高超聲速飛行器仿真模型驗證研究
2016-12-19 00:38:04吳曉燕
彈箭與制導學報 2016年4期
馬 震,吳曉燕
(空軍工程大學防空反導學院,西安 710051)
?
高超聲速飛行器仿真模型驗證研究
馬 震,吳曉燕
(空軍工程大學防空反導學院,西安 710051)
針對高超聲速飛行器仿真模型是否可信的問題,在對常用模型驗證方法優缺點與適用范圍分析的基礎上,提出高超聲速飛行器仿真模型驗證方案。采用時、頻域方法,對高超聲速飛行器仿真模型進行驗證,得出仿真模型的可信度。實驗結果表明,采用時、頻域分析方法,為高超聲速飛行器仿真模型的可信度評估提供了一種較為有效的方法和途徑。
高超聲速飛行器;模型驗證;時頻域分析
0 引言
高超聲速飛行器(hypersonic flight vehicle,HFV)通常指飛行速度大于5Ma的飛行器,具有非常重要的戰略意義,以其獨特的優勢成為各國研究的重點。然而,由于HFV飛行非線性、強耦合和不確定性等因素,其仿真模型是否可信,能否正確反映原理模型的性能,是仿真界當前研究的熱點和難點。國內外對HFV模型驗證所做的研究不多,目前,從公開報道的文獻得知,只有國內部分學者在這方面做了一些有意義的探索。北京大學的黃琳院士在文獻[1]中分析了HFV對控制科學構成的挑戰,同時也提到亟需一套有效的HFV建模與驗證方法。天津大學的張希斌在文獻[2]中提出了一種可行的HFV模型驗證方案,將可信度等級較高的真實HFV模型作為參照,對真實模型的輸出數據和簡化模型的輸出數據進行一致性比較,從而驗證簡化模型的有效性,另外張希斌在文獻[3]中提出了基于小波變換的HFV模型驗證方案,但并沒有提出一套完整的HFV仿真模型驗證方案。文中在已有研究的基礎上,分析現有模型驗證方法優缺點和適用性,對HFV仿真模型的驗證進行了系統的研究。
1 高超聲速飛行器巡航段仿真
針對高超聲速飛行器仿真系統,以X-43A型飛行器為對象,進行巡航段飛行仿真實驗,仿真系統主要涉及多個模塊,各模塊之間相互關聯,包括:1)控制量輸入模塊;2)控制器模塊;3)力和力矩計算模塊;4)縱向運動模塊。系統組成模塊及關系如圖1所示。
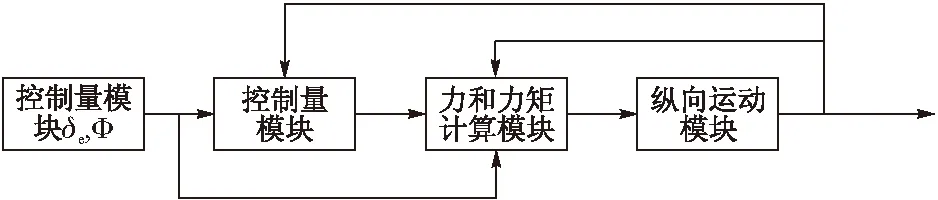
圖1 HFV仿真系統組成模塊及各模塊間的關系
圖1中,控制輸入量為燃料/空氣混合比Φ和升降舵偏角δe,仿真輸出為5個剛體狀態量(V,h,γ,α,Q)。仿真結果如圖2所示。
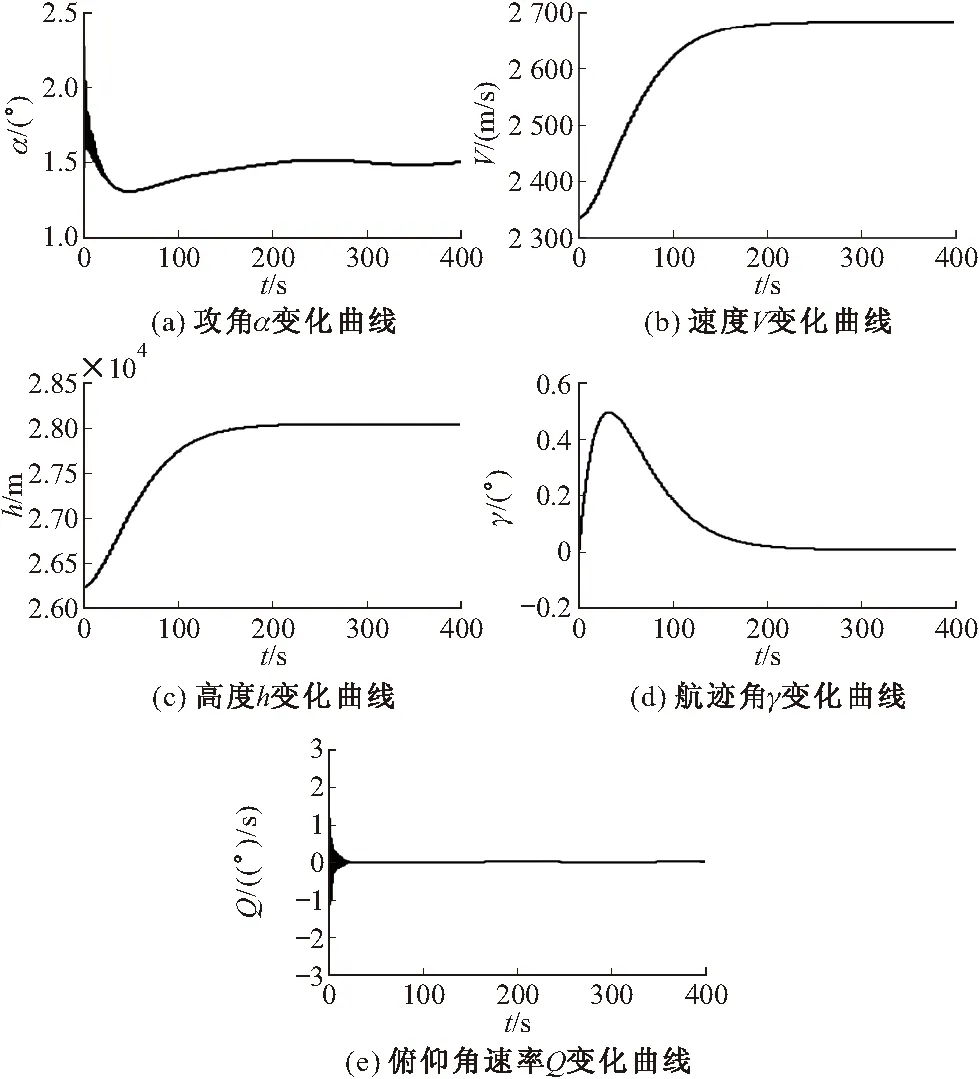
圖2 HFV縱向運動數字仿真
由于受機身氣動熱載荷、超然沖壓發動機工作條件等諸多因素限制,高超聲速飛行器縱向平面具有一定的飛行范圍,需滿足飛行限制條件,即通常所說的飛行包線。根據文獻[4-6]的報道,HFV縱向平面飛行包線如表1所示。
從圖2(a)~圖2(e)可以看出,各狀態變量的仿真結果都在飛行包線參數容許的范圍內變動,0~30 s攻角的變化比較劇烈,俯仰角速率與之相似;200 s之前屬于爬升階段,高度和速度隨時間的變化基本一致,越來越大,之后上升到最高點,高度和速度維持不變,航跡角趨向于一個穩定的值。整個飛行過程中攻角都維持在1.5°左右,整個仿真效果比較理想。

表1 HFV飛行包線參數范圍
2 仿真模型驗證方法
模型驗證是從模型預期使用的角度出發,確定模型和有關數據代表真實世界正確程度的過程,傳統的仿真模型動態驗證方法一般分為時域方法和頻域方法,其中時域方法一般不需要對原始時間序列進行復雜的變換和處理,且原理簡單、實現方便,以TIC不等式系數法、灰色關聯分析法等最具代表性。而頻域方法則對動態響應時間序列有一些特殊需求,如平穩性等,一般需要對原始時間序列進行變換和處理,此類方法中比較有代表性的是譜估計法。兩類方法都能從不同的角度實現對仿真模型的動態驗證,是仿真模型驗證領域常用方法。
模型驗證方法按判斷標準的不同劃分,常用模型驗證方法分類如表2所示。

表2 常用模型驗證方法分類
3 HFV仿真模型驗證
3.1 HFV仿真模型驗證方案

圖3 HFV模型驗證總體方案
針對高超聲速飛行器仿真模型進行驗證,驗證的基本思想如圖3所示,即將動力學原理模型作為參照,考察在相同輸入條件下,仿真模型輸出與原理模型輸出的一致性程度,其中仿真模型的輸出為待驗證數據,稱為仿真數據,動力學原理模型輸出為參考數據。
HFV仿真模型共有5個輸出,即高度h、速度V、攻角α、航跡角γ以及俯仰角速率Q。參照文獻[2-3]對HFV仿真模型的驗證方案,這里只研究攻角α的驗證,其它4個狀態的驗證與之相似。
首先做初步的驗證,可以繪制出攻角α隨時間t的變化曲線,如圖4所示。

圖4 攻角α隨時間的變化曲線
由圖4可知,攻角α仿真數據和參考數據曲線基本一致,但這僅僅是一種主觀定性的方法,不能給出置信水平,接下來應用時頻域法進行驗證。
3.2 基于時域法的HFV仿真模型驗證
由于仿真數據和參考數據的分布未知,同時樣本容量很大,不適合采用t檢驗和F檢驗進行仿真模型驗證。因此,文中驗證的思路為:首先選取均值、方差和標準差作為基本性能參數,檢驗兩樣本的基本性能參數是否一致,然后采用秩和檢驗法驗證兩樣本概率分布的一致性。若兩樣本的均值、方差和標準差基本一致,又服從同一概率分布,則HFV仿真模型有效。
分別對仿真曲線和參考曲線進行采樣,采樣周期T=0.1 s,采樣點為N=4 000,仿真數據序列和參考數據序列的均值、方差和標準差計算結果如表3所示。

表3 攻角α均值、方差及標準差計算結果
由表3可以得出,仿真數據和參考數據的均值、方差和標準差幾項性能指標相差無幾,可以初步判斷兩組序列基本一致,接下來需要對其概率分布的一致性進行驗證。
由秩和檢驗法對兩樣本概率分布的一致性進行檢驗,結果為兩樣本服從同一概率分布,驗證通過。
通過數理統計法的驗證,可以得出仿真數據與參考數據的均值、方差、標準差和概率分布具有很高的一致性,下面利用動態分析法驗證仿真數據與參考數據在空間上的一致性。
1)TIC不等式系數法驗證攻角α
①計算仿真數據和參考數據差值的平方和并開方
②分別計算仿真數據和參考數據的平方和并開方
③計算兩組序列的TIC不等式系數
由計算結果可以看出,攻角α仿真數據與參考數據具有較好的一致性。
2)灰色關聯分析法驗證攻角α
①分別計算仿真數據和參考數據差值模的最小值及最大值
②取ξ?[0.1,0.5],計算兩組序列的灰色關聯度,如表4所示。

表4 不同分辨率對應的關聯度
由表4可知,對于不同的分辨率要求,仿真數據與參考數據都具有較好的一致性。
3.3 基于頻域法的HFV仿真模型驗證
利用周期圖法[7]對攻角α進行驗證,首先對仿真數據和參考數據進行平穩化預處理,計算其傅里葉變換,再取其幅值的平方除以采樣點作為時間序列的真實譜估計,周期圖法的計算公式為:


圖5 攻角數據周期圖譜估計
通過對攻角信號的譜分析可知,周期圖譜估計法存在一定的缺陷,當數據長度較大時譜曲線起伏加劇。由圖5可知,仿真數據和參考數據的譜估計曲線基本一致,可以初步判斷仿真模型有效。但是通過譜圖只能定性判斷譜線具有相容性,帶有一定的主觀性,應進一步采用定量方法進行驗證。
文獻[8]中證明了假設成立的條件,即:

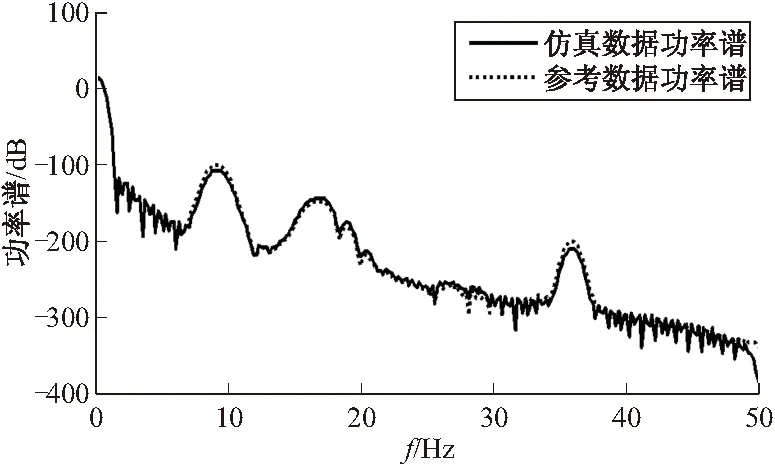
圖6 攻角數據窗譜估計

圖7 置信帶曲線
3.4 時頻分析法的驗證
從攻角輸出時間序列可以看出,兩組攻角數據都是非平穩信號,若采用傅里葉譜分析進行模型驗證必須先對待驗證數據進行預處理,從而造成原始信號局部信息的丟失。針對HFV仿真模型的特點,參考文獻[9]中提到的導彈仿真驗證的CLIMB方案,即等級高的數據其置信度也比較高,通過不同等級數據的比較分析,用高等級數據修正低等級數據,最終達到對導彈仿真模型驗證的目的。
HFV原理模型輸出數據(參考數據)屬于高等級,仿真模型輸出數據為低等級,選擇窗函數為高斯窗,即η(t)=21/4e-πt2,這時STFT就變為比較常見的Gabor變換,由前面的分析可知,Gabor變換可以得到信號局部時間內的頻域特性,因此采用Gabor變換對俯仰角速率進行驗證,攻角的仿真數據和參考數據Gabor變換的幅值及時頻分布分別如圖8~圖11所示。
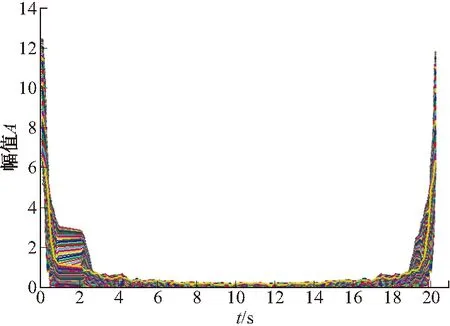
圖8 仿真數據Gabor變換幅值
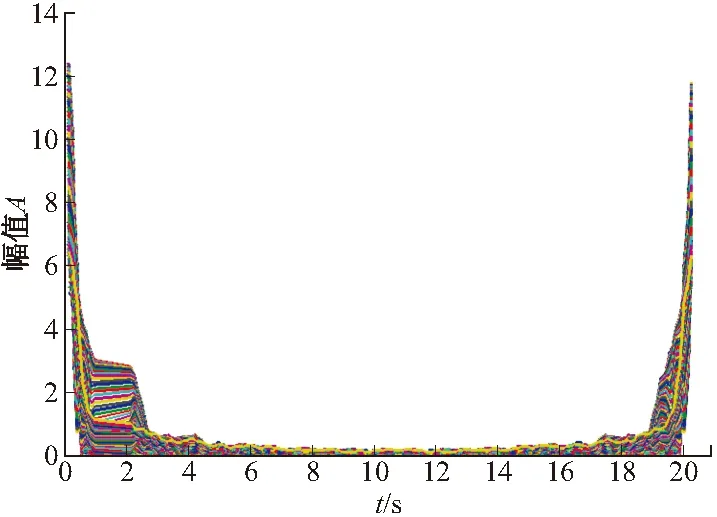
圖9 參考數據Gabor變換幅值
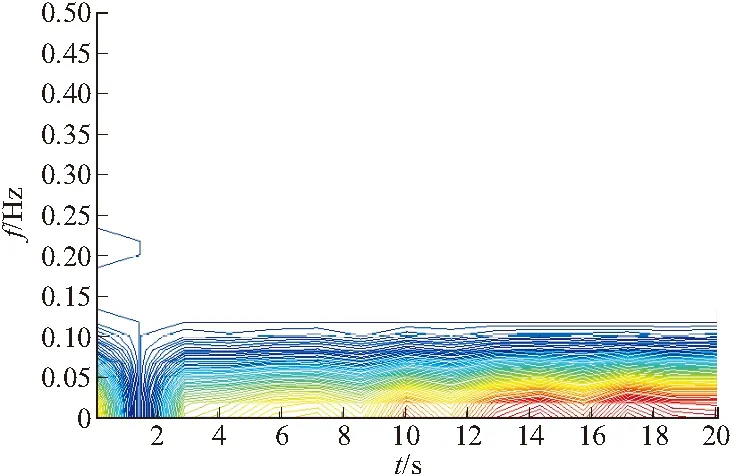
圖10 仿真數據時頻分布

圖11 參考數據時頻分布
由圖8~圖11可以得知,仿真模型輸出數據和參考數據的Gabor變換幅值的分布幾乎一致,兩組數據經過變換后在時頻域的一致性也很好,這說明仿真模型具有較高的可信性。
4 小結
針對高超聲速飛行器可信度問題,文中主要研究了HFV模型驗證的時域法和頻域法,各種方法都具有一定的通用性同時又各具特點。時域法中參數估計法一般要求大樣本,樣本還要服從某一分布,因此不能單獨使用,應與其他方法綜合起來驗證仿真模型;動態分析法中,TIC不等式系數法對時間序列沒有具體要求,且易于編程實現,使用簡單,但只是一種定性驗證,不能給出定量指標,灰色關聯分析法只能判斷兩時間序列發展態勢的一致性,不能判斷其在空間上的舉例,因此不能單獨使用;譜分析法頻域定位精確,分辨率高,但要求時間序列滿足弱平穩條件,因此使用上受到了一定的限制;時頻分析法同時兼顧了時域特征和頻域特征,可以處理非平穩的時間序列,為HFV仿真模型驗證提供了新的思路。
[1] 黃琳, 段志生, 楊劍影. 近空間高超聲速飛行器對控制科學的挑戰 [J]. 控制理論與應用, 2011, 28(10): 1497-1505.
[2] ZHANG Xibin, ZONG Qun. Wavelet coherence analysis approach to model validation of the hypersonic vehicle model [C]∥Proceedings of the 32nd Chinese Control conference, 2013.
[3] ZHANG Xibin, ZONG Qun. Spectrum Analysis Approach to Model Validation of the Hypersonic Vehicle Model [C]∥2012 IEEE 6th Internation Conference on Information and Automation for Sustainablility, 2012: 71-75.
[4] 葛東明. 臨近空間高超聲速飛行器魯棒變增益控制 [D]. 哈爾濱: 哈爾濱工業大學, 2011.
[5] WILLIAMS T, BOLENDER M A, DOMAN D B, et al. An aerothermal flexible mode analysis of hypersonic vehicle [C]∥AIAA Atmospheric Flight Mechanics Conference and Exhibit. Keystone, Colorado: AIAA, 2006: 1-22.
[6] PAKER J T, SERRANIA A, YURKOVICH S, et al. Control-oriented modeling of an air-breathing hypersonic vehicle [J]. Journal of Guidance, Control and Dynamics, 2007, 30(3): 856-869.
[7] 王鳳瑛, 張麗麗. 功率譜估計及其Matlab仿真 [J]. 仿真技術, 2006, 22(11): 287-289.
[8] 李鶴, 呂巖, 楊明權. 基于頻譜分析的飛行模擬器飛行性能驗證 [J]. 軍械工程學院學報, 2008, 20(6): 33-37.
[9] 符文星, 朱蘇朋, 王建華, 等. 小波變換在導彈仿真模型驗證中的應用研究 [J]. 彈箭與制導學報, 2006, 26(2): 174-176.
Research on HFV Simulation Model Validation
MA Zhen,WU Xiaoyan
(Air and Missile Defense College, Air Force Engineering University, Xi’an 710051, China)
To solve the problem of simulation credibility of the hypersonic flight vehicle (HFV) model, a way about HFV validation was researched based on characteristics and applicability of validation algorithms. The result of simulation credibility about HFV model was calculated through time and frequency domain analysis methods of validation. Example shows that the solution to the simulation credibility problem of HFV model is effective with time and frequency domain analysis methods.
hypersonic flight vehicle; model validation; time and frequency domain analysis
2015-07-11
陜西省自然科學基礎研究計劃資助
馬震(1986-),男,陜西渭南人,碩士研究生,研究方向:建模與仿真。
TP391.9
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
燕山大學學報(2015年4期)2015-12-25 02:19:49
Coco薇(2015年1期)2015-08-13 02:47:34
