空間索網天線展開遞推動力學建模方法研究
2016-12-20 05:36:52劉付成孫宏麗朱東方
上海航天 2016年4期
劉付成,孫宏麗,朱東方,孫 俊
(1.上海市空間智能控制技術重點實驗室,上海 201109; 2.上海航天控制技術研究所,上海 201109)
?
空間索網天線展開遞推動力學建模方法研究
劉付成1、 2,孫宏麗1、 2,朱東方1、 2,孫 俊1、 2
(1.上海市空間智能控制技術重點實驗室,上海 201109; 2.上海航天控制技術研究所,上海 201109)
針對大型空間可展開天線自由度多、非線性強特點,為對其展開實施有效控制,提出一種周邊桁架空間機構的多自由度系統快速遞推建模方法。用有限段方法處理桿件彈性部分,用等效力矩代替腹桿的驅動和鎖定作用,將周邊桁架雙重閉環構型等價為鏈式多體系統。對索網大型天線用空間算子代數遞推建模,求解動力學響應可模擬獲得天線變形的運動和所需各驅動力矩。數值算例中獲取了加速段和減速段關節空間的角位移和角速度,以及關節空間驅動力矩。研究表明該法是一種高精度、高效率的動力學遞推建模方法,可適于大型可展開機構的快速計算,對實際工程中天線展開的參數設計和力學分析有一定的指導意義。
空間索網天線; 展開過程; 等效力矩; 周邊桁架雙重閉環構型; 鏈式多體系統; 空間算子代數; 角位移; 角速度; 空間驅動力矩
0 引言
隨著航天任務多樣化,星載大型桁架式網狀拋物面天線是滿足移動通信、對地遙感和深空探測等空間應用的關鍵設備。這種天線質量小、強度高,在空間展開式天線領域也有廣闊的發展前景[1]。展開過程動力學分析是空間可展結構研究的關鍵之一,但其幾何拓撲關系復雜,桿件和節點多,機構自由度多,若用經典多體力學理論分析桁架結構的展開運動過程,未知量多、建模復雜、效率低[2-3]。另由于彈性的存在,彈性變形成為不可忽略的因素,與整體的剛性大位移存在強耦合,使展開過程的動力特性十分復雜,對其展開過程的控制涉及振動、軌跡、展開速度控制等多方面[4]。文獻[5]基于多剛體系統動力學Lagrange方法,采用廣義坐標法并考慮耗散力、鉸鏈處扭簧的驅動力及索網預張力對展開過程的影響,建立了周邊桁架可展天線展開過程的動力學模型,根據規劃的天線展開運動得出相應的驅動力。文獻[6]在可展結構中設置剛性體以有效提高展開效率,保證形狀精度。文獻[7]用遞推動力學建模方法對星載天線機構進行了動力學分析,表明該算法可滿足動力學實時仿真及控制系統設計要求。索網天線的剛度和強度主要是由桁架的豎桿提供,中間部分的拉索只用于調節網狀形面精度[8-9]。商業軟件雖能對索網活動節點位置進行預測,但難以進行控制應用[10]。為此,本文用剛度分析方法對天線展開過程系統參數預估及其受力狀態設計進行了研究。
1 索網天線展開建模方法
1.1 基本空間算子定義
定義第k個剛體于內鉸Ok處建立連體坐標系。常用基本算子有:剛性力移位算子φ(k+1,k);為鉸Ok+1,Ok間位移矢量的叉乘矩陣;Rk+1,k為第k+1,k個連體坐標系間旋轉變換矩陣;第k體空間慣量質量;J(k)∈R3×3為相對Ok處的慣量張量;p(k)為第k體質心至連體坐標系原點的位移矢量;為位移矢量對應的叉乘矩陣;m(k)為第k體質量;H(k)∈Rnr(k)×6為從狀態空間至關節空間的投影算子;nr(k)為第k個鉸關節的自由度。
1.2 一般樹形拓撲結構說明
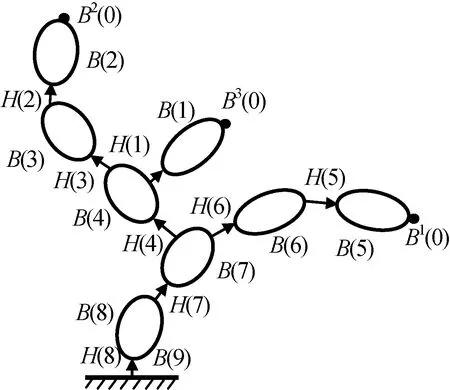
圖1 一般樹形多體系統拓撲結構Fig.1 Tree topology of multibody system dynamics
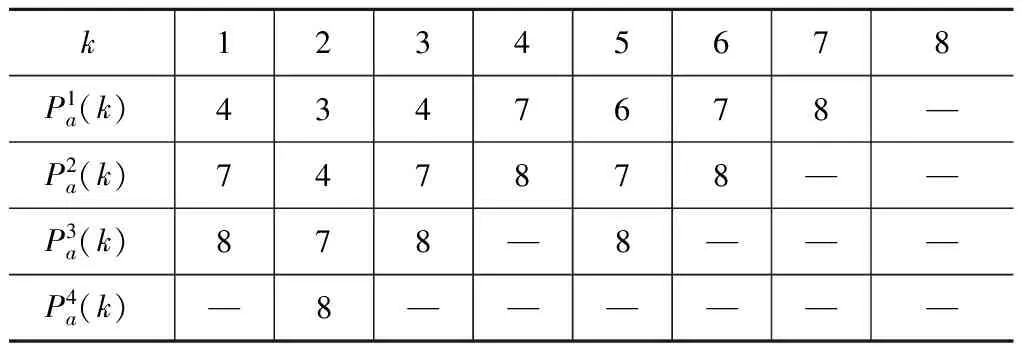
表1 低序體列陣
由表1可知:Pa(k)列中未出現的體號1、2、5屬末端體,重復出現的體號4、7屬分枝體,且重復出現數次,表明有多個分枝(此處為2個)。鏈式系統是樹形系統的特例,因其Pa(k)=k+1。組成的低序體列陣中,不被其它列包含的低序體列陣為一個分支鏈,此處一個分鏈由體1、4、7、8組成;一個分鏈由體2、3、4、7、8組成;另一個分鏈由體5、6、7、8組成。
1.3 混合動力學遞推算法
根據機構各鉸關節狀態,可將問題歸為兩類:反向動力學用于求出各驅動關節力或力矩;正向動力學用于求出各關節的角加速度。混合動力學可同時計算上述兩類問題,特別適于欠驅動系統的動力學建模。索網天線鉸驅動關節按預定軌跡展開,屬于反向動力學問題。展開過程會影響衛星本體的姿態指向,為正向動力學問題。
混合遞推與正向動力學建模相似,可包括以下步驟:按鉸接體慣量方法計算系統的慣量;從頂端n體到基體1體的殘余力的遞推計算;正向動力學加速度計算。
a)鉸接體慣量計算
P+(0)=0;
fork=1,…,n,
P(k)=φ(k,k-1)P+(k-1)φ*(k,k-1)+Mm(k)∈R,

ifk∈Ia,
else
D(k)=H(k)P(k)H*(k)∈R,
G(k)=P(k)H*(k)(D(k))-1∈R,
K(k+1,k)=φ(k+1,k)G(k)∈R,

end if


b)冗余力遞推計算
z+(0)=0,
fori=1,…,n,
ifk∈Ia,
z(k)=φ(k,k-1)z+(k-1)+P(k)×a(k)+H*(k)β(k)+b(k)+K(k)?(k),
z+(k)=z(k),
else
z(k)=φ(k,k-1)z+(k-1)+P(k)×a(k)+b(k)+K(k)?(k),
ε(k)=T(k)-H(k)z(k),
v(k)=(D(k))-1ε(k),
z+(k)=z(k)+G(k)ε(k),
end if
end loop
式中:z+(0)為分支末端體外結點處偏置力;a(k)為第k個體的哥氏加速度、離心加速度算子;β(k)為鉸關節空間速度;b(k)為第k個剛體哥氏力、離心力算子;K(k)為剛體移位Kalman增益算子;?(k)為關節角度;ε(k)為關節驅動遞推移位算子;T(k)為狀態空間力偶;v(k)為關節空間加速度。
c)系統加速度和主動力遞推計算
α(N+1)=0,
fori=1,……,n,
ifk∈Ia,

T(k)=H*(k)f(k),
else

end if

end loop
式中:α(k),f(k),T(k),χ(k)分別為第k體加速度、關節廣義力、狀態空間廣義力和絕對加速度。借鑒Kalman濾波方法的計算結構,即分為向內的濾波過程和向外的遞推過程平滑。通過找到滿足與離散卡爾曼濾波的Riccati方程類似的微分方程實現。
2 索網天線展開過程等效模型
兩個桁架單元的展開如圖2所示。展開原理為連續的展開索依次穿過桁架單元的可伸縮對角桿,通過電機帶動展開索收縮展開環形桁架。在結點B、D、F處各有同步齒輪1對,保證整個桁架在展開過程中的同步,即在展開過程中各矩形單元始終保持形狀相同。當桁架運動至完全展開狀態時,可伸縮對角桿AE、CE中的細管分別頂在頂點A、C,阻止其進一步運動,同時弦桿運動至與豎桿垂直位置,節點蓋板間的填充限位件與弦桿連接件緊密接觸,阻止其轉動。
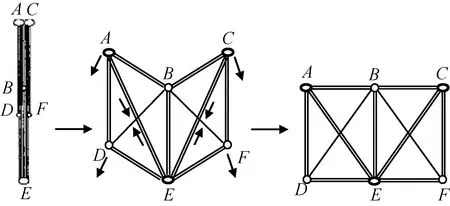
(a)收縮狀態 (b)展開過程中 (c)完全展開圖2 兩個桁架單元展開Fig.2 Deploying sketch map of two truss cell
分析發現其中含雙重閉環,問題非常復雜,對其進行簡化,先去除腹桿,只剩下3主桿根,用等效力矩替代腹桿的驅動和鎖定作用,則就轉為對鏈式結構進行動力學建模,如圖3所示。
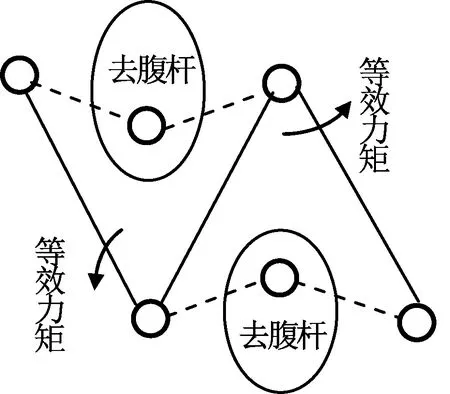
圖3 用等效力矩簡化Fig.3 Simplification by equivalent moment
3 數值實例
本文以周邊桁架天線展開為研究對象,仿真中取參數為:彈性模量90 GPa,泊松比0.33,天線桿件直徑0.035 m,每個豎桿和橫桿的長度1.414 m,豎桿、橫桿、對角桿密度1 900 kg/m3,衛星本體質量3 404.5 kg,質心位置(1 069,-2,2 340),轉動慣量
設衛星初始位置和速度置分別為
桁架展開過程規劃經歷加速-勻速-減速過程,共用時1 800 s,不同時間的規劃展開鉸鏈角速度如圖4所示。
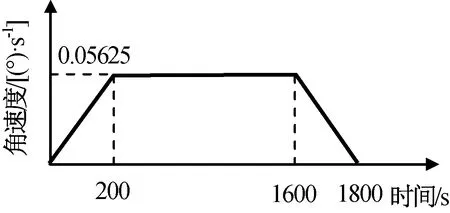
圖4 規劃的鉸鏈展開角速度Fig.4 Angle velocity of joint deploying
仿真時間2 000 s,分別對50個桁架單元的桁架結構展開進行數學仿真計算,其中加速段0~200 s中部分關節鉸鏈的驅動力矩如圖5、6所示;減速段1 600~1 800 s內關節鉸鏈的驅動力矩如圖7、8所示。不同自由度展開機構展開過程所需時間:桁架單元50個為47.971 s;桁架單元100個為1 min 32.483 0 s;桁架單元1 000個為15 min 45.202 0 s。
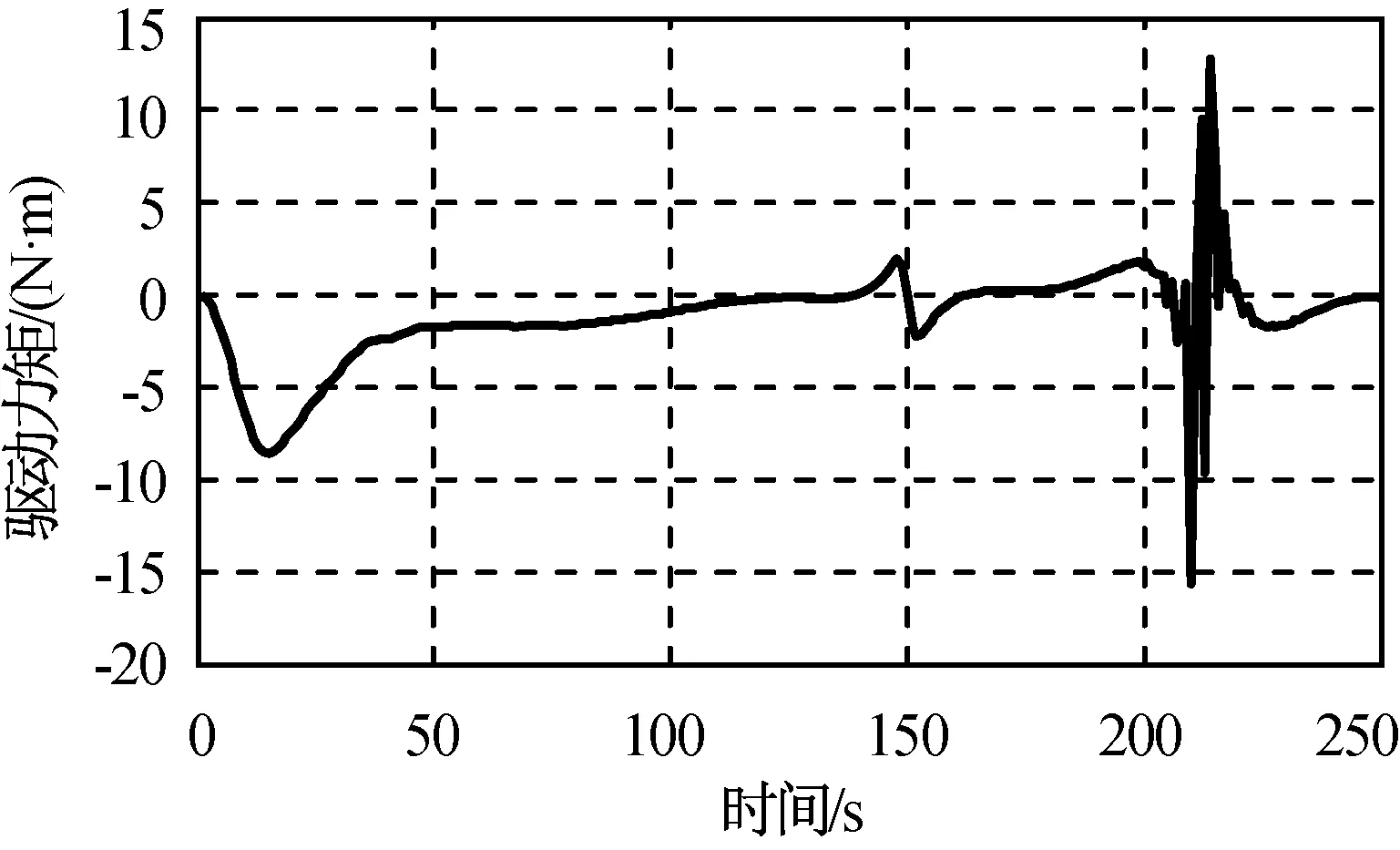
圖5 加速段關節1鉸鏈驅動力矩Fig.5 Drive moment of joint 1
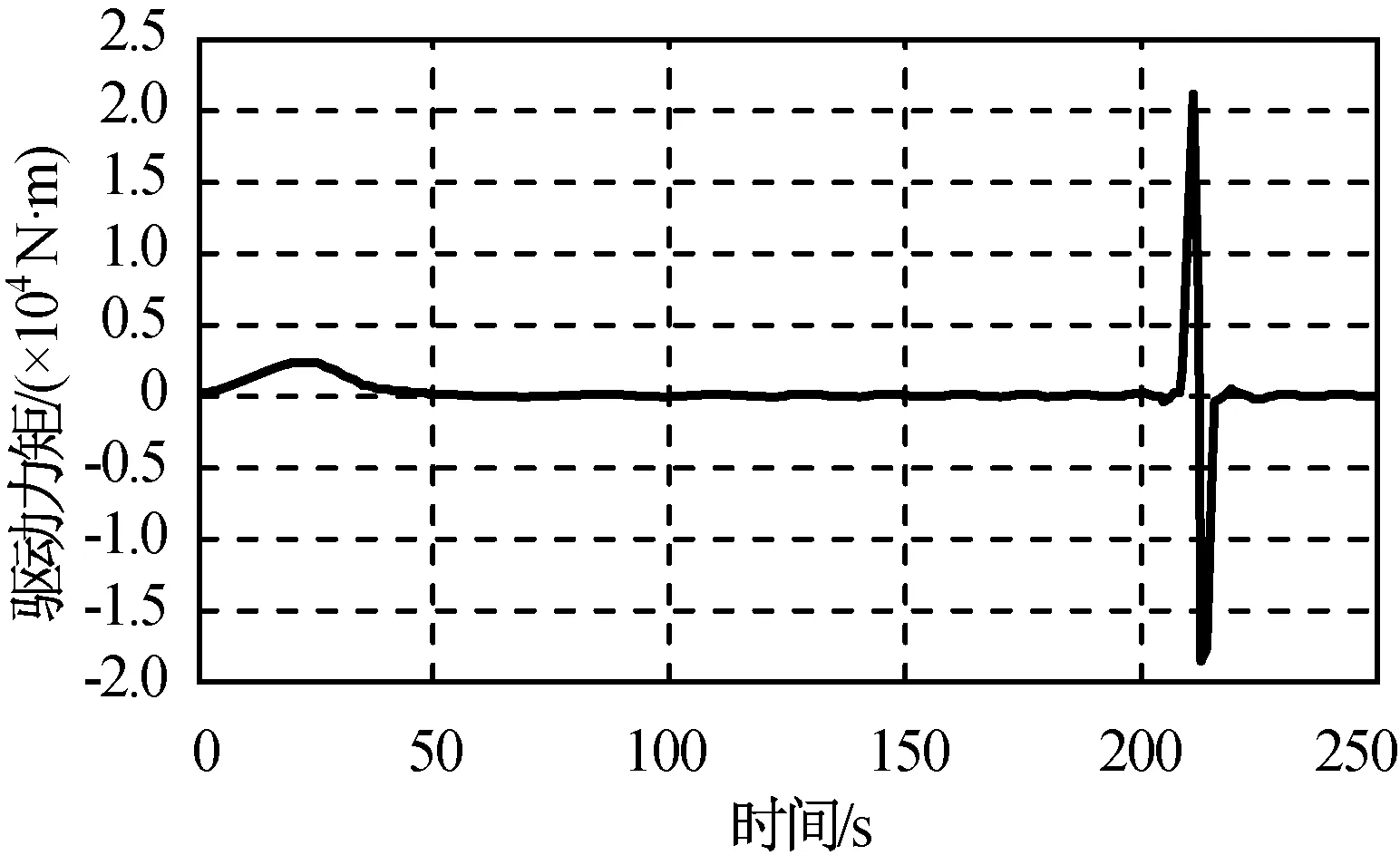
圖6 加速段加速段關節10鉸鏈驅動力矩Fig.6 Drive moment of joint 10
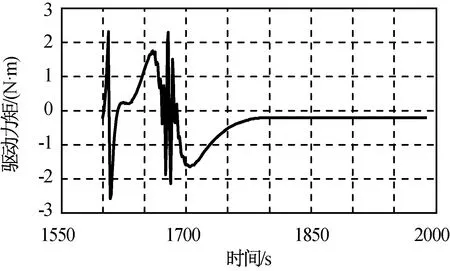
圖7 減速段關節1鉸鏈驅動力矩Fig.7 Drive moment of joint 1
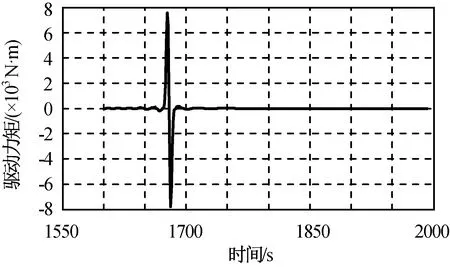
圖8 減速段關節10鉸鏈驅動力矩Fig.8 Drive moment of joint 10
由仿真結果可知:按電機驅動角速度設計策略桁架能保持平穩展開。分析鉸鏈中間處鉸鏈展開驅動力矩,可發現在加速和降速段,鉸鏈1處的最大力矩分別為13,2.2 N·m,最小力矩分別為約-15.5,-2.5 N·m;鉸鏈10處的最大力矩分別為22 000,7 500 N·m,最小力矩分別為約-18 000,-7 800 N·m。總體來說,本文規劃能使桁架有效展開,用遞推動力學建模算法對多自由度大型桁架或天線結構的展開計算分析可行。
4 結束語
本文用空間算子代數動力學遞推建模方法,將
含雙閉環索拓撲結構的網動力學建模轉為采用等價力矩的鏈式多體系統動力學模型,理論上提高了動力學模型的復雜性和計算速度。該方法適于大型可展開機構的快速計算。對實際工程中天線的展開過程的參數設計、力學性能分析具有一定的指導意義,但實用性還有待試驗確認。
[1] HIROAKI T. Design optimization studies for large-scale contoured beam deployable satellite antennas[J]. Acta Astronatica, 2006, 58: 443-451.
[2] 趙孟良, 吳開成, 關富玲. 空間可展桁架結構動力學分析[J]. 浙江大學學報(工學版), 2005, 39(1): 1669-1674.
[3] 李波, 陳曉峰. 空間桿狀構架式展開機構拓撲型綜合與分析[J]. 上海航天, 2015, 32(1): 25-29.
[4] 張逸群, 張志華. 柔性周邊桁架可展開天線展開過程動力學分析和組合控制方法[J]. 高技術通訊, 2011, 21(7): 750-755.
[5] 李團結, 張琰, 李濤. 周邊桁架可展天線展開過程動力學分析及控制[J]. 航空學報, 2009, 30(3): 444-449.
[6] 吳明兒, 項平. 含剛性體可展開結構的展開過程動力學分析方法[J]. 計算力學學報, 2011, 28(5): 653-681.
[7] 游斌弟, 趙志剛, 魏承, 等. 基于空間算子代數的星載天線機構動力學計算[J]. 兵工學報, 2011, 32(1): 85-90.
[8] 保宏, 段寶巖, 尤國強. 索網式展開天線網面精度調整的控制方法[J]. 應用力學學報, 2008, 25(1): 154-157.
[9] 楊東武, 仇原鷹, 保宏. 基于Moore-Penrose逆的索網天線預拉力設計方法[J]. 機械工程學報, 2012, 48(21): 22-27.
[10] 郭永衛, 王啟明. 索網機構的理論建模與位置求解[J]. 機械工程學報, 2010, 46(1): 18-23.
[11] 劉云平, 吳洪濤, 方喜峰, 等. 移位算子及其對多體系統結構的描述[J]. 南京航空航天大學學報, 2008, 40(5): 687-691.
Study on Recursive Dynamic Modeling and Simulation of a Cable-Truss Deployable Space Antenna
LIU Fu-cheng1, 2, SUN Hong-li1, 2, ZHU Dong-fang1, 2, SUN Jun1, 2
(1. Shanghai Space Intellective Control Technology Lab, Shanghai 201109, China; 2. Shanghai Institute of Spaceflight Control Technology, Shanghai 201109, China)
Due to many degrees of freedom and nonlinearity of large deployable space antenna, a fast recursive modeling with multi-degree of freedom system of a cable truss deployable space mechanism was given in this paper in order to give a better control to the deployment. The elastic parts were treated by the finite segment, and meanwhile the driven and locking of brace were replaced by the equivalent moment. As a result, the large cable-truss double closed loop was equivalent to the chain multi-body system. Large cable-truss antenna was modeled by spatial operator algebra, and the antenna deformation motion and driven moment were obtained by computation of solving dynamic response. The spatial angular displacement, angular velocity and driving moment of the joint in acceleration and deceleration phase were gained in a sample. The study showed that the method proposed was a recursive dynamic modeling with high accuracy and efficiency which was suitable to the fast computation of large deployable mechanism. The study is valuable to the parameter design and mechanic analysis of the antenna deployment in engineering.
Cable-truss deployable space antenna; Deployable process; Equivalent moment; Cable truss double closed loop; Chain multibody system; Spatial operator algebra; Angular displacement; Angular velocity; Spatial driving moment
1006-1630(2016)04-0021-05
2015-12-13;
2016-04-26
上海市自然科學基金資助(16ZR1415700)
劉付成(1973—),男,研究員,主要從事航天器姿態控制研究。
V443.4; TP391.9
A
10.19328/j.cnki.1006-1630.2016.04.004