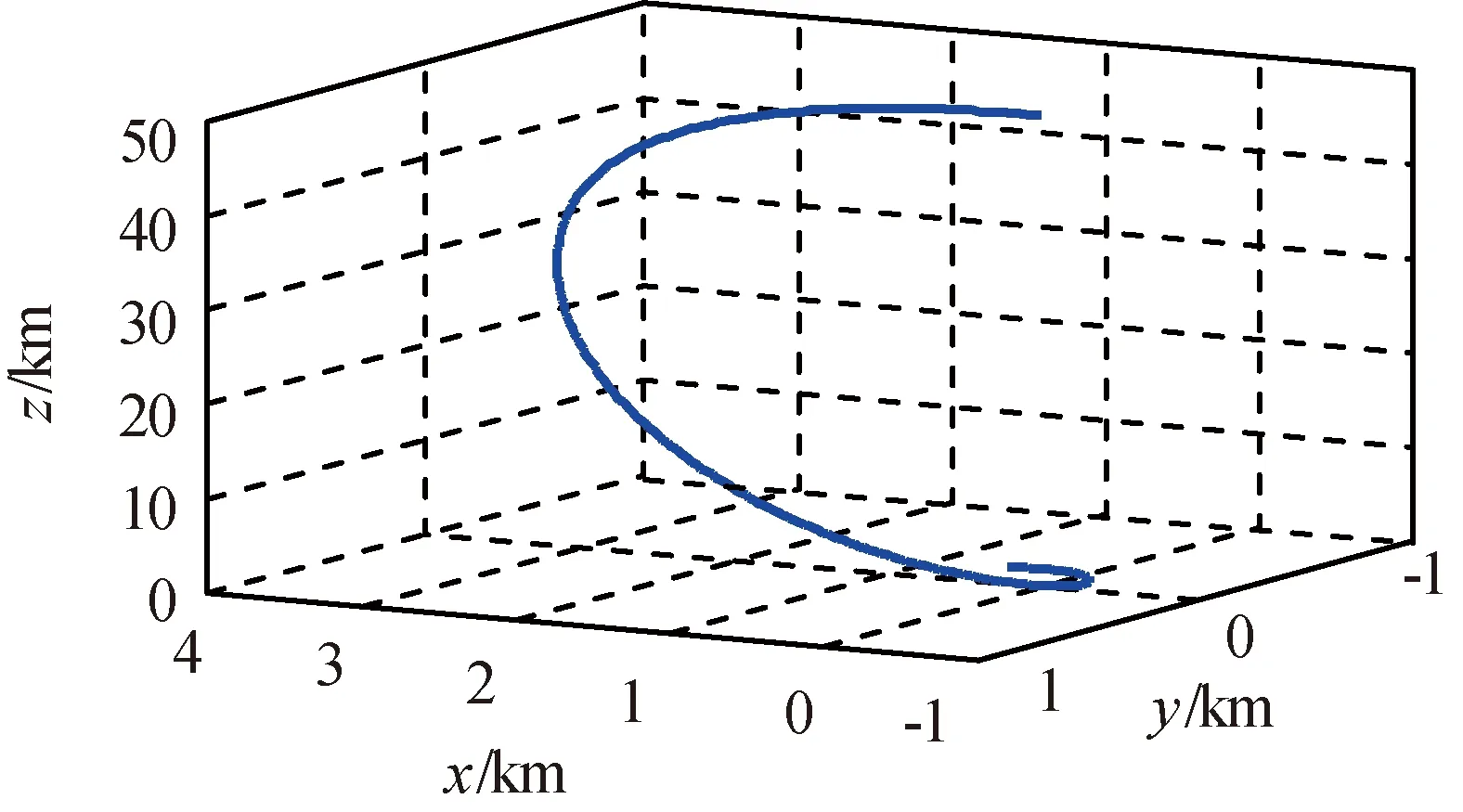
圖2 目標飛行器軌道系中相對位置Fig.2 Relative position in target orbit coordinate
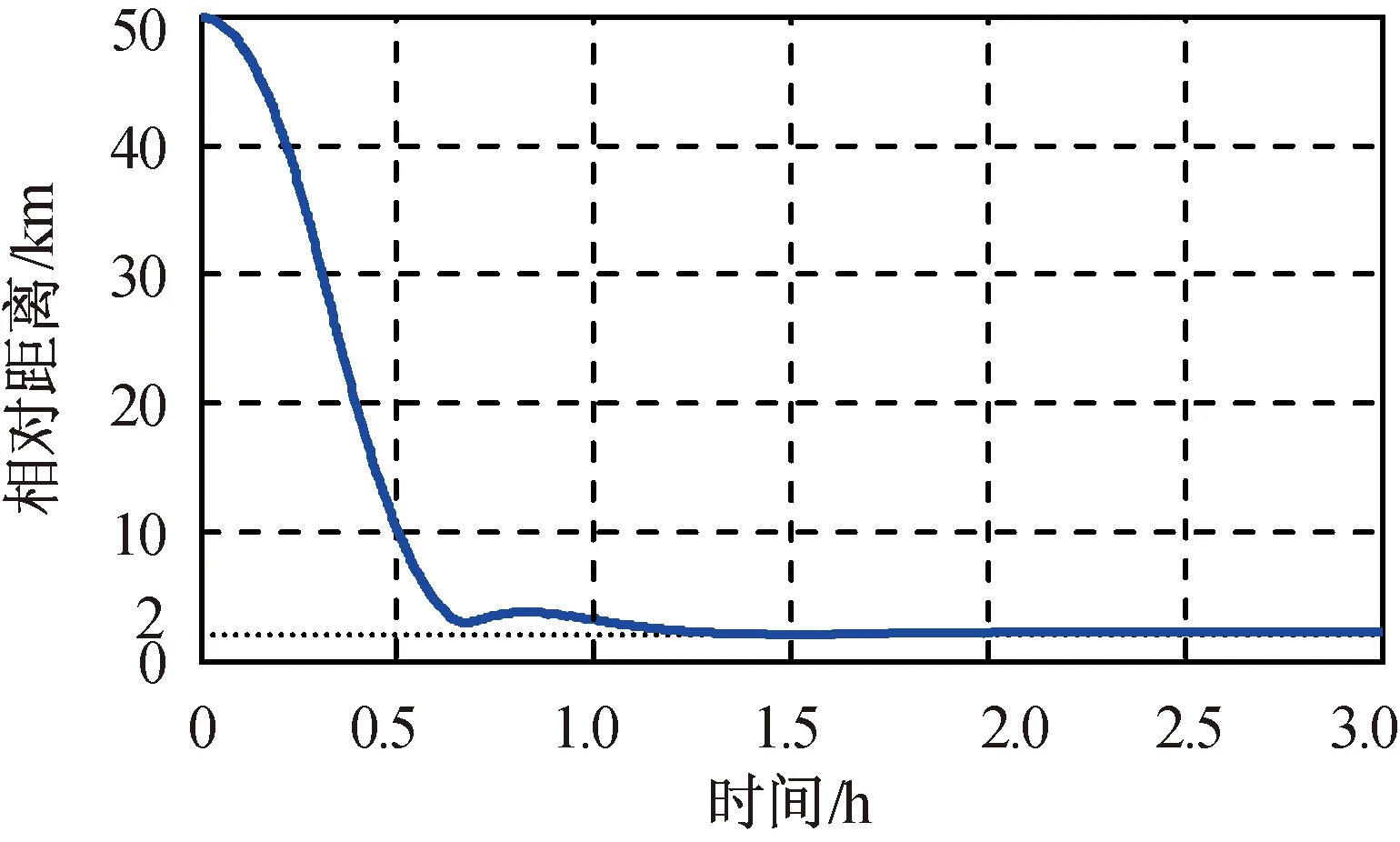
圖3 相對距離Fig.3 Relative distance
仿真中假設(shè)GPS接收機不僅可接收GPS衛(wèi)星發(fā)射的主瓣信號,而且能接收發(fā)射半角28°~35°的旁瓣信號, GPS衛(wèi)星可見性如圖4所示。
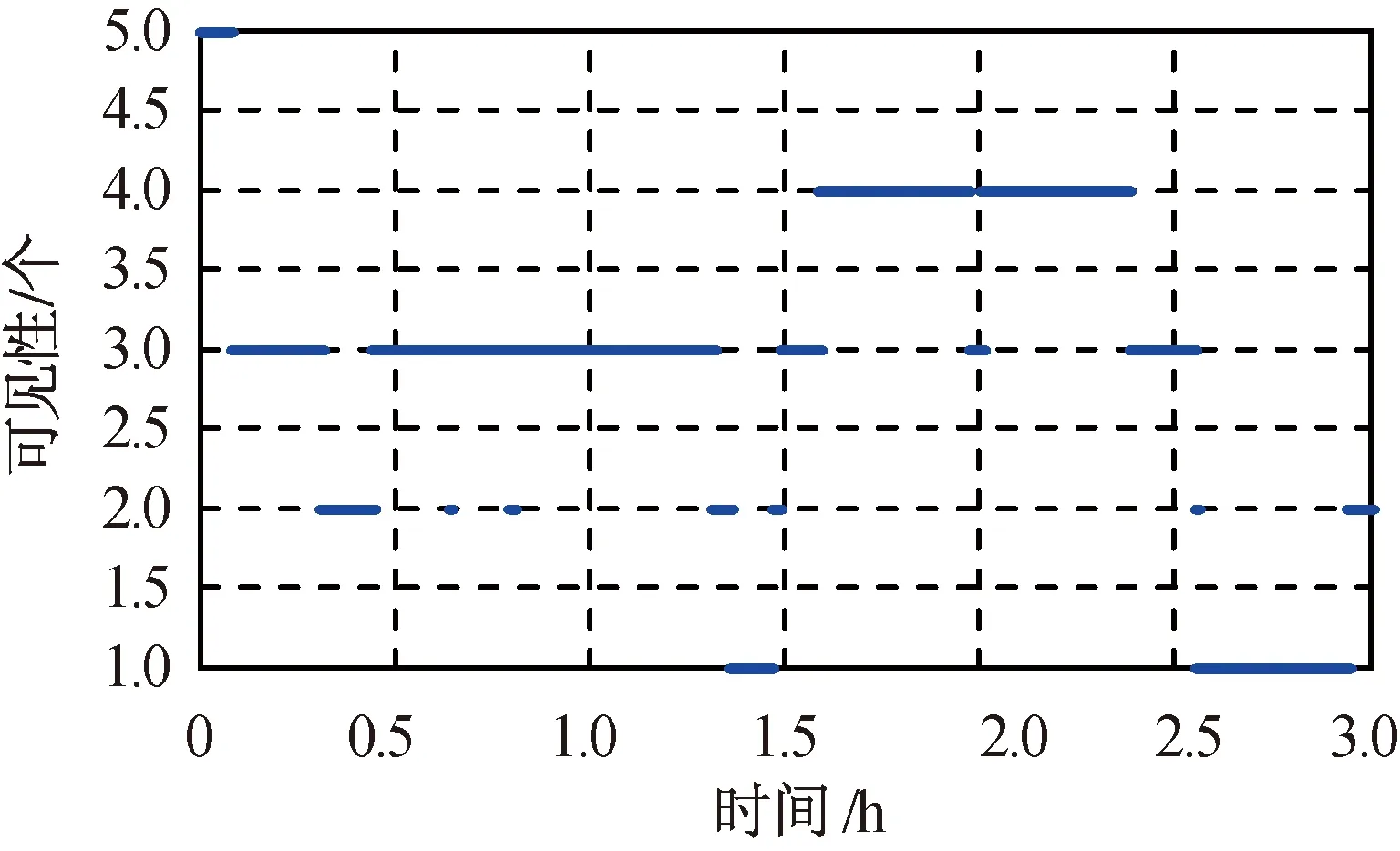
圖4 GPS衛(wèi)星可見性Fig.4 Visible GPS
因遠程交會的軌道控制中,常需使用目標飛行器軌道系中的相對位置和相對速度(如LQR閉環(huán)反饋控制),故將i系中的相對位置和相對速度轉(zhuǎn)為目標飛行器軌道系中的相對位置和相對速度。仿真所得目標飛行器軌道系中的相對位置和相對速度誤差分別如圖5、6所示,相對導(dǎo)航濾波器的加速度計常值偏差估計誤差如圖7所示,絕對導(dǎo)航濾波器的加速度計常值偏差估計誤差如圖8所示。由圖5~8可知:相對導(dǎo)航濾波在0.5 h后收斂,且濾波收斂后相對導(dǎo)航濾波器的加速度計常值偏差估計誤差精度明顯優(yōu)于絕對導(dǎo)航濾波器的加速度計常值偏差估計誤差。在仿真結(jié)束(即遠程交會結(jié)束)時刻,目標飛行器軌道系中的相對位置誤差和相對速度誤差,以及加速度計常值偏差估計誤差見表1。
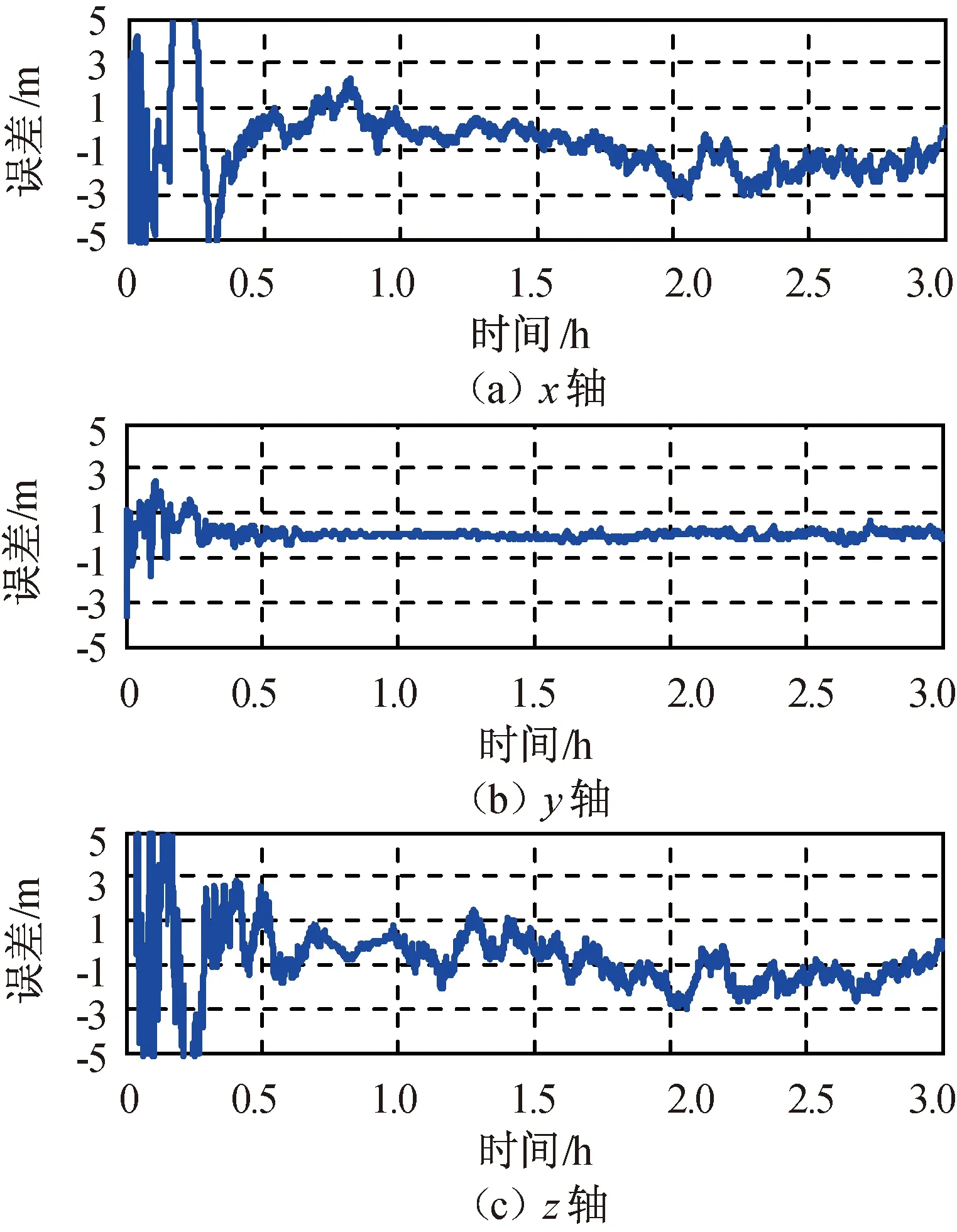
圖5 目標飛行器軌道系中相對位置誤差Fig.5 Relative position error in target orbit coordinate
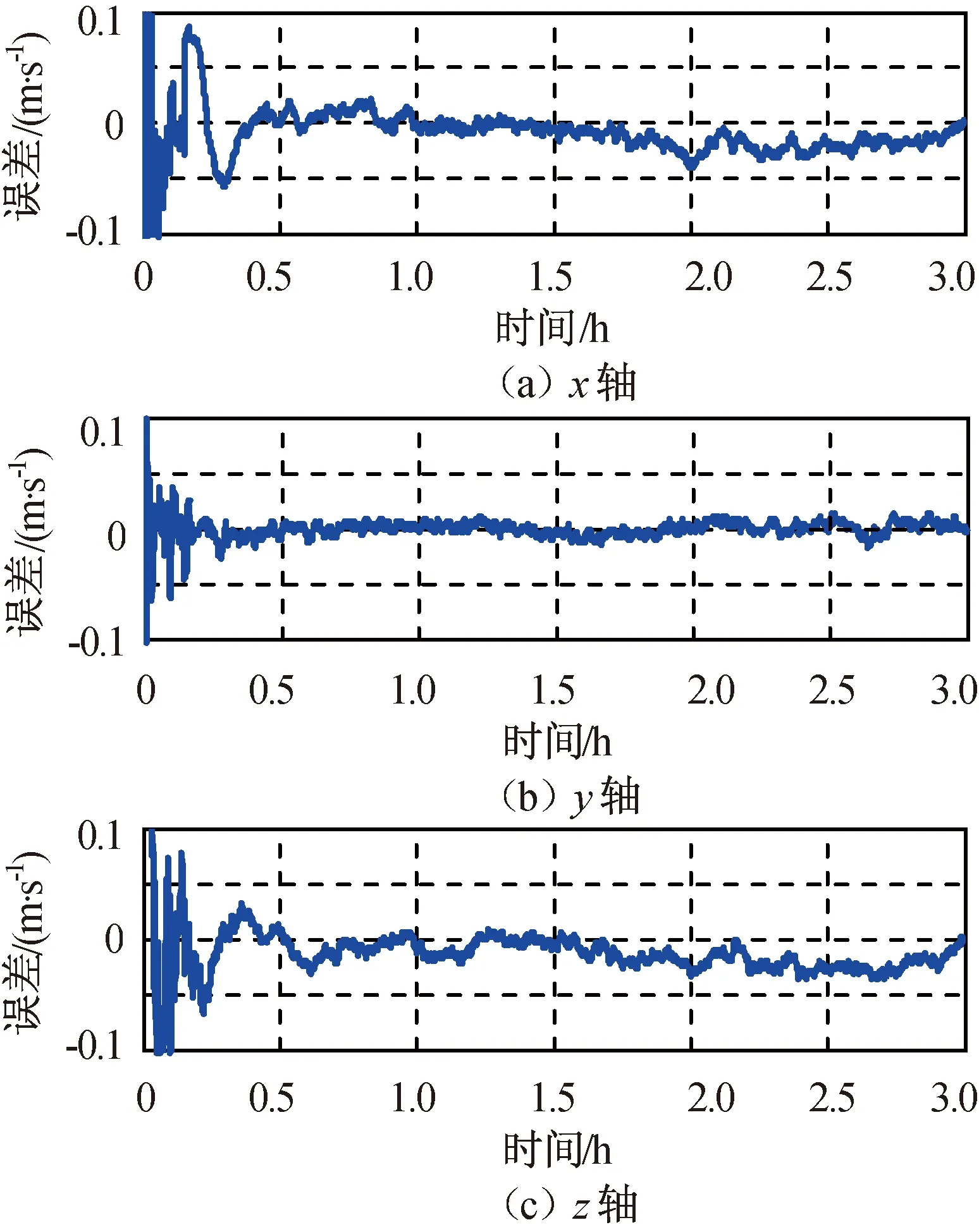
圖6 目標飛行器軌道系中相對速度誤差Fig.6 Relative velocity error in target orbit coordinate
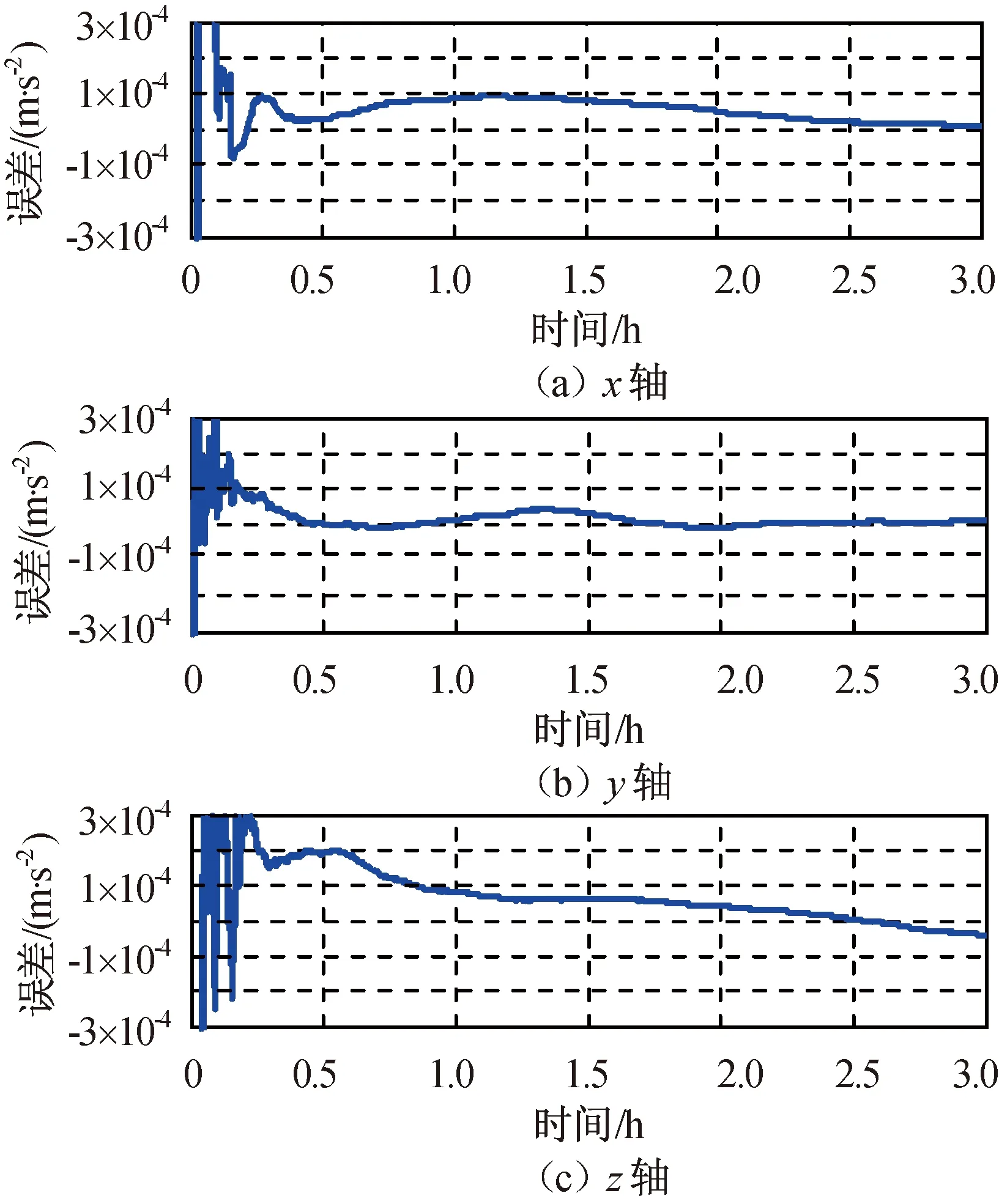
圖7 相對導(dǎo)航濾波器的加速度計常值偏差估計誤差Fig.7 Estimate error of accelerometer constant warp of relative navigation filter
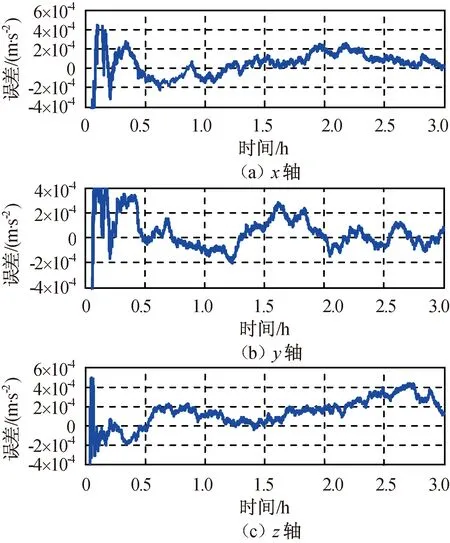
圖8 絕對導(dǎo)航濾波器的加速度計常值偏差估計誤差Fig.8 Estimate error of accelerometer constant warp of absolute navigation filter
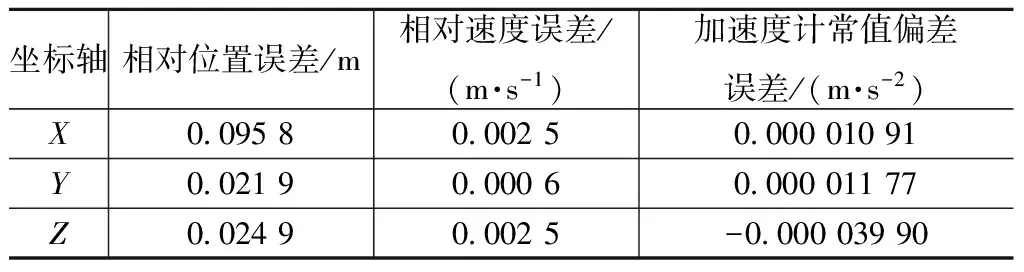
坐標軸相對位置誤差/m相對速度誤差/(m·s-1)加速度計常值偏差誤差/(m·s-2)X0095800025000001091Y0021900006000001177Z0024900025-000003990
5 結(jié)束語
本文對基于激光測距和慣導(dǎo)的非合作目標遠程交會相對導(dǎo)航算法進行了研究。設(shè)計了相對導(dǎo)航系統(tǒng),給出了相對導(dǎo)航算法及相應(yīng)的數(shù)學(xué)模型。根據(jù)激光測距儀輸出的相對距離和相對方位、俯仰角,對慣導(dǎo)得到的姿態(tài)、位置信息用卡爾曼濾波獲得相對位置與速度的誤差,并對遞推結(jié)果進行修正。研究和數(shù)學(xué)仿真發(fā)現(xiàn):在遠程交會結(jié)束時刻,本文相對導(dǎo)航方法的相對位置誤差小于1 m,相對速度誤差小于0.05 m/s;相對導(dǎo)航濾波器的加速度計常值偏差估計誤差明顯小于絕對導(dǎo)航濾波器。本文提出的相對導(dǎo)航方法,適于非合作目標遠程交會,在工程中有較好的參考價值。
[1] 楊雪勤, 王洪宇, 馮剛. 失效衛(wèi)星救援過程中相對導(dǎo)航算法研究[J]. 上海航天, 2015, 32(4): 1-7.
[2] BRYAN T C. Automated capture of spacecraft[R]. AIAA, 93-4757, 1993.
[3] 趙春慧, 李仕海. 遠程導(dǎo)引脈沖方案的有限推力修正[J]. 上海航天, 2014, 31(1): 18-21+36.
[4] KAWANO I, MOKUNO M, KASSAI T, et al. Results and evaluation of autonomous rendezvous docking experiments of ETSVI[R]. AIAA, 99-36780, 1999.
[5] PARK Y W, BRAZZELL J P, JR CARPENTER J S, et al. Test results from real-time relative global positioning system flight experiment on STS-69[R]. NASA, TM 104824, 1996.
[6] CLARK F D, SPAHAR P T, BRAZZELL J P, et al. Laser-based relative navigation and guidance for space shuttle proximity operations[R]. AAS, 03-014, 2003.
[7] GAYLOR D E, LIGHTSEY E G. GPS/INS Kalman filter design for spacecraft operating in the proximity of the international space station[R]. AIAA, 2003-5445, 2003.
[8] WOFFINDEN D C, GELLER D K. Relative angles-only navigation and pose estimation for autonomous orbital rendezvous[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(5): 1455-1469.
[9] HABLANI H. Autonomous inertial relative navigation with sight-line-stabilized integrated sensors for spacecraft rendezvous[J]. Journal of Guidance, Control and Dynamics, 2009, 32(1): 172-183.
[10] CREAMER N G. Multiple quantum well retromodulators for spacecraft-to-spacecraft laser interrogation, communication and navigation[C]// 15th AIAA/USU Small Statellite Conference. Logan, AIAA, 2001: SSC01-V1-6.
Study on Noncooperative Target Long-Distance Rendezvous Relative Navigation Based on Laser Distance Measurement and Inertial Navigation
YANG Dong-chun1, ZHAO Chun-hui2, GU Dong-qing2
(1. Shanghai Academy of Spaceflight Technology, Shanghai 201109, China; 2. Aerospace System Engineering Shanghai, Shanghai 201109, China)
A relative navigation method based on laser distance measurement and inertial navigation was studied for long-distance rendezvous of noncooperatiive target in this paper. The relative navigation system was given out which composed of laser distance measurement instrument and inertial units. The algorithm of relative navigation was designed. Relative distance and azimuth and pitching would be gained from laser distance measurement. The attitude and position of source satellite would be gained from inertial navigation. The relative orbit dynamics equation could be deserved. Meanwhile, the relative position and velocity from the equation were gained. And the relative distance, relative azimuth and pitching, the attitude and position of source satellite were acquired. The error of relative position and velocity could be gained by Kalman filtering. The real navigation message from the error and the solution of relative orbit dynamics equation was acquired. The simulation results showed that this relative navigation method was suitable to long-distance rendezvous of noncooperatiive target. The error of the relative distance was less than 1 m and the error of the relative velocity was less than 0.05 m/s as well as the estimation error of the constant drift for the accelerometer of the relative navigation filter was smaller than that of the absolute navigation filter at the end of long-distance rendezvous.
Noncooperative target; Long-distance rendezvous; Relative navigation; Laser distance measurement; Inertial navigation; Relative orbit dynamics; Relative distance; Relative attitude; Kalman filtering
1006-1630(2016)04-0075-06
2015-12-22;
2016-05-09
楊東春(1975—),男,高級工程師,主要研究方向為新型航天器總體設(shè)計。
V448
A
10.19328/j.cnki.1006-1630.2016.04.013
猜你喜歡
測控技術(shù)(2018年11期)2018-12-07 05:49:38
測控技術(shù)(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
中國慣性技術(shù)學(xué)報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36